
Choice of Spacecraft Control Contour Variant with Self-configuring
Stochastic Algorithms of Multi-criteria Optimization
Maria Semenkina
1, 2
, Shakhnaz Akhmedova
1
, Christina Brester
1
and Eugene Semenkin
1
1
Institute of Computer Sciences and Telecommunication, Siberian State Aerospace University,
Krasnoyarskiy Rabochiy ave., 31, Krasnoyarsk, 660014, Russia
2
Institute of Mathematics and Computer Science, Siberian Federal University,
Svobodnyj ave. 79, Krasnoyarsk, 660041, Russia
Keywords: Spacecraft Command-programming Control Contours Modelling, Markov Chains, Effective Variant Choice,
Multi-objective Optimization, Evolutionary Algorithms, Self-configuration, Bio-inspired Intelligence.
Abstract: Command-programming control contours of spacecraft are modelled with Markov chains. These models are
used for the preliminary design of spacecraft control system effective structure. Corresponding optimization
multi-objective problems with algorithmically given functions of mixed variables are solved with a special
stochastic algorithms called Self-configuring Non-dominated Sorting Genetic Algorithm II, Cooperative
Multi-Objective Genetic Algorithm with Parallel Implementation and Co-Operation of Biology Related
Algorithms for solving multi-objective integer optimization problems which require no settings determination
and parameter tuning. The high performance of the suggested algorithms is proved by solving real problems
of the control contours structure preliminary design.
1 INTRODUCTION
The synthesis of a spacecraft control systems is a
complex and undeveloped problem. Usually this
problem is solved with more empirical methods rather
than formalized mathematical tools. Nevertheless, it
is possible to model some subproblems
mathematically and to obtain some qualitative results
of computations and tendencies that could provide
experts with interesting information.
We will model the functioning process of a
spacecraft control subsystems with Markov chains.
We explain all results with small models and then
give illustration of large models that are closer to real
system. The problem of choosing an effective variant
for a spacecraft control system is formulated as a
multi-objective discrete optimization problem with
algorithmically given functions. In this paper, we use
self-configuring evolutionary algorithms,
Cooperative Multi-Objective Genetic Algorithm and
Co-Operation of Biology Related Algorithms to solve
the optimization problem.
The rest of the paper is organized in the following
way. Section 2 briefly describes the modeled system.
In Sections 3 we describe models for command-
programming control contours. In Section 4 we
describe optimization algorithms that have been used.
In Section 5, the results of the algorithms
performance evaluation on spacecraft control system
optimization problems is given, and in the Conclusion
section the article content is summarized and future
research directions are discussed.
2 PROBLEM DESCRIPTION
If we simplify then we can describe the system for
monitoring and control of an orbital group of
telecommunication satellites as an automated,
distributed, information-controlling system that
includes on-board control complexes (BCC) of a
spacecraft and the ground-based control complex
(GCC) (Semenkin, 2012) in its composition. They
interact through a distributed system of telemetry,
command and ranging (TCR) stations and data
telecommunication systems in each. BCC is the
controlling subsystem of the satellite that ensures real
time checking and controlling of on-board systems
including pay-load equipment (PLE) as well as
fulfilling program-temporal control. "Control
contours" contain essentially different control tasks
Semenkina, M., Akhmedova, S., Brester, C. and Semenkin, E.
Choice of Spacecraft Control Contour Variant with Self-configuring Stochastic Algorithms of Multi-criteria Optimization.
DOI: 10.5220/0006009502810286
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 1, pages 281-286
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
281

from different subsystems of the automated control
system. In this paper we will consider command-
programming contours.
All contours are not function dependable and have
many indexes that leads to many challenges during
choosing an effective control system variant to ensure
to all of the control contours. All this problems are
multi-objective with criteria that cannot be given in
the form of an analytical function of its variables but
exist in an algorithmic form which requires a
computation or simulation model to be run for
criterion evaluation at any point.
In order to have the possibility of choosing an
effective variant of such a control system, we have to
model the work of all control contours and then
combine the results in one optimization problem with
many models, criteria, constraints and
algorithmically given functions of mixed variables.
We suggest using adaptive stochastic direct search
algorithms (evolutionary and bio-inspired) for
solving such optimization problems. To deal with
many criteria and constraints successfully we just
have to incorporate techniques, well known in the
evolutionary computation community.
To support the choice of effective variants of
spacecrafts' control systems, we have to develop the
necessary models and resolve the problem of
evolutionary algorithms (EA) and bio-inspired
methods settings for multi-objective optimization.
3 COMMAND-PROGRAMMING
CONTROL CONTOUR
MODELLING
The main task of this contour is the maintenance of
the tasks of creating of the command-programming
information (CPI), transmitting it to BCC and
executing it and control action as well as the
realization of the temporal program (TP) mode of
control (Semenkin, 2012).
Markov chains can be used for modelling this
contour because of its internal features such as high
reliability and work stability. That is why we are
supposing that all stochastic flows in the system are
Poisson. If we suppose that BCC can fail and GCC is
absolutely reliable, then we can introduce the
following notations: λ
1
is the intensity of BCC
failures, μ
1
is the intensity of temporal program
computation, μ
2
is the intensity CPI loading into
BCC, μ
3
is the intensity of temporal program
execution, μ
4
is the intensity of BCC being restored
after its failure. The graph of the states for command-
programming contour can be drawn as in Figure 1.
There are also five possible states for this contour
(Semenkin, 2012):
1. BCC fulfills TP, GCC is free.
2. BCC is free, GCC computes TP.
3. BCC is free; GCC computes CPI and loads TP.
4. BCC is restored with GCC which is waiting for
continuation of TP computation.
5. BCC is restored with GCC which is waiting for
continuation of CPI computation.
Figure 1: The states graph of the Markov chain for the
simplified model of the command-programming control
contour (Semenkin, 2012).
After solving the Kolmogorov's system:
P
1
·(λ
1
+μ
3
) - μ
2
·P
3
= 0,
P
2
·(λ
1
+μ
1
) - μ
3
·P
1
- μ
4
·P
4
= 0,
P
3
·(λ
1
+μ
2
) - μ
1
·P
2
- μ
4
·P
5
= 0,
P
4
·μ
4
- λ
1
·P
1
- λ
1
·P
2
= 0,
P
5
·μ
4
- λ
1
·P
3
= 0,
P
1
+ P
2
+ P
3
+ P
4
+ P
5
= 1.
we can calculate the necessary indexes of control
quality for the command-programming contour:
1. T = P
1
/(μ
2
⋅P
3
)→max (the duration of the
independent operating of the spacecraft for this
contour);
2. t
1
= (P
3
+P
5
)/(μ
1
⋅P
2
)→min (the duration of BCC and
GCC interactions when loading TP for the next
interval of independent operation of the spacecraft);
3. t
2
= (P
2
+P
3
+P
4
+P
5
)/P
1
⋅(λ
1
+μ
3
) →min (the average
time from the start of TP computation till the start of
TP fulfillment by BCC).
Optimization variables are stochastic flow
intensities, i.e., the distribution of contour functions
between BCC and GCC. If they are characteristics of
existing variants of software-hardware equipment, we
have the problem of effective variant choice, i.e., a
discrete optimization problem.
Recall that obtained optimization problem has
algorithmically given objective functions so before
the function value calculation we must solve the
system of equations.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
282

But in real life GCC is not absolutely reliable, if
we suppose the GCC can fail then we have to add the
states when GCC fails while the system is in any state.
We will not describe the meaning of all notion in
details, recall that λ
i
indicates the intensities of
subsystems failures and μ
j
indicates the intensities of
subsystems being restoring by BCC (for PLE) or
GCC (for all subsystems including itself) (Semenkin,
2012). Under the same conditions, the states graph for
the command-programming contour consists of 96
states and more than 300 transitions and cannot be
shown here.
So we need a reliable tool to solve so hard
optimization problems, for example it can be some
adaptive search algorithms.
4 OPTIMIZATION
ALGORITHMS DESCRIPTION
There are many variants of evolutionary algorithms,
which can be used for solving multi-objective
optimization problems: Niched-Pareto Genetic
Algorithm (NPGA) (Horn, 1994), Pareto Envelope-
based Selection Algorithm (PESA) (Corne, 2000) and
their modifications PESA-II (Corne, 2001), Non-
dominated Sorting Genetic Algorithm II (NSGA-II)
(Deb, 2002), Strength Pareto Evolutionary Algorithm
II (SPEA-II) (Zitzler, 2002), the Preference-Inspired
Co-Evolutionary Algorithm with goal vectors
(PICEA-g) (Wang, 2013).
In this paper we consider three algorithms: Self-
configuring Non-dominated Sorting Genetic
Algorithm II (SelfNSGA-II), Cooperative Multi-
Objective Genetic Algorithm (CoMOGA) and Co-
Operation of Biology Related Algorithms for solving
multi-objective integer optimization problems
(COBRA-mi).
4.1 Co-Operation of Biology Related
Algorithms
Co-Operation of Biology Related Algorithms
(COBRA) is a method for solving one-criterion
unconstrained real-parameter optimization problems
based on the cooperation of five nature-inspired
algorithms (Akhmedova, 2013). This algorithm
generates one population for each bio-inspired
component algorithm, such as Particle Swarm
Optimization (PSO) (Kennedy, 1995) for example.
From some viewpoints these five algorithms have a
similar behaviour and all of them are multi-agent
algorithms for a stochastic direct search that makes
almost impossible for end users choosing one of them
for solving the problem in hand. COBRA is an
algorithm with self-tuning of the population size that
can increase or decrease depending on results of the
work. Thus we have to choose only the maximum
number of fitness function evaluations and initial
number of individuals in population. After that
population sizes can decrease for worst populations,
increase for a winning algorithm and be constant
when communicating with other algorithm.
COBRA performance was evaluated on the
representative set of benchmark problems with 2, 3,
5, 10, and 30 variables (Akhmedova, 2013). Based on
the test results we can say that COBRA is reliable on
this benchmark and outperforms its component
algorithms. We may conclude that COBRA can be
used for solving our problem in hand.
COBRA has a multi-objective version (COBRA-
m) (Akhmedova, 2015) with modified components.
All these techniques were extended to produce a
Pareto optimal front. So each component algorithm
generates an archive of non-dominated solutions and
a common external archive is created. The procedure
of selecting the winning algorithm was changed by
the modification of the fitness function when criteria
are weighted by randomly generated coefficients
(Akhmedova, 2015). The performance of COBRA-m
was evaluated on the representative set of multi-
objective problems and its usefulness and workability
were established (Akhmedova, 2015).
Our problem in hand is an integer optimization
problem. That is why real numbers are rounded to the
nearest integers. Additionally, we make two
modification of COBRA-m to tackle constraints: if
individual falls beyond the set of possible values of
the variables then
1. It is randomly regenerated to be inside limits
(COBRA-mi), or alternatively
2. It is returned on the closest border (COBRA-
mim).
Both variants are investigated in this study.
4.2 Self-configuring Evolutionary
Algorithms
According to the research (Wang, 2013) NSGA-II is
the most often used variant. NSGA-II is more
effective than its predecessor (NSGA) in the sense of
computational resources and the quality of the
solutions (Abraham, 2005). Although its efficiency
decreases with the growth of the criteria number we
will implement it for solving our problem in hand
because we have only three criteria.
Choice of Spacecraft Control Contour Variant with Self-configuring Stochastic Algorithms of Multi-criteria Optimization
283

Although NSGA-II is successful in solving many
real world optimization problems (Abraham, 2005),
its performance depends on the selection of its
settings and tuning of its parameters. As well as for
the genetic algorithm we need to choose variation
operators (e.g. recombination and mutation) which
are used to generate new solutions from the current
population and some real-valued parameters of the
chosen settings (the probability of recombination, the
level of mutation, etc.). For reducing the role of this
choice we have implemented a modification of
NSGA-II transforming it into a self-configuring
variant likely to SelfCGA from (Semenkin, 2012)
which has demonstrated good performance for the
integer optimization problem with one criteria and
better reliability than the average reliability of the
corresponding single best algorithm.
As it was done in (Semenkin, 2012) we use setting
variants, namely types of crossover, population
control and a level of mutation (medium, low, high)
but we do not need to choose selection type because
NSGA-II has the only one selection variant, namely
the quick non-dominated sorting. Each of these has its
own deployment probability distribution that is
changed according to a special rule based on the
operator productivity. In case of the genetic algorithm
the ratio of the average offspring fitness obtained with
this operator and the offspring population average
fitness was used as the productivity of an operator.
But in case of multi-objective optimization we have
not just one function. That is the reason why we have
implemented some modification in the operator of
productivity evaluation such as the use of percent of
non-dominated individuals which are generated by
each operator type instead of average fitness value in
SelfCGA. This introduced here algorithm we will
refer as SelfNSGA-II.
4.3 Cooperative Multi-objective
Genetic Algorithm
Another variant of self-adapting evolutionary
algorithm for multi-objective problems can be
described as a cooperation of several multi-objective
genetic algorithm (MOGA). In our study an island
model is applied to involve a few GAs which realize
different concepts.
Generally speaking, an island model (Whitley et
al., 1997) of a GA implies the parallel work of several
algorithms. A parallel implementation of GAs has
shown not just an ability to preserve genetic diversity,
since each island can potentially follow a different
search trajectory, but also could be applied to
separable problems. The initial number of individuals
M is spread across L subpopulations. At each T-th
generation algorithms exchange the best solutions
(migration). There are two parameters: migration size,
the number of candidates for migration, and migration
interval, the number of generations between
migrations. Moreover, it is necessary to define the
island model topology, in other words, the scheme of
migration. We use the fully connected topology that
means each algorithm shares its best solutions with all
other algorithms included in the island model. The
multi-agent model is expected to preserve a higher
level of genetic diversity. The benefits of the particular
algorithm could be advantageous in different stages of
optimization.
In our implementation the NSGA-II, PICEA-g and
SPEA2 are used to be involved as parallel working
islands. This multi-agent heuristic procedure does not
require additional experiments to expose the most
appropriate algorithm for the problem considered. Its
performance was thoroughly investigated on the set of
test functions CEC2009 (Zhang., 2008). The results
obtained demonstrated the high effectiveness (Brester,
2015) of the cooperative algorithm (CoMOGA) and,
therefore, we also decided to apply it as an optimizer
in the current problem.
4.4 Hybridisation with Pareto Local
Search
The main idea of a Pareto local search is to find a local
Pareto non-dominated point near of the start point.
This algorithm changes the start point if only it has
been dominated by some neighbour point. In this
work we will use the steepest decent strategy and
Hamming metrics for determination all point’s
neighbours in case of binary variables. Taking into
account the properties of the problem in hand we can
say that using the Pareto local search after global
optimization techniques can give us a guarantee that
point lays inside of Pareto set.
5 PROBLEM SOLVING RESULTS
First of all we evaluate performance of algorithms on
the simplified models of command-programming
control contours with 5 states. To choose an effective
variant of the command-programming control
contour we have to optimize the algorithmically given
function with 5 discrete variables. The optimization
space contains about 1.03·10
6
variants and can be
enumerated with an exhaustive search within a
reasonable time (60 minutes by Intel Core i5-4690K
CPU 3.5 GHz). In such a situation, we know the real
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
284
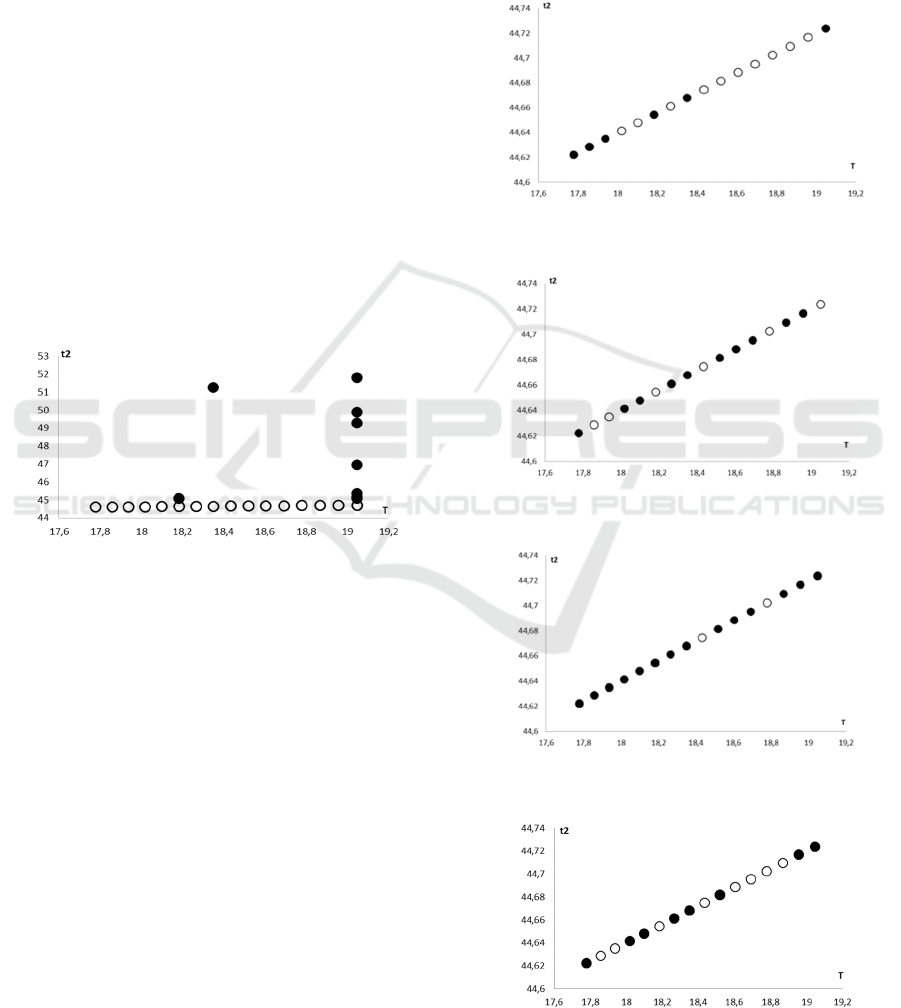
Pareto front and can make an analysis. In all figures
below the projection on the plane OTt
2
of the real
Pareto front for problem with 5 states are presented
by white points mean points. We can note that for this
problem the criterion t
1
does not contradict two others
and the Pareto front in other projections looks like
horizontal (Ot
2
t
1
, OTt
1
) or vertical (Ot
1
t
2
, Ot
1
T) lines.
We use 600 for each algorithm. This means the
algorithm examines 600 points of the optimization
space, i.e. about 0.057% of it (less than 1 minute by
the same CPU). We execute 20 runs of the algorithms
and determine their usual (typical) behaviour (almost
impossible to distinguish the results of two separate
runs).
The usual behaviour of COBRA-mi is presented
in Figure 2 (here and below black points mean the
algorithm result). We can note that it gives points
from the neighbourhood of Pareto front points which
can be then reduced to Pareto front points with the
help of the Pareto local search. The main problem for
COBRA-mi became the necessity for some variables
to catch exact border values. It is the main reason for
introducing COBRA-mim.
Figure 2: The projection of the Pareto front on the plane
OTt
2
obtained with COBRA-mi.
The usual behaviour of COBRA-mim is depicted
in Figure 3. We can note that it gives some points
from the Pareto front. The main problem for COBRA-
mim arises from criteria random weighting for
resources redistributing. We prefer subpopulations
with the best value of one criterion, i.e. different for
each cycle. It means that we use additive convolution
which cannot give all Pareto front points, but can
catch the ends of the Pareto front.
The usual behaviour of SelfNSGA-II is presented
in Figure 4. We can note that it gives about 60%
points from the Pareto front that are uniformly
distributed. However, SelfNSGA-II has some
difficulties with catching ends of the Pareto front. It
means that we can combine results of COBRA-mim
and SelfNSGA-II and take almost all Pareto front
points which can represent the whole front without
essential loses, see the Figure 5. We can note that
simple increasing of fitness function evaluations
number do not lead to finding the whole Pareto front
by single algorithm.
The usual behaviour of CoMOGA is presented in
Figure 6. We can note that it gives points from the
Pareto front which are well distributed. However,
CoMOGA gave almost the same points as
SelfNSGA-II, but not all of them, i.e. much fewer
Pareto points.
Figure 3: The projection of the Pareto front on the plane
OTt
2
obtained with COBRA-mim.
Figure 4: The projection on the plane OTt
2
of the Pareto
front obtained by SelfNSGA-II.
Figure 5: The projection of the Pareto front on the plane
OTt
2
obtained with SelfNSGA-II and COBRA-mim.
Figure 6: The projection of the Pareto front on the plane
OTt
2
obtained by CoMOGA.
Choice of Spacecraft Control Contour Variant with Self-configuring Stochastic Algorithms of Multi-criteria Optimization
285

For the model of the command-programming
control contour with 96 states and more than 300
transitions, we cannot give detailed information as we
have done above. This problem has 13 variables and
contains 4.5·10
15
points in the optimization space and
an exhaustive search cannot be used for any
reasonable time. The execution of our algorithms
requires the examination of 1.76·10
-9
% of the search
space (80000 fitness function evaluations) and gives
us as an answer only points from the Pareto front
which have been verified with the Pareto local search.
These points are uniformly distributed and look like
the good representation of the Pareto front. However,
certainly we cannot say at this stage of the research
that all Pareto front points are determined.
6 CONCLUSIONS
In this paper, the mathematical models in the form of
Markov chains have been implemented for choosing
effective variants of spacecraft command-
programming control contours. We focused on the
multi-objective part of the problem and suggested
using the Self-configuring Non-dominated Sorting
Genetic Algorithm II, Cooperative Multi-Objective
Genetic Algorithm and Co-Operation of Biology
Related Algorithms for solving multi-objective
integer optimization problems in such a situation
because of their reliability and high potential to be
problem adaptable. The high performance of the
considered algorithms has previously been
demonstrated through experiments with test problems
and then in this paper it is validated by the solving
hard optimization problems.
We suggested using three algorithms together as
an ensemble for better representability of the Pareto
front. These algorithms are suggested being used for
choosing effective variants of spacecraft control
systems as they are very reliable and require no expert
knowledge in evolutionary or bio-inspired
optimization from end users (aerospace engineers).
The future research includes the expansion into
using the simulation models and constrained
optimization problem statements.
ACKNOWLEDGEMENTS
This research is supported by the Ministry of
Education and Science of Russian Federation within
State Assignment № 2.1889.2014/K.
REFERENCES
Akhmedova, Sh., Semenkin, E., 2013. Co-Operation of
Biology Related Algorithms. In Proc. of Congress on
Evolutionary Computation (CEC 2013), pp. 2207–
2214.
Akhmedova, Sh., Semenkin, E., 2015. Co-Operation of
Biology-Related Algorithms for Multiobjective
Constrained Optimization. In ICSI-CCI 2015, Part I,
LNCS 9140, pp. 487–494.
Abraham, A., Jain, L., Goldberg, R., 2005. Evolutionary
multiobjective optimization: theoretical advances and
applications. New York: Springer Science, 302 p.
Brester, C., Semenkin, E., 2015. Cooperative Multi-
Objective Genetic Algorithm with Parallel
Implementation. In Proc. of ICSI-2015, pp. 471–478.
Corne, D., Knowles, J., Oates, M., 2000. The Pareto
envelope-based selection algorithm for multiobjective
optimization. In PPSN VI, Parallel Problem Solving
from Nature. Springer, pp. 839-848.
Corne, D., Jerram, N., Knowles, J., Oates, M., 2001. PESA-
II: Region-based selection in evolutionary
multiobjective optimization. In GECCO 2001,
Proceedings of the Genetic and Evolutionary
Computation Conference, pp. 283-290.
Deb, K., Pratap, A., Agarwal, S., Meyarivan, T., 2002. A
fast and elitist multiobjective genetic algorithm:
NSGA-II. In IEEE Transactions on Evolutionary
Computation 6 (2), pp. 182-197.
Horn, J., Nafpliotis, N., Goldberg, D., 1994. A niched
Pareto genetic algorithm for multiobjective
optimization. In CEC-1994, pp. 82-87.
Kennedy, J., Eberhart, R., 1995. Particle Swarm
Optimization. In Proc. of IEEE International
Conference on Neural networks, IV, pp. 1942–1948.
Semenkin, E., Semenkina, M., 2012. Spacecrafts' Control
Systems Effective Variants Choice with Self-
Configuring Genetic Algorithm. In Proc. of the 9th
International Conference on Informatics in Control,
Automation and Robotics, vol. 1, pp. 84-93.
Wang, R., 2013. Preference-Inspired Co-evolutionary
Algorithms. A thesis submitted in partial fulfillment for
the degree of the Doctor of Philosophy, University of
Sheffield, 231 p.
Yang, Ch., Tu, X., Chen, J., 2007. Algorithm of Marriage
in Honey Bees Optimization Based on the Wolf Pack
Search. In Proc. of the International Conference on
Intelligent Pervasive Computing, pp. 462–467.
Zhang, Q., Zhou, A., Zhao, S., Suganthan, P. N., Liu, W.,
Tiwari, S., 2008. Multi-objective optimization test
instances for the CEC 2009 special session and
competition. University of Essex and Nanyang
Technological University, Tech. Rep. CES-487.
Zitzler, E., Laumanns, M., Thiele, L., 2002. SPEA2:
Improving the Strength Pareto Evolutionary Algorithm
for Multiobjective Optimization. In Evolutionary
Methods for Design Optimization and Control with
Application to Industrial Problems, 3242 (103), pp. 95-
100.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
286
