
3D Object Categorization and Recognition based on Deep Belief
Networks and Point Clouds
Fatima Zahra Ouadiay, Nabila Zrira, El Houssine Bouyakhf and M. Majid Himmi
LIMIARF, Faculty of Sciences, Mohammed V University, Rabat, Morocco
Keywords:
Real 3D Object Recognition, Categorization, Deep Belief Network, PCL, 3D SIFT, SHOT, CSHOT.
Abstract:
3D object recognition and categorization are an important problem in computer vision field. Indeed, this is
an area that allows many applications in diverse real problems as robotics, aerospace, automotive industry
and food industry. Our contribution focuses on real 3D object recognition and categorization using the Deep
Belief Networks method (DBN). We extract descriptors from cloud keypoints, then we train the resulting
vectors with DBN. We evaluate the performance of this contribution on two datasets, Washington RGB-D
object dataset and our own real 3D object dataset. The second one is built from real objects, following the
same acquisition conditions than those used for Washington dataset acquisition. By this proposed approach, a
DBN could be designed to treat the high-level features for real 3D object recognition and categorization. The
experiment results on standard dataset show that our method outperforms the state-of-the-art used in the 3D
object recognition and categorization.
1 INTRODUCTION
We live in a 3D world. We can recognize and name an
object without any difficulty. The specific knowledge
stored in a brain, allow us to compare the information
of the object presented in the scene with those stored
to detect and recognize the object without any ambi-
guity.
In the field of robotics, to apply this principle
of vision and develop the object manipulation as-
pect in the Human-Machine Interaction (HMI), re-
searchers have developed some algorithms that pro-
vide the steps of human vision procedure. The most
popular methods are: the extraction of information
from scenes by using some detectors/descriptors algo-
rithm such as (SIFT, SURF, ORB, ect) (Lowe, 1999),
(Bay et al., 2006).
Several works have been developed in this area,
especially with introduction of 3D Library as PCL in
2012 (Aldoma et al., 2012). The most of the work
must use the large database of several perspective 3D
objects.
Recently, the robotic researchers seek to integrate
machine learning methods for robotic tasks. The
methods that are based on deep learning (Bengio,
2009) demonstrated the performance of state-of-the-
art in a wide variety of tasks, including visual recog-
nition (Le, 2013), natural language processing (Col-
lobert et al., 2011), and the speech recognition (Hin-
ton et al., 2012). These techniques are particularly
powerful because they can learn useful features di-
rectly from unlabeled and labeled data, eliminating
the need for hand-engineering. However, most of
the works in deep learning were in pedestrian detec-
tion (Sermanet et al., 2013). The offered approaches
on the object recognition still require a dataset as a
basis for references or for tests. Some Researchers
consrtuct their object data to assess their methods as
Liang (Liang et al., 2014) and Yu (Yu et al., 2013).
Some others used one of the popular datasets that are
available for public by other researchers as Scwarz
(Schwarz et al., 2015) and Alexandre (Alexandre,
2016a). NORB (Nair and Hinton, 2009a). Washing-
ton RGB-D dataset (Lai et al., 2011a) is an another
data which is the most used, because it has a very
wide selection (categories and instances) of real ob-
jects of interior environment.
Our goal in this paper is to propose an object cat-
egorization and recognition approach using Deep be-
lief network (DBN) in the robotic gripper problem in
a way that could be generalized to similar problems
of detection and recognition. The main objective is
to recognize the target object in the scene based on
the specific characteristics that identify the class to
which it belongs. We test our approach on different
types of dataset, firstly on reference dataset (Washing-
Ouadiay, F., Zrira, N., Bouyakhf, E. and Himmi, M.
3D Object Categorization and Recognition based on Deep Belief Networks and Point Clouds.
DOI: 10.5220/0005979503110318
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 311-318
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
311

ton RGB-D object dataset) and secondly on our own
real 3D object dataset. Our 3D acquisition system is
presented in section 4.2 to validate generally and in
real manner the proposed method. These experiments
can show that our method improves the performance
of categorization and recognition to manipulate any
object.
The rest of the paper is organized as follows:
We describe related work in Section II. Section III,
presents our contribution, and some additional details
for each step of contribution. In Section IV, we illus-
trate the datasets. Feature extraction is introduced in
section V. Then we describe our learning algorithm
feature DBN in Section VI. We present the experi-
ments and results in the Section VII. We close with
several interesting directions for future work and con-
clude this work in Section VIII.
2 RELATED WORK
Recently, researchers have been interested in 3D ob-
ject recognition due to the development of RGB-
D cameras that provide a high quality synchronized
depth and color data. In (Bo et al., 2011), the authors
develop a set of kernel features over depth maps that
model 3D shape, size, and depth edges. The main
match kernel framework defines pixel attributes, de-
signs match kernels in order to measure the similar-
ities of image patches, then determines low dimen-
sional match kernels. In (Savarese and Fei-Fei, 2007),
authors suggest a compact model of 3D object cate-
gory based on appearance and 3D geometric shape.
Each object is considered as a linked set of parts that
are composed of many local invariant features. The
approach can classify, localize and infer the scale as
well as the pose estimation of objects in the image. In
(Toldo et al., 2009), authors introduce Bag of Words
(BoW) approach for 3D object categorization. Spec-
tral clustering is used to select seed-regions, followed
by hierarchical clustering at each level for region de-
scriptors in order to obtain BoW histograms for each
mesh. Finally, Support Vector Machine (SVM) is
learnt to classify different BoW histograms for 3D ob-
jects. In (Lai et al., 2011b), the authors describe the
dataset collection steps and propose methods to rec-
ognize and detect RGB-D objects. They use spin im-
age descriptor to extract shape features that are used
for computing efficient match kernel (EKM). They
use also SIFT descriptor to extract visual features. Fi-
nally, linear support vector (LiSVM), gaussian kernel
support vector machine (kSVM) and random forest
(RF) are learnt to classify both color and depth in-
formations. In (Nair and Hinton, 2009b), a new 3D
object recognition approach is proposed and tested on
NORB database. The dimensionality for each stereo-
pair image is reduced by using a foveal image. The
final representation is equal to 8976 dimensional vec-
tors that are learnt with a top-level model for Deep
Belief Nets (DBN). This model is a third-order Boltz-
mann machine which is trained using a hybrid al-
gorithm that combines both generative and discrim-
inative gradients. The first convolutional-recursive
deep learning model is introduced in (Socher et al.,
2012) for 3D object recognition. The authors com-
pute a single CNN layer to extract low level features
from both RGB and depth images. These representa-
tions are given as input to a set of RNNs with ran-
dom weights. The concatenation of all the result-
ing vectors forms the final feature vector for a soft-
max classifier. In (Alexandre, 2016b), author pro-
pose a new approach for RGB-D object classification.
He uses four independent Convolutional Neural Net-
works (CNNs), one for each channel, then train these
CNNs in a sequence. The authors of (Schwarz et al.,
2015), provide a meaningful feature set that results
from the pre-trained stage of Convolutional Neural
Network (CNN). Then, they incorporate depth infor-
mation which is not trained with CNN. Depth and
RGB images are processed independently by CNN
and the resulting features are used to determine cat-
egory, instance and pose of the object.
Our work focuses on 3D object representation as
well as recognition and categorization using 3D PCL
descriptors and Deep Belief Networks (DBNs). We
extract 3D keypoints with 3D SIFT detector which are
described using SHOT and CSHOT descriptors. Re-
sulting vectors are learnt using Deep Belief Networks
(DBNs) classifier.
3 OVERVIEW OF OUR
CONTRIBUTION
In this article, we propose a new system that can clas-
sify and recognize objects. The most works, that are
done on object recognition based on machine learning
methods, test their methods using testing and training
sets from the same dataset. We also evaluate the ex-
periment on a real object dataset in order to prove the
approach validation in any indoor environment. To
the best of our knowledge, this study is the first to do.
To improve the capacity of recognition and cat-
egorization methods, we propose to focus feature
learning using Deep Belief Network. We train only
the most interesting points of the point cloud that rep-
resents the sought object. For that, we introduce a pre-
processing step to extract keypoints by the 3D SIFT
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
312

Figure 1: An overview of our model: from the input data,
we describe keypoins extracted by 3D SIFT with SHOT and
CSHOT, after this step, the objects are ready for DBN pro-
cess.
detector which gives the best results on several papers
(Alexandre, 2012). Then, the approach can identify
the significant features using the best descriptors in
terms of time computing and recognition rates SHOT
and SHOTcolor (CSHOT).
Figure 1 gives an overview of our approach. To
use a DBN, the data of object must be carefully pre-
pared. The input dataset must be segmented and fil-
tered to reduce parasitic elements that appear during
real time object acquisition.
The Washignton RGB-D dataset is already seg-
mented, however we ameliorate the quality of our ac-
quired data with the Meshlab software that was de-
veloped in the Visual Computing laboratory. It im-
plements a wide range of algorithms and filters that
improve the reconstruction of 3D models. After this
step, the objects are ready for preprocessing. The fea-
tures contained in the point clouds are picked by order
of importance using the 3D SIFT detector. The key-
points chosen by SIFT detector are identified by the
SHOT and CSHOT descriptors to evaluate the influ-
ence of color information. The descriptors are then
adjusted to the input distribution of the DBN network
to predict the object class.
In summary, our major contributions are as fol-
lows:
• We introduce a novel pipeline for RGB-D ob-
ject recognition and categorization that combines
point clouds processing and DBN;
• We pick and analyze the important point be-
fore learning the DBN with 3D SIFT and
SHOT/CSHOT descriptors;
• We demonstrate the validation of our approach on
two datasets:
1. Washington dataset is used for recognition test:
each class contains different views of the same
object;
2. Washington dataset is used for categorization
test: each category contains three instances of
object.
• Finally, we demonstrate that our method improves
the recognition rate compared to other methods.
4 DATASET
Two sets of 3D indoor object data are used to evaluate
the proposed approach for object recognition and cat-
egorization. The first one is the large famous Wash-
ington RGB-D dataset represented in figure 2, which
is used for the training data of both experiments. The
second one is used for the testing in the recognition
model with real objects. It is our own dataset repre-
sented in figure 4 that is acquired in the same condi-
tions as Washington dataset using our reconstruction
system equipped with the RGBDemo software.
4.1 Washignton RGB-D Dataset
We use a subset of the RGB-D washington dataset
from (Lai et al., 2011a), this data contains 300 objects
that are organized into 51 categories.
For the recognition test, we use 10 classes of ob-
jects, each class contains different clouds of the same
object captured from different points of view.
For the categorization test, we use the same
classes of objects, each category contains three differ-
ent instances (example: the apple category contains
green, red and yellow apples).
Figure 2: The ten object classes used in our experiments
from Washington RGB-D dataset (apple(1), bowl(2), cal-
culator(3), cellphone(4), coffee-mug(5), tomato(6), food-
bag(7), food-box(8), marker(9), notebook(10)).
4.2 Our Real RGB-D Dataset
The 3D acquisition system of 3D object models aims
to gather and represent the information associated
with a real-world object using multiple views as cap-
tured by Kinect.
The main purpose is to build a rotating support
while keeping the Kinect camera fixed.
The system consists of Kinect camera, software
and hardware parts:
The hardware is composed of rotating support that
3D Object Categorization and Recognition based on Deep Belief Networks and Point Clouds
313

Figure 3: The 3D acquisition system contains: Kinect cam-
era, RGBDemo software and rotating support commanded
by arduino Kit.
consists of four fiducial markers aligned at fixed po-
sitions to form a rectangular shape. The board is ac-
tuated by a precise motor, so that we know the pose
of the object at each Kinect frame. We use a stepper
motor to achieve very precise positioning and speed
control. For the precision motion, the stepper motor
is maintained using Arduino Kit and Adafruit Motor
Shield.
The software is RGBDemo that provides a simple
toolkit to start fusion with Kinect data and develop
standalone computer vision programs. The project
consists of a library called nestk, which is designed
to easily integrate into existing cmake-based software
and provides quick access to the Kinect features. It
includes OpenCV for image processing, QT for the
graphical parts, libfreenect for Kinect, and PCL li-
brary. The main idea of the demonstration is to build
a 3D model for real-world objects using open source
Aruco library (BSD licenced), that is able to generate
and recognize square markers, issue the ID and the
corner cordinates of each detected marker.
To generate the viewpoints in the same condition
us whashington dataset, in figure 3 we fix the kinect’s
position during the movement of the support, and it’s
placed about one meter from the turntable (the mini-
mum distance required for the RGB-D camera to re-
turn reliable depth readings) in order to ensure a con-
stant illumination and avoid the risk of having desyn-
chronized depth and color images. For each class,
we take maximum data to have an extensive object
views in 360
◦
, with the camera mounted at differ-
ent heights relative to the rotating support at approxi-
mately between [30
◦
,60
◦
] to validate the approach in-
dependently regardless of view angles.
5 FEATURE EXTRACTION
5.1 3D Sift Detector
Scale-invariant feature transform (SIFT) is an algo-
Figure 4: The object classes (tomato,lemon,coffee-
mug,bowl,notebook) from our acquired RGB-D dataset: 2D
presentation (in down), point cloud (in top).
rithm deployed in the field of computer vision to
detect and describe regions in an image and iden-
tify similar elements between varying images called
matching. The algorithm consists of the detected fea-
ture points of an image used to characterize every
point that needs to be recognized by comparing its
characteristics with those of the points contained in
other images. The general idea of SIFT is to find
the keypoints that are invariant to several transforma-
tions/changes: rotation, scale, illumination and view-
ing angle. The 3D SIFT detector (Lowe, 1999) use the
Difference-of-Gaussian (DoG) function to extract the
extrema points in both spatial and scale dimensions.
5.2 SHOT/CSHOT Descriptors
The SHOT (Signature of Histograms of Orientations),
proposed by Tombari and al. in (Tombari et al., 2010),
(Tombari et al., 2011) is a descriptor based on the his-
tograms of normal. It is established from the inter-
section between signatures and histograms, so as to
achieve a better balance between the descriptive char-
acter and the robustness. In addition, it presents the
descriptive power of the 3D shape of the surface that
was repeatable and robust to noise, translations, and
rotations. It presents an enormous gain in comput-
ing time. The description of the geometrical informa-
tion about the point positions contained in a support
is made by a set of local 3D histograms defined on a
3D spherical grid that partitions the space according
to the radial axes, azimuth, and elevation. For each
sector of the grid the values of the cosine of angles
between the normal reference and all these neighbors
are accumulated to form the normal histogram with
32 bins. The estimation of the normal is made by
calculating a new covariance matrix as linear combi-
nation of the distances of the points belonging to a
spherical support of the keypoints. The eigenvectors
of this matrix from orthogonal directions are repeat-
able and robust to noise. It is possible to improve the
discriminating power of the descriptor by introduc-
ing geometrical information concerning the location
of points inside the support, in order to obtain a sig-
nature. It makes by calculating a first set of local his-
tograms on 3D volumes defined by a 3D grid overlaid
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
314
on the support and then grouping all local histograms
to form the resulting descriptor.
More recently, SHOTCOLOR (CSHOT) version
combines SHOT information on the shape, texture
and colors. This descriptor is a combination of a nor-
mal histogram and a color one. The color histogram
is formed by RGB absolute values between the refer-
ence point and their neighboring ones.
6 DEEP BELIEF NETWORKS
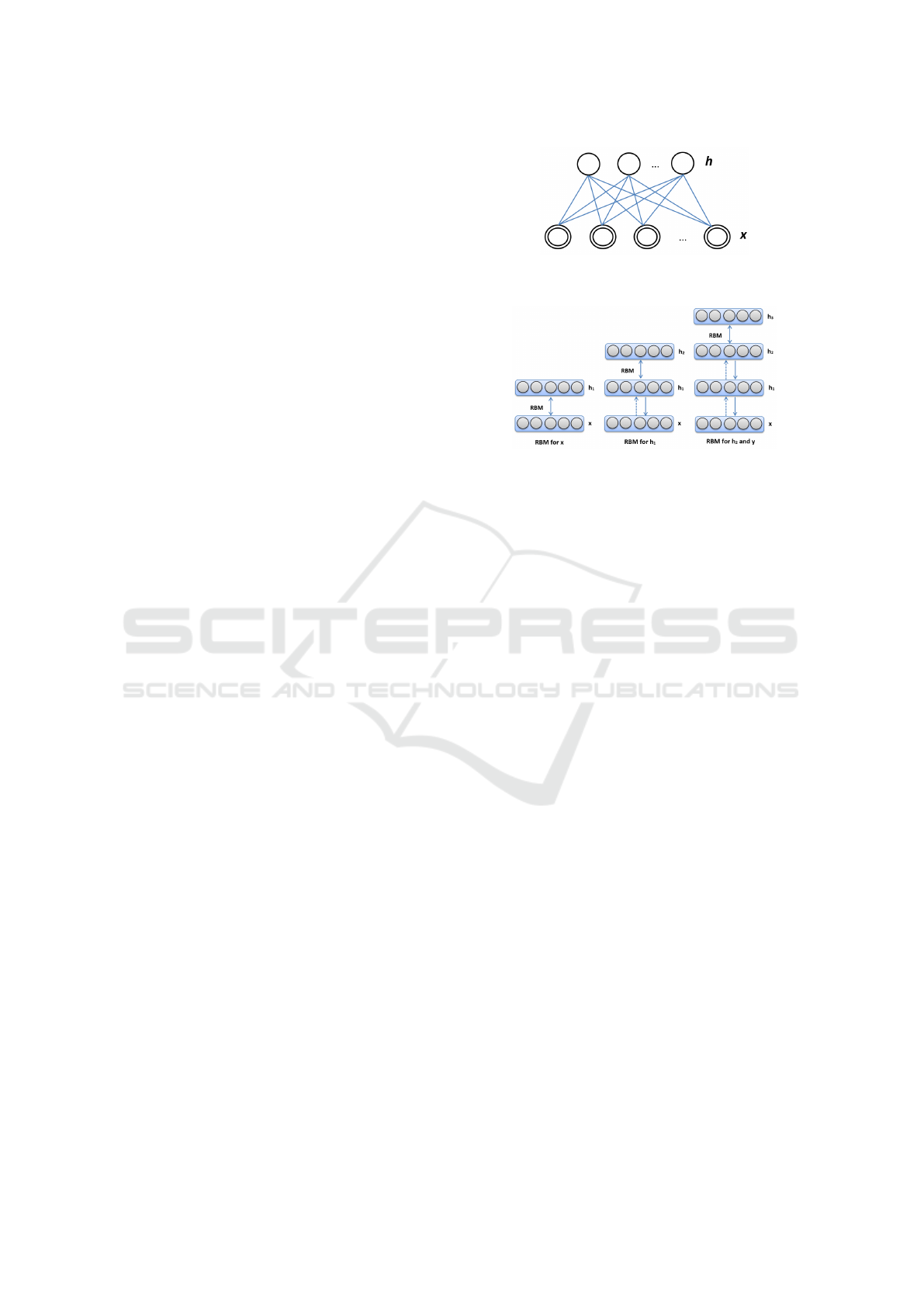
6.1 Restricted Boltzmann Machines
Restricted Boltzmann machines (RBMs) (Smolensky,
1986) are a particular type of energy-based model
with hidden variables. They are restricted in the sense
that no variable-variable or hidden-hidden connec-
tions exist. As shown in Figure 5, RBMs are undi-
rected graphical models that are composed of two lay-
ers:
1. The first layer: it contains visible units (x) that
correspond to the components of an observation
(i.e. SHOT/CSHOT descriptors in this case of
study);
2. The second layer: it contains hidden units (h) that
model dependencies between the components of
observations.
The energy function of an RBM is defined as:
E(x, h) = −b
0
x − c
0
h − h
0
W x (1)
where:
• W : represents the symmetric interaction term be-
tween visible units (x) and hidden units (h);
• a and b : are vectors that store the visible (input)
and hidden biases (respectively).
Then, we introduce the notation (inspired from
physics) of free energy in order to marginalize en-
ergies in the log-domain. The following free energy
formula can be written as follows:
F(x) = −b
0
x −
∑
i
log
∑
h
i
e
h
i
(c
i
+W
i
x)
(2)
RBMs have received a lot of attention recently af-
ter being proposed as building blocks of multi-layer
learning architectures called deep belief networks.
The idea is that the hidden neurons extract relevant
features from the observations. These features can
serve as input to another RBM. By stacking RBMs
in this way, one can learn features from features in
the hope of arriving at a high level representation.
Figure 5: RBM models. The joints between hidden units
and also between visible units are disconnected.
Figure 6: DBN framework: three hidden layers h1, h2, h3
and one visible layer x.
6.2 Deep Belief Networks
Deep Belief Networks (DBNs) are probabilistic gen-
erative models with many layers of stochastic and hid-
den variables (Deng and Yu, 2014). In (Hinton et al.,
2006), the authors introduce the motivation for using
a deep network versus a single hidden layer (i.e. a
DBN vs an RBM). The power of deep networks is
achieved by having more hidden layers.
The DBN architecture is composed of the top two
layers that are undirected with symmetric connections
between them. This block represents a probabilis-
tic model called a Restricted Boltzmann Machine.
Whereas the lower layers are directed connections
from the layer above. Figure 6 shows typical DBN
with one input layer (x) and three hidden layers h1,h2
and h3. In the first stage of DBN training processes,
each pair of layers grouped together to reconstruct the
input of the layer from the output. The layer-wise re-
construction happens between x and h1, h1 and h2, h2
and h3, respectively, which is implemented by a fam-
ily of RBMs. After the greedy unsupervised learning
of each pair of layers, the features are progressively
combined from loose low-level representations into
more compact high-level representations. In the sec-
ond stage, the whole deep network is then refined us-
ing a contrastive version of the wake-sleep algorithm
via a global gradient-based optimization strategy.
7 RESULTS AND DISCUSSION
In this section, we tested our 3D recognition and cat-
egorization approaches on both Washington RGB-D
3D Object Categorization and Recognition based on Deep Belief Networks and Point Clouds
315

as well as our real RGB-D datasets. The training and
testing point clouds are computed using a Xeon(R)
3.50 GHz CPU 32 Go RAM K2000 Nvidia card on
Ubuntu 14.04. DBN aims to allow each RBM model
in the sequence to receive a different representation of
the data. In other words, after RBM has been learned,
the activity values of its hidden units are used as the
training data for learning a higher-level RBM.
In this work, we use the SHOT/CSHOT descrip-
tors to extract features from point clouds, which are
considered as the input layer x of DBN architecture
in figure 6. The input layer has a number N of units,
equal to the size of sample data x (352 for Shot and
1344 for ShotColor) . The number of units for hidden
layers, currently, are pre-defined according to the ex-
periment. We fixed DBN with two hidden layers h1
and h2. The general DBN characteristics are shown
in Table 1.
Table 1: DBN characteristics that are used in our experi-
ment.
Characteristic Value
Hidden layers 2
Hidden layer units 600
Learn rates 0.3
Learn rate decays 0.9
Epochs 50
Verbose 1
Input layer units size of descriptor
7.1 3D Object Recognition
In this sub-section, we evaluate the performance of
3D object recognition system on Washington RGB-
D data with classes (apple(1), bowl(2), calculator(3),
cellphone(4), coffee-mug(5), tomato(6), food-bag(7),
food-box(8), marker(9), notebook(10)) and our real
RGB-D dataset. We use a DBN with two hidden lay-
ers. Then, we train the weights of each layer sepa-
rately with the fixed number of epochs equal to 50.
The approach trains RBMs one after another and uses
their resulting training data for training stage in the
next RBM.
7.1.1 Washington RGB-D Dataset
Table 2 shows the results of 3D object recogni-
tion approach that utilizes the SHOT descriptor for
describing 3D keypoints. We remark that the ap-
proach can confuse some objects which seem simi-
lar (i.e.calculator(3)/cell phone(4), food-box(7)/food-
bag(8)). This result is due to the similarity between
some object views. Indeed, the very thin side of cell
phone could be considered as a thin side of calcula-
tor. They are very similar because both contain the
keybord. It shows also the results of 3D object recog-
nition approach using CSHOT descriptor. It is very
obvious that when we add RGB information to depth
data, the recognition accuracy increases. In this case,
our approach is more consistent and can not confuse
the objects. As shown in Table 4, our approach out-
performs all methods that are mentioned in state-of-
the-art. The uses of CSHOT descriptor works per-
fectly with accuracy rate of 99.7% on Washington
RGB-D dataset.
7.1.2 Our Real RGB-D Dataset
The aim of our contribution is to exploit 3D object
recognition and categorization approach in real-time
applications. For this purpose, we constructed our
own database from our real objects. We collect four
class types (bowl, coffe-mug, tomato and notebook)
which are present on Washington RGB-D dataset.
Table 5 shows results on our real-world environ-
ment. We remark that the accuracy of our approach
using just depth information is better than the one
which combines depth and RGB informations (color).
This result is evident because in this experiment, we
used Washington RGB-D dataset for training stage,
while in the testing stage, we used our real objects.
So, when objects (test and these in reference class)
have the same shapes but color informations are very
different. However, the uses of depth only, allow to
the system to give a good recognition.
7.2 3D Object Categorization
In this sub-section, we tested 3D categorization ap-
proach on Washington RGB-D dataset. Each cate-
gory, contains three instances of objects. Similarly
to above approach, we first test our approach using
SHOT descriptor then we add RGB informations.
Table 3 (left) illustrates the results of 3D ob-
ject categorization using depth information. Our ap-
proach can confuse some objects that have the similar
shapes (apple(1)/tomato(6), cell-phone(4)/marker(9)
and calculator(3)/cell phone(4)), and between (food-
box(8)/food-bag(7). When we add RGB information,
our approach confuse just some objects who have the
similar view angles,(calculator(3) and cell-phone(4))
(see table 3 (right)).
Table 6 demonstrates that our approach outper-
forms all state-of-the-art methods in both depth and
depth with RGB informations.
In general, we can conclude that our approach of
3D object recognition and categorization outperforms
all state-of-the-art methods. The RGB informations
have an important impact on accuracy results.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
316
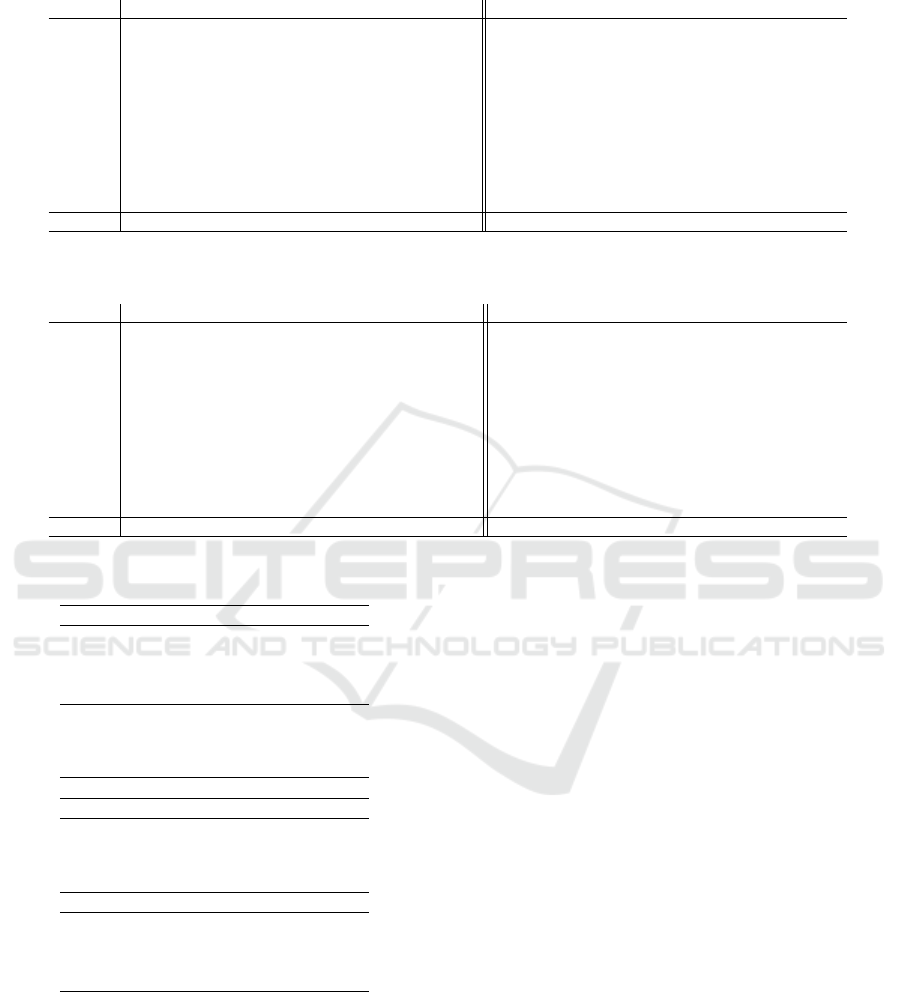
Table 2: Performance of 3D object recognition approach using various descriptors SHOT/SHOTCOLOR tested on Washington
RGB-D dataset. We use 3D SIFT to extract features (obj/c: number of objects in each test class).
Classes SHOT CSHOT
obj/c TP FN wrong class recall precision obj/c TP FN wrong class recall precision
(1) 207 207 0 – 100% 100% 224 244 0 – 100% 100%
(2) 183 183 0 – 100% 100% 211 211 0 – 100% 100%
(3) 200 188 12 (4) 94% 92% 196 193 0 – 98% 100%
(4) 184 164 20 (3) 89% 99% 155 154 1 (3) 99% 99%
(5) 186 186 0 – 100% 100% 189 189 0 – 100% 99%
(6) 212 212 0 – 100% 100% 211 211 0 – 100% 100%
(7) 256 255 1 (8) 100% 99% 250 250 0 – 100% 100%
(8) 249 249 0 – 100% 100% 250 250 0 – 100% 99%
(9) 269 269 0 – 100% 96% 250 250 0 – 100% 100%
(10) 267 267 0 – 100% 100% 277 277 0 – 100% 100%
Average – – – – 98.8% 98.6% – – – – 99.7% 99.7%
Table 3: Performance of 3D object categorization approach using various descriptors SHOT/SHOTCOLOR tested on Wash-
ington RGB-D dataset. We use 3D SIFT to extract features (obj/c: number of objects in each test class).
Classes SHOT CSHOT
obj/c TP FN wrong class recall precision obj/c TP FN wrong class recall precision
(1) 207 192 15 (6) 93% 99% 203 203 0 – 100% 100%
(2) 197 197 0 – 100% 100% 188 188 0 – 100% 100%
(3) 204 201 3 (4) 99% 93% 188 188 0 – 97% 100%
(4) 188 168 20 (3) 89% 97% 181 167 14 (3) 95% 92%
(5) 186 186 0 – 100% 100% 191 191 0 – 100% 100%
(6) 197 195 2 (1) 99% 92% 213 213 0 – 100% 100%
(7) 188 179 9 (8) 95% 100% 218 218 0 – 100% 100%
(8) 194 190 4 (7) 98% 99% 184 184 0 – 100% 100%
(9) 213 210 3 (4),(3) 99% 95% 198 194 4 (4),(3) 98% 98%
(10) 201 201 0 – 100% 98% 211 211 0 – 100% 100%
Average – – – – 97.2% 97.3% – – – – 99% 99%
Table 4: Comparison 3D object recognition accuracies on
the Washington RGB-D Objects dataset.
Approach Depth RGB-D
(Lai et al., 2011a) 51.2% 90.6%
(Bo et al., 2011) 54.3% 84.5%
(Schwarz et al., 2015) – 94.1%
Our 98.6% 99.7%
Table 5: 3D object recognition accuracies on our real RGB-
D objects dataset.
Approach Depth RGB-D
Real RGB-D dataset 72% 54%
Table 6: Comparison 3D object categorization accuracies
on the Washington RGB-D Objects dataset.
Approach Depth RGB-D
(Lai et al., 2011a) 64.7% 83.8%
(Bo et al., 2011) 78.8% 86.2%
(Schwarz et al., 2015) – 89.4%
Our 97.3% 99%
8 CONCLUSIONS AND
OUTLOOK
In this paper, we focused on 3D object recognition
and categorization using 3D local features which are
extracted from PCL descriptors. These features are
learned with Deep Belief Netwroks (DBNs) classi-
fier that are based on Restricted Boltzmann machine
(RBM).
We tested our approach on both RGD-B Washing-
ton dataset as well as our real-world 3D objects. The
experimental results are encouraging, especially that
our approach is able to recognize and categorize 3D
objects under different views.
In future work, we will try to expand our 3D real
object data in order to put it available to researchers,
then to integrate our algorithm after having improved
it in a mobile robot so that, recognize, locate and
manipulate objects in real time. We will also com-
pare our approach with the overall characteristics and
CNN architecture.
REFERENCES
Aldoma, A., Marton, Z.-C., Tombari, F., Wohlkinger, W.,
Potthast, C., Zeisl, B., Rusu, R. B., Gedikli, S., and
Vincze, M. (2012). Point cloud library. IEEE Robotics
& Automation Magazine, 1070(9932/12).
Alexandre, L. A. (2012). 3d descriptors for object and cate-
gory recognition: a comparative evaluation. In Work-
shop on Color-Depth Camera Fusion in Robotics at
the IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), Vilamoura, Portugal, vol-
ume 1, page 7. Citeseer.
3D Object Categorization and Recognition based on Deep Belief Networks and Point Clouds
317

Alexandre, L. A. (2016a). 3d object recognition using con-
volutional neural networks with transfer learning be-
tween input channels. In Intelligent Autonomous Sys-
tems 13, pages 889–898. Springer.
Alexandre, L. A. (2016b). 3d object recognition using con-
volutional neural networks with transfer learning be-
tween input channels. In Intelligent Autonomous Sys-
tems 13, pages 889–898. Springer.
Bay, H., Tuytelaars, T., and Van Gool, L. (2006). Surf:
Speeded up robust features. In Computer vision–
ECCV 2006, pages 404–417. Springer.
Bengio, Y. (2009). Learning deep architectures for ai. Foun-
dations and trends
R
in Machine Learning, 2(1):1–
127.
Bo, L., Ren, X., and Fox, D. (2011). Depth kernel descrip-
tors for object recognition. In Intelligent Robots and
Systems (IROS), 2011 IEEE/RSJ International Con-
ference on, pages 821–826. IEEE.
Collobert, R., Weston, J., Bottou, L., Karlen, M.,
Kavukcuoglu, K., and Kuksa, P. (2011). Natural lan-
guage processing (almost) from scratch. The Journal
of Machine Learning Research, 12:2493–2537.
Deng, L. and Yu, D. (2014). Deep learning: Methods and
applications. Foundations and Trends in Signal Pro-
cessing, 7(3–4):197–387.
Hinton, G., Deng, L., Yu, D., Dahl, G. E., Mohamed, A.-
r., Jaitly, N., Senior, A., Vanhoucke, V., Nguyen, P.,
Sainath, T. N., et al. (2012). Deep neural networks for
acoustic modeling in speech recognition: The shared
views of four research groups. Signal Processing
Magazine, IEEE, 29(6):82–97.
Hinton, G. E., Osindero, S., and Teh, Y.-W. (2006). A fast
learning algorithm for deep belief nets. Neural com-
putation, 18(7):1527–1554.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011a). A large-
scale hierarchical multi-view rgb-d object dataset. In
Robotics and Automation (ICRA), 2011 IEEE Interna-
tional Conference on, pages 1817–1824. IEEE.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011b). A large-
scale hierarchical multi-view rgb-d object dataset. In
Robotics and Automation (ICRA), 2011 IEEE Interna-
tional Conference on, pages 1817–1824. IEEE.
Le, Q. V. (2013). Building high-level features using large
scale unsupervised learning. In Acoustics, Speech and
Signal Processing (ICASSP), 2013 IEEE International
Conference on, pages 8595–8598. IEEE.
Liang, D., Weng, K., Wang, C., Liang, G., Chen, H., and
Wu, X. (2014). A 3d object recognition and pose es-
timation system using deep learning method. In In-
formation Science and Technology (ICIST), 2014 4th
IEEE International Conference on, pages 401–404.
IEEE.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Computer vision, 1999. The pro-
ceedings of the seventh IEEE international conference
on, volume 2, pages 1150–1157. Ieee.
Nair, V. and Hinton, G. E. (2009a). 3d object recognition
with deep belief nets. In Advances in Neural Informa-
tion Processing Systems, pages 1339–1347.
Nair, V. and Hinton, G. E. (2009b). 3d object recognition
with deep belief nets. In Advances in Neural Informa-
tion Processing Systems, pages 1339–1347.
Savarese, S. and Fei-Fei, L. (2007). 3d generic object cate-
gorization, localization and pose estimation. In Com-
puter Vision, 2007. ICCV 2007. IEEE 11th Interna-
tional Conference on, pages 1–8. IEEE.
Schwarz, M., Schulz, H., and Behnke, S. (2015). Rgb-
d object recognition and pose estimation based on
pre-trained convolutional neural network features. In
Robotics and Automation (ICRA), 2015 IEEE Interna-
tional Conference on, pages 1329–1335. IEEE.
Sermanet, P., Kavukcuoglu, K., Chintala, S., and LeCun, Y.
(2013). Pedestrian detection with unsupervised multi-
stage feature learning. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 3626–3633.
Smolensky, P. (1986). Information processing in dynamical
systems: Foundations of harmony theory.
Socher, R., Huval, B., Bath, B., Manning, C. D., and Ng,
A. Y. (2012). Convolutional-recursive deep learning
for 3d object classification. In Advances in Neural
Information Processing Systems, pages 665–673.
Toldo, R., Castellani, U., and Fusiello, A. (2009). A bag of
words approach for 3d object categorization. In Com-
puter Vision/Computer Graphics CollaborationTech-
niques, pages 116–127. Springer.
Tombari, F., Salti, S., and Di Stefano, L. (2010). Unique
signatures of histograms for local surface descrip-
tion. In Computer Vision–ECCV 2010, pages 356–
369. Springer.
Tombari, F., Salti, S., and Stefano, L. D. (2011). A com-
bined texture-shape descriptor for enhanced 3d fea-
ture matching. In Image Processing (ICIP), 2011 18th
IEEE International Conference on, pages 809–812.
IEEE.
Yu, J., Weng, K., Liang, G., and Xie, G. (2013). A vision-
based robotic grasping system using deep learning for
3d object recognition and pose estimation. In Robotics
and Biomimetics (ROBIO), 2013 IEEE International
Conference on, pages 1175–1180. IEEE.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
318
