
Augmented Postprocessing of the FTLS Vectorization Algorithm
Approaching to the Globally Optimal Vectorization of the Sorted Point Clouds
Ales Jelinek and Ludek Zalud
Department of Control and Instrumentation, Brno University of Technology, Technicka 12, Brno, Czech Republic
Keywords:
Vectorization, Point Cloud, Linear Regression, Least Squares Fitting, Mobile Robotics.
Abstract:
Vectorization is a widely used technique in many areas, mainly in robotics and image processing. Appli-
cations in these domains frequently require both speed (for real-time operation) and accuracy (for maximal
information gain). This paper proposes an optimization for the high speed vectorization methods, which leads
to nearly optimal results. The FTLS algorithm uses the total least squares method for fitting the lines into the
point cloud and the presented augmentation for the refinement of the results, is based on a modified Nelder-
Mead method. As shown on several experiments, this approach leads to better utilization of the information
contained in the point cloud. As a result, the quality of approximation grows steadily with the number of
points being vectorized, which was not achieved before. Performance costs are still comparable to the original
algorithm, so the real-time operation is not endangered.
1 INTRODUCTION
Vectorization is a process, which produces some kind
of geometrical primitive (line segment, arc, polyno-
mial curve) which describes a general shape of a given
set of data points. This procedure has several advan-
tages.
At first, vectorization converts the discrete mea-
surements into their continuous abstraction. This ef-
fect is used in mobile robotics, where laser scanners
are used for sensing of the environment around the
robot. After the measurement, the point cloud is vec-
torized and utilized during the map building process
(Nguyen et al., 2007). This is an important task of var-
ious mobile robots, especially of those dedicated to
exploration and reconnaissance (Zalud et al., 2008).
Very similar problem is the 3D surface or infrastruc-
ture reconstruction (Xu et al., 2015) from the airborne
LiDAR used in cartography. Computer vision and im-
age processing applications also take advantage of the
vectorization in various applications, such as shape
detection (Mathibela et al., 2013) and photogramme-
try (Liu et al., 2011). Another contextual domain of
application is trajectory tracking (Werner et al., 2014)
and infrastructure networks mapping, such as roads in
(Xiangyun Hu et al., 2014).
Second, the vectorization process has a general-
ization ability, which reduces noise and negligible de-
tails in the measurement. Noise reduction is very use-
ful in precise laser scanning applications, requiring
minimal error (Heinz et al., 2001). Filtration of the
negligible details is widely used in cartography, where
different levels of details are obtained with varying
settings of the vectorizing algorithm (Shi and Cheung,
2006).
The third important feature of a vectorized data
set is the reduction of the amount of the data stored.
In a typical application with thousands of measured
points converted into units or tens of line segments,
the memory savings of two orders of magnitude can
be easily observed. This fact is mainly utilized in
cartography, where large maps have to be stored ef-
ficiently (Kandal and Karschti, 2014).
The examples summarized in the previous para-
graphs clearly show, that the vectorization has a wide
usage across a variety of scientific and technical do-
mains. There are some applications, which are not
time critical, but in general, the faster and more ac-
curate the vectorization algorithm is, the higher is its
suitability for practical applications. The motivation
of the presented research is to devise a method, which
would be fast enough for the real-time applications in
robotics and image processing and which would pro-
vide results with the maximal accuracy. At the cost of
slightly reduced speed of the original algorithm, the
further described method fulfils this objective.
216
Jelinek, A. and Zalud, L.
Augmented Postprocessing of the FTLS Vectorization Algorithm - Approaching to the Globally Optimal Vectorization of the Sorted Point Clouds.
DOI: 10.5220/0005962902160223
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 216-223
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 STATE OF THE ART
There are plenty of vectorization methods described
in the literature. Various approaches are devised
for different situations, but the two main categories,
which can be distinguished, differ in the nature of the
input data. The general algorithms accept any arbi-
trary set of data points, but this advantage is redeemed
by a larger computational complexity. The second
category of the algorithms works only on the sorted
data, but usually performs much faster.
In the following text, we are going to speak about
the ”optimality” of vectorization and the ”globally op-
timal” results. Since every vectorization algorithm
employs some error function to enumerate quality of
the approximation, optimal result is achieved, when
this function reaches its minimum. Global optimality
is used to emphasize minimization of the error func-
tion for the whole data set, not just a single line seg-
ment.
2.1 General Algorithms
General algorithms are able to produce globally opti-
mal results, or resemble optimality at least. For exam-
ple, Hough transformation (Hough, 1962) in its clas-
sical implementation relies on the systematic search
through the whole state space of possible solutions.
This process can be enhanced (Norouzi et al., 2009)
to focus on the most promising areas, which might
result in globally optimal vectorization. Another pop-
ular method is RANSAC (Fischler and Bolles, 1981),
which is based on random sampling of the data set.
With enough iterations and luck, it converges to glob-
ally optimal solution as well. Another examples
are optimization techniques, suited for highly com-
plex problems, such as genetic algorithms (Mirmehdi
et al., 1997).
The paper (Nguyen et al., 2007) proves this kind
of algorithms to be significantly slower than the meth-
ods, that we are going to focus on in the rest of this
paper, but for the sake of completeness, since general
algorithms can produce globally optimal results, we
have decided not to omit them.
2.2 Algorithms for the Sorted Data Sets
Sorted data points preserve the information about the
order, in which they come after each other. The
known succession means, that only the consecutive
points can form a single line to be extracted, which
can be exploited to improve performance.
Sometimes the sorted data cannot be obtained, but
for practical situations it is not as constraining, as it
might seem. For example a border in cartography
is by a polyline, where each point has exactly de-
fined neighbours. A similar situation arises in the
laser scanning case as well: the laser usually rotates
around and the distinct measurements are obtained int
the short intervals one after another, so the order is
known as well. In the image processing we can find
the edge extracting algorithms, which produce their
results in a form of a chain of the adjacent pixels. All
of these situations are the examples of naturally or-
dered data sets, which makes the algorithms focused
on this type of input very useful.
The simplest and the fastest (Nguyen et al., 2007)
family of algorithms in this category are the point
eliminating (PE) algorithms. A large number of these
methods is described in the literature (Shi and Che-
ung, 2006). The main idea behind them is the elim-
ination of points, which do not carry a crucial in-
formation about the general shape of the point set.
After application of such algorithm, only the most
important points remain, forming a polyline approx-
imating the whole set. Due to loss of informa-
tion from the eliminated points, these methods can-
not provide very accurate results. In the experimen-
tal part of the paper, we have decided to examine
the Reumann-Witkam (RW) algorithm (Reumann and
Witkam, 1974), which has O(n) computational com-
plexity and is probably the fastest vectorization tech-
nique in practical usage. The second PE method,
which will be tested, is the Douglas-Peucker (DP)
algorithm (Douglas and Peucker, 1973), which is
O(nlogn) complex in average and represents a widely
accepted standard in real-time vectorization, being
more accurate than the RW method (Shi and Cheung,
2006), but still very fast (Nguyen et al., 2007).
The second group of the algorithms for vector-
ization of the sorted data is based on the total least
squares (TLS) fitting of the regression line. The main
advantage over the PE methods consists in utiliza-
tion of all of the information contained in the data
set. This leads to higher accuracy, which can effec-
tively suppress the noise. Classical implementation
of the TLS vectorization is the Incremental (INC) al-
gorithm (Nguyen et al., 2007). The optimized version
of the INC algorithm is the Fast Total Least Squares
(FTLS) method (Jelinek et al., 2016). It produces the
same output as the INC algorithm, but significantly
faster, especially when a large set of points is being
processed. Both of these methods will be examined
in the experimental section, because INC algorithm
is widely known and FTLS is its recent faster alter-
native. Asymptotic complexity of both algorithms is
O(n). FTLS is also a base for the optimization pro-
posed in this paper.
Augmented Postprocessing of the FTLS Vectorization Algorithm - Approaching to the Globally Optimal Vectorization of the Sorted Point
Clouds
217
2.3 The Problem in the Threshold based
Vectorization
Every vectorization algorithm has an error function.
The general algorithms usually search each line seg-
ment in the data set separately, which leads to min-
imization of the error function in each case. Con-
versely, the algorithms for the sorted data, exploit the
continuity of the given point cloud, traverses through
the data set and set up the break points of the approx-
imating polyline. This approach is prone to give the
nonoptimal results as shows the following example.
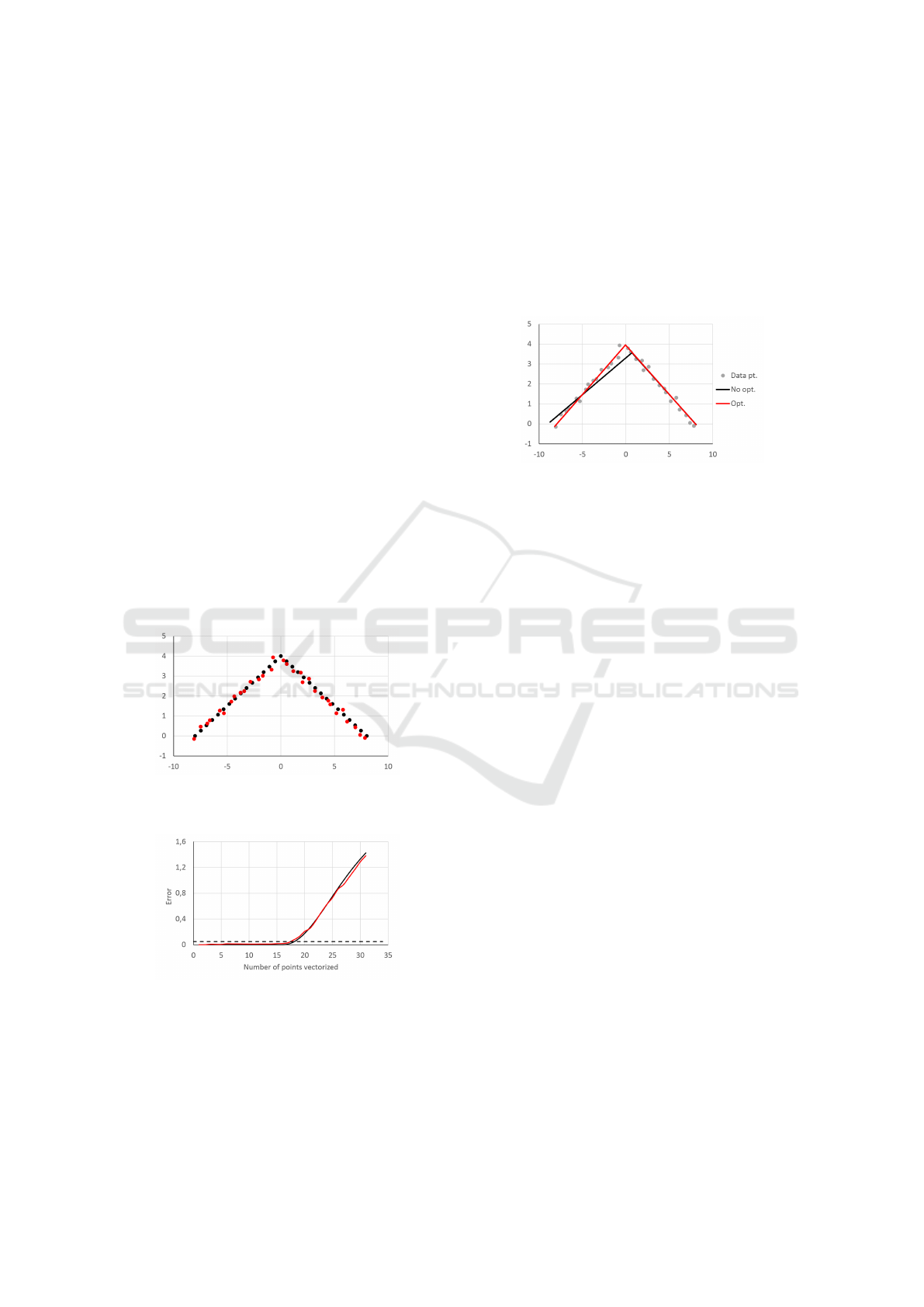
Fig. 1 displays two point clouds: one precise
(black) and one noised (red). Both point clouds are
ordered, as if they were obtained by a laser scanner.
Fig. 2 shows the characteristics of the error function
generated by a TLS method for a given number of
points, counted from the beginning of the cloud. As
expected, the first half of the precise point cloud is
vectorized with a zero error, since the points lie ex-
actly in a line. After the midpoint, the error starts to
grow monotonically. Though the whole shape is quite
similar, the first half of the red characteristics is cor-
rugated, contains local minima and the break point,
where the error starts to grow rapidly, is not defined
as well as in the previous case.
Figure 1: An example of two simple point clouds. The black
one is precisely generated to form a sharp corner, while the
red one has added a realistic noise.
Figure 2: The error functions generated for the various
number of points from example point clouds in Fig. 1, ob-
tained by the TLS vectorization algorithm. The black char-
acteristics belongs to the precise data set and the red chart
to the noised one. The dashed line illustrates a defensive
choice of a threshold level for a robust vectorization.
All of the fast vectorization methods (whether PE
or TLS) employ a threshold, which is compared to the
error function in each iteration and when exceeded,
the break point is set up and a new approximation is
started. Due to the fact, that the error characteristics
is not ideal, the threshold must be set with appropri-
ate reserve, to ensure robustness and immunity to the
noise. Such a defensive choice of the threshold leads
to higher error than necessary for every line segment
in the approximating polyline, except the last one, as
can be seen in Fig. 3.
Figure 3: Optimal (red) and suboptimal (black) vectoriza-
tion of the noised point cloud (gray). The red and black line
segments approximating the second half of the point cloud
overlap each other.
The negative influence of the defensively chosen
threshold was slightly magnified for the illustrational
purposes in this case, but even without that, it is a
serious drawback of all of the fast vectorization al-
gorithms. This effect manifests regardless the algo-
rithms traverse the point cloud incrementally (INC
and RW), or perform some sort of an adapted binary
search (FTLS and DP). It is also impossible to sup-
press it by calibration (Kocmanova et al., 2013) or
identification (Zalud et al., 2015) of the laser scanner,
because the described problem is an inherent feature
of the TLS and PE algorithms, not a flaw of the input
data. The rest of the paper is focused on minimization
of this unnecessary error.
3 AUGMENTATION OF THE
FTLS ALGORITHM
Globally optimal vectorization of a continuous point
cloud is a really challenging task. There is no prior in-
formation either on the number of line segments in the
approximating polyline, or the position of the break
points. This high degree of uncertainty leads to em-
ployment of the traditional vectorization algorithms
to get an initial guess of the approximation and than
use it for further optimization.
As the primary algorithm, we have chosen the
FTLS algorithm (Jelinek et al., 2016), which is based
o the TLS method and is reasonably fast. The algo-
rithm has three stages of the data processing. The first
one produces precomputed sums for every data point
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
218

in the cloud. The data vector belonging to each point
is as follows:
a
i
=
"
x
i
, y
i
,
i
∑
k=1
x
k
,
i
∑
k=1
y
k
,
i
∑
k=1
x
2
k
,
i
∑
k=1
y
2
k
,
i
∑
k=1
x
k
y
k
#
,
(1)
for i = 1. . . N, where N is the number of points be-
ing vectorized. For our purposes, we define an ad-
ditional vector a
0
= [0, 0, 0, 0, 0, 0, 0] and form an
augmented data matrix:
A =
a
0
a
1
. . . a
N
T
. (2)
We also define a submatrix of A as:
A[p, q] =
a
p
. . . a
q
T
, (3)
determined by the row indices p and q, which follow
the condition 0 ≤ p < q ≤ N.
The second stage of the FTLS algorithm is dedi-
cated to line extraction. The output is an ordered set
of extracted lines, which approximate the whole point
cloud. Every extracted line has an exactly defined in-
terval of points, which belong to it. This information
is used to build a break point vector, where the index
of the last point of every line is stored:
b = [b
0
, b
1
, . . . , b
L
]. (4)
The b
0
= 0 is a dummy element representing a virtual
point before the beginning of the point cloud. The
last break point always refers to the end of the point
cloud, therefore b
L
= N. All the other break points
satisfy the condition: b
i−1
< b
i
for i = 1 . . . L .
Every extracted line has also attached an error
value, which describes, how well the line approxi-
mates the given data. The TLS methods use the vari-
ance of perpendicular distances of points to the line.
The paper (Jelinek et al., 2016) define it in the follow-
ing manner:
σ
2
=
1
n
a
2
n
∑
i=1
x
2
i
+ 2ab
n
∑
i=1
x
i
y
i
+ b
2
n
∑
i=1
y
2
i
!
− c
2
.
(5)
n is the number of points belonging to the line and a,
b and c are the coefficients of a line in a neutral for-
mat: ax + by + c = 0 in XY coordinate system. If a
half-open interval of points (p, q] is given, the sums
can be easily obtained by a simple subtraction of vec-
tors a
q
and a
p
. Since the coefficients a, b and c can
be expressed as a function of A[p,q] as well, we can
denote the variance: σ
2
(A[p, q]).
This adjustment of the notation allows us to ex-
press the error E of the approximation of the whole
point cloud. It is defined as follows:
E(b) =
L
∑
i=1
σ
2
(A[b
i−1
, b
i
])
b
i
− b
i−1
N
. (6)
The original FTLS algorithm does not evaluate any
global error metrics, its third stage consists only in
turning the extracted lines into the polyline, which de-
scribes the general shape of the point cloud. This ap-
proximation is necessarily suboptimal, due to the ef-
fect described in the Subsection 2.3. To get the glob-
ally optimal results analytically, the following set of
the equations would have to be solved:
∂E(b)
∂b
1
= 0 . . .
∂E(b)
∂b
L−1
= 0. (7)
There is only L − 1 of equations for L extracted lines,
because b
0
and b
L
coefficients are defined to be con-
stant, when building the break point vector b ac-
cording to the equation (4). Unfortunately, the an-
alytic solution of the system (7) is extremely com-
plicated or even impossible, because the error func-
tion σ
2
(A[p, q]) is highly non-linear. It also does not
grow monotonically, which possibly leads to an un-
predictable number of local minima.
To overcome this issue, we have decided to em-
ploy the Nelder-Mead (NM) method (Nelder and
Mead, 1965). It is a non-gradient optimization tech-
nique, which only relies on enumeration of the op-
timized function for various input arguments. This
is a key feature, because thanks to the precomputed
sums of the FTLS algorithm, the evaluation of the
error function is very fast. The NM method is de-
signed for localization of extremes of the non-linear
functions with arbitrary number of arguments. The
method is based on a simplex composed of D+ 1 ver-
tices in a D-dimensional space of possible arguments
of the optimized function. Each vertex has its func-
tion value attached and every iteration the least suit-
able one is replaced by a newly computed successor.
The function value of the new vertex is usually bet-
ter than the previous one, so as the iterations proceed,
the simplex shrinks and closes to the set of arguments
giving the optimal value.
In the original NM method, the simplex is de-
scribed by a set of D + 1 vectors with D elements. In
our case of the search for the optimal break point posi-
tions, the situation is slightly more complex, because
every argument vector for the optimized error func-
tion (6) has constants at the beginning and at the end.
At the beginning of the optimization process, there is
only one initial guess on position of the break points
produced by the second stage of the FTLS algorithm,
therefore L−1 new vertices have to be generated. The
resulting simplex has the structure:
S =
s
0
s
1
. . . s
L−1
T
, (8)
Augmented Postprocessing of the FTLS Vectorization Algorithm - Approaching to the Globally Optimal Vectorization of the Sorted Point
Clouds
219

generated by the following rules:
s
0
= b,
s
i, j
= b
j
i 6= j,
s
i, j
= b
j
− τ i = j,
(9)
for i = 1. . . (L − 1) and j = 0 . . . L. As the first vertex,
the initial guess is adopted without any changes. The
remaining L − 1 vertices are generated by subtracting
a user defined value τ from a single element of the
vector b (different element for every new vertex). The
τ parameter is an integral variable and should fulfil
the condition τ < b
0
to ensure, that all the elements
of the vertex will satisfy the constraints discussed al-
ready beside the equation (4). τ should correspond
to an expected number of extra points assigned to the
line segment, but the NM method is robust enough to
handle even very rough estimates.
The vertex manipulating operations, which com-
pose the core of every iteration of the NM method,
were implemented in our algorithm according to (La-
garias et al., 1998). The structure of the iteration is
well described, therefore we are not going to repro-
duce the details. The error function (6) and the sim-
plex (8) are enough to start the optimization process.
There are two major differences to the original ap-
proach. The first is the introduction of constraints to
otherwise unconstrained method. In general, adding
constraints to the NM method can be very compli-
cated (Le Floc’h, 2012), but in our case, adding limits
cannot lead to worse results, than the initial guess,
neither can cause a collapse of the method. Be-
cause the break points must keep the order deter-
mined by the points in the source point cloud, the
algorithm does not search through the whole (L − 1)-
dimensional space, but only through its part, limited
by the inequality s
i, j−1
< s
i, j
for i = 0 . . . (L − 1) and
j = 1 . . . L. This condition is checked every time af-
ter a new vertex is generated and proceeds from the
end to the beginning of the particular vector. Any
break points out of the range are trimmed to fit into
the boundaries. A new error function value is com-
puted after this check.
The second difference to the original approach is
the discreteness of the arguments of the optimized
function. While the original method is designed to
be used with real numbers, the break points can be
only integers. In combination with the constraints dis-
cussed above, this means, that there is a finite number
of possible vertices. At the end of the iteration pro-
cess, as the solution becomes more precise, the ver-
tices inevitably start to overlap and the simplex col-
lapses. If that happens, or if the vertices end up in
one hyperplane, the algorithm is stopped and the best
solution is taken as the output of the optimization.
The concept described above ensures, that no
worse result than the initial guess can appear and in
the vast majority of cases a significant improvement
can be observed. The postprocessing, after the mod-
ified NM optimization is over, is the same as in the
original FTLS algorithm.
4 EXPERIMENTAL VALIDATION
OF THE METHOD
This section presents several experiments for evalua-
tion of the precision gains and the performance costs
of the augmented FTLS method. For the convenience,
we are going to use the AFTLS abbreviation. Be-
cause the AFTLS method is derived directly from the
FTLS method, we are going to follow the experimen-
tal methodology presented in (Jelinek et al., 2016)
and repeat some benchmarks with the new augmented
vectorization technique. The datasets for the experi-
ments in Fig. 5-8 are directly adopted from (Jelinek
et al., 2016) and so are the illustrational pictures (the
(a) subfigure in all of the specified cases). All of the
measurements are performed again to unify the test
conditions.
All of the algorithms and benchmarks were imple-
mented in the C++ programming language and com-
piled with Microsoft Visual Studio 2012, using the
O2 optimization setting. No other optimizations were
made to keep the tests as general as possible. An in-
terested user of the algorithms may benefit from mul-
tithreaded implementation, SIMD instructions, loop
unrolling and many other techniques, which can im-
prove the performance significantly, but are highly
platform dependant. The computer used for running
the benchmarks had a six-core, 64-bit AMD FX-6350
CPU, which runs on 3.9 GHz. Processor cache mem-
ory is large enough to hold all of the data processed
in one iteration.
The metrics used for precision evaluation of the
examined methods is the same as in (Jelinek et al.,
2016), which is based on computation of the error
area demarcated by the true edge and the extracted
polyline approximation. Neither the error metrics for
a single line (5), nor the error function for the whole
continuous point cloud (6), used during the vectoriza-
tion process, are suitable, because both of them ap-
parently cannot take into account the real edges.
The first tested case is shown in Fig. 4a. The con-
tinuous parts of the point cloud can be approximated
by a single line, which is a perfect situation for com-
parison of the PE and the TLS based methods. From
the precision benchmark in Fig. 4b it is clear, that the
PE methods are not capable to utilize the information
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
220
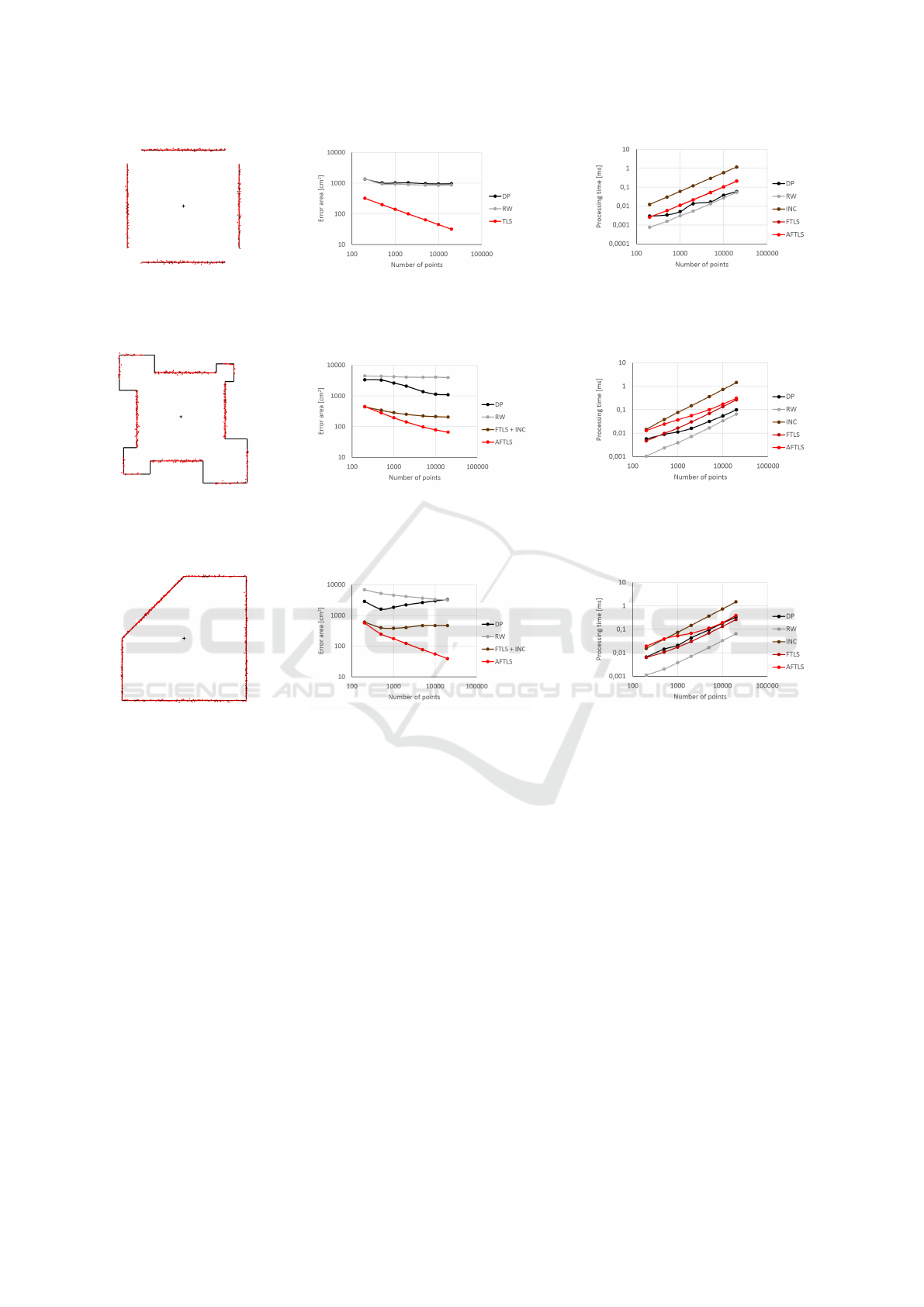
(a) The point cloud. (b) The precision benchmark. (c) The speed benchmark.
Figure 4: An example of a simple point cloud where no break points are present. All of the TLS based methods provide the
same precision of vectorization and the FTLS and AFTLS algorithms exhibit the same speed.
(a) The point cloud. (b) The precision benchmark. (c) The speed benchmark.
Figure 5: This example consists of eight continuous parts, four of which contain one break point and four is straight without
bending. The AFTLS algorithm provides the most accurate results.
(a) The point cloud. (b) The precision benchmark. (c) The speed benchmark.
Figure 6: The continuous point cloud examined in this experiment has four bendings. As the number of break points in the
cloud increases, the advantage of the AFTLS method becomes even more evident.
from all of the processed points, while the TLS meth-
ods use it to gradually refine the results as the num-
ber of points grows. The speed benchmark in Fig. 4c
proves, that there is no performance penalty of the
AFTLS algorithm, if no break points are present.
The second, example in Fig. 5a contains straight
lines and polylines with one break point. The FTLS
and INC algorithms, although TLS based and signif-
icantly more accurate than the PE methods, cannot
lower the error under certain threshold, because of
the problem discussed in Section 2.3. The AFTLS al-
gorithm effectively solves this issue and provides the
better results, the higher is the amount of the input
points (see Fig. 5b). Computational costs are evident
from the speed benchmark in Fig. 5c. The relative
performance loss decreases with the number of points
being processed.
The shape of the point cloud depicted in Fig. 6a
leads to even stronger manifestation of effects dis-
cussed in the previous paragraph. AFTLS keeps to
refine the output polyline with the growing number of
processed points as before (see Fig. 6b) and the speed
sticks close to the FTLS characteristics as well (see
Fig. 6c). We have not deeply examined the behaviour
of the DP and the RW precision characteristics ob-
servable in Fig. 5b and Fig. 6b, because the paper is
focused on the AFTLS algorithm. We believe, it orig-
inates from the hidden regularities in the point cloud
generator, which are related to the given number of
points. Nevertheless, the fact that the PE methods are
not able to utilize the information from the eliminated
points can still be considered valid.
The last two experiments shown in Fig. 7 and
Fig. 8 are virtual simulations of an environment,
which is commonly encountered by a mobile robots.
Results are similar and correspond to the findings
Augmented Postprocessing of the FTLS Vectorization Algorithm - Approaching to the Globally Optimal Vectorization of the Sorted Point
Clouds
221

(a) The point cloud. (b) The precision benchmark. (c) The speed benchmark.
Figure 7: The point cloud obtained in a virtually simulated environment. The AFTLS algorithm provides the most precise
approximations, while the speed is comparable (yet lower) to the other algorithms.
(a) The point cloud. (b) The precision benchmark. (c) The speed benchmark.
Figure 8: Another example of a virtual environment similar to real world cases. The results correspond to the expectations
about behaviour of the tested algorithms.
from the previous experiments. The AFTLS method
consistently delivers the most accurate results. For
point clouds with lower number of points, the pre-
cision gain is small and relative computational cost
high in comparison with the FTLS method, but for
the dense point clouds, it is definitely worthwhile.
Experimenting with the real laser scans was found
to be very complicated. The first issue is a limited
number of the output points of the laser scanners
available these days. The Velodyne HDL 32, that we
have used for testing, delivers ca. two thousands of
points per scan. This is right enough to see the ben-
efits of the AFTLS method, but the most significant
results are expected in the future, with more output
points. The second big issue is the precision of the
reference measurement for the precision benchmark-
ing. Every millimetre in the reference measurement
taken in an empty room, had a serious impact on the
error enumeration, which could easily cause the mis-
leading results. We have tested only the speed on real
data, which was proved to be in perfect agreement
with simulations in Fig. 7a and 8a. The same we ex-
pect for accuracy.
5 CONCLUSIONS
This paper proposes a new approach to fast vectoriza-
tion of the sorted point clouds. The presented method
originates from the FTLS algorithm, which is based
on the TLS line fitting, therefore it can utilize the in-
formation from every processed point in the cloud.
It also incorporates an optimization mechanics based
on a modified Nelder-Mead method, to overcome the
general problem of the fast, threshold based, vector-
ization techniques. Since the optimization is based
on the NM method and the function for estimation
of the global error of the approximation is not guar-
anteed to have a single minimum, we cannot claim
the method to be truly globally optimal. On the other
hand, the algorithm with this augmentation is able to
refine the vectorization results and approach the glob-
ally optimal solution very close. The results of several
experiments have proved, that the augmented FTLS
algorithm significantly enhances precision of the ap-
proximation of the point cloud, especially of the most
dense ones containing many thousands of points. This
fact is really promising, because the laser scanners
with higher point densities can be expected in the near
future.
Further research in this field is going to be fo-
cused on effective implementation of the algorithm on
a special hardware architectures and the deployment
to the practical applications, which could take advan-
tage of a fast and highly precise vectorization, such as
robotics and machine vision.
ACKNOWLEDGEMENTS
The grant No. FEKT-S-14-2429 - ”The re-
search of new control methods, measurement pro-
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
222

cedures and intelligent instruments in automation”
financially supported by the Internal science fund
of BUT. The Department of Control and Instru-
mentation (BUT - FEEC). The project CEITEC
(CZ.1.05/1.1.00/02.0068), financed from the Euro-
pean Regional Development Fund and by the TACR
under the project TE01020197 - CAK3.
REFERENCES
Douglas, D. H. and Peucker, T. K. (1973). Algorithms for
the Reduction of the Number of Points Required to
Represent a Digitized Line or its Caricature. Carto-
graphica: The International Journal for Geographic
Information and Geovisualization, 10(2):112–122.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
Heinz, I., Hartl, F., and Frohlich, C. (2001). Semi-
automatic 3D CAD model generation of as-built con-
ditions of real environments using a visual laser radar.
In Proceedings 10th IEEE International Workshop
on Robot and Human Interactive Communication.
ROMAN 2001 (Cat. No.01TH8591), pages 400–406.
IEEE.
Hough, P. V. C. (1962). Method and Means for Recognizing
Complex Patterns.
Jelinek, A., Zalud, L., and Jilek, T. (2016). Fast total least
squares vectorization. Journal of Real-Time Image
Processing.
Kandal, P. and Karschti, S. (2014). Method for simplified
storage of data representing forms.
Kocmanova, P., Zalud, L., and Chromy, A. (2013). 3D prox-
imity laser scanner calibration. In 2013 18th Interna-
tional Conference on Methods & Models in Automa-
tion & Robotics (MMAR), pages 742–747. IEEE.
Lagarias, J. C., Reeds, J. a., Wright, M. H., and Wright, P. E.
(1998). Convergence Properties of the Nelder–Mead
Simplex Method in Low Dimensions. SIAM Journal
on Optimization, 9(1):112–147.
Le Floc’h, F. (2012). Issues of Nelder-Mead Simplex Opti-
misation with Constraints. SSRN Electronic Journal,
pages 1–7.
Liu, Z., Zhang, B., Li, P., Guo, H., and Han, J. (2011).
Automatic registration between remote sensing image
and vector data based on line features. In 2011 19th
International Conference on Geoinformatics, number
2008, pages 1–5. IEEE.
Mathibela, B., Posner, I., and Newman, P. (2013). A road-
work scene signature based on the opponent colour
model. In 2013 IEEE/RSJ International Conference
on Intelligent Robots and Systems, pages 4394–4400.
IEEE.
Mirmehdi, M., Palmer, P. L., and Kittler, J. (1997). Robust
line segment extraction using genetic algorithms. In
Image Processing and Its Applications, 1997., Sixth
International Conference on, volume 1, pages 141 –
145 vol.1. IEEE.
Nelder, J. A. and Mead, R. (1965). A Simplex Method
for Function Minimization. The Computer Journal,
7(4):308–313.
Nguyen, V., G
¨
achter, S., Martinelli, A., Tomatis, N., and
Siegwart, R. (2007). A comparison of line extrac-
tion algorithms using 2D range data for indoor mobile
robotics. Autonomous Robots, 23(2):97–111.
Norouzi, M., Yaghobi, M., Siboni, M., and Jadaliha, M.
(2009). Recursive line extraction algorithm from 2d
laser scanner applied to navigation a mobile robot. In
2008 IEEE International Conference on Robotics and
Biomimetics, pages 2127–2132. IEEE.
Reumann, K. and Witkam, A. P. M. (1974). Optimiz-
ing Curve Segmentation in Computer Graphics. In
Proceedings of International Computing Symposium,
pages 467–472, Amsterdam. North-Holland Publish-
ing Company.
Shi, W. and Cheung, C. (2006). Performance Evaluation
of Line Simplification Algorithms for Vector General-
ization. The Cartographic Journal, 43(1):27–44.
Werner, M., Schauer, L., and Scharf, A. (2014). Reliable
trajectory classification using Wi-Fi signal strength in
indoor scenarios. In 2014 IEEE/ION Position, Loca-
tion and Navigation Symposium - PLANS 2014, pages
663–670. IEEE.
Xiangyun Hu, Yijing Li, Jie Shan, Jianqing Zhang, and
Yongjun Zhang (2014). Road Centerline Extraction in
Complex Urban Scenes From LiDAR Data Based on
Multiple Features. IEEE Transactions on Geoscience
and Remote Sensing, 52(11):7448–7456.
Xu, C., Frechet, S., Laurendeau, D., and Miralles, F. (2015).
Out-of-Core Surface Reconstruction from Large Point
Sets for Infrastructure Inspection. In 2015 12th Con-
ference on Computer and Robot Vision, pages 313–
319. IEEE.
Zalud, L., Kocmanova, P., Burian, F., Jilek, T., Kalvoda, P.,
and Kopecny, L. (2015). Calibration and Evaluation
of Parameters in A 3D Proximity Rotating Scanner.
Elektronika ir Elektrotechnika, 21(1):3–12.
Zalud, L., Kopecny, L., and Burian, F. (2008). Orpheus
Reconnissance Robots. In 2008 IEEE International
Workshop on Safety, Security and Rescue Robotics,
number October, pages 31–34. IEEE.
Augmented Postprocessing of the FTLS Vectorization Algorithm - Approaching to the Globally Optimal Vectorization of the Sorted Point
Clouds
223
