
An Intelligent System for Motor Style Assessment and Training from
Inertial Sensor Data in Intermediate Level Ski Jumping
Heike Brock and Yuji Ohgi
Graduate School of Media and Governance, Keio University, 5322 Endo, 252-0882, Fujisawa-shi, Kanagawa, Japan
Keywords:
Inertial Sensors, Activity Recognition, Motion Analysis, Augmented Motion Feedback, Mobile Motor
Training, Ski Jumping.
Abstract:
In this research we developed a wearable, augmented motion feedback system for ubiquitous training and
motion assessment in mid-level ski jumping. Ski jump motion data captured with a set of inertial sensors were
first transformed into meaningful kinematic motion information using an extensive processing system. Next,
derived segment orientations, joint positions and joint angles were used to build and train motion knowledge
on the base of the sport’s common style and judging criteria. This intelligent machine knowledge was then
applied to identify specific style information within incoming motion data that could be provided to the athlete
as augmented motion feedback via a mobile training application. System validations on a set of test jumping
data showed that style errors could be recognized and displayed well by the implemented system. We therefore
believe the system to be suitable for the provision of kinematic motion feedback that could not be obtained
without an extensive training support environment otherwise. Adding a real-time environment for athlete-
system communication, this could lead to the creation of an ubiquitous training support application in future.
1 INTRODUCTION
The enhancementof motor skill acquisition and motor
learning by additional and augmented performance
feedback is one of the most interesting objectives for
technological support in sports. Particularly impor-
tant for the implementation of future training applica-
tions is the development of techniques that provide
motion information on an easy-to-use basis. This
problem comprises both the use of wearable capture
devices that can be employed under any environmen-
tal condition, and the processing of raw numerical
motion data into intuitive data output. In this work,
we addressed both aspects with the intention of im-
plementing a mobile style assessment and training
support system for intermediate and junior level ski
jumping.
Ski jumping is a very technical sport that is de-
fined by biomechanical and physical laws (e.g. drag
and lift) to a large extend. Erroneous motion execu-
tion and use of aerodynamic forces immediately in-
fluence the performance and can furthermore increase
the risk of fall and injury. However to date, knowl-
edge about ski jumping is mainly based on prac-
tical experience, simulations and wind tunnel mea-
surements (Seo et al., 2004; Marqu´es-Bruna and
Grimshaw, 2009b; Marqu´es-Bruna and Grimshaw,
2009a). Exact kinematic and dynamic properties of
an athlete are quite difficult to measure during the ac-
tual jump. This is due to the sport’s large field of mo-
tion activity as well as unstable weather and daylight
conditions. They do not allow for quality data from
conventional video or optical motion capture systems.
As a result, computer based motion analysis meth-
ods for ski jumping are effectively non-existent so far,
and the assessment of a jumping performance is still
a mainly visual task.
By making detailed and accurate ubiquitous mo-
tion information available to coaches and athletes,
new training standards could be set. In ski jumping,
we consider a mobile feedback platform as particu-
larly beneficial for junior and intermediate level ath-
letes. Here, economical and logistical constraints in-
fluence the quality of the general training structures:
for example it is common that many jumps are exe-
cuted within a very short span of time. Consequently,
responsible coaches often observe jumps from one
perspective only (generally the coaches’ stand), while
the assessment of every single jump performance has
to be instantaneous. Internal motor representations in
intermediate level jumpers on the other hand are less
stable than in professional athletes, making additional
Brock, H. and Ohgi, Y.
An Intelligent System for Motor Style Assessment and Training from Inertial Sensor Data in Intermediate Level Ski Jumping.
DOI: 10.5220/0006032901010108
In Proceedings of the 4th International Congress on Sport Sciences Research and Technology Support (icSPORTS 2016), pages 101-108
ISBN: 978-989-758-205-9
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
101

information on previous motion performances a very
valuable feedback in future. Therefore, the aim of this
work was to develop a wearable framework for appli-
cation in motor style assessment and training of mid-
level ski jumping.
2 DATA COLLECTION
85 ski jumps were collected during summer ski jump
season from four different junior athletes (three ski
jumpers and one Nordic Combined athlete) at a nor-
mal hill with a K-point (indicating the hill’s steep-
est point) of 90 meters. The motion of every athlete
was captured with nine waterproof inertial measure-
ment units of 16 bit quantization rate (Logical Prod-
uct, 2015). The measurement units were of 67x26x8
mm size and 20 g weight and had an internal memory
capacity of 32 MB with an average operation time of
3 hours. Every device contained triads of gyroscopes,
accelerometer and magnetometer for the respective x,
y and z axes. The gyroscopes were specified with a
full-scale range of ±1500 dps with 0.67 mV/dps sen-
sitivity. Accelerometer specification varied in depen-
dence on the placement between either a minimum
full-scale range of ±5 G (body placement) or ±16 G
(ski placement) with 191.7 mV/G sensitivity. Mag-
netic field sensors had ±1.2 Ga full-scale range. All
sensor modules were sampled at sf
S
= 500 Hz.
The sensors were positioned to measure motion of
all limbs and segments relevant for the execution of a
ski jump. The forearms for example were not exclu-
sively captured, since the elbow joints in ski jump-
ing are mostly rigid and the forearms moved in equal
terms with the upper arms. In concrete, the follow-
ing sensor positions were chosen: pelvis and both left
and right thigh, shank, ski close to the tip of the ski
boot and upper arm of the athletes (Figure 1). The
sensors were securely placed directly on the athlete’s
body and ski using adhesive and kinesiology tape be-
fore the beginning of data acquisition.
Since the quality of a ski jump is defined by a
mix of measurable jump properties (length, wind) and
jury-based style assessment, we furthermorecollected
the jump length and style scores of every jump. Both
measures were annotated on paper by an experienced
ski jump judge in real-time and under real judging cir-
cumstances from the judge’s tower. After data acqui-
sition, all score sheets were digitized to serve as an
indicator for the quality of a motion performance in
the following.
Figure 1: Nine sensors were attached to the athlete’s body
and ski to capture the ski jumps.
3 DERIVATION OF BODY
KINEMATICS
Despite the need for quantitative data, only a few
studies addressed the use of inertial sensors for perfor-
mance assessment in ski jumping so far (Ohgi et al.,
2009; Lee et al., 2015; B¨achlin et al., 2010; Chardon-
nens et al., 2012; Chardonnens et al., 2013). This
is mainly due to the sparse raw data: inertial sen-
sors measure acceleration, gravity and magnetic field
information, which can generally not display all in-
formation necessary for a complete motion analysis.
Simple characteristics and anomalies of a motion per-
formance can be found from the raw data with statis-
tical measures or spectral Fourier and wavelets filters.
Body segment orientations and joint positions, as they
can be obtained with other motion capture technolo-
gies, cannot be derived immediately and have to be
computed in a post processing step. Various meth-
ods to determine significant information from iner-
tial sensor data have been developed within the last
decade (Madgwick et al., 2011; Euston et al., 2008;
Yun and Bachmann, 2006). For the current study, we
used an independent processing framework that we
specially developed for the determination of full-body
kinematics in ski jumping.
Starting with a raw data input, the processing
framework consisted of the following sequence of
computation steps: (1) determination of initial sensor
orientations with an algorithm based on trigonometric
relations in the field measurement vectors (Yun et al.,
2008), (2) compensation of magnetic disturbances to
correctly align every sensor to the global reference
frame, (3) estimation of sensor orientation estimation
by a Complementary Filter (Euston et al., 2008), (4)
sensor-bone alignment to adhere for variations in the
sensor placement and to determine body segment ori-
entations, and (5) computation of relative joint posi-
tions with a forward kinematics approach using man-
icSPORTS 2016 - 4th International Congress on Sport Sciences Research and Technology Support
102
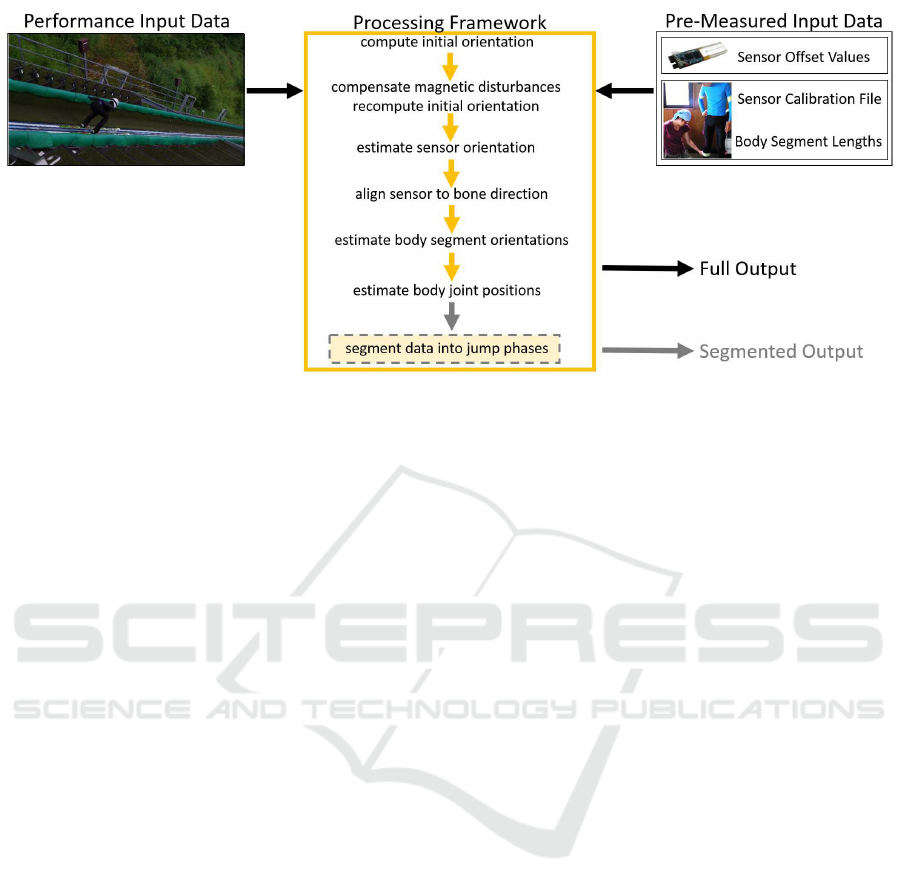
Figure 2: Schematic overview of the processing framework with initial attitude estimation, compensation of magnetic bias,
sensor orientation estimation, sensor alignment and computation of the output body kinematics.
ually measured segment lengths. By the latter two
steps, the system’s output data in form of kinematic
motion information was provided. Furthermore, we
annotated the time instants of the two characteristic
key-events take-off and landing on the base of the raw
sensor data. Every data capture could then be seg-
mented into its main motion phases in-run, flight and
landing, which yielded an additional data output of
phase-wise body kinematics (Figure 2).
The system accuracy has been successfully tested
in a previous work, where it showed errors of 1 − 3
degrees for the initial orientation estimates and drift
errors of less than 5 degrees over the complete data
capture respectively ski jump.
4 CREATION OF INTELLIGENT
MOTION KNOWLEDGE
After the derivation of accurate and reliable kinematic
motion information, the question was how to trans-
form the obtained data into a meaningful description
(respectively feedback information) of the performed
motion. Similar to the complex knowledge of the
human brain, which acquired the ability to perceive
and understand motion performances during years of
practice and experience, machine learning algorithms
should be utilized to create an artificial intelligent mo-
tion understanding for this task.
4.1 Quality Measure
As a first step, it was necessary to determine a mean-
ingful ground truth measure that could describe all
relevant motion information and that could be used
for the training of the machine knowledge. Criteria
for style assessment are based on the biomechanical
descriptions of the motion and are designed in such
a way that they are universally valid and independent
of an athlete’s anthropometric properties. Good mo-
tion technique is generally also correlating to a higher
flight curve and a longer jump. Therefore, we decided
to use the collected style scores as a ground truth for
this investigation.
According to the official scoring system speci-
fied by the International Ski Federation (FIS, 2013),
marks are not given for good style, but deducted for
faults. A perfect jump is awarded with a maximal
style measure of 20 points per judge, and errors and
deviations from the desired motion style in the motion
phases flight, landing and outrun are fined by distract-
ing points from the maximum score. Faulty behavior
during the flight phase and the landing can be pun-
ished with a maximum point deduction of 5 marks
each and during the outrun with a maximum point de-
duction of 7. On a fine scale, error points are deducted
under the style criteriaC shown in Table 1. They were
used to annotate the collected ski jumps in the present
work and correspond with the segmented jump phase
of flight and landing.
4.2 Machine Learning
The applicability of the mobile training system de-
pended largely on how well the processed inertial sen-
sor data could describe a motion and especially depict
all critical phases and properties that influenced its
performance quality. Especially important here was
to define meaningful feature representations that rep-
resented the structure and characteristic of the under-
lying data, and to chose and train a suitable machine
An Intelligent System for Motor Style Assessment and Training from Inertial Sensor Data in Intermediate Level Ski Jumping
103
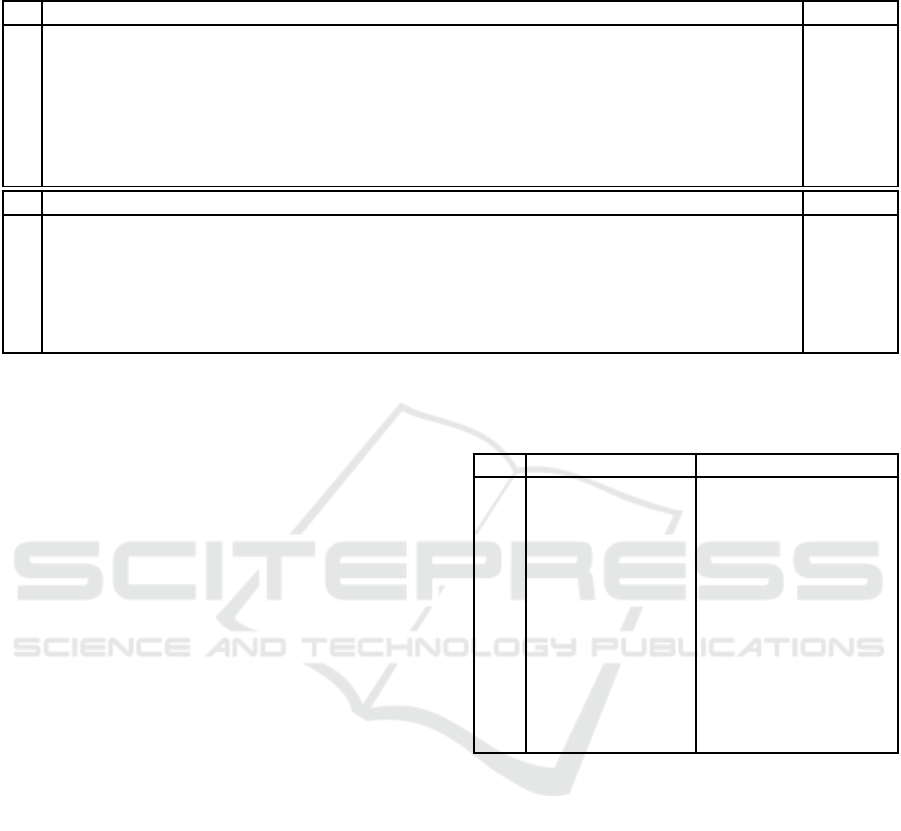
Table 1: Excerpt from official instructions on the judging of ski jump style. The presented performance errors per motion
phase A (aerial phase) and L (landing phase) and their point deductions will serve as main style reference C in the following.
A Aerial phase errors max. 5.0
1 Insufficient control over body or skis during the formation of the stable and dynamic flight
posture
0.5-2.0
2 Instability (unnecessary motion of the arms, uncontrolled body position, bent knees, not
completely stretched legs)
0.5-1.0
3 Unsymmetrical positioning of the arms 0.5-1.0
4 Unsymmetrical positioning of the legs 0.5-1.0
5 Unsymmetrical positioning or unevenness of the skis 0.5-1.0
L Landing phase errors max. 5.0
1 No Telemark landing at all (feet parallel, single fault) min.2.0
2 No smooth movement/transition from the flight pose to the landing 0.5-1.0
3 Slight Telemark landing, with little bending of the knees only 0.5-1.5
4 Insufficient absorption of the landing impact by the Telemark, or Telemark position is not
maintained until the end of the landing process (instability, too stiff or not fully executed
Telemark position)
0.5-1.5
learning method for the identification of style errors
and faulty motion executions.
4.2.1 Motion Features
Research in activity recognition from wearable sen-
sor data has resulted in a wide variety of possible
feature transformations such as statistical raw-signal
based features, event-based features, multilevel fea-
tures derived from clustered statistical occurrences
and kinematic body motion information (Bulling
et al., 2014). Many processing methods used in the
context of sports focus on low-level signal-based fea-
tures and extract information directly from the raw
sensor data (Milosevic and Farella, 2015; Dadashi
et al., 2014; Ghasemzadeh and Jafari, 2011). In
this study, we focused on body-model features de-
scribed by positional and angular data or relations be-
tween body parts and body joints. The reason for this
choice was that such ’motion property time-series’
were closest related to the biomechanical description
of the style criteria C. Besides, temporal execution of
a motion as well as correct timing of key motion pat-
terns are very important aspects of motor skill and the
training of motor sequences.
For the following investigations, we designed a
universal set of body-model features F
C
that could
also be used in similar applications for any other
movement or sports data (Helten et al., 2011). In
concrete, those features constituted the body kinemat-
ics obtained from the data processing framework (F
C1
and F
C2
), but also included further kinematic motion
information built from angular and positional rela-
tions between certain segments and joints (F
C3
and
F
C4
) (Table 2).
F
C3
was computed from the angular information
Table 2: Description of the chosen (time-series) body model
features F
C
with their feature ID for the respective three
sensor axes.
ID Type Description
F
C1
φ, θ, ψ Roll, Pitch and Yaw in
the global coordinate
frame
F
C2
x
rel
, y
rel
, z
rel
Segment end (joint)
position in the global
x,y,z coordinate frame
F
C3
∠
s1,s2
Angle between neigh-
boring body segments
s1 and s2
F
C4
x
j1, j2
, y
j1, j2
, z
j1, j2
Relative position dif-
ferences of joints j1
and j2
of two spatially related, neighboring body segments
and comprised the joint angles of highest influence
on the aerodynamic effects of a ski jump: hip, knee,
shoulder, ski elevation, ski opening and arm opening
angle. For F
C4
, the positional relations between right
and left body parts (shoulder,hands, hip, feet, ski tips)
along all three axes were used. Every feature was fur-
thermore rescaled to the interval [0, 1]. This rescaling
standardized the feature range and made the features
invariant to anthropometric differences (e.g. different
body segment lengths) between athletes.
4.2.2 Error Classification Method
Conforming to the general style assessment of ski
jumping, the basic idea for the creation of motion
feedback information was to classify an input jump as
either error jump (EJ) or non-error jump (NJ) with re-
spect to all nine chosen style criteria. To address this
icSPORTS 2016 - 4th International Congress on Sport Sciences Research and Technology Support
104
problem, we chose a straight-forward implementation
of the binary support vector machine (SVM). The
principal idea then was to determine commonalities
between two or more motion performances (meaning
motion feature streams) of the same group EJ or NJ.
To handle temporal variations in the time-serial
features, we added a data transformation based on
a weighted-sum singular value decomposition be-
fore the main computation of the SVM (Li et al.,
2005). This strategy can represent temporal informa-
tion within a lower dimension as the concatenation
of the projected first singular vector to the first prin-
cipal component and the normalized singular value
vector of the motion matrix. Closeness between two
data streams is then registered if their resulting re-
duced feature vectors are of similar value, and differ-
ence if their vector elements are dissimilar. After fea-
ture transformation, the single feature vectors could
be concatenated and used as input data for the SVM.
For the validation and evaluation of a machine
learning system, it is common to have at least two
different data sets: one used to learn the system and
one used to test the trained system. To produce such
a data base split within the 85 ski jump captures, we
made use of the A and L phase-wise ground truth style
annotations. For every C, the numbers of EJ and NJ
jumps were determined and half of each jumps and
their respective phase-annotated feature streams ran-
domly assigned to the training data base. All remain-
ing jumps were assigned to the testing database. To
become more robust against random influences of the
splitting process into training and testing database,
we chose to use a k-fold cross validation (CV) with
k= 2. This means that the classification was per-
formed twice, whereas all data was used once for
training and once for testing. To improve results, we
furthermore added an internal 2-fold CV cycle for the
training of the model parameters of the SVM to the
main cycle, leading to a nested k-fold CV (Figure 3).
Figure 3: Schematic overview of the implemented nested
cross-validation for the learning and validation of the intel-
ligent machine knowledge.
5 RESULTS
As a measure for the classification accuracy we com-
puted the precision and recall of the error annotation
in the testing data, whereas the precision and recall
values of both k-fold validation steps were averaged
to yield a final output. Under the given problem, pre-
cision (P) was defined as the number of correctly clas-
sified errors n
tp
dividedby the number of all classified
errors n
tp
+n
f p
. Recall (R) was defined as the number
of correctly classified errors n
tp
divided by the num-
ber of all elements that are actual errors n
tp
+ n
fn
for
every C:
P =
n
tp
n
tp
+ n
f p
, R =
n
tp
n
tp
+ n
fn
. (1)
Precision could hence be thought of as a measure of
the classification’s exactness, and recall as a measure
of the classification’s completeness.
In general, a low precision can indicate a large
number of false positives n
f p
, and a low recall many
false negatives n
fn
. Ideally, both measures should
be close to 1 to show a good error recognition accu-
racy. Results of the nested CV showed that the imple-
mented system was capable to retrieve errors of good
accuracy in all style criteria C, and of high accuracy
in most C, by either high P or R values (Figure 4).
A1 A2 A3 A4 A5 L1 L2 L3 L4
0
0.2
0.4
0.6
0.8
1
Error Recognition Precision
A1 A2 A3 A4 A5 L1 L2 L3 L4
0
0.2
0.4
0.6
0.8
1
Error Recognition Recall
Figure 4: Precision and recall for the error recognition along
all style criteria C. In a perfect retrieval, both metrics would
be 1.
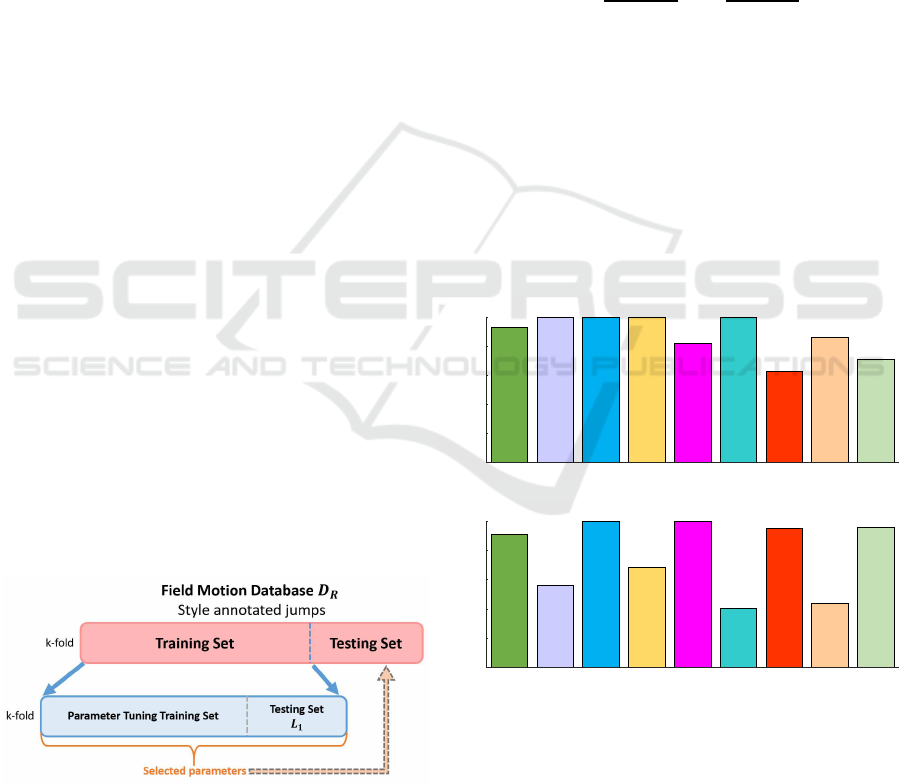
To obtain a combined accuracy measure repre-
senting all relevantclassification statistics, we further-
more computed the normalized confusion matrices of
all C (Figure 5). They contained the retrieval parame-
ters n
tp
, n
f p
, n
fn
and the number of true negatives n
tn
,
whereas a good classification was depicted by high
An Intelligent System for Motor Style Assessment and Training from Inertial Sensor Data in Intermediate Level Ski Jumping
105
A1
Actual
Predicted
A2
Actual
Predicted
A3
Actual
Predicted
A4
Actual
Predicted
A5
Actual
Predicted
L1
Actual
Predicted
L2
Actual
Predicted
L3
Actual
Predicted
L4
Actual
Predicted
Figure 5: Confusion matrices for the error recognition along
all style criteria C. The darker the color along the diagonal
axis (first and fourth quadrant), the better the classification.
values along the diagonal axis (first and fourth quad-
rant) of the matrix:
n
tp
n
f p
n
fn
n
tn
In the present visualization, high values were denoted
as black and low values (with a min value 0) as white.
Looking at the classification accuracy of every C,
we realized that the features of precise error recogni-
tion were those features with clearly defined motion
properties (e.g. A2, A3 and A5). Features of less ac-
curate error recognition on the other hand were gener-
ally less specific with respect to their definition in the
judging criteria (e.g. L2, L3, L4). One explanation
here could be that such error annotations got inter-
fused within the process of ground truth data acqui-
sition, since their description was of similar seman-
tic content. Further improvement of the results might
therefore be achievedby a larger collection of training
data for the classifier and more robust groundtruth an-
notations. This could be achieved by simultaneously
collecting style evaluations from several judges that
would then be averaged and reduce the influence of
misperception.
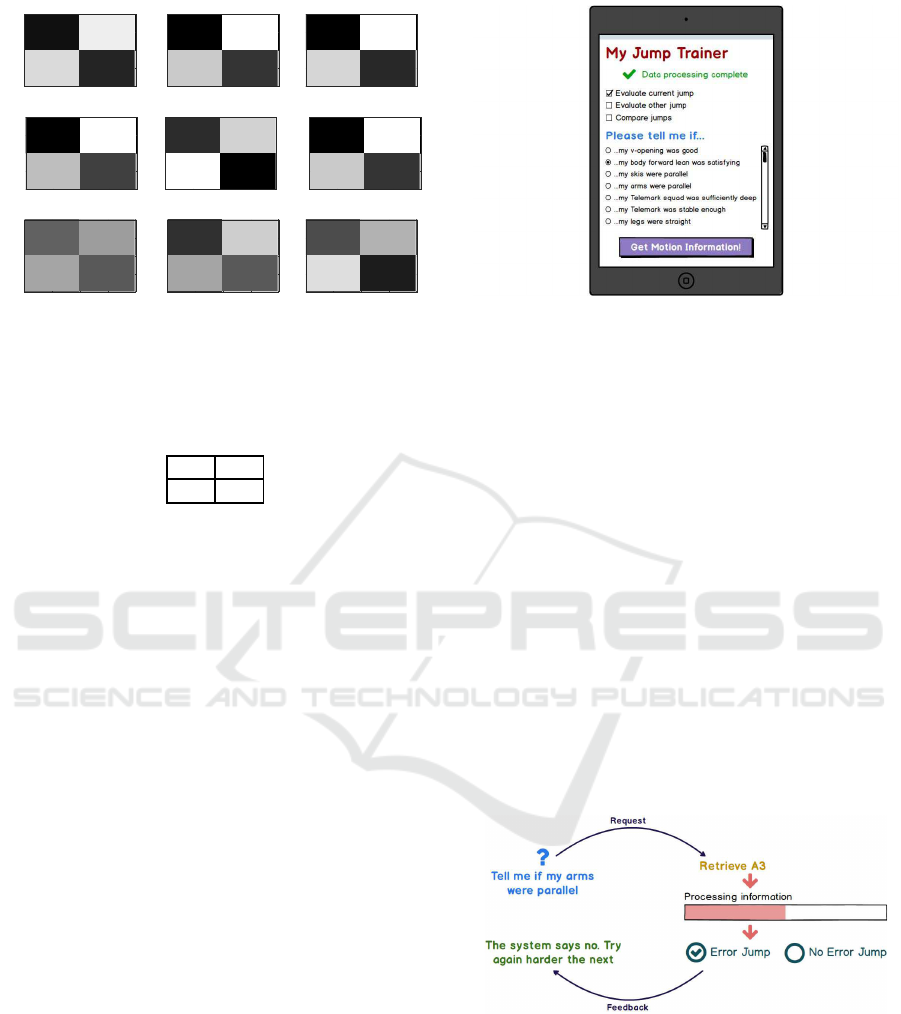
6 USE IN TRAINING SYSTEM
Knowing the accuracy of the system, the error recog-
nition method should be used for the provision of
motion feedback and style information to the athlete
in the last step. The idea here was to implement a
graphical user interface that can communicate with
the athlete to give directed feedback on the motion
(Figure 6).
In concrete, the design of the athlete-system com-
munication should be as follows. First, incoming
Figure 6: Sample implementation of a graphical user inter-
face for the provision of directed feedback to the athlete.
sensor data of a current motion performance is re-
ceived, processed and classified under the style cri-
teria C. Once the basic system computation is done,
the athlete can ask for specific information on mo-
tion parts or motion properties by sending retrieval
requests. Next, the respective information will be re-
trieved and delivered to the user.
Here, it is important to note that search criteria and
keywords for communication with the training system
were held general and intuitive by pre-defined search
queries. Internally, those search queries were associ-
ated to one of the nine style criteria for information
retrieval. A possible query in the user front end could
for example be whether the arms have been held par-
allel during flight. In the back end this information
would be labeled under the criteria A3, and the respec-
tive error recognition result for A3 could therefore be
used to display an either positive (in case of NJ) or
negative (in case of EJ) output feedback (Figure 7).
Figure 7: Sample overlook on the dialog between athlete
and training system.
7 CONCLUSION AND OUTLOOK
In this work, we presented a novel approach for the
provision of automatic motion feedback on the base
of biomechanical style criteria for intermediate level
ski jumping. First, motion performances were cap-
icSPORTS 2016 - 4th International Congress on Sport Sciences Research and Technology Support
106

tured using nine inertial sensors. The inertial sensor
data were then processed, so that relevant motion in-
formation and body kinematics were obtained. Next,
a fundamental intelligent motion understanding de-
fined by the guidelines for ski jump style assessment
was built from the augmented motion data. This ma-
chine knowledge could then be used to provide mo-
tion feedback information to the athlete by simple
pre-annotated search queries.
Validation of the underlying system methods
showed that the system was capable to identify style
differences and errors well. To enable a more specific
training system for individual athletes, it might next
be reasonable to use different quality measures inde-
pendent of universal style criteria. This could for ex-
ample mean to include numerical parameters known
to influence a ski jump performance such as the body
forward angle or the ski attack angle. Considering
that the ideal flight style varies for every athlete in
dependence on his or her individual anthropometrics
and motor skills, it could furthermore be useful to
build individual motion knowledge for every athlete.
Data could then also be used to monitor the progres-
sion of skill over time. However, this would require a
large data base of jumps per athlete before a meaning-
ful motion knowledge could be created – something
which is difficult to organize in practice.
The two biggest issues the system currently has to
face are the provision of real-time feedback, as well
as the correct handling and attachment of the motion
sensors required for a future independent system use
by athletes. Whereas the former can be addressed by
the establishment of a wireless data network for data
transmission at the ski jump hill, the latter is subject
to the user. Consequently, possible sources of error
should be held as small as possible. With the ongo-
ing process of hardware enhancement, sensors would
ideally be smaller and easier to use in future, such as
for example by inclusion within the jump suit. To im-
prove the system and verify its effect and usability, it
is furthermore sensible to test the system under real
conditions in near future.
All in all, we believe that the developedsystem is a
very promising and powerful approach to the question
of future motor training systems. We have shown that
it is possible to provide and directly deliver motion
information by learned machine knowledge. Espe-
cially in intermediate level sports – where the internal
representation of a motor task is unstable and coach-
ing feedback might be unavailable or incomplete –
augmented motion information acquired by means of
such mobile platform could considerably support cor-
rect motor skill acquisition. Ideally, it could enhance
the training environment, and hence contribute to im-
proved motor understanding, motor skill acquisition
and safety.
REFERENCES
B¨achlin, M., Kusserow, M., Tr¨oster, G., and Gubelmann, H.
(2010). Ski jump analysis of an olympic champion
with wearable acceleration sensors. In 2010 Inter-
national Symposium on Wearable Computers (ISWC),
pages 1–2. IEEE.
Bulling, A., Blanke, U., and Schiele, B. (2014). A tuto-
rial on human activity recognition using body-worn
inertial sensors. ACM Computer Survey, 46(3):33:1–
33:33.
Chardonnens, J., Favre, J., Cuendet, F., Gremion, G., and
Aminian, K. (2013). A system to measure the kine-
matics during the entire ski jump sequence using iner-
tial sensors. Journal of Biomechanics, 46(1):56–62.
Chardonnens, J., Favre, J., Le Callennec, B., Cuendet, F.,
Gremion, G., and Aminian, K. (2012). Automatic
measurement of key ski jumping phases and tempo-
ral events with a wearable system. Journal of Sports
Sciences, 30(1):53–61.
Dadashi, F., Millet, G., and Aminian, K. (2014). Estima-
tion of front-crawl energy expenditure using wearable
inertial measurement units. IEEE Sensors Journal,
14(4):1020–1027.
Euston, M., Coote, P., Mahony, R., Kim, J., and Hamel, T.
(2008). A complementary filter for attitude estimation
of a fixed-wing uav. In IEEE/RSJ International Con-
ference on Intelligent Robots and Systems, 2008. IROS
2008., pages 340–345. IEEE.
FIS (2013). The international ski competition rules (ICR).
Book III. Ski jumping.
Ghasemzadeh, H. and Jafari, R. (2011). Coordination
analysis of human movements with body sensor net-
works: A signal processing model to evaluate baseball
swings. IEEE Sensors Journal, 11(3):603–610.
Helten, T., Brock, H., M¨uller, M., and Seidel, H.-P. (2011).
Classification of trampoline jumps using inertial sen-
sors. Sports Engineering, 14(2-4):155–164.
Lee, T. J., Zihajehzadeh, S., Loh, D., Hoskinson, R., and
Park, E. J. (2015). Automatic jump detection in ski-
ing/snowboarding using head-mounted mems inertial
and pressure sensors. Proceedings of the Institution
of Mechanical Engineers, Part P: Journal of Sports
Engineering and Technology, 229(4):278–287.
Li, C., Khan, L., and Prabhakaran, B. (2005). Real-
time classification of variable length multi-attribute
motions. Knowledge and Information Systems,
10(2):163–183.
Logical Product (2015). Sports sensing 9-axial water-
proof inertial sensor (ss-ws1215/ss-ws1216). Ac-
cessed 2015-10-17.
Madgwick, S. O., Harrison, A. J., and Vaidyanathan, R.
(2011). Estimation of imu and marg orientation us-
ing a gradient descent algorithm. In 2011 IEEE
An Intelligent System for Motor Style Assessment and Training from Inertial Sensor Data in Intermediate Level Ski Jumping
107

International Conference on Rehabilitation Robotics
(ICORR), pages 1–7. IEEE.
Marqu´es-Bruna, P. and Grimshaw, P. (2009a). Mechanics of
flight in ski jumping: Aerodynamic stability in pitch.
Sports Technology, 2(1-2):24–31.
Marqu´es-Bruna, P. and Grimshaw, P. (2009b). Mechanics
of flight in ski jumping: aerodynamic stability in roll
and yaw. Sports Technology, 2(3-4):111–120.
Milosevic, B. and Farella, E. (2015). Wearable inertial sen-
sor for jump performance analysis. In Proceedings of
the 2015 Workshop on Wearable Systems and Appli-
cations, WearSys ’15, pages 15–20, New York, NY,
USA. ACM.
Ohgi, Y., Hirai, N., Murakami, M., and Seo, K. (2009).
Aerodynamic study of ski jumping flight based on in-
ertia sensors (171). In The Engineering of Sport 7,
pages 157–164. Springer.
Seo, K., Murakami, M., and Yoshida, K. (2004). Optimal
flight technique for v-style ski jumping. Sports Engi-
neering, 7(2):97–103.
Yun, X. and Bachmann, E. R. (2006). Design, implemen-
tation, and experimental results of a quaternion-based
kalman filter for human body motion tracking. IEEE
Transactions on Robotics, 22(6):1216–1227.
Yun, X., Bachmann, E. R., and McGhee, R. B. (2008).
A simplified quaternion-based algorithm for orienta-
tion estimation from earth gravity and magnetic field
measurements. IEEE Transactions on Instrumentation
and Measurement, 57(3):638–650.
icSPORTS 2016 - 4th International Congress on Sport Sciences Research and Technology Support
108
