
Coverage-guided Intelligent Test Loop
A Concept for Applying Instrumented Testing to Self-organising Systems
Jan Kantert
1
, Sven Tomforde
2
, Susanne Weber
1
and Christian Müller-Schloer
1
1
Institute of Systems Engineering, Leibniz University Hanover,
Appelstr. 4, 30167 Hanover, Germany
2
Intelligent Embedded Systems Group, University of Kassel,
Wilhelmshöher Allee 73, 34121 Kassel, Germany
Keywords:
Multi-Agent-Systems, Testing, Self-organisation, Organic Computing.
Abstract:
Multi-agent systems typically consist of a large set of agents that act on behalf of different users. Due to
inherent dynamics in the interaction patterns of these agents, the system structure is typically self-organising
and appears at runtime. Testing self-organising systems is a severe challenge that has not received the necessary
attention within the last decade. Obviously, traditional testing methods reach their limitations and are hardly
applicable due to the runtime characteristics and dynamics of self-organisation. In this paper, we argue that
we run into a paradoxon if we try to utilise self-organising testing systems. In order to circumvent parts of the
underlying limitations, we propose to combine such an approach with instrumented testing.
1 INTRODUCTION
Technical systems are characterised by a dramatically
increasing complexity (Tomforde et al., 2014b) One
manifestation of this observation is the law of Glass:
Each 25% increase in functionality entails 100% in-
crease in complexity for software solutions (Glass,
2002). Examples for such systems are traffic con-
trol systems (Prothmann et al., 2011), data commu-
nication networks (Tomforde et al., 2010; Tomforde
et al., 2009), volunteer-based resource sharing sys-
tems (Kantert et al., 2015), or smart grids (Tomforde
et al., 2014a).
As a key concept to counter these challenges aris-
ing from complexity issues, self-organisation is ap-
plied – meaning that scalable and intelligent control
concepts are needed (Tomforde and Müller-Schloer,
2014). Consequently, large parts of former design-time
based decisions are transferred to runtime and into
the responsibility of the systems themselves (Müller-
Schloer et al., 2011). On the one hand, this allows us to
master the upcoming issues, e.g. by learning and self-
optimisation techniques (Tomforde et al., 2011). On
the other hand, this opens novel challenges in terms of
reliability and accurate functioning: How to test such
a system that will develop parts of its behaviour and
important aspects of its structure at runtime?
One possible solution to this problem is to make
use of a self-organised testing system – meaning to
let the test system develop test cases and situations
autonomously and observing if the tested system reacts
within certain pre-defined boundaries. In addition,
the tested system can be confronted with disturbed
situations – so that it has to restore its behaviour. Albeit
the obvious advantages, this approach has a severe
disadvantage: Who tests the test system?
In this paper, we highlight the resulting paradoxon
and propose to combine such an approach with a con-
cept that is known as instrumented testing (Huang,
1978). Although this does not solve the problem of
testing the tester completely, it allows for a more stan-
dardised test schedule and higher repeatability. Fol-
lowing such a process, the problem of testing self-
organised systems, and especially multi-agent systems,
may become less complex (Wooldridge, 1998).
The remainder of this paper is organised ad fol-
lows: Section 2 briefly summarises the state-of-the-art
related to testing self-organised systems. Afterwards,
Section 3 formulates a vision to cope with the afore-
mentioned challenges. Section 4 presents a concept
to develop an instrumented testing solution for self-
organised systems and discusses issues concerning
complexity reduction in this context. Finally, Sec-
tion 5 summarises the paper and gives a brief outlook
to future work.
Kantert, J., Tomforde, S., Weber, S. and Müller-Schloer, C.
Coverage-guided Intelligent Test Loop - A Concept for Applying Instrumented Testing to Self-organising Systems.
DOI: 10.5220/0005992702210226
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 1, pages 221-226
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
221

2 TESTING SELF-ORGANISING
ADAPTIVE SYSTEMS
Self-adaptive and self-organising systems from the
multi-agent system domain (Wooldridge, 1998) are
designed to cope with changing internal and external
conditions (see, e.g., (Chang et al., 2009; McKinley
et al., 2004)). Standard test approaches are situated at
design-time and aim at checking the system towards
the specification, they try to detect failures, and val-
idate the behaviour. Traditional concepts to achieve
solutions for these challenges are based on test cases
and consequently static by nature – the underlying
dynamics of runtime self-organisation (that is com-
mon for multi-agent systems, see (Wooldridge, 1998))
are hardly testable with such an approach (Salehie
and Tahvildari, 2009; Welsh and Sawyer, 2010). The
applicability of design-time test cases is especially lim-
ited due to self-configuration in response to changing
requirements and environmental conditions (see (Fred-
ericks et al., 2013)).
In general, anticipating each possibly occurring
runtime situation a system will face (in combination
with the corresponding status) is considered to be
impossible (see, e.g., (Chang et al., 2009; Sawyer
et al., 2010; Cheng et al., 2009)). Consequently, the
focus of researchers shifted towards assurance tech-
nologies and runtime monitoring for testing purposes
(see, e.g., (Fredericks et al., 2013; Zhang et al., 2011))
within the last decade. One particular example has
been presented by Fredericks et al. (Fredericks et al.,
2013) which addresses the assurance of self-adaptive
systems with a runtime feedback-loop concept that
takes the initial requirements into account. It tries to
maintain consistency between design-time test cases
and the dynamics at runtime. The problem here is that
only design-time based test cases are considered. In
general, this and similar concepts try to improve the
test , mostly through runtime requirements and spec-
ification monitoring. The problem here is that these
approaches are typically limited in terms of comparing
just the satisfaction of requirements rather than full
testing.
In addition, test systems have been proposed that
are increasingly characterised by self-organisation
themselves. One particular example is the test frame-
works as outlined by Eberhardinger et al. (Eber-
hardinger et al., 2014). Based on introducing corridors
of desired behaviour that have to be maintained by the
self-organising system, the test framework tries to find
situations where these corridors are violated. It thereby
makes use of self-organisation and self-adaptation it-
self. Although the framework’s current version seems
to be situated at design-time, it might be applied to
runtime testing as well. The concept entails another
important problem: If the test system itself is self-
organised and self-adaptive, how is this test system
tested?
Trying to force the system under test into situations
where it validates the corridors and then observing if
and how fast it recovers is a first important aspect.
But it does not necessarily incorporate a test coverage
that considers issues and challenges the system will
face at runtime. For instance, cooperation with novel
systems at runtime that have even not been anticipated
during design or the rise of novel communication and
coupling technology may lead to influences that have
not been anticipated by test engineers.
Partly, this problem has been considered in tradi-
tional testing under the term “test oracle” (McCaffrey,
2009). Such an oracle is a mechanism that estimates
whether a test has passed or failed. It therefore works
on the basis of comparing the observed system out-
put with for a given test-related input, to the desired
output produces by the oracle following a pre-defined
model. This concept goes back to Howden who ini-
tially defined the term and highlighted the applicabil-
ity (Howden, 1978) (this concept has been adapted
towards the utilisation of various oracles in (Weyuker,
1980)). The automatic generation of test cases as per-
formed by the oracle covers the general idea of testing
the self-organised system under test as outlined before.
The major drawback of this solution is that the ora-
cle needs a model that defines how to generate test
cases – in case of multi-agent systems, such an appro-
priate model is hardly available. More precisely, if a
sophisticated model exists that allows for a suitable
test case generation, the problem itself would follow a
pre-definable model – as a consequence, the solution
system does not need to make use of self-adaptation
and self-organisation techniques. Finally, multi-agent
systems require communication and cooperation. Test-
ing communication relations is not an issue and can
be handled by standard network approaches. In con-
trast, aspects of the multi property within the term of
multi-agent systems requires taking group composi-
tion, negotiation results, and condition chains follow-
ing dynamics into account, for instance. This again
leads to the questions regarding the runtime behaviour
as outlined before when considering self-organisation
capabilities.
Consequently, even the self-organised test system
will not be able to check how the system under test will
react – still there is a need of anticipation by engineers.
Some of these issues might be addressed by combin-
ing the concept with techniques such as instrumented
testing, which is outlined in the following section.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
222

3 COMBINATION WITH
INSTRUMENTED TESTING
Self-organising systems (such as multi-agent systems)
consisting of multiple distributed entities which can
adapt based on their environment are too complex to
be tested using a traditional test harness, see (Kantert
et al., 2014) for such a complex example. To create
novel scenarios and test the adaptation of such systems,
we require an adaptive self-organising test system.
3.1 Challenge
The goal of testing is to i) find errors (i.e., crashes)
and ii) ensure correct behaviour and convince the
user/customer that the system solves the right prob-
lem. When finding errors (i) it is important to cover
as much of the functionality as possible. In contrast,
ensuring correct behaviour (ii) typically only covers
all important features of a system.
However, when using a self-organising test sys-
tem, we cannot ensure correct behaviour of the test
system (except by using another self-organised test
system on top). We assume that a function
Q(t, s)
exists, which gives us the quality of the solution
s
re-
turned by the system for a given test point
t
. Thereby,
a self-organised test system can instantiate different
system configurations, autonomously test the solution
for different test points, and rate their quality.
Unfortunately, this system can neither provide a
solution for (i) nor (ii). Coverage (i) usually cannot
be measured in self-organising systems and, therefore,
comprehensive error testing is not possible. Addition-
ally, testing self-organisation/adaption in/to unknown
situations as an important feature of such systems is
hard because we typically do not know unanticipated
situations.
The best we can do is fuzzy testing (Sutton et al.,
2007) by trying numerous possible configurations and
test points. Unfortunately, even in traditional software
systems the state space is extremely large and this is
not possible in practise.
Therefore, coverage-guided instrumented fuzzy
testing is used where the fuzzer (such as American
Fuzzy Lop (AFL) (Zalewski, 2015b) or (Drysdale,
2016)) receives feedback about all covered branches
in the tested software. Using that data, the fuzzer can
“intelligently” modify the test point to cover all func-
tionality. Still, this approach only allows to optimise
coverage and cannot verify correctness. Therefore,
it has been applied very successfully recently to find
simple crashes and security vulnerabilities in complex
software such as compression lib or XML parsers (Za-
lewski, 2015a). Unfortunately, we cannot use tradi-
tional instrumented testing in self-organising systems
containing multiple agents because agents are consid-
ered to be blackboxes (Wooldridge, 1998). Therefore,
we cannot know which functionality gets tested.
3.2 Vision
In the following, we present a vision of how instru-
mented testing can be processed for self-organising
systems. We envision to use coverage-guided instru-
mented testing (Huang, 1978) for self-organising sys-
tems containing of multiple distributed agents with
configuration
C
, input
I
and generating output
O
.
When instantiating a test harness, we propose to relax
the blackbox assumption for agents slightly to allow
for instrumentation. Our approach does not require
access to the source code but to coverage information
about the running binary. Additionally, we assume
deterministic behaviour when rerunning the same sce-
nario in our test harness (i.e., using the same random
seed by including it in C).
In the first step, we test single agents using instru-
mented testing and a fuzzer. In every execution an
agent with configuration
C
receives a series of mes-
sages
I
. Instrumentation allows us to ensure (nearly)
full coverage of all functionality and a creation of a
(minimal) test set. Typically, we cannot verify seman-
tic correctness of response
O
. However, we can find
simple crashes and ensure that all messages comply to
the predefined protocol.
Unfortunately, this does not test any system dy-
namics or self-organisation. Additionally, hidden state
(e.g., learning algorithms used in the agent) may limit
the ability of a fuzzer to gain good coverage.
Therefore, we propose to test the system in integra-
tion in a second step. Again, we assume that the test
harness including the environment is isolated and can
be repeated deterministically.
C
contains the configu-
ration of all agents while
I
describes all input from the
environment during runtime. Furthermore, we need a
function
Q (I, O)
to verify the quality of an output
O
for a certain (environment) input I.
Using instrumented fuzzing again, we can find
many unique situations and simulate the system re-
sponse. Because of the enormous configuration space
C
and input size
I
this can probably not create an ex-
haustive list. This could be improved by testing only a
limited configuration C.
Afterwards, tuples on the list are rated using
Q
and
the overall quality of the system is calculated. Further-
more, critical situations and inputs can be identified
and returned to the designer for further analysis.
Coverage-guided Intelligent Test Loop - A Concept for Applying Instrumented Testing to Self-organising Systems
223
4 APPROACH
In the approach, we present a concept to apply our
vision from the previous section to test self-organising
system with coverage-guided fuzzing in a test harness.
4.1 Testing a Single Agent
As introduced in our vision (see Section 3.2), the
first step is to put a single agent
S
into a test harness
(see Figure 1). Input
I
comprises the configuration
C
and a sequence of data which is sent to the agent. All
data sent by the agent is contained in Output O.
S
Input
Output
Test Harness
Figure 1: Putting a single agent S into a test harness.
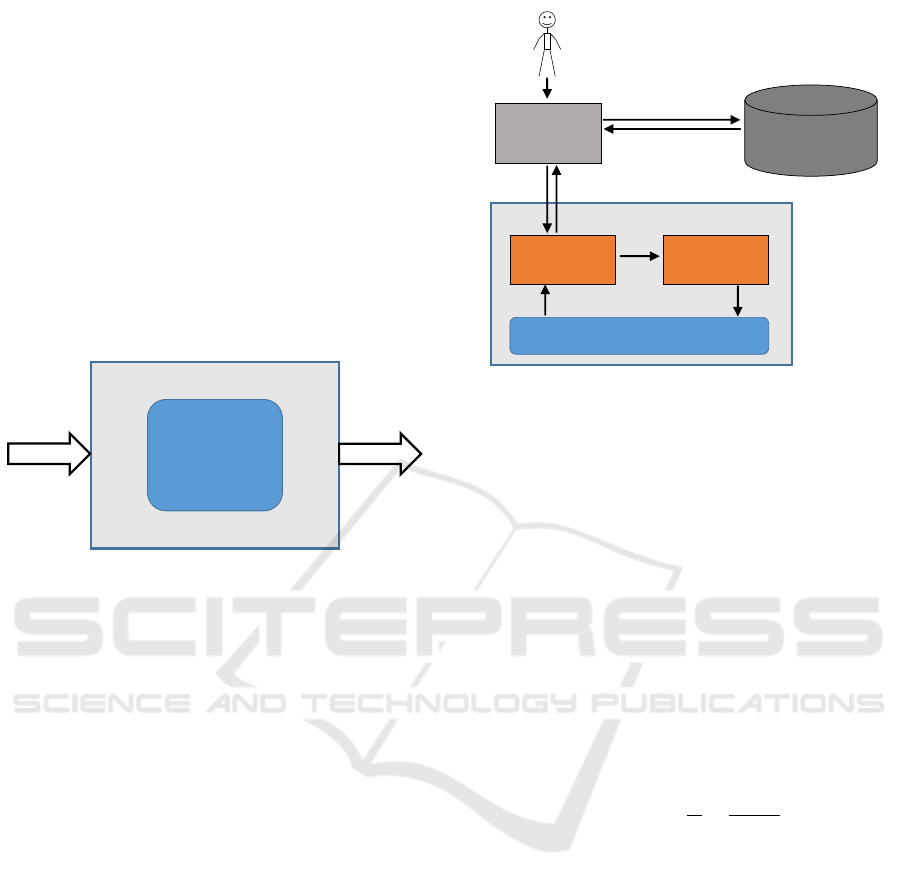
In practice, a test harness for coverage-guided test-
ing of self-organising system is more complex. In
Figure 2, we show an overview of the test system.
The Fuzzer tries to select an input to explore previous
untested functionality. This input is passed to the Ex-
ecutor which configures and executes a test run of the
Self-organising System under test. After a run com-
pleted, the output
O
and coverage infos are passed
back to the Fuzzer. If a configuration with new cov-
erage was found or failures occured, it is reported to
the Test Manager which stores the configuration in the
Test Database. The Test Manager queries the database
to find areas with low coverage and passes those con-
figurations to the Fuzzer to explore them.
With this architecture it is possible to perform
coverage-guided tests on self-organising systems in a
test harness.
4.2 Levering Complexity Reduction
Most agents in self-organising systems use an
intelligent control mechanism, such as the ob-
server/controller pattern (O/C (Tomforde et al., 2011))
or similar architectures (such as MAPE (IBM, 2005)).
All of those architectures have in common that they
reduce the complexity of configuring the internal sys-
tem to the outside. In Figure 3, we show a system
with an intelligent control mechanism (CM - realised
Initiate,
run
Self-organising System
Fuzzer
Executor
Test
Manager
Test
Database
Configure, observe, guide
Inputs
Store, query
Results
Report
Coverage info
System
calls
Figure 2: Coverage-guided test harness for self-organising
systems.
as O/C) on top.
I
is passed directly to the produc-
tion engine below but all external configuration
C
e
= C
is going through the O/C which usually passes more
configuration bits C
i
to the production engine.
The complexity reduction can be measured using
the variability
v(C
e
, C
i
)
(see (Schmeck et al., 2010)).
First, we determine the size of both configuration pa-
rameter sets
C
i
and
C
e
in
V
i
and
V
e
(see Equations (1)
and (2)). We use those to calculate the complexity
reduction R (Equation (3)) and the variability
v
(Equa-
tion (4)).
V
i
B log
2
C
i
(1)
V
e
B log
2
C
e
(2)
R B V
i
− V
e
(3)
v(C
i
, C
e
) B
R
V
i
=
V
i
+ V
e
V
i
(4)
In general, a complexity reduction is considered as
good. However, some internal configurations become
unavailable to external configuration. When trying
to perform coverage-guided testing, this should be
considered when looking at the reached coverage. The
higher
R
gets, the lower the resulting coverage will be.
Therefore, in a test harness, a agent should be con-
sidered to look similar as sketched in the illustration
of Figure 4. We are only able to reach explore the full
external configuration
C
e
of the controller and some
parts of the SuOC may be unavailable to external con-
figuration. However, since those parts will also be
unavailable during runtime of the agent, there is also
no value in covering those internal configurations.
4.3 Testing Self-organising Systems
Finally, in step two, we test self-organising systems in
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
224
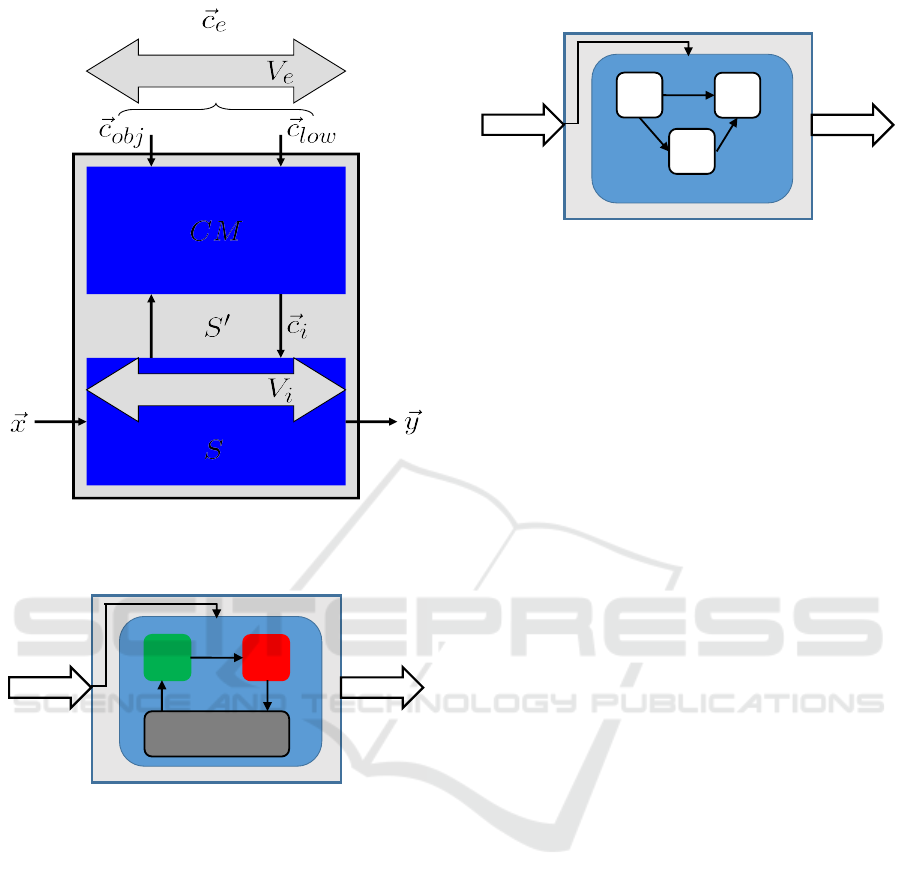
variability
variability
S‘
Figure 3: Complexity reduction as proposed by (Schmeck
et al., 2010).
S
Input
Output
Test Harness
O
C
SuOC
Figure 4: Complexity reduction in test harness with a single
agent.
integration. In this scenario, the external configuration
of all agents is contained in input
I
and the output of
all agents in output O. In Figure 5, we show a system
consisting of three agents in test harness.
Since the size of the input
I
is larger, naive
coverage-guided fuzzing is much slower. However,
we can exploit the Test Database from the single agent
tests to select configurations which enables or dis-
ables certain internal parts of the agent. That way,
the fuzzing can invest more effort into testing distinct
situations which allows testing different communica-
tion and cooperation patterns.
5 CONCLUSION
This paper outlines the challenges that we assume as
S
Input
Output
Test Harness
Figure 5: Putting a Self-Organising System into a test har-
ness.
most important in the context of testing multi-
agent systems with respect to self-adaptive and self-
organised behaviour. We highlighted the need of novel
solutions to automated testing, especially since tradi-
tional test cases are too static to be applicable.
As a result, we found a pardoxon: Testing self-
organised systems with a self-organised test systems
poses the question how such a test system is tested
itself. Since there seems to be no obvious solution,
it will most probably be the best way to follow when
considering testing. However, we proposed to combine
such a concept with more established techniques such
as instrumented testing in order to reduce the possible
impact of vast configuration and situation spaces of
the system.
ACKNOWLEDGEMENTS
This research is funded by the research unit “OC-
Trust” (FOR 1085) of the German Research Foun-
dation (DFG).
REFERENCES
Chang, B., de Leos, R., Inverardi, P., and Magee, J., edi-
tors (2009). Software Engineering for Self-Adaptive
Systems. Springer Verlag, New York, USA. ISBN
978-3-642-02161-9.
Cheng, B. H., Sawyer, P., Bencomo, N., and Whittle, J.
(2009). "a goal-based modeling approach to develop
requirements of an adaptive system with environmental
uncertainty". In Proceedings of the 12th International
Conference on Model Driven Engineering Languages
and Systems, MODELS ’09, pages 468–483, Berlin,
Heidelberg. Springer-Verlag.
Drysdale, D. (2016). Coverage-guided kernel fuzzing with
syzkaller. https://lwn.net/Articles/677764/.
Eberhardinger, B., Seebach, H., Knapp, A., and Reif, W.
(2014). "towards testing self-organizing, adaptive sys-
tems". In Merayo, M. and de Oca, E., editors, Testing
Software and Systems, volume 8763 of Lecture Notes
Coverage-guided Intelligent Test Loop - A Concept for Applying Instrumented Testing to Self-organising Systems
225

in Computer Science, pages 180–185. Springer Berlin
Heidelberg.
Fredericks, E. M., Ramirez, A. J., and Cheng, B. H. C.
(2013). "towards run-time testing of dynamic adap-
tive systems". In Proceedings of the 8th International
Symposium on Software Engineering for Adaptive and
Self-Managing Systems, SEAMS ’13, pages 169–174,
Piscataway, NJ, USA. IEEE Press.
Glass, R. L. (2002). Facts and Fallacies of Software Engi-
neering. Agile Software Development. Addison Wes-
ley, Boston, US.
Howden, W. E. (1978). Introduction to the theory of testing.
In Software Testing and Validation Techniques, pages
16 – 19. IEEE Computer Society Press, Long Beach,
CA, USA.
Huang, J. (1978). "program instrumentation and software
testing". Computer, (4):25–32.
IBM (2005). An architectural blueprint for autonomic com-
puting. Technical report, IBM.
Kantert, J., Edenhofer, S., Tomforde, S., and Müller-Schloer,
C. (2015). Representation of Trust and Reputation
in Self-Managed Computing Systems. In IEEE 13th
International Conference on Dependable, Autonomic
and Secure Computing, DASC 2015, pages 1827–1834,
Liverpool, UK. IEEE.
Kantert, J., Scharf, H., Edenhofer, S., Tomforde, S., Hähner,
J., and Müller-Schloer, C. (2014). A Graph Analysis
Approach to Detect Attacks in Multi-Agent-Systems
at Runtime. In 2014 IEEE Eighth International Con-
ference on Self-Adaptive and Self-Organizing Systems,
pages 80–89, London, UK. IEEE.
McCaffrey, J. D. (2009). Software Testing. Fundamental
Principles and Essential Knowledge. Samir Riad Press.
ISBN-13: 978-1439229071.
McKinley, P. K., Sadjadi, S. M., Kasten, E. P., and Cheng,
B. H. C. (2004). "composing adaptive software". Com-
puter, 37(7):56–64.
Müller-Schloer, C., Schmeck, H., and Ungerer, T., editors
(2011). Organic Computing - A Paradigm Shift for
Complex Systems. Autonomic Systems. Birkhäuser
Verlag.
Prothmann, H., Tomforde, S., Branke, J., Hähner, J., Müller-
Schloer, C., and Schmeck, H. (2011). Organic Traffic
Control. In Organic Computing – A Paradigm Shift for
Complex Systems, pages 431 – 446. Birkhäuser Verlag.
Salehie, M. and Tahvildari, L. (2009). "self-adaptive soft-
ware: Landscape and research challenges". ACM Trans.
Auton. Adapt. Syst., 4(2):14:1–14:42.
Sawyer, P., Bencomo, N., Whittle, J., Letier, E., and Finkel-
stein, A. (2010). "requirements-aware systems: A
research agenda for re for self-adaptive systems". In
Proceedings of the 2010 18th IEEE International Re-
quirements Engineering Conference, RE ’10, pages
95–103, Washington, DC, USA. IEEE Computer Soci-
ety.
Schmeck, H., Müller-Schloer, C., Çakar, E., Mnif, M., and
Richter, U. (2010). Adaptivity and Self-organisation
in Organic Computing Systems. ACM Transactions on
Autonomous and Adaptive Systems (TAAS), 5(3):1–32.
Sutton, M., Greene, A., and Amini, P. (2007). Fuzzing: brute
force vulnerability discovery. Pearson Education.
Tomforde, S., Hähner, J., Seebach, H., Reif, W., Sick, B.,
Wacker, A., and Scholtes, I. (2014a). Engineering and
Mastering Interwoven Systems. In ARCS 2014 - 27th
International Conference on Architecture of Comput-
ing Systems, Workshop Proceedings, February 25-28,
2014, Luebeck, Germany, University of Luebeck, Insti-
tute of Computer Engineering, pages 1–8.
Tomforde, S., Hähner, J., and Sick, B. (2014b). Interwo-
ven Systems. Informatik-Spektrum, 37(5):483–487.
Aktuelles Schlagwort.
Tomforde, S. and Müller-Schloer, C. (2014). Incremental
Design of Adaptive Systems. Journal of Ambient Intel-
ligence and Smart Environments, 6:179 – 198.
Tomforde, S., Prothmann, H., Branke, J., Hähner, J., Mnif,
M., Müller-Schloer, C., Richter, U., and Schmeck, H.
(2011). Observation and Control of Organic Systems.
In Organic Computing - A Paradigm Shift for Complex
Systems, pages 325 – 338. Birkhäuser Verlag.
Tomforde, S., Steffen, M., Hähner, J., and Müller-Schloer, C.
(2009). Towards an Organic Network Control System.
In Proc. of the 6th Int. Conf. on Autonomic and Trusted
Computing (ATC’09), held in Brisbane, Australia (Jul
7, 2009 - Jul 10, 2009), pages 2 – 16. Springer Verlag.
Tomforde, S., Zgeras, I., Hähner, J., and Müller-Schloer, C.
(2010). Adaptive control of Wireless Sensor Networks.
In Proceedings of the 7th International Conference on
Autonomic and Trusted Computing (ATC’10), held in
Xi’an, China (October 26-29, 2010), pages 77 – 91.
Welsh, K. and Sawyer, P. (2010). "understanding the scope
of uncertainty in dynamically adaptive systems". In
Wieringa, R. and Persson, A., editors, Requirements
Engineering: Foundation for Software Quality, volume
6182 of Lecture Notes in Computer Science, pages
2–16. Springer Berlin Heidelberg.
Weyuker, E. J. (1980). The oracle assumption of program
testing. In Proceedings of the 13th International Con-
ference on System Sciences (ICSS), pages 44 – 49,
Honolulu, HI, USA. IEEE.
Wooldridge, M. J. (1998). Agent Technology: Foundations,
Applications, and Markets. Springer Science & Busi-
ness Media, Berlin, Heidelberg, New York.
Zalewski, M. (2015a). Bugs found by AFL. http://lcamtuf.
coredump.cx/afl/.
Zalewski, M. (2015b). Technical "whitepaper" for afl-fuzz.
http://lcamtuf.coredump.cx/afl/technical_details.txt.
Zhang, Z., Thangarajah, J., and Padgham, L. (2011). "auto-
mated testing for intelligent agent systems". In Gleizes,
M.-P. and Gomez-Sanz, J., editors, Agent-Oriented
Software Engineering X, volume 6038 of Lecture Notes
in Computer Science, pages 66–79. Springer Berlin
Heidelberg.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
226
