
Unsupervised Contextual Task Learning and Recognition for
Sharing Autonomy to Assist Mobile Robot Teleoperation
Ming Gao, Ralf Kohlhaas and J. Marius Z
¨
ollner
FZI Research Center for Information Technology, 76131 Karlsruhe, Germany
Keywords:
Shared Autonomy, Assisted Teleoperation, Mobile Robot, Unsupervised Learning from Demonstration.
Abstract:
We focus on the problem of learning and recognizing contextual tasks from human demonstrations, aiming
to efficiently assist mobile robot teleoperation through sharing autonomy. We present in this study a novel
unsupervised contextual task learning and recognition approach, consisting of two phases. Firstly, we use
Dirichlet Process Gaussian Mixture Model (DPGMM) to cluster the human motion patterns of task executions
from unannotated demonstrations, where the number of possible motion components is inferred from the data
itself instead of being manually specified a priori or determined through model selection. Post clustering, we
employ Sparse Online Gaussian Process (SOGP) to classify the query point with the learned motion patterns,
due to its superior introspective capability and scalability to large datasets. The effectiveness of the proposed
approach is confirmed with the extensive evaluations on real data.
1 INTRODUCTION
We focus on mobile robot teleoperation, which has
been widely applied to situations where human ex-
cursion is impractical or infeasible, such as search
and rescue in hazardous environments, and telepre-
sense for social needs in domestic scenarios. Due to
time delay and lack of situational awareness (SA), it
is troublesome and stressful for the human operator to
simply teleoperate the robot without assistance. On
the other hand, robot cannot yet carry out tasks alone
based on the current achievements in cognitions and
controls. Hence the human and the robot have to co-
operate with each other in an appropriate way, in or-
der to efficiently perform tasks in remote. The major
challenge is how to best coordinate the two intelligent
sources from the human and the robot, to guarantee an
optimal task execution, which has been the research
focus of shared autonomy (Sheridan, 1992).
To address the challenge, we argue that, the robot
is supposed to recognize the on-going tasks the hu-
man operator performs with the contextual informa-
tion, aiming to provide proper motion assistance in a
task-aware manner, in order to optimally cope with
the human operator to improve the remote task per-
formance. Such strategy is proved to promote task
performance in the presence of time delays (Hauser,
2013), because the robot is able to predict the desired
task in the midst of a partially-issued command. In
our work, a task refers to an intermediary between
user intention and robot action, which is a metric rep-
resentation of the user intention for a robot to com-
plete an action primitive.
Since the way the user executes a task is implicit,
most state-of-art approaches on this topic employ su-
pervised learning approaches to encode and recognize
the human motion patterns executing multiple task
types from labelled demonstrations (Stefanov et al.,
2010)(Hauser, 2013)(Gao et al., 2014). However, it
is difficult for the human expert to manually segment
a demonstration into meaningful action primitives for
the robot to learn, and in the long run, the manual an-
notation will be error-prone to limit the applicability
of the system, when demonstration data for more and
more task types need to be labelled. To scale with
such situation, we report in this study a novel unsu-
pervised contextual task learning and recognition ap-
proach, consisting of two phases. In the first place,
we use Dirichlet Process Gaussian Mixture Model
(DPGMM) to cluster the motion patterns of task exe-
cutions from demonstrations without labels. The ma-
jor advantage of applying DPGMM for clustering is
that the number of possible motion modes (i.e. mo-
tion clusters) is inferred from the data itself instead
of being manually specified a priori or determined
through model selection, which is required when us-
ing e.g. Gaussian Mixture Model (GMM) and K-
Means on this topic. Moreover, we are able to dis-
238
Gao, M., Kohlhaas, R. and Zöllner, J.
Unsupervised Contextual Task Learning and Recognition for Sharing Autonomy to Assist Mobile Robot Teleoperation.
DOI: 10.5220/0005972002380245
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 238-245
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

cover both overlaps and distinctions of the task execu-
tion patterns through clustering, which can be used as
the knowledge base for interpreting the query patterns
later on. Post clustering, we employ a non-parametric
Bayesian method, i.e. Sparse Online Gaussian Pro-
cess (SOGP) classifier to classify the query point with
the learned motion clusters during operation, due to
its superior introspective capability over other state-
of-art classifiers, such as Support Vector Machine
(SVM), which is probably most widely used algo-
rithm for classification. Thanks to this property, the
SOGP classifier favours an active learning strategy,
where the robot can actively ask for demonstrations
to add to training datasets when facing un-modelled
motion patterns. Meanwhile, the SOGP classifier is
able to maintain scalability to large datasets, which is
significant for our application.
The remainder of this paper is organized as fol-
lows. Section 2 introduces the related work. Section 3
describes the proposed approach in detail. The experi-
mental results and discussions are presented in section
4. Finally, we summarize the conclusions in section
5.
2 RELATED WORK
Prior work in the field of assisted teleoperation has
been mainly conducted in the context of telemanip-
ulation. Dragan et al. (Dragan and Srinivasa, 2012)
formalize the assisted teleoperation to consist of two
parts: the user intention prediction and the arbitration
of the user input and the robot’s prediction. In their
work, the user intention is assumed to track optimal
trajectories towards the grasp objects. Haus (Hauser,
2013) proposes a task inference and motion planning
system to assist the teleoperation of a 6D robot ma-
nipulator using a 2D mouse. However, it concentrates
on the freeform tasks compared with our problem of
recognizing the contextual tasks, which depends on
the information of related objects in the environment.
In the context of assisting mobile robot teleopera-
tion, Fong et al. (Fong et al., 2001) propose a dialogue
based approach, where the user can communicate ex-
plicitly with the robot to obtain a better situational
awareness. Though being intuitive for the human op-
erator, the dialogue based framework can increase the
user workload, especially when robot raises a huge
amount of questions through the dialogues. Sa et al.
report a shared autonomy control scheme for a quad-
copter in (Sa et al., 2015), aiming to assist the inspec-
tion of vertical infrastructure, where an unskilled user
is able to safely operate the quadcopter in close prox-
imity to target structures due to on-board sensing and
partial autonomy of the robot. Okada et al. (Okada
et al., 2011) introduce a shared autonomy system
for tracked vehicles. Based on the continuous three-
dimensional terrain scanning, the system actively as-
sists the control of the robot’s flippers to reduce the
workload of the operator, when the robot is teleoper-
ated to traverse rough terrains. Both works consider
only single task type for assistance, i.e. inspection
of vertical infrastructure or rough terrain traversal. In
contrast, our approach is able to recognize and sup-
port multiple contextual task types through learning
motion patterns from demonstrations.
3 METHODOLOGY
3.1 Overview
To employ machine learning approach to learn the hu-
man motion patterns performing various contextual
task types from demonstrations, the motion patterns
are described with a set of task features, which will
be firstly introduced in this section. The technique
details of employing DPGMM and SOGP on cluster-
ing and recognizing the motion patterns of task exe-
cutions from unlabelled demonstrations will be pre-
sented respectively in the following parts of the sec-
tion.
3.2 Task Feature
A task feature q embodies an instantiation of the mo-
tion pattern executing certain contextual task type,
which is built upon environmental information and
user input u.
The user input u is issued from a normal joystick,
which consists of translational velocities along x and
y axes, and rotational velocity around z axis in the
robot’s local coordinate frame: u = (v
x
,v
y
,v
ω
). Each
input channel is normalized to the range of (−1,1),
where the positive sign indicates that, for the trans-
lational velocities, the input is along the positive di-
rection of the corresponding axis, and for the rota-
tional velocity, it is in the counter-clockwise direction
around z axis.
The environmental information is encoded with
the intentional target point s, which is extracted from
the semantic components of indoor scenarios, i.e.
doorway, object and wall segments, and transferred to
a two-dimensional coordinate in the local frame fixed
on the robot center: s = (x
η
,y
η
), since we employ a
2D Laser Range Finder (LRF) to perceive the envi-
ronment, but it is straightforward to extend the defini-
tion to 3D configuration. More specifically, for door-
Unsupervised Contextual Task Learning and Recognition for Sharing Autonomy to Assist Mobile Robot Teleoperation
239

way, we select its center point as the intentional target
point for the robot to reach or cross. For object and
wall segments, we choose their nearest surface points
to the robot center during operation to be the inten-
tional target point for the robot to follow, since the
surface points of an object or wall segment implicitly
characterize its shape.
In addition to s and u, we compute the angle θ
between the user input vector u
xy
= (v
x
,v
y
) and the
vector r
s
from the robot center to s, to be part of a
task feature. θ represents the user input direction,
hence the movement direction of the robot, relative
to s, which bridges two sources of contextual infor-
mation: environmental perception and user input, and
vaguely indicates the user intention for operating the
robot regarding the corresponding semantic compo-
nents. Based on the above introductions, a task fea-
ture can be expressed as q = (s,θ,u).
Although we consider just doorway, object and
wall to construct task feature here, it is intuitive to
obtain task feature from more types of semantic com-
ponents of the environment, such as docking place,
where the intentional target point is the center point
of the docking area, and the human target, e.g. when
the task is to follow a human during telepresence, the
intentional target point of which can be the position
of the detected human.
The following part will report how we apply
DPGMM to cluster motion patterns with task fea-
tures.
3.3 Motion Clustering with DPGMM
During demonstration, we obtain the task features q
computed from the target semantic components of the
scenario, which are described with no specific task
type, i.e. unlabelled.
To discover possible clusters of motion patterns
(i.e. modes) from the unlabelled demonstration data,
we use the Dirichlet Process (DP) prior on the dataset,
which allows an infinite collection of modes, and an
appropriate number of modes is inferred directly from
the data in a fully Bayesian way, without the need for
manual specification or model selection (Blei et al.,
2006). Mathematically, the DP is described with the
stick-breaking process:
G ∼ DP(α
0
H),
G ,
∞
∑
k=1
λ
k
δ
φ
k
,
v
k
∼ Beta(1,α
0
),
λ
k
= v
k
k−1
∏
l=1
(1 − v
l
).
Where G is an instantiation of the DP consisting of
an infinite set of clusters/mixture components, and λ
k
denotes the mixture weight of the component k. Each
data item n chooses an assignment according to w
n
∼
Cat(λ), and then samples observations q
n
∼ F(φ
w
n
).
Since q
n
is multi-dimensional real-valued data in our
application, we take F to be Gaussian. φ
k
is the data-
generating parameter for the component k, which is
drawn from the normal-Wishart distribution H with
natural parameters ρ
0
, facilitating the full-mean, full-
covariance analysis.
At the heart of DPGMM is the inference tech-
nique, whose goal is to recover stick-breaking pro-
portion v
k
and data-generating parameters φ
k
for each
mixture component k, as well as discrete cluster as-
signment w = {w
n
}
N
n=1
for each observation from the
demonstration dataset, which maximizes the joint dis-
tribution:
p(Q,w, φ,v) =
N
∏
n=1
F(q
n
|φ
w
n
)Cat(w
n
|λ(v))
∞
∏
k=1
Beta(v
k
|1,α
0
)H(φ
k
|ρ
0
). (1)
We employ a variational Bayesian variant in-
ference algorithm, named Memoized Online Varia-
tional Inference (Hughes and Sudderth, 2013), to in-
fer the posterior (Eq.1), which scales to large yet fi-
nite datasets while avoiding noisy gradient steps and
learning rates together, and allows non-local opti-
mization by developing principled birth and merge
moves in the online setting. For more details regard-
ing the algorithm, please refer to (Hughes and Sud-
derth, 2013).
Each learned motion cluster is considered as an
action primitive, which can be used with the estimated
semantic target to interpret the motion patterns of the
human operator performing certain contextual tasks
associated with the target in the form of the trajectory
the human operator intends to execute (will be shown
in section 4). Hence the robot can efficiently help
with the task execution by assisting the human opera-
tor to safely track the intentional trajectory in remote.
From this perspective, it is supposed to classify the
query task features obtained from multiple candidate
semantic components to the learned motion clusters,
in order to find the most probable cluster and the as-
sociated semantic component during operation, where
we employ SOGP classifier to achieve this, which will
be covered in the following part.
3.4 Motion Classification with SOGP
To recognize which motion patterns (including the
associated semantic targets) the human operator ex-
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
240

ecutes, we employ the SOGP classifier (Gao et al.,
2016) to classify the query task features to the learned
motion clusters. We will briefly introduce how we
adapt it to our application in this subsection. For more
technical details regarding the SOGP classifier, please
refer to (Gao et al., 2016).
Specifically, by following the one-vs-all formula-
tion, we attempt to infer:
p(t
(c)
∗
|q
∗
,Q
L
,t
(c)
L
), (2)
where t
(c)
∗
and t
(c)
L
indicate the predictive label of a
query task feature q
∗
and the labels of the motion
cluster data Q
L
respectively, with t
(c)
∈ {−1,1}
n
rep-
resenting the observation vector of binary labels for
cluster c ∈ {1, ...,M}, where M is the number of the
clusters. We assume a zero mean function and that ob-
served values t
(c)
L
of the latent function are corrupted
with independent Gaussian noise with variance σ
2
(c)
,
resulting into a closed-form solution for the posterior:
p(t
(c)
∗
|q
∗
,Q
L
,t
(c)
L
) = N (t
(c)
∗
|µ
(c)
∗
,σ
2
∗(c)
). (3)
Hence the final score of the multi-class classifier is
achieved by taking the maximal predictive posterior
mean across all clusters:
µ
mc
∗
= max
c=1...M
µ
(c)
∗
= max
c=1...M
k
T
∗
(K + σ
2
(c)
I)
−1
t
(c)
L
, (4)
and returning the corresponding label
1
c, where k
∗
=
κ(Q
L
,q
∗
) and K = κ(Q
L
,Q
L
) denote the kernel val-
ues of the training set and the query point, which are
computed with the squared exponential (SE) kernel in
this paper. Meanwhile, we also get the posterior vari-
ance σ
2
∗(mc)
from the classifier prediction, which facil-
itates excellent uncertainty estimation together with
the predictive posterior mean. This property can be
utilized by the robot to discover unmodelled data, and
ask for an update of the demonstration dataset, i.e.
favours an active learning scenario, which is signif-
icant for our application, since we envision a life-
long adaptive assistive robot. Moreover, we would
like to maintain the model sparse to limit the amount
of storage and computation required, where we use
the sparse approximation presented in (Csat
´
o and Op-
per, 2002) to achieve this, which minimises the KL-
divergence between the full GP model, and one based
on a smaller dataset
2
.
1
If there exist multiple semantic components, the SOGP
classifier returns both the cluster label and the associated
semantic component with the highest score for each query
point.
2
The size of this smaller dataset refers to the capacity of the
SOGP model.
4 EXPERIMENTAL RESULTS
4.1 Overview
We employed a holonomic mobile robot to evaluate
our approach, which carries a 2D LRF to perceive the
environment. The robot was manually driven by the
human operator with a normal wireless joystick. The
average speed of the robot during the evaluations was
approximately 0.3m/s.
For the convenience of providing demonstrations
and analysing the test data, without the loss of gener-
ality of our method, in this study, we built the maps of
the involved scenarios with the state-of-art SLAM im-
plementation in ROS, and process them to extract the
required semantic components beforehand, e.g. the
center points of the candidate doorways, and the sur-
face points of the candidate objects and walls, respec-
tively.
The following evaluations were made in a post-
experimental stage. Since we are concerned with
whether the most probable semantic component es-
timated by the SOGP classifier corresponds to the
groundtruth target, we computed the rate of the cor-
rect correspondence (i.e. the correspondence rate,
or CR for short) per test trajectory, and obtained the
average of the correspondence rates (ACR for short)
over all test trajectories, to characterize the recogni-
tion performance of the SOGP classifier in the tests.
Additionally, to evaluate whether the most probable
motion cluster found by the classifier is able to ap-
propriately interpret the motion patterns of a test tra-
jectory, we computed the average dissimilarity of the
most probable task feature to all points in the assigned
motion cluster with each way point along each test
trajectory (i.e. the intra-cluster average dissimilarity,
or ICAD for short), which measures the “tightness” of
the most probable query task feature to the assigned
motion cluster. This metric is meaningful, since the
tightness of the classifications measures how well the
proposed approach interprets the motion patterns of
a test trajectory: a good interpretation of motion pat-
terns requires a low dissimilarity of the most prob-
able query point to the points in the assigned mo-
tion clusters. We used L
2
-norm as the dissimilarity
metric, and obtained the mean of ICAD (MICAD for
short) over all way points along all test trajectories,
which was utilized together with ACR to evaluate the
performance of the proposed approach. Meanwhile,
over the following evaluations post clustering, we em-
ployed the discriminative SVM classifier
3
with the SE
3
Throughout this work we use LIBSVM (Chang and Lin,
2011) for SVM training and testing.
Unsupervised Contextual Task Learning and Recognition for Sharing Autonomy to Assist Mobile Robot Teleoperation
241

kernel, to compare with the generative SOGP classi-
fier, and we chose the capacity
4
of the SOGP classifier
to be 500.
In the following evaluations, three statements will
be verified to show that the proposed approach serves
as a generic framework for representing and exploit-
ing the knowledge of the contextual task executions
from unlabelled demonstrations, in the context of as-
sisting mobile robot teleoperation by inferring the
tasks the human operator performs. First, the pro-
posed approach gives very good recognition results
on the test data sampled from the task types used
for training in an indoor scenario with multiple can-
didates, which satisfies the basic requirement for the
approach. Second, the proposed approach is general-
izable to appropriately interpret the motion patterns of
new task types not used for training. Finally and most
importantly, the proposed approach is able to detect
unknown motion patterns distinctive from those used
in the training set, due to the superior introspective ca-
pability of the SOGP classifier, which is a key prop-
erty to make the proposed approach appealing for a
life-long adaptive assistive robotic system.
4.2 Performance Evaluation with
Known Task Types
This subsection aims to evaluate the performance of
the proposed approach on recognition of the task
types used for training in an indoor scenario with mul-
tiple candidates, which is the basic criterion for the
approach.
We collected the demonstration data from per-
forming the four contextual task types: Doorway
Crossing (DC), Object Inspection (OI), Wall Follow-
ing (WF) and Object Bypass (OB), in an indoor sce-
nario with random starting poses and semantic tar-
gets respectively. The map of the scenario is shown
together with the annotated candidate semantic com-
ponents in figure 1. Totally, we obtained 12 trajec-
tories for each task type, and there were 2254 way
points for Doorway Crossing, 6286 points for Ob-
ject Inspection, 4104 points for Wall Following and
1827 points for Object Bypass, respectively. Firstly,
to show the motion clustering result qualitatively, we
employed all the collected trajectories as the train-
ing data
5
to be clustered by DPGMM, where we ran
4
This choice is to make the SOGP classifier sparser than
the SVM whose sparsity is denoted with the number of
support vectors after training, which will be shown in the
following evaluations.
5
The trajectories used as the training data were trans-
formed to the sequences of task features computed from
the groundtruth semantic components, while possessing no
Figure 1: The map of the scenario used for evaluations with
different test fractions, and the extracted semantic compo-
nents, being denoted by arrows with different colors: door-
ways (red), objects (blue), and wall segments (violet).
the inference algorithm iterating the initial number of
clusters from 1 to 100, although the clustering results
were generally consistent, we selected one with the
highest log likelihood (i.e. the evidence), to ensure
good results. Figure 2(a) displays the discovered mo-
tion clusters and the feature data assigned to them in
the form of a stacked histogram, colored by the orig-
inal task types. Moreover, we plot the feature data
with their first two components (i.e. s = (x
η
,y
η
)) on
the joint space and color them according to the orig-
inal task types and the discovered clusters in figure
2(b) and figure 2(c) respectively. As can be viewed,
a majority part of Wall Following and Object Bypass
feature data are grouped into two sides, representing
the motion patterns which are demonstrated in either
left or right side regarding the semantic targets for
the two task types respectively. Likewise, a major-
ity part of Object Inspection feature data are assigned
to two separate clusters, although not evidently illus-
trated in in figure 2(b) and figure 2(c), corresponding
physically to the situations when the robot is demon-
strated to inspect the target objects in either clock-
wise or counter-clockwise direction. Upon considera-
tion, they are reasonable distinctions, and initially not
thought of by the demonstrator. This property is key,
since it allows the DPGMM to determine action prim-
itives unknown even to the demonstrator. Meanwhile,
most motion clusters consist of a blend of feature data
from multiple task types, which represents the over-
laps of the motion patterns of them, potentially result-
ing from that the robot was always operated to firstly
align with the target, then approach it during demon-
stration. On the other hand, the split of the overlap
feature data into a series of clusters suggests that the
DPGMM is finding too many distinctions, rather than
not learning to distinguish.
Then, to quantitatively evaluate the performance
of the proposed approach, the collected dataset was
randomly split into test and training with test frac-
tions varying as 0.25, 0.5 and 0.75 based on the tra-
labels for the task types.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
242

(a) (b) (c)
Figure 2: The qualitative result of motion clustering: (a) The stacked histogram shows the discovered motion clusters and the
feature data assigned to them, colored by the original task types, please note the scale on y-axis; (b) The feature data, mapped
into 2D with their first two components and colored by the original task types; (c) The feature data, mapped into 2D with their
first two components and colored by the discovered motion clusters.
jectory number. In each test phase, the training data
were firstly clustered by DPGMM in the same way as
above. Post clustering, the SOGP classifier and the
SVM classified each way point along each test tra-
jectory with the learned motion clusters. To deter-
mine the model parameters, for SVM, we did a grid-
search on its parameters over reasonable sets, while
for SOGP classifier, we obtained the (locally) opti-
mised hyper-parameters by maximizing the evidence
of full GP via gradient-descent. The test results within
different fractions are displayed in table 1, includ-
ing the numbers of the training samples, the learned
clusters and the support vectors used by SVM, the
ACR and the MICAD of the two classifiers, respec-
tively. As can be viewed, the ACR of the SOGP clas-
sifier decreases obviously compared between the test
fraction 0.25 and 0.5, but maintains stable between
the fraction 0.5 and 0.75. The tightness measure-
ments of the SOGP classifier keep stable across the
test fractions. In general, the SOGP classifier yielded
very good recognition results even being trained with
much more clusters than the number of task types
used for demonstration. In comparison with SVM,
being confirmed by the paired T test for the mea-
surements of CR and ICAD, the SOGP classifier per-
forms considerably better than SVM in all test frac-
tions, even with a sparser representation denoted by
the capacity size of the SOGP classifier and the num-
ber of the support vectors used by SVM. This verified
that our approach is able to correctly recognize the
motion patterns it learns from the demonstrations.
4.3 Performance Evaluation with New
Task Types
Apart from recognizing the learned motion patterns,
we are also interested in whether the proposed ap-
proach is generalizable to correctly capture new task
types not used for training. Hence we collected
the test data from performing three new contextual
Figure 3: The map of the scenario used for evaluations with
three new task types, and the extracted semantic compo-
nents, being denoted by arrows with different colors: gaps
(red), the docking target under the table (green), objects
(blue), and wall segments (violet).
task types: Wall Inspection, Robot Docking
6
and
Gap Crossing for two times each with random ini-
tial poses respectively, in another cluttered indoor
scenario whose map and the corresponding seman-
tic components are illustrated in figure 3. The whole
dataset sampled in the subsection 4.2, were provided
for clustering (see figure 2) then training the SOGP
classifier and the SE SVM in the same manner, and
the datasets collected in this subsection were pre-
sented for inference. We computed the ACR and the
MICAD values of the two classifiers over all test tra-
jectories to compare their recognition performance,
which are listed in table 2, together with the numbers
of the training samples, the discovered motion clus-
ters and the support vectors used by SVM. As con-
firmed by the paired T test for the measurements of
CR and ICAD, our approach is able to recognize the
new task types with considerably better performance
on the evaluation metrics using the sparser SOGP
classifier than using the SVM.
4.4 Introspection Evaluation with
Distinctively Unknown Task Types
In real and long term applications, it is hardly possi-
ble to train the robot with all the needed task types
6
The robot was to be docked into a table.
Unsupervised Contextual Task Learning and Recognition for Sharing Autonomy to Assist Mobile Robot Teleoperation
243
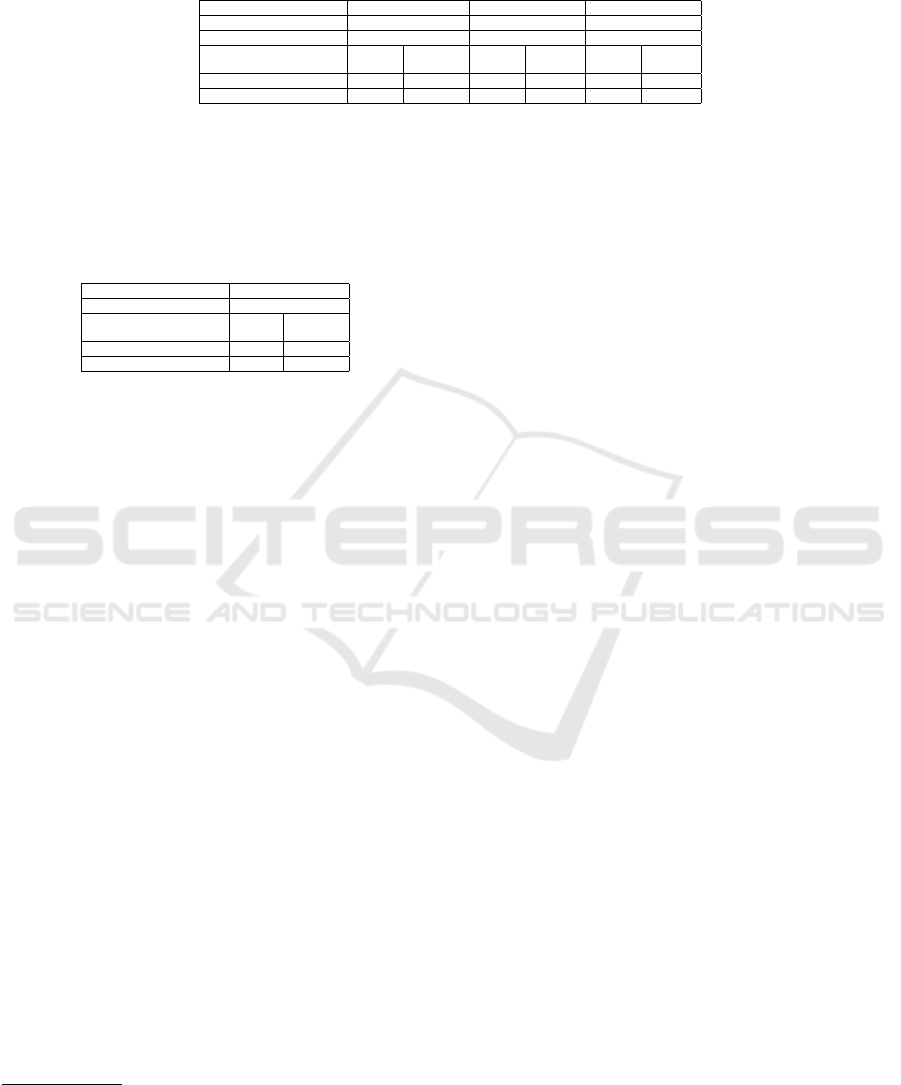
Table 1: The ACR and the MICAD comparison for the SOGP classifier and the SE SVM post clustering with varying test
data fractions, along with the numbers of the training samples and the discovered clusters. The capacity size of the SOGP
classifier and the number of support vectors used by SVM are also listed in each test fraction for comparison of the sparsity
of the two classifiers.
Experiment Test Fraction 0.25 Test Fraction 0.5 Test Fraction 0.75
No. of Training Samples 10284 7718 3540
No. of Motion Clusters 14 16 12
Classifier SOGP SVM SOGP SVM SOGP SVM
Sparsity c: 500 sv: 1894 c: 500 sv: 896 c: 500 sv: 513
ACR 0.93 0.80 0.88 0.74 0.88 0.79
MICAD 0.88 1.11 0.87 1.16 0.87 1.32
Table 2: The ACR and the MICAD comparison for the
SOGP and the SVM classifiers post clustering on test data
collected from performing three new task types, along with
the numbers of the training samples and the discovered clus-
ters. The capacity size of the SOGP classifier and the num-
ber of support vectors used by SVM are also listed for com-
parison of the sparsity of the two classifiers.
No. of Training Samples 14471
No. of Motion Clusters 18
Classifier
Sparsity
SOGP
c: 500
SVM
sv: 2723
ACR 0.82 0.74
MICAD 0.90 1.11
before deployment due to time and economic consid-
erations on one hand. On the other hand, as shown
in the previous subsection, the robot is supposed to
utilize the motion clusters to generate autonomous
motion commands, which assists the teleoperation by
fusing them with the user inputs based on the prob-
ability/confidence of the task recognition (Gao et al.,
2014), hence we would not expect that the system can
provide appropriate motion assistance to a previously
unseen motion pattern distinctive from the one used
for training, for example when it is initially trained
with Doorway Crossing and later applied to assist Ob-
ject Inspection
7
, even if the system correctly recog-
nizes the corresponding semantic targets. Therefore,
for robotic applications involving mission-critical de-
cision making, such as mobile robot teleoperation
where this report focuses, it is imperative to inves-
tigate a classifier’s capability of uncertainty estima-
tion when classifying the motion clusters for a query
task feature, i.e. the introspective capability (Grim-
mett et al., 2013) of the classifier. To characterize
the introspective capability of a classifier, we com-
pute the normalized entropy value (Grimmett et al.,
2013) for each query point based on its discrete prob-
ability distribution over the discovered motion clus-
ters. For each way point along each test trajectory
used in the following evaluations of this subsection,
we computed the task feature of a way point from
the groundtruth semantic target, and we queried the
7
Performing Doorway Crossing means to drive the robot to
simply approach the target doorway, while Object Inspec-
tion aims to not only approach the target object, but also
move around it within certain distance while facing it.
SOGP classifier and SVM with this task feature to
obtain its discrete probability distribution over the
learned motion clusters, to facilitate the computation
of the normalized entropy value of this point, for ease
of the introspection comparison of the two classifiers.
In this subsection, we used the dataset collected
in the subsection 4.2, where we arbitrarily selected
two task types for clustering then training the two
classifiers: the SOGP classifier and the SE SVM in
the same way as the subsection 4.2, and the datasets
from the other two task types were used for infer-
ence, attempting to do the introspection evaluation
with distinctive motion patterns. In order to mitigate
any influences of the specific training and test data se-
lected, we repeated such evaluation procedure across
all possible task type combinations for training, re-
sulting into six groups of the normalized entropy val-
ues. The mean and standard deviation normalized en-
tropies of each of the six test groups are listed in table
3 respectively, together with the MICAD measure-
ments of the two classifiers. As confirmed with the
paired T test, the mean normalized entropies for the
SOGP classifier are considerably higher than those of
the SVM classifier, signifying that the former exhib-
ited greater uncertainty in the judgement, indicating
strongly the presence of potentially un-modelled mo-
tion patterns, which is also suggested by the high MI-
CAD values (compared with those in the subsection
4.2) across all test iterations, while the latter was ex-
tremely confident in its classifications with lower val-
ues of the normalized entropy, even though the high
MICAD values imply a potential inappropriate inter-
pretation of the motion patterns. In practice, the robot
can utilize this outstanding introspective capability of
the SOGP classifier to actively query for an update of
the demonstration data without manual labels to in-
crease its knowledge regarding the uncertain motion
patterns, which are potentially distinctive to those al-
ready absorbed in its knowledge base. This property
is key to fulfill our vision of a life-long adaptive assis-
tive robot. How to exploit such uncertainty estimation
to interact with human (e.g. for further demonstration
via dialogue) remains our future work.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
244

Table 3: Mean and standard deviation normalized entropies
from six iterations of training and testing, where the datasets
from two task types were used for training, and the rest data
were presented for inference. The total datasets are col-
lected from performing four task types. The MICAD mea-
surements of the two classifiers in each test iteration are also
listed.
Test Task Types Classifier
Normalized Entropy
µ ± std.err.
MICAD
OI and WF
SOGP
SVM
0.703 ± 0.402
0.498 ± 0.351
1.30
1.52
OB and WF
SOGP
SVM
0.900 ± 0.232
0.151 ± 0.290
1.44
2.08
OB and OI
SOGP
SVM
0.796 ± 0.369
0.354 ± 0.215
1.52
1.56
DC and WF
SOGP
SVM
0.550 ± 0.331
0.218 ± 0.286
1.00
1.05
DC and OB
SOGP
SVM
0.535 ± 0.367
0.304 ± 0.332
1.01
1.12
DC and OI
SOGP
SVM
0.857 ± 0.271
0.641 ± 0.263
1.41
1.56
5 CONCLUSION
This paper reported an unsupervised approach for
learning and recognizing human motion patterns per-
forming various contextual task types from unla-
belled demonstrations, attempting to facilitate auton-
omy sharing to assist mobile robot teleoperation. The
motion patterns were described with a set of intu-
itive, compact and salient task features. The DPGMM
was employed to cluster the motion patterns based
on the task feature data, where the number of poten-
tial motion components was inferred from the data it-
self instead of being manually specified a priori or
estimated through model selection. Moreover, both
overlaps and distinctions of the task execution pat-
terns can be discovered through clustering, which is
used as a knowledge base for interpreting the query
patterns later on. Post clustering, the SOGP classi-
fier was used to recognize which motion pattern the
human operator executes during operation, taking ad-
vantage of its outstanding confidence estimation when
making predictions and scalability to large datasets.
Extensive evaluations were carried out in indoor sce-
narios with a holonomic mobile robot. The exper-
imental results from the real data verified that, the
proposed approach serves as a generic framework for
representing and exploiting the knowledge of the hu-
man motion patterns performing various contextual
task types without manual annotations, which is not
only able to recognize the task types seen during train-
ing, but also generalizable to appropriately interpret
the motion patters of task types not used for training,
and more importantly, the proposed approach is capa-
ble of detecting unknown motion patterns distinctive
from those used in the training set, due to the superior
introspective capability of the SOGP classifier, hence
provides a significant step towards a life-long adap-
tive assistive robot.
REFERENCES
Blei, D. M., Jordan, M. I., et al. (2006). Variational infer-
ence for dirichlet process mixtures. Bayesian analysis,
1(1):121–143.
Chang, C.-C. and Lin, C.-J. (2011). Libsvm: a library for
support vector machines. ACM Transactions on Intel-
ligent Systems and Technology (TIST), 2(3):27.
Csat
´
o, L. and Opper, M. (2002). Sparse on-line gaussian
processes. Neural computation, 14(3):641–668.
Dragan, A. and Srinivasa, S. (2012). Formalizing assistive
teleoperation. R: SS.
Fong, T., Thorpe, C., and Baur, C. (2001). Advanced inter-
faces for vehicle teleoperation: Collaborative control,
sensor fusion displays, and remote driving tools. Au-
tonomous Robots, pages 77–85.
Gao, M., Oberl
¨
ander, J., Schamm, T., and Z
¨
ollner, J. M.
(2014). Contextual Task-Aware Shared Autonomy for
Assistive Mobile Robot Teleoperation. In Intelligent
Robots and Systems (IROS), 2014 IEEE/RSJ Interna-
tional Conference on. IEEE.
Gao, M., Schamm, T., and Z
¨
ollner, J. M. (2016). Contex-
tual Task Recognition to Assist Mobile Robot Teleop-
eration with Introspective Estimation using Gaussian
Process. In Autonomous Robot Systems and Compe-
titions (ARSC), 2016 IEEE International Conference
on. IEEE.
Grimmett, H., Paul, R., Triebel, R., and Posner, I. (2013).
Knowing when we don’t know: Introspective clas-
sification for mission-critical decision making. In
Robotics and Automation (ICRA), 2013 IEEE Inter-
national Conference on, pages 4531–4538. IEEE.
Hauser, K. (2013). Recognition, prediction, and plan-
ning for assisted teleoperation of freeform tasks. Au-
tonomous Robots, 35(4):241–254.
Hughes, M. C. and Sudderth, E. (2013). Memoized on-
line variational inference for dirichlet process mixture
models. In Advances in Neural Information Process-
ing Systems, pages 1133–1141.
Okada, Y., Nagatani, K., Yoshida, K., Tadokoro, S.,
Yoshida, T., and Koyanagi, E. (2011). Shared au-
tonomy system for tracked vehicles on rough terrain
based on continuous three-dimensional terrain scan-
ning. Journal of Field Robotics, 28(6):875–893.
Sa, I., Hrabar, S., and Corke, P. (2015). Inspection of pole-
like structures using a visual-inertial aided vtol plat-
form with shared autonomy. Sensors, 15(9):22003–
22048.
Sheridan, T. B. (1992). Telerobotics, automation and human
supervisory control. The MIT press.
Stefanov, N., Peer, A., and Buss, M. (2010). Online in-
tention recognition in computer-assisted teleoperation
systems. In Haptics: Generating and Perceiving Tan-
gible Sensations, pages 233–239. Springer.
Unsupervised Contextual Task Learning and Recognition for Sharing Autonomy to Assist Mobile Robot Teleoperation
245
