
The Six-Variable Model
Context Modelling Enabling Systematic Reuse of Control Software
Nelufar Ulfat-Bunyadi, Rene Meis and Maritta Heisel
paluno - The Ruhr Institute for Software Technology, University of Duisburg-Essen, Essen, Germany
Keywords:
Four-Variable Model, Context, Context Modelling, Contextual Decision, Satisfaction Argument, Domain
Knowledge, Requirement, Specification.
Abstract:
A control system usually consists of some control software as well as sensors and actuators to monitor and
control certain quantities in the environment. The context of the control software thus consists of the sensors
and actuators it uses and the environment. When starting development of the control software, its context
is often not predefined or given. There are contextual decisions the developers can make (e.g. which sen-
sors/actuators/other systems to use). By means of these decisions, the context is defined step by step. Existing
approaches (like the Four-Variable Model) call for documenting the environmental quantities (monitored,
controlled, input, and output variables) that are relevant after making these contextual decisions. The en-
vironmental quantities that have originally been relevant (i.e. before deciding which sensors/actuators/other
systems to use) are not documented. This results in problems when the software shall later on be reused in
another, slightly different setting (e.g. with additional sensors). Then, it is hard for developers to decide which
environmental quantities are still relevant for the software. In this paper, we suggest an extended version of the
Four-Variable Model, the Six-Variable Model, and, based on that, a context modelling method, that combines
existing approaches. The benefit of our method is that the environmental quantities that are relevant before
and after decision making are documented as well as the contextual decisions themselves and the options that
were selectable. In this way, later reuse of the software is facilitated.
1 INTRODUCTION
A control system usually consists of the control soft-
ware as well as sensors and actuators for monitoring
and controlling the environment (Parnas and Madey,
1995). The context of the control software comprises
the sensors and actuators it uses as well as the envi-
ronment it monitors/controls by means of them (Jack-
son, 2001). So, context modelling refers to modelling
or documenting this context.
The famous Four-Variable Model was suggested
by Parnas and Madey in 1995 and focuses also on
control systems (Parnas and Madey, 1995). It defines
the content of software documentation. Software doc-
umentation consists of different types of documents
(e.g. System Design Document, Software Require-
ments Document). Parnas and Madey describe these
documents as representations of one or more math-
ematical relations. These relations exist between the
following four types of variables: monitored variables
m (environmental quantities that the software mon-
itors through input devices, e.g. sensors), controlled
variables c (environmental quantities that the software
controls through output devices, e.g. actuators), input
variables i (data items that the software needs as in-
put), and output variables o (quantities that the soft-
ware produces as output). These four variables are il-
lustrated in Figure 1 together with a train control soft-
ware as an example.
Software-to-be
Environment
Input devices
(e.g. sensors)
Output devices
(e.g. actuators)
Monitored variables
(e.g. train speed)
Input data
(e.g. measured
speed)
Controlled variables
(e.g. doorsClosed)
Output results
(e.g. doorsState)
Figure 1: Four-variable model as illustrated in (van Lam-
sweerde, 2009).
In case of the train control software, the physical
speed of the train is the monitored variable and the
measured speed is the input variable. The differentia-
tion is important because these two variables might be
different. Consider, for example, aquaplaning. In this
Ulfat-Bunyadi, N., Meis, R. and Heisel, M.
The Six-Variable Model - Context Modelling Enabling Systematic Reuse of Control Software.
DOI: 10.5220/0005944100150026
In Proceedings of the 11th Inter national Joint Conference on Software Technologies (ICSOFT 2016) - Volume 2: ICSOFT-PT, pages 15-26
ISBN: 978-989-758-194-6
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
15
case, the measured speed of the train might be lower
than the actual speed of the train. The measured speed
might even be 0 km/h although the train is actually
still moving. The same holds for output variables and
controlled variables. The output variable ‘doorsState’
might be set to ‘closed’ but it could still happen that
not all train doors are actually closed. However, as
we will show in the following, documenting only four
variables is insufficient. There are actually six vari-
ables that need to be documented.
As an example, we consider Adaptive Cruise Con-
trol (ACC) software (Robert Bosch GmbH, 2003).
The main objective of the software is to maintain the
driver’s desired speed while keeping the safety dis-
tance to vehicles ahead. To identify vehicles ahead
that are driving on the same lane, the ACC soft-
ware needs to ‘know’ the speed, the distance, and
the lane of vehicles ahead. To gain this information,
the ACC software uses a long range radar sensor and
ESP (Electronic Stability Program) sensors. The long
range radar (LRR) detects vehicles ahead and pro-
vides information about their speed, distance, and lat-
eral offset. The ESP sensors measure wheel speed,
yaw rate, lateral acceleration, and steering wheel an-
gle of the ACC vehicle itself. The ACC software uses
all this data in the following way: Based on the data
from the ESP sensors, the ACC software calculates
the yaw rate corrected for offset. This value enables
the ACC software to predict the course of the ACC
vehicle. Based on the lateral offset of vehicles ahead
(provided by the LRR) and the predicted course of the
ACC vehicle, the ACC software calculates the course
offset of vehicles ahead. The course offset is the es-
timated relative position of the vehicle ahead. In this
way, the ACC software estimates whether a vehicle
ahead is driving on the same lane or not. Accord-
ing to the Four-Variable Model (Parnas and Madey,
1995), the input and monitored variables given in Ta-
ble 1 would be documented.
Table 1: Input and monitored variables for ACC example.
Sensor
Input variable Monitored
variable
LRR
speed, distance, lat-
eral offset of vehicles
ahead
speed, distance,
relative position
of vehicles ahead
ESP
wheel speed, yaw
rate, lateral accelera-
tion, steering wheel
angle of ACC vehicle
course of ACC
vehicle
In contrast to that, the variables that were actually
relevant (i.e. before making the decision to use the
long range radar and the ESP sensors) are: the speed,
the distance, and the lane of vehicles ahead as well as
the lane of the ACC vehicle. Yet, these are not doc-
umented. This situation results in problems when the
ACC software shall later on be reused in another set-
ting. Imagine that the ACC software shall later on
be reused in the next car generation. However, in
the next generation, the ACC vehicle is additionally
equipped with a stereo video sensor which provides
precise information about the lane of vehicles ahead
and the lane of the ACC vehicle. Having documented
only the information given in Table 1, it is quite hard
for developers to decide which input and monitored
variables are still necessary and which ones are not.
In summary, the context of the software-to-be is
not completely predefined or given. Developers make
contextual decisions and thereby define the context
step by step. Existing approaches (like the Four-
Variable Model (Parnas and Madey, 1995) but also
others; see Section 5) only call for documenting the
variables that are relevant after decision-making, i.e.
the classical four variables. None of the approaches
calls for documenting the contextual decisions that
are made (together with the options that were se-
lectable) and the variables that have been relevant be-
fore decision-making. In this paper, we suggest a
context modelling method that ensures the documen-
tation of all this information. Our method is based
on an extended version of the Four-Variable Model
which we call the Six-Variable Model.
The paper is structured as follows. In Section 2,
we present some fundamental concepts that provide
the basis for our work. In Section 3, we introduce
our Six-Variable Model. Section 4 contains a descrip-
tion of our context modelling method which is based
on the Six-Variable Model and combines existing ap-
proaches. We discuss related work in Section 5 and
finally conclude our paper in Section 6.
2 FUNDAMENTALS
We use the terminology defined by Zave and Jackson
(Zave and Jackson, 1997) and differentiate between
system, machine, and environment. A system consists
of manual and automatic components. The machine is
the computer-based artefact of the system that is the
target of software development. The environment is
a portion of the real world that is becoming the en-
vironment of the development project because its cur-
rent behaviour is unsatisfactory in some way. The ma-
chine will be inserted into the environment so that the
behaviour of the environment becomes satisfactory.
There are indicative and optative statements about
ICSOFT-PT 2016 - 11th International Conference on Software Paradigm Trends
16

the environment. Indicative statements describe the
environment as it is without or in spite of the ma-
chine. Optative statements describe the environment
as we would like it to be because of the machine.
Based on this differentiation, requirements, domain
knowledge, and specification are defined as follows.
A requirement is an optative statement, intended to
express the desires of the customer concerning the
software development project. Domain knowledge or
domain assumptions represent indicative statements
intended to be relevant to the software development
project. The specification is an optative statement, in-
tended to be directly implementable and to support
satisfaction of the requirements. The relation between
the set of requirements (R), the set of domain knowl-
edge/assumptions (K), and the set of specifications
(S) is defined by means of the satisfaction argument
given in Equation 1.
S, K ` R (1)
The satisfaction argument says that if a machine is
developed that satisfies S and is inserted into the en-
vironment as described by K, then the set of require-
ments R is satisfied.
3 OUR SIX-VARIABLE MODEL
We first describe how we derived the Six-Variable
Model based on the Four-Variable Model (see Section
3.1). Then, we explain the notation that might be used
to document the six variables (see Section 3.2). Fi-
nally, we introduce four so called domain knowledge
frames that can be used to make assumptions that are
implicit in the Six-Variable Model explicit (see Sec-
tion 3.3).
3.1 Derivation of the Model
As explained above, Parnas and Madey (Parnas and
Madey, 1995) define not only the four variables (mon-
itored, controlled, input, and output) but also the fol-
lowing mathematical relations between them:
• NAT: indicative relation between m and c
• REQ: optative relation between m and c
• IN: indicative relation between m and i
• OUT: indicative relation between o and c
• SOF: optative relation between i and o
On the one hand, the environment (i.e. nature and
previously installed systems) places constraints on
the values of the environmental quantities m and c.
These are described by NAT. On the other hand,
the software-to-be is expected to impose further con-
straints on them. These are described by REQ. IN de-
scribes how sensors translate m to i. OUT describes
how actuators translate o to c. SOF, finally, describes
how the software-to-be will/shall produce its output o
from the input i.
As explained in the introduction, we argue that
documenting only the classical four variables is in-
sufficient. The four variables result from the decision
which sensors/actuators/other systems to use for mon-
itoring/controlling quantities in the environment. The
quantities that were originally relevant in the require-
ment are often different than the ones that are finally
monitored/controlled. In the ACC example, the lane,
speed, and distance of vehicles ahead as well as the
lane of the ACC vehicle were environmental quan-
tities that were originally relevant. Yet, due to the
decision to use a long range radar and ESP sensors
for monitoring, other environmental quantities were
monitored: the relative position, speed, and distance
of vehicles ahead as well as the course of the ACC ve-
hicle. Therefore, we extend the Four-Variable Model
with the following two variables:
• referenced variable r: environmental quantities
that should originally be observed/monitored and
were therefore referenced in the requirement
• desired variable d: environmental quantities that
should originally be influenced and that shall be
as desired by the requirement
The introduction of the two new variables necessitates
that the following mathematical relations between the
variables are described as well:
• IN
RW
: indicative relation between r and m
• OU T
RW
: indicative relation between c and d
• NAT
RW
: indicative relation between r and d
• REQ
RW
: optative relation between r and d
IN
RW
describes how a referenced variable is related to
a monitored one (e.g. how lane of vehicles ahead is
related to relative position of vehicles ahead). Note
that there does not necessarily need to be a 1-to-1
mapping between the variables. Actually, lane of ve-
hicles ahead is not only related to relative position of
vehicles ahead but also to course of the ACC vehicle,
since both are used to estimate the lane of vehicles
ahead. So, there may be a 1-to-n, n-to-1, n-to-m map-
ping between r and m variables. Similarly, OUT
RW
describes how controlled variables are related to de-
sired variables. Beyond that, there is an indicative
and an optative relation between the newly introduced
r and d variables. These are documented by means of
the relations NAT
RW
and REQ
RW
. We will explain
these relations later on in more detail.
The Six-Variable Model - Context Modelling Enabling Systematic Reuse of Control Software
17
3.2 Documentation of the Six Variables
For documenting the six variables, Jackson’s prob-
lem diagrams (Jackson, 2001) are well suited. Jack-
son differentiates between the world (i.e. the environ-
ment) and the machine (i.e. the software-to-be). The
software development problem to be solved is in the
real world, the environment. The machine is inserted
into this environment to solve the problem. In prob-
lem diagrams, the machine and its connection to the
problem/requirement in the real world can be mod-
elled in terms of so called problem domains that are
in between. The six variables can also be made ex-
plicit: they can be documented as phenomena at the
different types of connections between the domains.
We first introduce the notation and then explain the
documentation of the six variables in more detail.
According to Jackson’s method (Jackson, 2001),
first, a context diagram is created showing the ma-
chine in its environment. Then, the overall software
development problem is decomposed into subprob-
lems, and each subproblem is documented in a prob-
lem diagram. As a support in creating problem di-
agrams, Jackson provides so called problem frames,
which are patterns of recurring software development
problems. They are intended to be used when decom-
posing software development problems by instantiat-
ing them.
A context diagram consists of the following mod-
elling elements: the machine domain (representing
the software-to-be), usually several problem domains
(representing any material or immaterial object in the
environment, e.g. people, other systems, a physical
representation of data), and interfaces (of shared phe-
nomena, e.g. events, states, values) connecting the
machine domain and problem domains. At the inter-
face, not only the phenomena are annotated but also
the abbreviation of the domain controlling the phe-
nomena followed by an exclamation mark (e.g. M!).
The other domain that participates in the interface ob-
serves these phenomena. An example of a context
diagram is given in Figure 11.
Additionally to the elements of a context diagram,
a problem diagram contains a requirement, a con-
straining reference, and optionally one or more re-
quirement references. A requirement reference con-
nects the requirement and a problem domain express-
ing that the requirement refers somehow to the do-
main phenomena. A constraining reference connects
also the requirement and a problem domain, but ex-
presses that the requirement not only refers to but
even constrains the domain phenomena. An example
of a problem diagram is given in Figure 12.
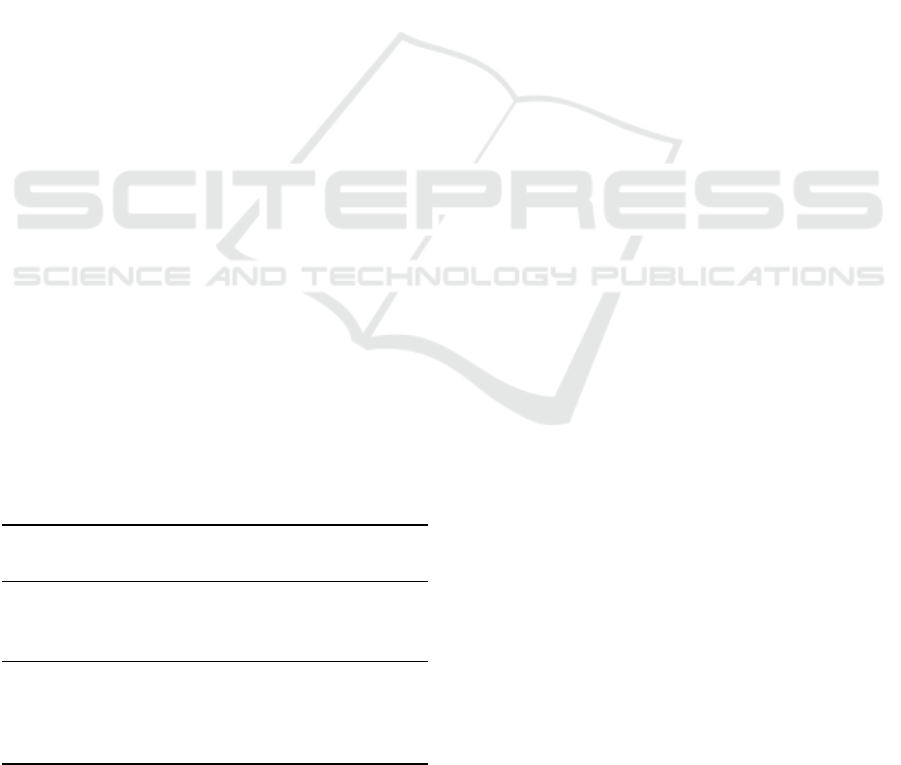
In Figure 2, we have depicted the Six-Variable
Model itself as a problem diagram. The software-
to-be is the control machine. Sensors and actuators
are used by the machine to monitor/control the envi-
ronmental domains W and Z. Jackson calls the sen-
sors and actuators connection domains. A connec-
tion domain is a domain that is interposed between
the machine and a problem domain (Jackson, 2001).
There are reliable and unreliable connection domains.
According to Jackson, they shall only be modelled
if they are unreliable. If they are reliable, they can
be omitted in the problem diagram. As regards our
Six-Variable Model, note that there are maybe sev-
eral connection domains (i.e. a chain of sensors or a
chain of actuators) between the machine and the en-
vironment, especially in embedded systems. For an
example, consider again the ACC system described
above. The driver may press the brake pedal to de-
activate ACC. Yet the brake pedal is not directly con-
nected to the ACC. The brake pedal is connected to
two sensors: a travel sensor and a pressure sensor to
measure the speed and force of the driver’s command.
These sensors are connected to the ESP and the ESP
is connected to the ACC. The existence of connection
domains means that there are not only six variables to
be documented but even 4 + n variables. However, the
method we present in this paper is already designed to
consider the case that there may be more connection
domains (see Section 4).
Control
machine
Environmental
domain W
Require-
ment
Environmental
domain Z
SE!i
CM!o
Sensors
EW!m
EW!r
Actuators
EZ!d
AC!c
Legend:
r: variables originally referenced by the requirement
d: variables that shall be as desired by the requirement
m: variables actually monitored by sensors
c: variables actually controlled by actuators
i: input variables
o: output variables
Sensors/actuators/other
systems connecting
software-to-be to real world
Requirement
in real world
Software-to-be
Remote problem
domains
in real world
Figure 2: Our Six-Variable Model.
The mathematical relations between the six variables
are depicted in Figure 3. We have renamed the re-
quirement to be satisfied in the real world as RW-
Req. Furthermore, we added two requirements: Sof-
Req (the set of software requirements) and Sys-Req
(the set of system requirements). Sof-Req is actu-
ally the specification SOF expressing how i is trans-
formed into o. The system consists of the software
(the machine) and the sensors and actuators. There-
fore, Sys-Req represents the set of system require-
ments and refers to m while constraining c. RW-Req
ICSOFT-PT 2016 - 11th International Conference on Software Paradigm Trends
18
refers to r and constrains d. SOF, REQ, and REQ
RW
are optative. The corresponding indicative relations
between m and c as well as r and d are described by
NAT and NAT
RW
. Further indicative relations are IN,
IN
RW
, OUT, and OUT
RW
.
Sensors/actuators/other
systems
Requirement
in real world
Software-to-be
Remote problem
domains in real world
i
o
m
c
r
m
d
Control
machine
Environmental
domain W
Environmental
domain Z
i
o
Sensors
Actuators
c
IN
OUT
IN
RW
OUT
RW
Sof-Req
= SOF
Sys-Req
= REQ
NAT
NAT
RW
RW-Req
= REQ
RW
Figure 3: Relations among six variables.
3.3 Assumptions in the Six-Variable
Model
According to Parnas and Madey, IN and OUT are
indicative relations (Parnas and Madey, 1995). Yet,
in our opinion, IN and OUT as well as IN
RW
and
OUT
RW
can also be considered to be optative. We
want these relations to be true, but they are not really
facts. Rather, they are assumptions. Van Lamsweerde
(van Lamsweerde, 2009) makes an interesting differ-
entiation. He considers three types of domain knowl-
edge: domain properties, domain hypotheses, and ex-
pectations. Domain properties are descriptive state-
ments about the environment and are facts (e.g. phys-
ical laws). Domain hypotheses are also descriptive
statements about the environment, but are assump-
tions. Expectations are also assumptions, but they are
prescriptive statements to be satisfied by environmen-
tal agents like persons, sensors, actuators. We adopt
van Lamsweerde’s three types of domain knowledge
and suggest four domain knowledge frames which
can be used to make the expectations and domain hy-
potheses in the Six-Variable Model explicit. The do-
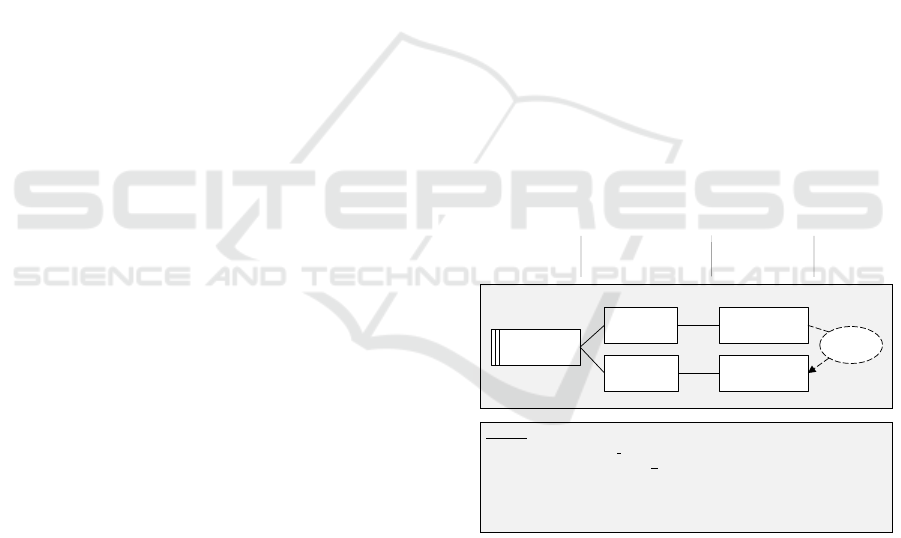
main knowledge frames are given in Figure 4. Each
frame can be instantiated to create the corresponding
domain knowledge diagram. Domain knowledge di-
agrams have already been introduced in (Alebrahim
et al., 2014). However, the four domain knowledge
frames we present here are new. The benefit of mak-
ing domain hypotheses and expectations explicit is
that (i) the developers of the machine become aware
of them and (ii) the expectations can be discussed
with the developers or providers of these sensors, ac-
tuators, and other systems and, thus, be reviewed by
them.
Environmental
domain Z
Actuator
AC!c
Exp: d is
actually
achieved by
c
EZ!d
AC!c
Frame 4
Environmental
domain W
DH: m
actually
reflects r
EW!r
EW!m
Environmental
domain W
Sensors
EW!m
Exp: i
actually
corresponds
to m
SE!i EW!m
Control
machine
CM!o
Actuator
Exp: o
actually
results in c
CM!o AC!c
Frame 1
Frame 2
Frame 3
Figure 4: Domain knowledge frames.
Frame 1 in Figure 4 expresses that there is a domain
hypothesis about the domain W which says that m ac-
tually reflects r. This is a domain hypothesis made
by us (as the developers of the machine). Frame 2
expresses that there is an expectation to be satisfied
by the sensor domain. The sensor domain has to en-
sure that i actually corresponds to m. Frame 3 ex-
presses that there is an expectation to be satisfied by
the actuator domain. The actuator domain has to en-
sure that o actually results in c. Finally, frame 4 ex-
presses that there is an expectation to be satisfied by
the controlled domain Z. Domain Z is responsible for
ensuring that d is actually achieved by c. Note that we
have a domain hypothesis in Frame 1 while Frames 2
to 4 present expectations. All four statements are as-
sumptions. Yet, the difference lies in the prescriptive
and descriptive character of the statements. In Frames
2 to 4, we make prescriptions for certain domains: for
the sensor (Frame 2), the actuator (Frame 3), and the
controlled domain (Frame 4). They are responsible
for coming up to our expectations. Yet, in Frame 1,
we cannot make domain W responsible for satisfy-
ing our assumption. It is rather a hypothesis we make
which needs to hold.
4 CONTEXT MODELLING
In this section, we present a method that is based on
the Six-Variable Model and supports developers in
documenting not only the six variables but also the
contextual decisions that are made as well as the op-
tions that were selectable. We explain the techniques
we use and the reason why we chose them in Section
4.1. Afterwards, we present the method steps in Sec-
tion 4.2. The application example is described in Sec-
tion 4.3. Finally, we explain the benefit of the created
models in Section 4.4.
The Six-Variable Model - Context Modelling Enabling Systematic Reuse of Control Software
19

4.1 Used Techniques
Problem Diagrams. As described in Section 3, prob-
lem diagrams (Jackson, 2001) are well suited for
modelling the six variables, since they show the re-
quirement, the remote problem domains, the connec-
tion domains, and the machine domain in one diagram
together with the shared phenomena. Yet, develop-
ers need guidance in documenting the ‘right’ six vari-
ables therein and not other phenomena. We provide
this guidance in our method (see Section 4.2). Al-
though we use problem diagrams, we do not proceed
in the way suggested by Jackson during problem de-
composition. Our method proceeds in another way.
For creating the problem diagrams, we used the
UML4PF tool (Cote et al., 2011). The benefit of us-
ing this tool is that different other analyses can be per-
formed on the models that are created with this tool.
In UML4PF, problem diagrams are shown as UML
class diagrams with corresponding stereotypes to ex-
press the semantics of problem diagram model ele-
ments. For more details regarding the mapping of the
notations, see (Cote et al., 2011).
Differentiating between Essence and Incarnation.
The differentiation between essence and incarnation
of a system was introduced 1984 by McMenamin and
Palmer (McMenamin and Palmer, 1984). The essence
comprises the capabilities that a system must pos-
sess to fulfil its purpose, regardless of how the sys-
tem is implemented. The incarnation comprises all
implementation details. A heuristic for identifying
the essence of a system is the assumption of perfect
technology, i.e. the assumption that the technology
within the system is perfect, i.e. processors are, for
example, able to do anything constantly and contain-
ers are able to hold an infinite amount of data. We
use the differentiation between essence and incarna-
tion in our method too. Yet, to identify the essence,
we assume that the technology outside the machine
is perfect. This means, for example, that connec-
tion domains like sensors and actuators are consid-
ered to be reliable and are therefore not shown in the
corresponding context/problem diagram. To consider
the incarnation, the assumption of perfect machine-
external technology is then given up.
OVM and Selection Model. To document con-
textual decisions and options/alternatives, we use the
OVM (Orthogonal Variability Model) (Pohl, 2010).
The OVM was originally developed to capture the
variation points and variants of a product line together
with their variability dependencies (mandatory, op-
tional, alternative choice) as well as constraint depen-
dencies (requires, excludes). The variants can be re-
lated to a development artefact like a requirement or
a diagram (or a part of it) by means of so called arte-
fact dependencies. The artefact (or the part of it) is
then defined as being variable. For documenting the
choices that are made, a selection model is created.
We use the OVM to document the contextual deci-
sions to be made, the options/alternatives that are se-
lectable, and dependencies among them. By means
of artefact dependencies, we relate the alternatives
to variable elements of the AND/OR graph (see next
section). To document the choices, we also use a se-
lection model. The strength of the OVM and the main
reason for choosing this approach over others is that
one is able to relate a variant to an entire model, a
model element, or even certain sections of a model.
AND/OR Graph. For documenting the refine-
ment/decomposition of requirements, we use an
AND/OR graph (which is similar to the AND/OR
goal graph described in (Pohl, 2010)). The AND/OR
graph is a directed, acyclic graph with nodes that rep-
resent requirements and edges that represent AND-
decomposition relationships and OR-decomposition
relationships between the requirements. A decom-
position of a requirement R into a set of subrequire-
ments R
1
,..., R
n
is an AND-decomposition iff all sub-
requirements must be satisfied to satisfy the require-
ment R. A decomposition of a requirement R into a set
of subrequirements R
1
,..., R
n
is an OR-decomposition
iff satisfying one of the subrequirements is sufficient
for satisfying the requirement R. What needs to be
documented in addition to the AND/OR graph, is the
reasoning why each AND/OR-decomposition is suf-
ficient. We suggest documenting this information at
least informally in natural language.
4.2 Method Steps
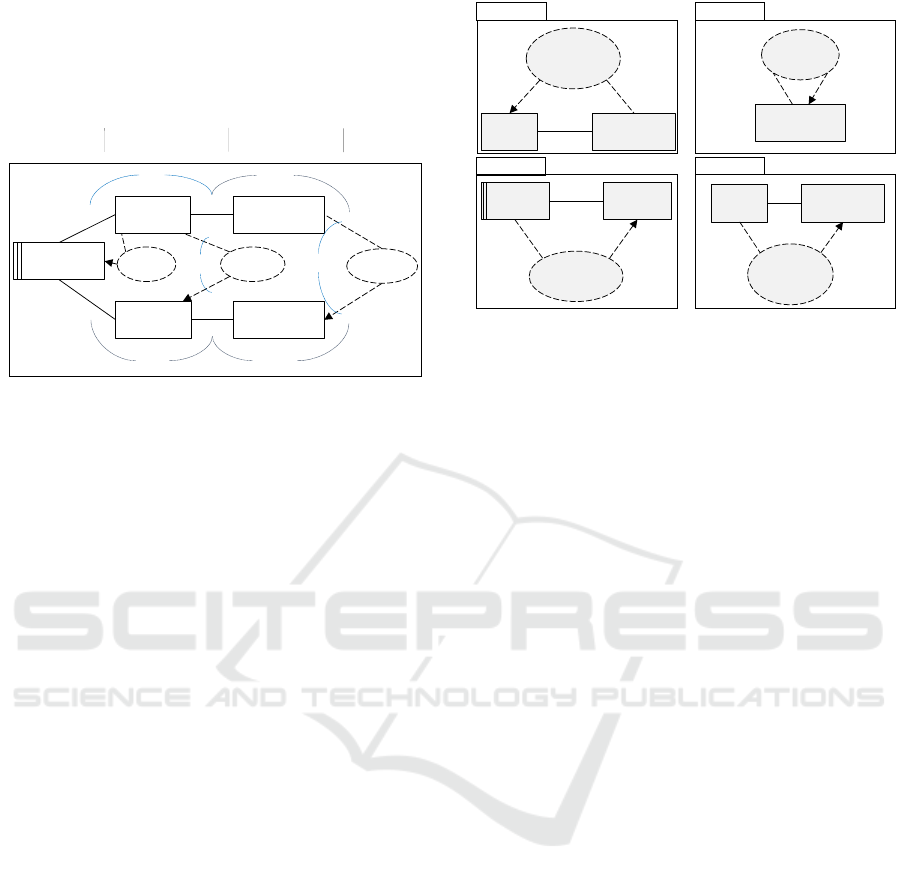
Figure 5 provides an overview of the method steps as
well as the input and output of each step.
Step 1: Create an essential context diagram. As
a first step, the remote problem domains are identi-
fied and a context diagram showing the machine do-
main, the remote problem domains, and the interface
between them with the r and d variables is created
(see Figure 6). The context diagram is essential, since
we assume that the connection domains are all reli-
able and, thus, abstract from them. As input to Step
1, knowledge about the machine and its environment
is needed.
Step 2: Create essential problem diagrams. Dur-
ing this step, the overall problem/requirement is de-
composed/refined and, for each requirement, an es-
sential problem diagram is created. The informa-
tion to be documented in an essential problem dia-
gram is given in Figure 7. An essential problem dia-
ICSOFT-PT 2016 - 11th International Conference on Software Paradigm Trends
20
external
input
method
steps
input
/
output
Step 1:
Create essential
context diagram
Step 2:
Create essential
problem diagrams
Step 3:
Create incarnation
problem diagrams
Step 4:
Select alternatives and
derive concrete model
Step 5: Make
expectations and domain
hypotheses explicit
Essential
context
diagram
AND/OR graph
with all
alternatives
Reasonings
Selection
model
Domain
knowledge
diagrams
Essential
problem
diagrams
OVM
Incarnation
problem
diagrams
Derived AND/OR
graph with
selected alternatives
Domain
knowledge frames
Domain
expertise
Six-Variable
Model
Figure 5: Overview of our context modelling method.
Control
machine
Remote
domains
r, d
Figure 6: Information to be documented in an essential con-
text diagram.
gram shows the machine (or more precisely the sub-
machine), the remote problem domains, the require-
ment, interfaces between machine and remote prob-
lem domains annotated with r and d variables as well
as requirement references and constraining references
annotated with r and d variables. Through the re-
finement/decomposition of the requirement, the prob-
lem domains that were shown in the context diagram
may also be decomposed into several ones. So it
may be the case that the problem diagrams contain
the decomposed problem domains. This is allowed
as long it is ensured that all problem domains shown
in the problem diagrams are either shown as well in
the context diagram or represent parts of the problem
domains shown therein. The decomposition of the
overall problem/requirement may be done in several
steps, if necessary. The decomposition relationships
of the problems/requirements are documented as an
AND/OR graph. For each AND/OR decomposition
of a requirement, the reasoning why the decomposi-
tion is sufficient is documented too.
Control
machine
Remote
domains
REQ
RW
r, d
r, d
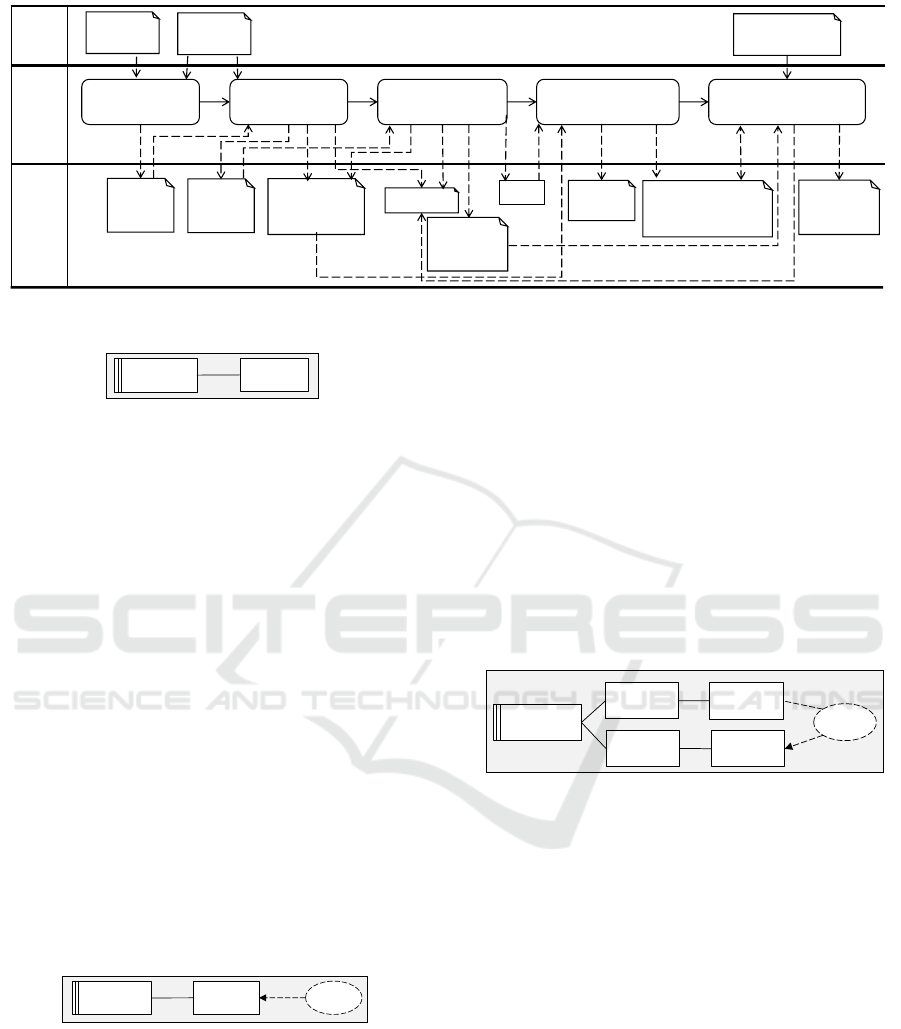
Figure 7: Information to be documented in an essential
problem diagram.
Step 3: Create Incarnation Problem Diagrams.
For each essential problem diagram from Step 2, con-
nection domains (if existent) are added and thus in-
carnation problem diagrams are created. If there
are different options/alternatives for using certain
sensors/actuators (i.e. connection domains), create
separate incarnation problem diagrams for each op-
tion/alternative. Figure 8 shows which information
needs to be documented in an incarnation problem di-
agram. The main difference is that sensors and ac-
tuators are considered and, thus, the m, c, i, o vari-
ables are introduced. If there are options/alternatives,
a decision point with the corresponding alternatives
is also created in an OVM. Due to the new require-
ment decompositions, the AND/OR graph from Step
2 needs to be extended and corresponding reasonings
need to be created. The decision points and alter-
natives in the OVM are related to the corresponding
variable elements of the AND/OR graph by means of
artefact dependencies.
Control
machine
Monitored
remote
domains
REQ
RW
i
o
Sensors
m
r
Actuators
c
Controlled
remote
domains
d
Figure 8: Information to be documented in an incarnation
problem diagram.
Step 4: Select Alternatives and Derive Concrete
Model. For each decision point in the OVM, one or
(if possible and appropriate) several alternatives are
selected. The choices are documented in a selec-
tion model. Based on the selection model, a concrete
model of the requirement decomposition is derived
from the AND/OR graph .
Step 5: Make Expectations and Domain Hypothe-
ses Explicit. To each incarnation problem diagram
that has been selected in Step 4, the four domain
knowledge frames (introduced in Section 3) are ap-
plied to make the domain hypotheses and expec-
tations explicit in separate domain knowledge dia-
grams. This results in a decomposition of the require-
ment from the incarnation problem diagram. We illus-
trate this in Figure 9. If the domain hypothesis DH is
valid, the expectations Exp-Se, Exp-Ac, and Exp-CD
are satisfied (by the sensors, actuators, and controlled
The Six-Variable Model - Context Modelling Enabling Systematic Reuse of Control Software
21
domains), and the machine satisfies its software re-
quirement Sof-Req, then the real world requirement
REQ
RW
is satisfied (see satisfaction argument in Fig-
ure 9). The derived AND/OR graph from Step 4 is
extended with the requirement decompositions made
in this step. Thus, the satisfaction argument is also
reflected in the AND/OR graph. The reasoning for
these decompositions need to be documented as well.
DH: m
actually
reflects r
r
m
Control
machine
Monitored
remote
domains
REQ
RW
i
o
Sensors
m
r
Actuators
c
Controlled
remote
domains
d
Exp-Se: i
actually
corresponds
to m
i
m
Exp-Ac: o
actually
results in c
o
c
Exp-CD: d is
actually
achieved by c
c
d
Sof-Req:
produce o
from i
o
i
Satisfaction argument: DH, Exp-Se, Sof-Req, Exp-Ac, Exp-CD ├ REQ
RW
Figure 9: Progression towards the machine.
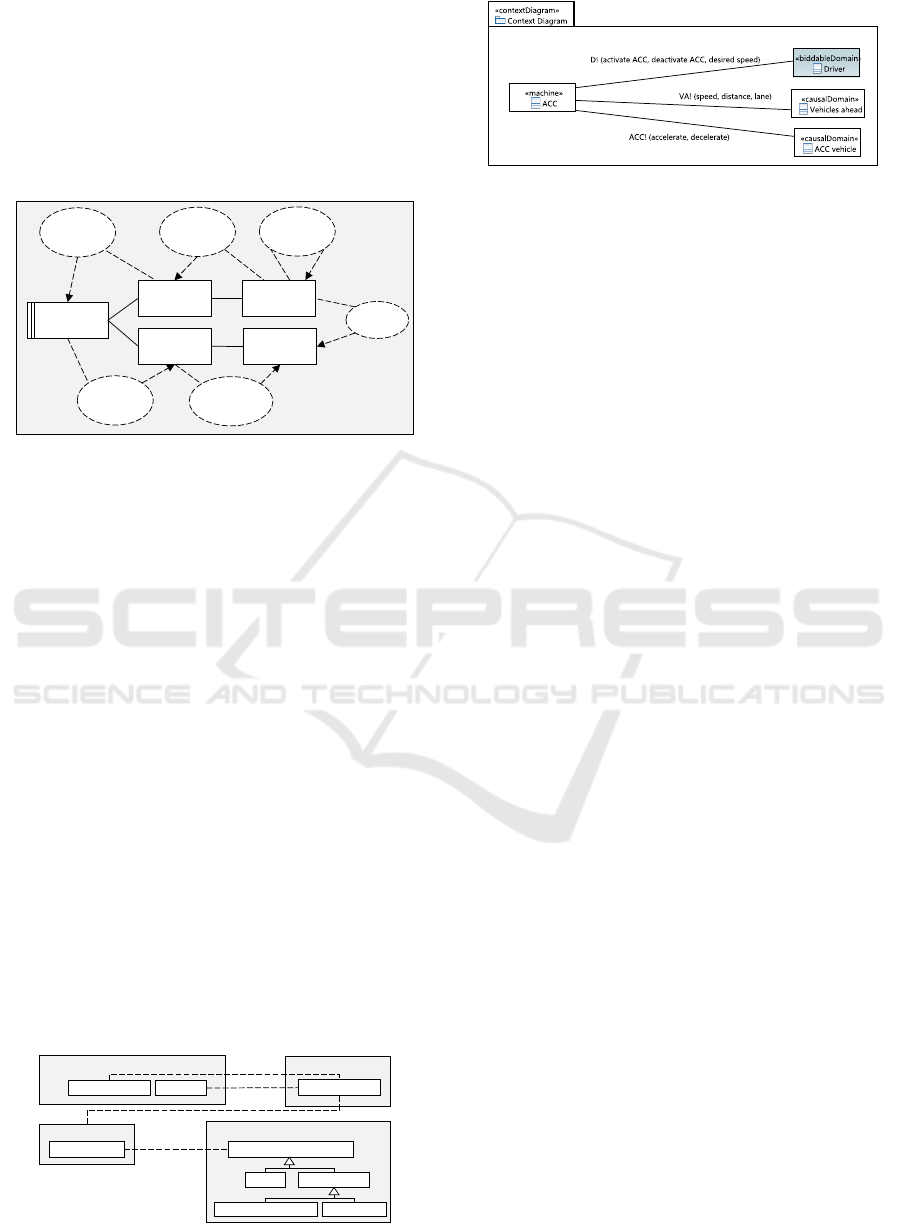
The application of the method results in a number
of models that are related to each other. The inter-
model relationships are depicted in Figure 10. Note
that only those concepts of the models are shown that
need to be related to each other. The relationships
between the OVM/selection model and the AND/OR
graph need to be documented as artefact dependen-
cies. The relationships between requirements in the
two AND/OR graphs (the one containing all alterna-
tives/options as well as the one containing only the
selected alternatives/options) and the requirements in
the problem diagrams need to be documented as well
by means of traceability relationships. The same
holds for the relationships between the domain hy-
potheses and expectations (both representing domain
knowledge) in the domain knowledge diagrams and
the problem diagrams to which they contribute.
4.3 Application to Real Example
We applied our method to a real example: the ACC
described in (Robert Bosch GmbH, 2003). Due to
Domain knowledge diagram
Problem diagram
OVM / Selection model
AND/OR graph
Variation point Variant
Requirement
Requirement Domain knowledge
◄ relates to
◄ relates to
◄ relates to
requires
satisfaction of ►
Domain hypothesis
Expectation
Fact Assumption
Figure 10: Inter-model relationships.
Figure 11: Essential context diagram for ACC example.
space limitations, we are not able to describe the en-
tire example here and show only excerpts.
Step 1: Create an Essential Context Diagram. An
essential context diagram for the ACC example is
given in Figure 11. It shows three remote problem
domains in the real world: the driver, vehicles ahead,
and the ACC vehicle. Since we abstract from con-
nection domains, the ACC machine is directly con-
nected to these problem domains. The interfaces are
annotated with the environmental quantities of these
problem domains that we are interested (the r and d
variables).
Step 2: Create Essential Problem Diagrams.
The overall requirement R-0: “Maintain desired
speed keeping safety distance to vehicles ahead.” is
decomposed into the following requirements:
R-1: Enable driver to activate ACC.
R-2: Enable driver to enter desired speed.
R-3: Identify vehicles ahead for tracking.
R-4: Adapt speed to desired speed keeping safety
distance to vehicles ahead.
R-5: Display recorded desired speed to driver.
R-6: Enable driver to deactivate ACC.
The following reasoning explains why this decompo-
sition is sufficient:
The decomposition into R-1 to R-6 is sufficient
because: R-1 ensures that the ACC machine
enters the “activated” state while R-6 ensures
that the ACC machine leaves this state. In the
“activated” state, the machine is able to sat-
isfy R-2 to R-5 as follows. R-2 ensures that
the driver may enter a new desired speed if he
wants to. Otherwise, the ACC machine uses
the currently stored desired speed. R-3 en-
sures that the ACC machine detects vehicles
ahead driving on the same lane. R-4 ensures
that the ACC machine not only drives at the
desired speed but adapts the speed, if it detects
vehicles ahead. R-5 ensures that the driver is
always informed about the desired speed that
is currently stored and used by the ACC ma-
chine.
ICSOFT-PT 2016 - 11th International Conference on Software Paradigm Trends
22
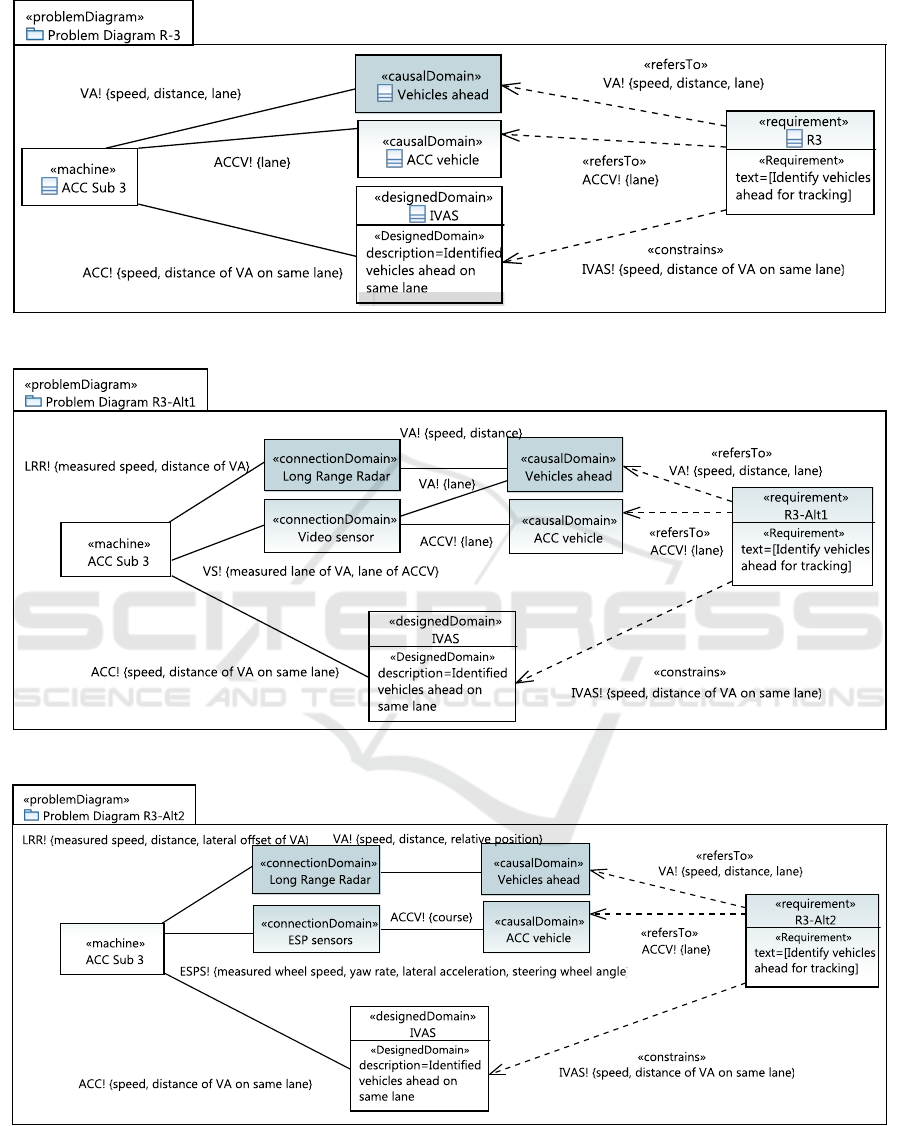
Figure 12: Essential problem diagram for R-3.
Figure 13: Incarnation problem diagram for R3-Alt1.
Figure 14: Incarnation problem diagram for R3-Alt2.
The essential problem diagram for R-3 is shown in
Figure 12. One peculiarity in Figure 12 is that we
introduced a designed domain called IVAS (identified
vehicles ahead on same lane). IVAS is a so called
The Six-Variable Model - Context Modelling Enabling Systematic Reuse of Control Software
23
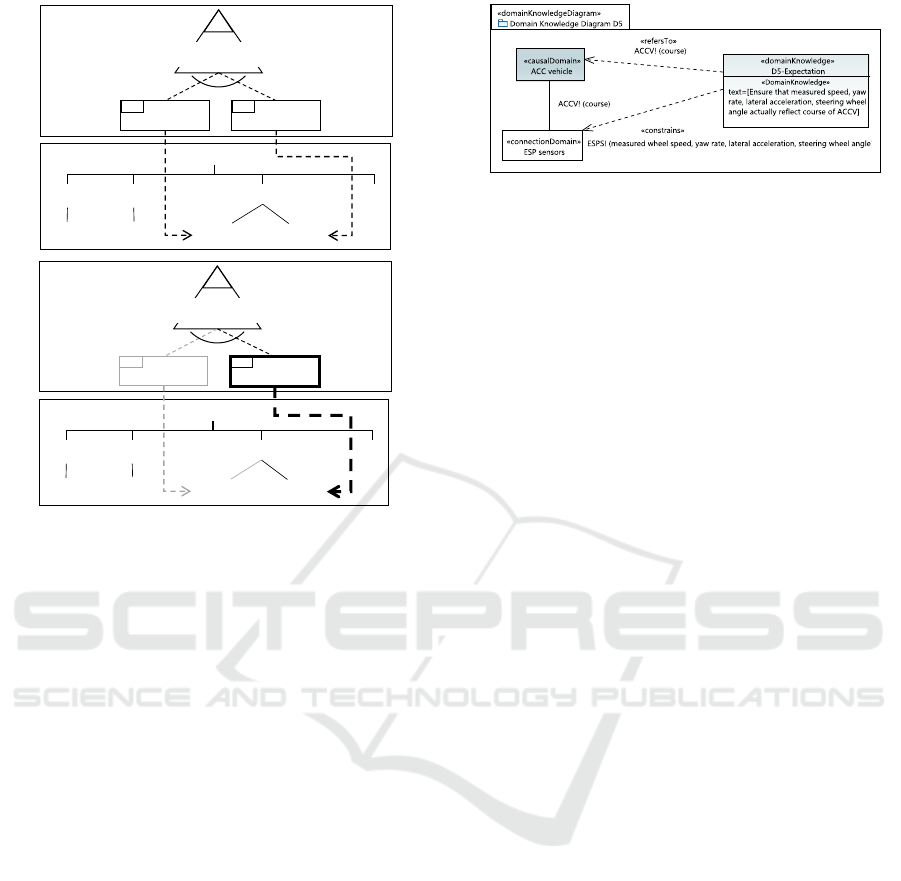
Identifying lane of
vehicles ahead
VPVP
V
Estimating
the lane
V
Using a
video sensor
OVM
AND/OR graph
R-0
R-1 R-2
R-3 …
R3-Alt1
R3-Alt2
[1…1]
R1-Alt1
R2-Alt1
Identifying lane of
vehicles ahead
VPVP
V
Estimating
the lane
V
Using a
video sensor
Selection model
AND/OR graph
R-0
R-1 R-2
R-3 …
R3-Alt1
R3-Alt2
[1…1]
R1-Alt1
R2-Alt1
Figure 15: Part of the OVM for the ACC Software.
designed domain, i.e. it is actually part of the machine
ACC Sub 3. Based on the information ACC Sub 3
gets, it decides whether detected vehicles ahead are
on the same lane or not. The ones that are on the
same lane are stored by ACC Sub 3.
Step 3: Create Incarnation Problem Diagrams.
Examples of incarnation problem diagrams are given
in Figures 13 and 14. These are two possible incar-
nations for the essential requirement R-3 (shown in
Figure 12). Alternative 2 represents the ACC system
as described in the introduction using ESP sensors
and the long range radar to identify vehicles ahead
for tracking. In Alternative 1, in contrast, the long
range radar is used together with a stereo video sen-
sor for the same purpose. In case of Alternative 1, the
lane of vehicles ahead is identified precisely, while it
is only estimated in case of Alternative 2. The r and
d variables (at the requirement reference and the con-
straining reference) in Figure 13 and Figure 14 are the
same, while the m, i, c, o variables at the interfaces are
different.
Step 4: Select Alternatives and Derive Concrete
Model. Figure 15 depicts an excerpt of the OVM with
the artefact dependencies (shown as dashed arrows) to
the AND/OR graph as well as a selection model and
the derived AND/OR graph. In the selection model
and the derived AND/OR graph, the alternatives that
are not selected are shown in grey (R3-Alt1) while the
selections are emphasized (R3-Alt2).
Step 5: Make Expectations and Domain Hypothe-
Figure 16: Example of a domain knowledge diagram.
ses Explicit. An example of a domain knowledge di-
agram (created by instantiating Frame 2) is given in
Figure 16. It shows the expectation we, as developers
of the ACC software have, regarding the ESP sensors
shown in Figure 14. This expectation is to be satisfied
by developers of the ESP sensors. We expect that the
wheel speed, yaw rate, lateral acceleration, and steer-
ing wheel angle measured by the ESP sensors actually
reflect the course of the ACC vehicle. Therefore, the
ESP sensors are constrained in the domain knowledge
diagram in Figure 16, while the ACC vehicle is refer-
enced.
4.4 Benefit
The documentation that is created when applying our
method enables developers to analyse the impact of
contextual changes systematically and to integrate
changes in a consistent manner. For example, if the
ACC software shall actually be reused in another ve-
hicle that is additionally equipped with a video sensor,
the developers can see in the documentation what the
current r is in the problem diagram for R-3 (identi-
fying vehicles ahead) and how it is realized (m and
i). In the OVM, they can even see that there was a
decision point regarding lane identification and that
a video sensor was even considered as an alternative.
As another example consider the case in which other
developers tell us that they are not able to provide the
input variable i we expected from them but a slightly
different one. Based on the documentation, we are
able to trace back to which r this variable contributed
and whether there are other alternatives to achieve r.
5 RELATED WORK
Jackson discusses the Four-Variable Model in his
book (Jackson, 2001) as well. He depicts the Four-
Variable Model as a problem diagram which is shown
in Figure 17. The machine is a control machine which
uses sensors and actuators to monitor/control the en-
vironment. The four variables are annotated at the in-
terfaces between machine, sensors/actuators, and en-
ICSOFT-PT 2016 - 11th International Conference on Software Paradigm Trends
24

vironment. The constraining reference (which is at
the same time also a requirement reference) is anno-
tated with the m and c variables which means that the
requirement REQ refers to the variable m and con-
strains the variable c of the environment.
Control
machine
Actuators
Sensors
SE!i
CM!o
Environment
EN!m
AC!c
REQ
m,c
Figure 17: Four Variable Model as problem diagram. (Jack-
son, 2001).
Jackson is of the opinion that the quantities at the
constraining reference are m and c, i.e. they repre-
sent the same quantities as the ones that are moni-
tored/controlled by the sensors/actuators (annotated at
the interface between sensors/actuators and environ-
ment). This is different to our Six-Variable model. As
we pointed out in Section 3, we think that the moni-
tored/controlled quantities are often different than the
ones mentioned in the requirement (the r and d vari-
ables).
Gunter et al. (Gunter et al., 2000) differentiate be-
tween four types of phenomena: e
h
are environmental
phenomena hidden from the system, e
v
are environ-
mental phenomena visible to the system, s
v
are sys-
tem phenomena visible to the environment, and s
h
are
system phenomena hidden from the environment. Ac-
cording to Gunter et al., e
v
correspond to the moni-
tored variables in the Four-Variable Model and s
v
to
the controlled variables. The s
h
phenomena contain
the input and output variables. However, according to
Gunter et al., there are no e
h
phenomena in the Four-
Variable Model. e
h
corresponds to the r and d vari-
ables in our Six-Variable Model. Yet, the benefit of
our method is that we differentiate between the r and
d variables and provide guidance in identifying them.
There are three further approaches that extend the
Four-Variable Model. Yet, their extensions focus on
the system and are directed towards the machine,
while our extension is directed towards the environ-
ment/real world (i.e. the opposite direction). Never-
theless, we explain them shortly. First, Bharadwaj and
Heitmeyer (Bharadwaj and Heitmeyer, 1999) suggest
to specify the required behaviour of the machine in
terms of the following three modules: an input device
interface module, a device-independent module, and
an output device interface module. The input device
interface module specifies how the input variables
provided by the sensors are to be used to compute
estimates of the monitored variables. The device-
independent module specifies how the estimated mon-
itored variables are to be used to compute estimates of
the controlled variables. The output device interface
module finally specifies how the estimates of the con-
trolled variables are used to compute the output vari-
ables that drive the actuators. Thus, the focus of this
approach is mainly on the machine and its input and
output variables. The second approach is the one of
Miller and Tribble (Miller and Tribble, 2001). They
propose an extension of the Four-Variable Model that
clarifies how system requirements can be allocated
between hardware and software. So the focus of their
extension is on the system while our extension is di-
rected towards the environment. The third approach is
the one of Patcas et al. (Patcas et al., 2013). They crit-
icise that the Four-Variable Model does not specify
the software requirements, but bounds them by speci-
fying the system requirements and the input and out-
put hardware interfaces of the system. It is the soft-
ware engineers task to develop a software that satis-
fies the system requirements and hardware interfac-
ing constraints. To ameliorate this situation, the au-
thors formalize the properties of acceptable system
and software implementations and provide a neces-
sary and sufficient condition for the existence of an
acceptable software implementation. Beyond that,
the authors provide a mathematical characterization
of the software requirements in terms of their weak-
est specification. Again, the focus of this work is on
the software/machine and its interfaces. Since the fo-
cus of these three approaches is on the system, they
can theoretically be combined with our Six-Variable
Model. We will analyse that in future work.
Another work that is related to our context mod-
elling method is van Lamsweerde’s goal-oriented re-
quirements engineering method (van Lamsweerde,
2009). He assumes Jackson’s model of the world
and the machine and suggests a goal-oriented method.
Multi-agent goals are refined (in AND-refinement
trees) until the subgoals can be assigned to single
agents in the environment (then they are expectations)
or to agents in the system (then they are require-
ments). Leaf nodes may also be domain hypotheses
or domain properties. For the system agents, agent
models are created. For expectations, no further mod-
els are created. Van Lamsweerde’s work has simi-
larities with our context modelling method, since we
use AND/OR graphs and his differentiation between
expectation and domain hypotheses. Yet, our con-
text modelling method is based on the Six-Variable
Model, i.e. we document the six variables, while he
documents only the classical four variables. Further-
more, he does not document contextual decisions and
the options that were selectable.
The Six-Variable Model - Context Modelling Enabling Systematic Reuse of Control Software
25

6 CONCLUSION AND FUTURE
WORK
Contextual decisions need to be documented because
they might change the environmental quantities that
are relevant for a software. After decision making,
another set of quantities is frequently relevant than
before. Without guidance, developers tend to docu-
ment only the environmental quantities that are rel-
evant after decision making (i.e. the classical four
variables). Yet, these quantities restrict R (the set of
requirements) unnecessarily to one possible context
although R actually allows many more contexts. Our
method supports the documentation of both, the envi-
ronmental quantities that are relevant before and after
decision making, namely the six variables. Further-
more, it ensures traceability of contextual decisions
that are made. This facilitates later reuse of the devel-
oped software.
In future work, we plan to apply our method to fur-
ther, more complex examples, also in other domains
(e.g. a patient monitoring system as part of ambient
assisted living in the health domain). We also con-
sider a comparative evaluation with student groups to
compare our Six-Variable Model with the approach
suggested by Gunter et al. (Gunter et al., 2000).
REFERENCES
Alebrahim, A., Heisel, M., and Meis, R. (2014). A
structured approach for eliciting, modeling, and using
quality-related domain knowledge. In Proc. of ICCSA
2014, LNCS 8583, pages 370–386. Springer.
Bharadwaj, R. and Heitmeyer, C. (1999). Hard-
ware/software co-design and co-validation using
the scr methodhardware/software co-design and co-
validation using the scr method. In IEEE Intl. High
Level Design Validation and Test Workshop.
Cote, I., Hatebur, D., Heisel, M., and Schmidt, H. (2011).
Uml4pf - a tool for problem-oriented requirements
analysis. In Proc. of RE 2011, pages 349–350. IEEE
Computer Society.
Gunter, C. A., Gunter, E. L., Jackson, M., and Zave, P.
(2000). A reference model for requirements and spec-
ifications. IEEE Software, 17(3):37–43.
Jackson, M. (2001). Problem Frames - Analysing and Struc-
turing Software Development Problems. Addison-
Wesley.
McMenamin, S. M. and Palmer, J. (1984). Essential Sys-
tems Analysis. Prentice Hall, London.
Miller, S. P. and Tribble, A. C. (2001). Extending the four-
variable model to bridge the system-software gap. In
Proceedings of the 20th Digital Avionics Systems Con-
ferene (DASC01).
Parnas, D. and Madey, J. (1995). Functional documents
for computer systems. Science of Computer Program-
ming, 25(1):41–61.
Patcas, L., Lawford, M., and Maibaum, T. (2013). From
system requirements to software requirements in the
four-variable model. In Proceedings of the Automated
Verification of Critical Systems (AVoCS 2013).
Pohl, K. (2010). Requirements Engineering- Fundamentals,
Principles, and Techniques. Springer.
Robert Bosch GmbH (2003). ACC Adaptive Cruise Control
- The Bosch Yellow Jackets. Edition 2003 edition.
van Lamsweerde, A. (2009). Requirements Engineering -
From System Goals to UML Models to Software Spec-
ifications. John Wiley and Sons.
Zave, P. and Jackson, M. (1997). Four dark corners of re-
quirements engineering. ACM Transactions on Soft-
ware Engineering and Methodology, 6(1):1–30.
ICSOFT-PT 2016 - 11th International Conference on Software Paradigm Trends
26
