
Model-Intersection Problems with Existentially Quantified Function
Variables: Formalization and a Solution Schema
Kiyoshi Akama
1
and Ekawit Nantajeewarawat
2
1
Information Initiative Center, Hokkaido University, Sapporo, Hokkaido, Japan
2
Computer Science, Sirindhorn International Institute of Technology, Thammasat University, Pathumthani, Thailand
Keywords:
Model-Intersection Problem, Extended Clause, Function Variable, Equivalent Transformation.
Abstract:
Built-in constraint atoms play a very important role in knowledge representation and are indispensable for
practical applications. It is very natural to use built-in constraint atoms together with user-defined atoms when
formalizing logical problems using first-order formulas. In the presence of built-in constraint atoms, however,
the conventional Skolemization in general preserves neither the satisfiability nor the logical meaning of a
given first-order formula, motivating us to step outside the conventional Skolemization and the usual space of
first-order formulas. We propose general solutions for proof problems and query-answering (QA) problems
on first-order formulas possibly with built-in constraint atoms. We map, by using new meaning-preserving
Skolemization, all proof problems and all QA problems, preserving their answers, into a new class of model-
intersection (MI) problems on an extended clause space, where clauses are in a sense “higher-order” since they
may contain not only built-in constraint atoms but also function variables. We propose a general schema for
solving this class of MI problems by equivalent transformation (ET), where problems are solved by repeated
simplification using ET rules. The correctness of this solution schema is shown. Since MI problems in this
paper form a very large class of logical problems, this theory is also useful for inventing solutions for many
classes of logical problems.
1 INTRODUCTION
A proof problem is a “yes/no” problem; it is con-
cerned with checking whether or not one given logical
formula entails another given logical formula. For-
mally, a proof problem is a pair hE
1
,E
2
i, where E
1
and E
2
are first-order formulas, and the answer to this
problem is defined to be “yes” if E
2
is a logical con-
sequence of E
1
, and it is defined to be “no” otherwise.
A proof problem hE
1
,E
2
i is solved (Chang and Lee,
1973; Robinson, 1965) by (i) constructing the formula
E = (E
1
∧ ¬E
2
), since the unsatisfiability of E means
that the answer of this proof problem is “yes”, (ii)
conversion of E into a set Cs of clauses using the con-
ventional Skolemization (Chang and Lee, 1973; Fit-
ting, 1996), (iii) transformation of the clause set Cs
by the resolution and factoring inference rules, and
(iv) determining the answer by checking whether an
empty clause can be obtained, i.e., if an empty clause
is obtained, then Cs is unsatisfiable and the answer to
the proof problem is “yes”. This solution relies on
the preservation of satisfiability. The conversion of
E into Cs using the conventional Skolemization pre-
serves the satisfiability of E. Transformation of Cs
by using resolution and factoring also preserves the
satisfiability of Cs.
A query-answering problem (QA problem) on
clauses is a pair hCs,ai, where Cs is a set of clauses
and a is a user-defined query atom. The answer to
a QA problem hCs,ai is defined as the set of all
ground instances of a that are logical consequences
of Cs. Characteristically, a QA problem is an “all-
answers finding” problem, i.e., all ground instances of
a given query atom satisfying the requirement above
are to be found. In our previous work (Akama and
Nantajeewarawat, 2015a), for solving proof prob-
lems on first-order formulas and QA problems on
clauses, these problems are transformed into model-
intersection problems (MI problems) on the conven-
tional clause space. Such a MI problem is a pair
hCs,ϕi, where Cs is a set of clauses and ϕ is a map-
ping, called an exit mapping, used for constructing
the output answer from the intersection of all models
of Cs. More formally, the answer to a MI problem
hCs,ϕi is ϕ(
T
Models(Cs)), where Models(Cs) is the
set of all models of Cs and
T
Models(Cs) is the inter-
52
Akama, K. and Nantajeewarawat, E.
Model-Intersection Problems with Existentially Quantified Function Variables: Formalization and a Solution Schema.
DOI: 10.5220/0006056800520063
In Proceedings of the 8th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2016) - Volume 2: KEOD, pages 52-63
ISBN: 978-989-758-203-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
section of all elements of Models(Cs). Note that, in
this theory, an interpretation is a set of ground user-
defined atoms, which is similar to a Herbrand inter-
pretation (Chang and Lee, 1973; Fitting, 1996). Since
each element of Models(Cs) is a set of ground user-
defined atoms, we can take the intersection of all ele-
ments of it.
In this paper, we consider first-order formulas that
possibly includes built-in constraint atoms. The set of
all such formulas is denoted by FOL
c
. Built-in con-
straint atoms play a crucial role in knowledge repre-
sentation and are essential for practical applications.
One of the objectives of this paper is to propose gen-
eral solutions for proof problems and QA problems
on FOL
c
, which are large problem classes that have
never been solved fully so far. The classical theorem-
proving theory motivates us to transform proof prob-
lems and QA problems on FOL
c
into MI problems
on clauses by the conventional Skolemization (Chang
and Lee, 1973; Fitting, 1996). However, satisfiabil-
ity preservation of a formula does not generally hold
for formulas in FOL
c
(Akama and Nantajeewarawat,
2015b). The conventional Skolemization, therefore,
does not provide a transformation process towards
correct solutions for proof problems and QA prob-
lems on FOL
c
.
Meaning-preserving Skolemization (MPS) was
invented(Akama and Nantajeewarawat, 2008; Akama
and Nantajeewarawat, 2011) to overcome the difficul-
ties caused by the conventional Skolemization. MPS
preserves the logical meanings of first-order formu-
las (and, thus, also preserves their satisfiability) even
when they include built-in constraint atoms. Con-
ventional clauses should be extended in order that
all first-order formulas in FOL
c
can be equivalently
converted by MPS. An extended clause may contain
function variables and atoms of a special kind called
func-atoms. The set of all extended clauses is called
ECLS
F
.
This paper introduces a model-intersection prob-
lem (MI problem) on this extended space, which is
a pair hCs,ϕi, where Cs is a set of extended clauses
and ϕ is an exit mapping. The set of all MI problems
on the extended clauses constitutes a very large class
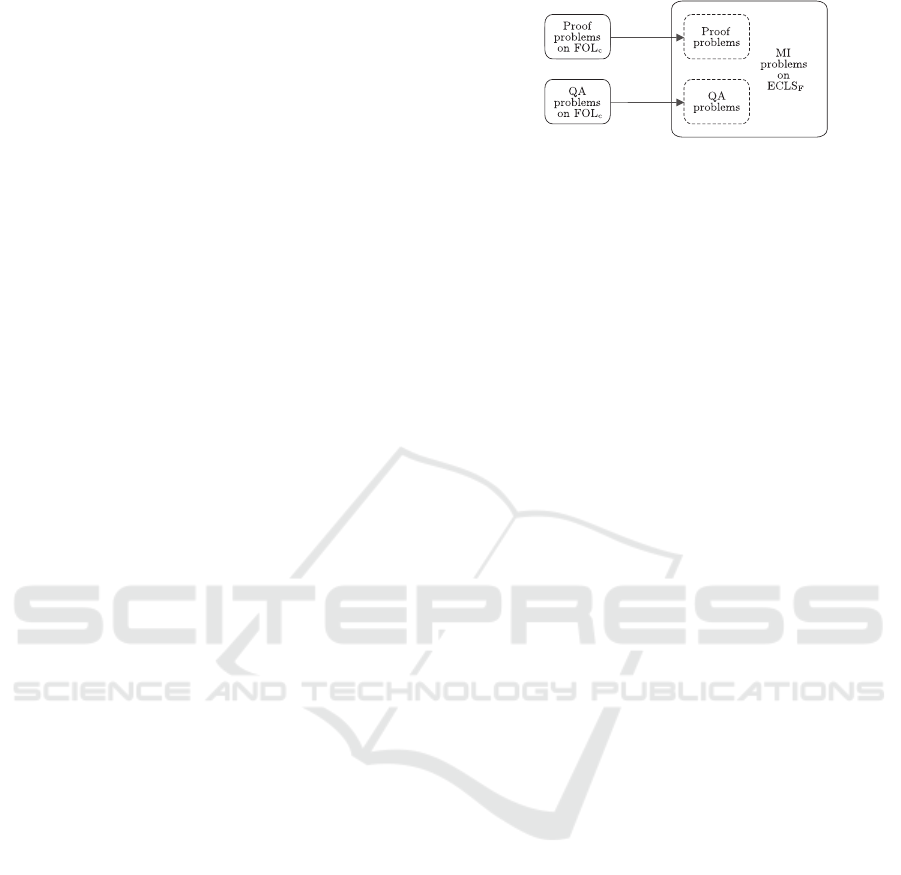
of problems and is of great importance. As outlined
by Fig. 1, all proof problems and all QA problems
on FOL
c
are mapped, preserving their answers, into
MI problems on ECLS
F
. By solving MI problems on
ECLS
F
, we solve proof problems and QA problems
on FOL
c
. We propose a general schema for solving
MI problems on ECLS
F
by equivalent transformation
(ET), where problems are solved by repeated problem
simplification using ET rules.
The class of MI problems established in this pa-
Figure 1: MI-problem-centered view of logical problems.
per is the largest and the first one that enables struc-
tural embedding of the full class of proof problems
on FOL
c
and the full class of QA problems on FOL
c
.
The class of MI problems considered in our previous
work (Akama and Nantajeewarawat, 2015a) involves
only usual clauses (with no function variable being
allowed) and is not sufficient for dealing with proof
problems and QA problems on FOL
c
entirely.
The rest of the paper is organized as follows: Sec-
tion 2 defines extended clauses and ECLS
F
, and intro-
duces meaning-preserving Skolemization. Section 3
formalizes MI problems on extended clauses and de-
scribes how QA problems and proof problems can be
convertedinto MI problems. Section 4 presents a gen-
eral schema for solving MI problems by ET. Section 5
demonstrates an application of the general schema.
Section 6 concludes the paper.
The notation that follows holds thereafter. Given
a set A, pow(A) denotes the power set of A. Given
two sets A and B, Map(A,B) denotes the set of all
mappings from A to B, and for any partial mapping
f from A to B, dom( f) denotes the domain of f, i.e.,
dom( f) = {a | (a ∈ A) & ( f(a) is defined)}.
2 AN EXTENDED CLAUSE SPACE
2.1 User-defined Atoms, Built-in
Constraint Atoms, and func-Atoms
An extended formula space is introduced, which con-
tains three kinds of atoms, i.e., user-defined atoms,
built-in constraint atoms, and func-atoms. A user-
defined atom takes the form p(t
1
,...,t
n
), where p is a
user-defined predicate and the t
i
are usual terms. Sup-
posing that teach, St, and FM are user-defined pred-
icates, teach(john,ai), St(paul), and FM(x) are user-
defined atoms (cf. Fig. 3 in Section 5). A built-in con-
straint atom, also simply called a constraint atom or
a built-in atom, takes the form c(t
1
,...,t
n
), where c is
a predefined constraint predicate and the t
i
are usual
terms. Typical examples of built-in constraint atoms
are eq(x,x) and neq(1,2), where eq and neq are prede-
fined constraint predicates that stand for “equal” and
“not equal,” respectively. (No built-in constraint atom
Model-Intersection Problems with Existentially Quantified Function Variables: Formalization and a Solution Schema
53

appears in Fig. 3.) Let A
u
be the set of all user-defined
atoms, G
u
the set of all ground user-defined atoms, A
c
the set of all constraint atoms, and G
c
the set of all
ground constraint atoms.
A func-atom (Akama and Nantajeewarawat,2011)
is an expression of the form func( f,t
1
,...,t
n
,t
n+1
),
where f is either an n-ary function constant or an n-
ary function variable, and the t
i
are usual terms. For
example, supposing that f
0
is a unary function vari-
able, func( f
0
,x,y) is a func-atom (cf. the clauses C
24
andC
25
in Fig. 3). A func-atom func( f,t
1
,...,t
n
,t
n+1
)
is ground if f is a function constant and the t
i
are
ground usual terms.
There are two types of variables: usual variables
and function variables. (In Fig. 3, x, y, z, and w are
usual variables, while f
0
is a function variable.) A
function variable is instantiated into a function con-
stant or a function variable, but not into a usual term.
Let FVar be the set of all function variables and
FCon the set of all function constants. A substitu-
tion for function variables is a mapping from FVar to
FVar∪ FCon. Each n-ary function constant is associ-
ated with a mapping from G
n
t
to G
t
, where G
t
denotes
the set of all usual ground terms.
2.2 Extended Clauses
User-defined atoms and built-in constraint atoms are
used in usual clauses, which are extended by allow-
ing func-atoms to appear in their right-hand sides. An
extended clause C is a formula of the form
a
1
,...,a
m
← b
1
,...,b
n
,f
1
,...,f
p
,
where each of a
1
,...,a
m
,b
1
,...,b
n
is a user-defined
atom or a built-in constraint atom, f
1
,...,f
p
are func-
atoms, and m, n, and p are non-negative integers.
All usual variables occurring in C are implicitly uni-
versally quantified and their scope is restricted to
the extended clause C itself. The sets {a
1
,...,a
m
}
and {b
1
,...,b
n
,f
1
,...,f
p
} are called the left-hand side
and the right-hand side, respectively, of the extended
clause C, and are denoted by lhs(C) and rhs(C), re-
spectively. Let userLhs(C) denote the number of
user-defined atoms in the left-hand side of C. When
userLhs(C) = 0, C is called a negative extended
clause. When userLhs(C) = 1,C is called an extended
definite clause. When userLhs(C) > 1, C is called a
multi-head extended clause.
When no confusion is caused, an extended clause,
a negative extended clause, an extended definite
clause, and a multi-head extended clause are also
called a clause, a negative clause, a definite clause,
and a multi-head clause, respectively.
Let DCL denote the set of all extended definite
clauses with no constraint atom in their left-hand
sides. Given a definite clause C ∈ DCL, the user-
defined atom in lhs(C) is called the head of C, de-
noted by head(C), and the set rhs(C) is called the
body of C, denoted by body(C).
2.3 An Extended Clause Space
A conjunction of a finite or infinite number of ex-
tended clauses is used for knowledge representation
and also for computation. As usual, such a conjunc-
tion is usually dealt with by regarding it as a set of
(extended) clauses. The set of all extended clauses is
denoted by ECLS
F
. The extended clause space in this
paper is the powerset of ECLS
F
.
Let Cs be a set of extended clauses. Implicit ex-
istential quantifications of function variables and im-
plicit clause conjunction are assumed in Cs. Func-
tion variables in Cs are all existentially quantified and
their scope covers all clauses in Cs. With occurrences
of function variables, clauses in Cs are connected
through shared function variables. After instantiating
all function variables in Cs into function constants,
clauses in the instantiated set are totally separated.
2.4 Conversion of First-order Formulas
into Sets of Extended Clauses
Semantically, an extended clause corresponds to a
disjunction of extended literals, and a set of ex-
tended clauses corresponds to an extended conjunc-
tive normal form. After explaining the limitations
of the conventional Skolemization, conversion of a
first-order formula in FOL
c
into a set of extended
clauses in ECLS
F
by meaning-preserving Skolemiza-
tion (Akama and Nantajeewarawat, 2008; Akama and
Nantajeewarawat, 2011) is introduced.
2.4.1 Conventional Skolemization
In the conventional proof theory, a first-order formula
is usually converted into a conjunctive normal form
in the usual first-order formula space. The conver-
sion involves removal of existential quantifications by
Skolemization (Chang and Lee, 1973; Fitting, 1996),
i.e., by replacement of an existentially quantified vari-
able with a Skolem term determined by its relevant
quantification structure. Let CSK(E) denote the set
of usual clauses obtained by applying this conversion
to a first-order formula E.
The conventional Skolemization, however, does
not generally preserve the logical meaning of a first-
order formula in FOL
c
, nor the satisfiability thereof.
This is precisely shown by Theorem 1 below. Given a
first-order formula E in FOL
c
and a set Cs of extended
KEOD 2016 - 8th International Conference on Knowledge Engineering and Ontology Development
54

clauses in ECLS
F
, let Models(E) and Models(Cs) de-
note the set of all models of E and that of all models
of Cs, respectively.
Theorem 1.
1. There are a first-order formula E in FOL
c
and a
clause set Cs ⊆ ECLS
F
such that CSK(E) = Cs
and Models(E) 6= Models(Cs).
2. There are a first-order formula E in FOL
c
and a
clause set Cs ⊆ ECLS
F
such that CSK(E) = Cs,
Models(E) 6= ∅, and Models(Cs) = ∅.
Proof: Assume that:
• noteq is a predicate for built-in constraint atoms
and for any ground terms t
1
and t
2
, noteq(t
1
,t
2
) is
true iff t
1
6= t
2
.
• F
1
, F
2
, F
3
, and F
4
are the first-order formulas in
FOL
c
given by:
F
1
: ∀x∀y∀z : [(hasChild(x,y) ∧ hasChild(x,z)
∧ noteq(y,z)) → TaxCut(x)]
F
2
: hasChild(Peter,Paul)
F
3
: ∃x : hasChild(Peter, x)
F
4
: ¬(∃x : TaxCut(x))
Consider a first-order formula E = F
1
∧ F
2
∧ F
3
∧ F
4
.
Obviously, Models(E) 6= ∅ and a model of E is
{hasChild(Peter,Paul)}. Let CSK(E) = Cs. Then
Cs consists of the following clauses, where f is a new
constant:
TaxCut(x) ← hasChild(x,y),hasChild(x,z),
noteq(y,z)
hasChild(Peter,Paul) ←
hasChild(Peter, f) ←
← TaxCut(x)
Since f is a constant and noteq(Paul, f) is true, the
clause set Cs has no model, i.e., Models(Cs) = ∅.
Hence Results 1 and 2 of this theorem hold.
2.4.2 Meaning-preserving Skolemization
In order to transform a first-order formula equiv-
alently into a set of extended clauses, meaning-
preserving Skolemization was invented in (Akama
and Nantajeewarawat, 2008; Akama and Nantajee-
warawat, 2011). Let MPS(E) denote the set of
extended clauses resulting from applying meaning-
preserving Skolemization to a given first-order for-
mula E in FOL
c
. MPS(E) is obtained from E by re-
peated subformula transformationand conversioninto
a clausal form. Consider, for example, the first-order
formula E in the proof of Theorem 1. MPS(E) is
the clause set Cs
′
consisting of the following extended
clauses, where h is a 0-ary function variable:
TaxCut(x) ← hasChild(x,y),hasChild(x,z),
noteq(y,z)
hasChild(Peter,Paul) ←
hasChild(Peter,x) ← func(h,x)
← TaxCut(x)
An algorithm for computing MPS(E) was given
in (Akama and Nantajeewarawat, 2011). Each trans-
formation used by this algorithm preserves the logical
meaning of an input formula. As a result, the next the-
orem is obvious.
Theorem 2. Let E be a first-order formula in FOL
c
and Cs ⊆ ECLS
F
. If MPS(E) = Cs, then
1. Models(E) = Models(Cs), and
2. Models(E) = ∅ iff Models(Cs) = ∅.
2.5 Interpretations and Models
A state of the world is represented by a set of true
ground atoms in G
u
. A logical formula is used to
impose a constraint on possible states of the world.
Hence, an interpretation is a subset of G
u
. A ground
user-defined atom g is true under an interpretation I
iff g belongs to I. Unlike ground user-defined atoms,
the truth values of ground constraint atoms are prede-
termined independently of interpretations. Let TCON
denote the set of all true ground constraint atoms,
i.e., a ground constraint atom g is true iff g ∈ TCON.
A ground func-atom func( f,t
1
,...,t
n
,t
n+1
) is true iff
f(t
1
,...,t
n
) = t
n+1
.
A ground clause C = (a
1
,...,a
m
← b
1
,...,b
n
,f
1
,
...,f
p
) ∈ ECLS
F
is true under an interpretation I (in
other words, I satisfies C) iff at least one of the fol-
lowing conditions is satisfied:
1. There exists i ∈ {1,...,m} such that a
i
∈ I ∪
TCON.
2. There exists i ∈ {1,...,n} such that b
i
/∈ I ∪
TCON.
3. There exists i ∈ {1,..., p} such that f
i
is false.
An interpretation I is a model of a clause set Cs ⊆
ECLS
F
iff there exists a substitution σ for function
variables that satisfies the following conditions:
1. All function variables occurring in Cs are instan-
tiated by σ into function constants.
2. For any clause C ∈ Cs and any substitution θ for
usual variables, if Cσθ is a ground clause, then
Cσθ is true under I.
Let Models be a mapping that associates with each
clause set the set of all of its models, i.e., Models(Cs)
is the set of all models of Cs for any Cs ⊆ ECLS
F
.
Model-Intersection Problems with Existentially Quantified Function Variables: Formalization and a Solution Schema
55

The standard semantics is taken in this theory in
the sense that all models of a formula are considered
instead of specific ones, such as those considered in
the minimal model semantics (Clark, 1978; Lloyd,
1987), which underlies definite logic programming,
and in the stable model semantics (Gelfond and Lifs-
chitz, 1988; Gelfond and Lifschitz, 1991), which un-
derlies answer set programming.
3 MODEL-INTERSECTION
PROBLEMS
3.1 Model Intersection is Important
Assume that a person A and a person B are interested
in knowing which atoms in G
u
are true and which
atoms in G
u
are false. They want to know the un-
known set G of all true ground atoms. Due to short-
age of knowledge, A still cannot identify one unique
subset of G
u
as the state of the world. The person A
can only limit possible subsets of true atoms by spec-
ifying a subset Gs of pow(G
u
). The unknown set G of
all true atoms belongs to Gs.
One way for A to inform this knowledge to B com-
pactly is to send to B a clause set Cs such that Gs ⊆
Models(Cs). Receiving Cs, B knows that Models(Cs)
includes all possible intended sets of ground atoms,
i.e., G ∈ Models(Cs). As such, B can know that each
ground atom outside
S
Models(Cs) is false, i.e., for
any g ∈ G
u
, if g /∈
S
Models(Cs), then g /∈ G. The
person B can also know that each ground atom in
T
Models(Cs) is true, i.e., for any g ∈ G
u
, if g ∈
T
Models(Cs), then g ∈ G. This shows the impor-
tance of calculating
T
Models(Cs).
3.2 Model-Intersection (MI) Problems
on the Extended Clause Space
It is natural for us to seek information about the model
intersection of given knowledge, which motivates us
to introduce a new class of logical problems.
A model-intersection problem (MI problem) on
ECLS
F
is a pair hCs,ϕi, where Cs ⊆ ECLS
F
and ϕ
is a mapping from pow(G
u
) to some set W. The map-
ping ϕ is called an exit mapping. The answer to this
problem, denoted by ans
MI
(Cs,ϕ), is defined by
ans
MI
(Cs,ϕ) = ϕ(
\
Models(Cs)),
where
T
Models(Cs) is the intersection of all models
of Cs. Note that when Models(Cs) is the empty set,
T
Models(Cs) = G
u
.
Example 1. Consider the Oedipus puzzle described
in (Baader et al., 2007). Oedipus killed his father,
married his mother Iokaste, and had children with her,
among them Polyneikes. Polyneikes also had chil-
dren, among them Thersandros, who is not a patri-
cide. The problem is to find all persons who have a
patricide child who has a non-patricide child.
Assume that (i) “oe,” “io,” “po” and “th” stand, re-
spectively, for Oedipus, Iokaste, Polyneikes and Ther-
sandros, (ii) for any terms t
1
and t
2
, isCh(t
1
,t
2
) de-
notes “t
1
is a child of t
2
,” and (iii) for any termt, pat(t)
denotes “t is a patricide” and prob(t) denotes “t is an
answer to this puzzle.” To formalize this puzzle, let
Cs
1
consist of the following seven clauses:
isCh(oe,io) ← isCh(po,io) ←
isCh(po,oe) ← isCh(th,po) ←
pat(oe) ← ← pat(th)
prob(x), pat(y) ← isCh(z,x),pat(z),isCh(y,z)
Let ϕ
1
be defined by ϕ
1
(G) = {x | prob(x) ∈ G} for
any G ⊆ G
u
. Then hCs
1
,ϕ
1
i is an MI problem repre-
senting this puzzle.
Example 2. Consider a problem of finding all lists
obtained by concatenating [1,2,3] with [4,5]. Let Cs
2
consist of the following clauses:
app([],x,x) ←
app([w|x],y,[w|z]) ← app(x,y, z)
ans(x) ← app([1, 2, 3],[4,5],x)
Let ϕ
2
be defined by ϕ
2
(G) = {x | ans(x) ∈ G} for
any G ⊆ G
u
. This problem is then formalized as the
MI problem hCs
2
,ϕ
2
i.
Example 3. Consider the “tax-cut” problem dis-
cussed in (Motik et al., 2005). This problem is to
find all persons who can have discounted tax, with
the knowledge consisting of the following statements:
(i) Any person who has two children or more can
get discounted tax. (ii) Men and women are not the
same. (iii) It is false that a person is not the same
as himself/herself. (iv) A person’s mother is always
a woman. (v) Peter has a child, who is someone’s
mother. (vi) Peter has a child named Paul. (vii) Paul
is a man. These statements are represented by the fol-
lowing eight extended clauses:
TaxCut(x) ←hasChild(x,y), hasChild(x,z),
notSame(y,z)
notSame(x,y) ← Man(x),Woman(y)
← notSame(x,x)
Woman(x) ← motherOf(x,y)
hasChild(Peter,x) ← func( f
1
,x)
motherOf(x,y) ← func( f
1
,x), func( f
2
,y)
hasChild(Peter,Paul) ←
KEOD 2016 - 8th International Conference on Knowledge Engineering and Ontology Development
56

Man(Paul) ←
The fifth and the sixth clauses together represent the
fifth statement (i.e., “Peter has a child, who is some-
one’s mother”), where f
1
and f
2
are 0-ary function
variables. Let Cs
3
consist of the above eight clauses.
Let ϕ
3
be defined by ϕ
3
(G) = {x | TaxCut(x) ∈ G}
for any G ⊆ G
u
. The “tax-cut” problem is then for-
mulated as the MI problem hCs
3
,ϕ
3
i.
Example 4. Consider the “Dreadsbury Mansion
Mystery” problem, which was given by Len Schubelt
and can be described as follows: Someone who lives
in Dreadsbury Mansion killed Aunt Agatha. Agatha,
the butler, and Charles live in Dreadsbury Mansion,
and are the only people who live therein. A killer
always hates his victim, and is never richer than his
victim. Charles hates no one that Aunt Agatha hates.
Agatha hates everyone except the butler. The butler
hates everyone not richer than Aunt Agatha. The but-
ler hates everyone Agatha hates. No one hates every-
one. The problem is to find who is the killer.
Assume that neq is a predefined binary constraint
predicate and for any ground usual terms t
1
and t
2
,
neq(t
1
,t
2
) is true iff t
1
6= t
2
. The background knowl-
edge of this mystery is formalized as a set Cs
4
consist-
ing of the following clauses, where the constants A,
B, C, and D denote “Agatha,” “the butler,” “Charles,”
and “Dreadsbury Mansion,” respectively, f
0
is a 0-ary
function variable, and f
1
is a unary function variable:
live(x,D) ← func( f
0
,x)
kill(x,A) ← func( f
0
,x)
← live(x,D),neq(x,A),neq(x,B),neq(x,C)
live(A,D) ←
live(B,D) ←
live(C,D) ←
hate(x,y) ← kill(x,y)
← kill(x,y), richer(x, y)
← hate(A,x),hate(C,x),live(x, D)
hate(A,x) ← neq(x,B),live(x, D)
richer(x,A),hate(B,x) ←
hate(B,x) ← hate(A,x)
← hate(x,y),func( f
1
,x,y),live(x,D)
live(y,D) ← live(x,D),func( f
1
,x,y)
killer(x) ← kill(x,A)
Let ϕ
4
be defined by ϕ
4
(G) = {x | killer(x) ∈ G} for
any G ⊆ G
u
. This problem is then represented as the
MI problem hCs
4
,ϕ
4
i.
Example 5. Let an exit mapping ϕ
pr
be given as fol-
lows: For any G ⊆ G
u
, ϕ
pr
(G) = “yes” if G = G
u
,
and ϕ
pr
(G) = “no” otherwise. Referring to the clause
sets Cs
1
–Cs
4
in Examples 1–4, we illustrate that proof
problems can be represented as MI problems as fol-
lows:
• Letting Cs
5
= Cs
1
∪{(← prob(io))}, the MI prob-
lem hCs
5
,ϕ
pr
i represents the problem of proving
whether prob(io) is true.
• Letting Cs
6
= Cs
2
∪ {(← ans([1,2,3,4,5]))}, the
MI problem hCs
6
,ϕ
pr
i represents the problem of
proving whether the resulting list is [1,2,3,4,5].
• Letting Cs
7
= Cs
3
∪ {(← TaxCut(x))}, the MI
problem hCs
7
,ϕ
pr
i represents the problem of
proving whether someone gets discounted tax.
• Letting Cs
8
= Cs
4
∪ {(← killer(A))}, the MI
problem hCs
8
,ϕ
pr
i represents the problem of
proving whether Agatha killed herself.
3.3 Conversion of Query-Answering
(QA) Problems into MI Problems
A query-answeringproblem (QA problem) on FOL
c
is
a pair hE,ai, where E is a closed first-order formula in
FOL
c
and a is a user-defined atom in A
u
. Let S be the
set of all substitutions for usual variables. The answer
to a QA problem hE,ai, denoted by ans
QA
(E, a), is
defined by
ans
QA
(E, a) = {aθ | (θ ∈ S) & (aθ ∈ G
u
) & (E |= aθ)}.
In logic programming (Lloyd, 1987), a problem
represented by a pair of a set of definite clauses and a
query atom has been intensively discussed. In the de-
scription logic (DL) community (Baader et al., 2007),
a class of problems formulated as conjunctions of
DL-based axioms and assertions together with query
atoms has been discussed (Tessaris, 2001). These two
problem classes can be formalized as subclasses of
QA problems considered in this paper.
Theorem 3. For any closed first-order formula E ∈
FOL
c
and any a ∈ A
u
,
ans
QA
(E, a) = rep(a) ∩ (
\
Models(E)),
where rep(a) denotes the set of all ground instances
of a.
Proof: Let E be a closed first-order formula in
FOL
c
and a ∈ A
u
. By the definition of |=, for any
ground atom g ∈ G
u
, E |= g iff g ∈
T
Models(E).
Then
ans
QA
(E, a)
= {aθ | (θ ∈ S ) & (aθ ∈ G
u
) & (E |= aθ)}
= {g | (θ ∈ S) & (g = aθ) & (g ∈ G
u
) & (E |= g)}
= {g | (g ∈ rep(a)) & (E |= g)}
= {g | (g ∈ rep(a)) & (g ∈ (
T
Models(E)))}
= rep(a) ∩ (
T
Models(E)).
Model-Intersection Problems with Existentially Quantified Function Variables: Formalization and a Solution Schema
57

Theorem 4 below shows that a QA problem on
FOL
c
can be converted into a MI problem on ECLS
F
.
Theorem 4. Let E be a first-order formula in FOL
c
and a ∈ A
u
. Let Cs ⊆ ECLS
F
. If Models(E) =
Models(Cs), then
ans
QA
(E, a) = ans
MI
(Cs∪{(p(x
1
,...,x
n
) ← a)},ϕ
qa
),
where p is a predicate that appears in neither Cs nor
a, the arguments x
1
,...,x
n
are all the mutually differ-
ent variables occurring in a, and for any G ⊆ G
u
,
ϕ
qa
(G) = {aθ | (θ ∈ S) & (p(x
1
,...,x
n
)θ ∈ G)}.
Proof: Assume that Models(E) = Models(Cs).
Then
ans
QA
(E, a)
= (by Theorem 3)
= rep(a) ∩ (
T
Models(E))
= rep(a) ∩ (
T
Models(Cs))
= (by the definition of ϕ
qa
)
= ϕ
qa
(
T
Models(Cs∪ {(p(x
1
,...,x
n
) ← a)}))
= ans
MI
(Cs∪ {(p(x
1
,...,x
n
) ← a)},ϕ
qa
).
3.4 Conversion of Proof Problems into
MI Problems
A proof problem is a pair hE
1
,E
2
i, where E
1
and E
2
are first-order formulas in FOL
c
, and the answer to
this problem, denoted by ans
Pr
(E
1
,E
2
), is defined by
ans
Pr
(E
1
,E
2
) =
“yes” if E
1
|= E
2
,
“no” otherwise.
It is well known that that E
2
is a logical consequence
of E
1
iff E
1
∧ ¬E
2
is unsatisfiable (i.e., E
1
∧ ¬E
2
has
no model) (Chang and Lee, 1973; Fitting, 1996). As
a result, ans
Pr
(E
1
,E
2
) can be equivalently defined by
ans
Pr
(E
1
,E
2
) =
“yes” if Models(E
1
∧ ¬E
2
) = ∅,
“no” otherwise.
Theorem 5 below shows that a proof problem can
be converted into a MI problem on ECLS
F
.
Theorem 5. Let hE
1
,E
2
i be a proof problem, where
E
1
and E
2
are first-order formulas in FOL
c
. Let
Cs ⊆ ECLS
F
. Let ϕ
pr
: pow(G
u
) → {“yes”,“no”} be
defined by: for any G ⊆ G
u
,
ϕ
pr
(G) =
“yes” if G = G
u
,
“no” otherwise.
If the conditions Models(E
1
∧ ¬E
2
) = ∅ and
Models(Cs) = ∅ are equivalent, then ans
Pr
(E
1
,E
2
) =
ans
MI
(Cs,ϕ
pr
).
Proof: Assume that Models(E
1
∧ ¬E
2
) = ∅ iff
Models(Cs) = ∅. Let b be a ground user-definedatom
that is not an instance of any user-defined atom occur-
ring in Cs. If m is a model of Cs, then m−{b} is also a
model of Cs. Obviously, m− {b} 6= G
u
. Therefore, (i)
if Models(Cs) 6= ∅, then
T
Models(Cs) 6= G
u
, and (ii)
if Models(Cs) = ∅, then
T
Models(Cs) =
T
{} = G
u
.
Two cases are considered:
1. Suppose that Models(E
1
∧ ¬E
2
) = ∅. Conse-
quently, Models(Cs) = ∅. So
T
Models(Cs) =
G
u
, and, therefore, ans
MI
(Cs,ϕ
pr
) = “yes”.
2. Suppose that Models(E
1
∧¬E
2
) 6= ∅. In this case,
Models(Cs) 6= ∅, and, thus,
T
Models(Cs) 6= G
u
.
So ans
MI
(Cs,ϕ
pr
) = “no”.
Hence ans
Pr
(E
1
,E
2
) = ans
MI
(Cs,ϕ
pr
).
4 SOLVING MI PROBLEMS BY
EQUIVALENT
TRANSFORMATION
A general schema for solving MI problems based on
equivalent transformation (ET) is formulated and its
correctness is shown (Theorem 10).
4.1 Preservation of Partial Mappings
and Equivalent Transformation
Terminologies such as preservation of partial map-
pings and equivalent transformation are defined in
general below. They will be used with a specific class
of partial mappings called target mappings, which
will be introduced in Section 4.2.
Assume that X and Y are sets and f is a par-
tial mapping from X to Y. For any x,x
′
∈ dom( f),
transformation of x into x
′
is said to preserve f iff
f(x) = f(x
′
). For any x,x
′
∈ dom( f), transformation
of x into x
′
is called equivalent transformation (ET)
with respect to f iff the transformation preserves f,
i.e., f(x) = f(x
′
).
Let F be a set of partial mappings from a set X
to a set Y. Given x,x
′
∈ X, transformation of x into
x
′
is called equivalent transformation (ET) with re-
spect to F iff there exists f ∈ F such that the trans-
formation preserves f. A sequence [x
0
,x
1
,...,x
n
] of
elements in X is called an equivalent transformation
sequence (ET sequence) with respect to F iff for any
i ∈ {0, 1, . . . , n − 1}, transformation of x
i
into x
i+1
is
ET with respect to F. When emphasis is placed on
the initial element x
0
and the final element x
n
, this se-
quence is also referred to as an ET sequence from x
0
to x
n
.
KEOD 2016 - 8th International Conference on Knowledge Engineering and Ontology Development
58

4.2 Target Mappings
We introduce the concept of target mapping, which is
useful to devise equivalent transformation (ET) rules
in the ECLS
F
space (Theorem 9) or to construct an
answer mapping (Theorem 8) for determining an an-
swer from the final state of computation.
The answer to a MI problem hCs,ϕi is determined
uniquely by Models(Cs) and ϕ. MI problems can thus
be transformed into simpler forms by ET preserving
the mapping Models.
Simplification of MI problems using ET preserv-
ing the mapping Models can be extended by consider-
ing additional partial mappings. A new classof partial
mappings, called GSETMAP, will be defined below.
Definition 1. GSETMAP is the set of all partial map-
pings from pow(ECLS
F
) to pow(pow(G
u
)).
As defined in Section 2.5, Models(Cs) is the set
of all models of Cs for any Cs ⊆ ECLS
F
. Since a
model is a subset of G
u
, Models is regarded as a total
mapping from pow(ECLS
F
) to pow(pow(G
u
)). Since
a total mapping is also a partial mapping, the map-
ping Models is a partial mapping from pow(ECLS
F
)
to pow(pow(G
u
)), i.e., it is an element of GSETMAP.
A partial mapping M in GSETMAP is of par-
ticular interest if
T
M(Cs) =
T
Models(Cs) for any
Cs ∈ dom(M). Such a partial mapping is called a tar-
get mapping.
Definition 2. A partial mapping M ∈ GSETMAP is a
target mapping iff for any Cs ∈ dom(M),
T
M(Cs) =
T
Models(Cs).
It is obvious that:
Theorem 6. The mapping Models is a target map-
ping.
The next theorem provides a sufficient condition
for a mapping in GSETMAP to be a target mapping.
Theorem 7. Let M ∈ GSETMAP. M is a target map-
ping if the following conditions are satisfied:
1. M(Cs) ⊆ Models(Cs) for any Cs ∈ dom(M).
2. For any Cs ∈ dom(M) and any m
2
∈ Models(Cs),
there exists m
1
∈ M(Cs) such that m
1
⊆ m
2
.
Proof: Assume that Conditions 1 and 2 above
are satisfied. Let Cs ∈ dom(M). By Condition 1,
T
M(Cs) ⊇
T
Models(Cs). We show that
T
M(Cs) ⊆
T
Models(Cs) as follows: Assume that g ∈
T
M(Cs).
Let m
2
∈ Models(Cs). By Condition 2, there exists
m
1
∈ M(Cs) such that m
1
⊆ m
2
. Since g ∈
T
M(Cs),
g belongs to m
1
. So g ∈ m
2
. Since m
2
is any arbitrary
element of Models(Cs), g belongs to
T
Models(Cs).
It follows that
T
M(Cs) =
T
Models(Cs). Hence M is
a target mapping.
4.3 Answer Mappings
A set of problems that can be solved at low cost is
useful to provide a desirable final destination for ET
computation. It can also be specified as a partial map-
ping that is preserved by ET transformation. Such a
specification is useful to invent and to justify new ET
transformation. This motivates the concept of answer
mapping, which is formalized below.
Definition 3. Let W be a set. A partial mapping A
from
pow(ECLS
F
) × Map(pow(G
u
),W)
to W is an answer mapping iff for any hCs, ϕi ∈
dom(A), ans
MI
(Cs,ϕ) = A(Cs,ϕ).
If M is a target mapping, then M can be used for
constructing answer mappings.
Theorem 8. Let M be a target mapping. Suppose that
A is a partial mapping such that
• dom(M) = {x | hx,yi ∈ dom(A)}, and
• for any hCs,ϕi ∈ dom(A),
A(Cs,ϕ) = ϕ(
\
M(Cs)).
Then A is an answer mapping.
Proof: Let hCs, ϕi ∈ dom(A). Since dom(M) =
{x | hx,yi ∈ dom(A)}, Cs belongs to dom(M). Since
M is a target mapping,
T
M(Cs) =
T
Models(Cs). So
ans
MI
(Cs,ϕ) = ϕ(
T
Models(Cs))
= ϕ(
T
M(Cs))
= A(Cs,ϕ).
Thus A is an answer mapping.
4.4 ET Steps and ET Rules
A schema for solving MI problems based on equiva-
lent transformation (ET) preserving answers is formu-
lated. The notions of preservation of answers/target
mappings, ET with respect to answers/target map-
pings, and an ET sequence are obtained by special-
izing the general definitions in Section 4.1.
Let STATE be the set of all MI problems. Elements
of STATE are called states.
Definition 4. Let hS,S
′
i ∈ STATE × STATE. hS, S
′
i is
an ET step iff if S = hCs,ϕi and S
′
= hCs
′
,ϕ
′
i, then
ans
MI
(Cs,ϕ) = ans
MI
(Cs
′
,ϕ
′
).
Model-Intersection Problems with Existentially Quantified Function Variables: Formalization and a Solution Schema
59
Definition 5. A sequence [S
0
,S
1
,...,S
n
] of ele-
ments of STATE is an ET sequence iff for any i ∈
{0,1, . . . , n − 1}, hS
i
,S
i+1
i is an ET step.
The role of ET computation constructing [S
0
,S
1
,
...,S
n
] is to start with S
0
and to reach S
n
from which
the answer to the given problem can be easily com-
puted.
The concept of ET rule on STATE is defined by:
Definition 6. An ET rule r on STATE is a partial
mapping from STATE to STATE such that for any
S ∈ dom(r), hS,r(S)i is an ET step.
We also define ET rules on pow(ECLS
F
) as fol-
lows:
Definition 7. An ET rule r with respect to a target
mapping M is a partial mapping from pow(ECLS
F
) to
pow(ECLS
F
) such that for any Cs∈ dom(r), M(Cs) =
M(r(Cs)).
We can construct an ET rule on STATE from an
ET rule with respect to a target mapping.
Theorem 9. Assume that M is a target mapping and
r is an ET rule with respect to M. Suppose that ¯r is a
partial mapping from STATE to STATE such that
• dom(r) = {x | hx, yi ∈ dom(¯r)}, and
• ¯r(S) = hr(Cs),ϕi if S = hCs,ϕi ∈ dom(¯r).
Then ¯r is an ET rule on STATE.
Proof: Assume that S ∈ dom(¯r). Then there exist
a clause set Cs and an exit mapping ϕ such that S =
hCs,ϕi and Cs ∈ dom(r). For such Cs and ϕ,
ans
MI
(Cs,ϕ) = ϕ(
T
Models(Cs))
= (since M is a target mapping)
= ϕ(
T
M(Cs))
= (since M(Cs) = M(r(Cs)))
= ϕ(
T
M(r(Cs)))
= (since M is a target mapping)
= ϕ(
T
Models(r(Cs)))
= ans
MI
(r(Cs), ϕ).
Since S = hCs,ϕi and ¯r(S) = hr(Cs),ϕi, hS, ¯r(S)i is
an ET step. Hence ¯r is an ET rule on STATE.
4.5 Correct Solutions based on ET
Rules
Given a set Cs of extended clauses and an exit map-
ping ϕ, the MI problem hCs,ϕi can be solved as fol-
lows:
1. Let A be an answer mapping.
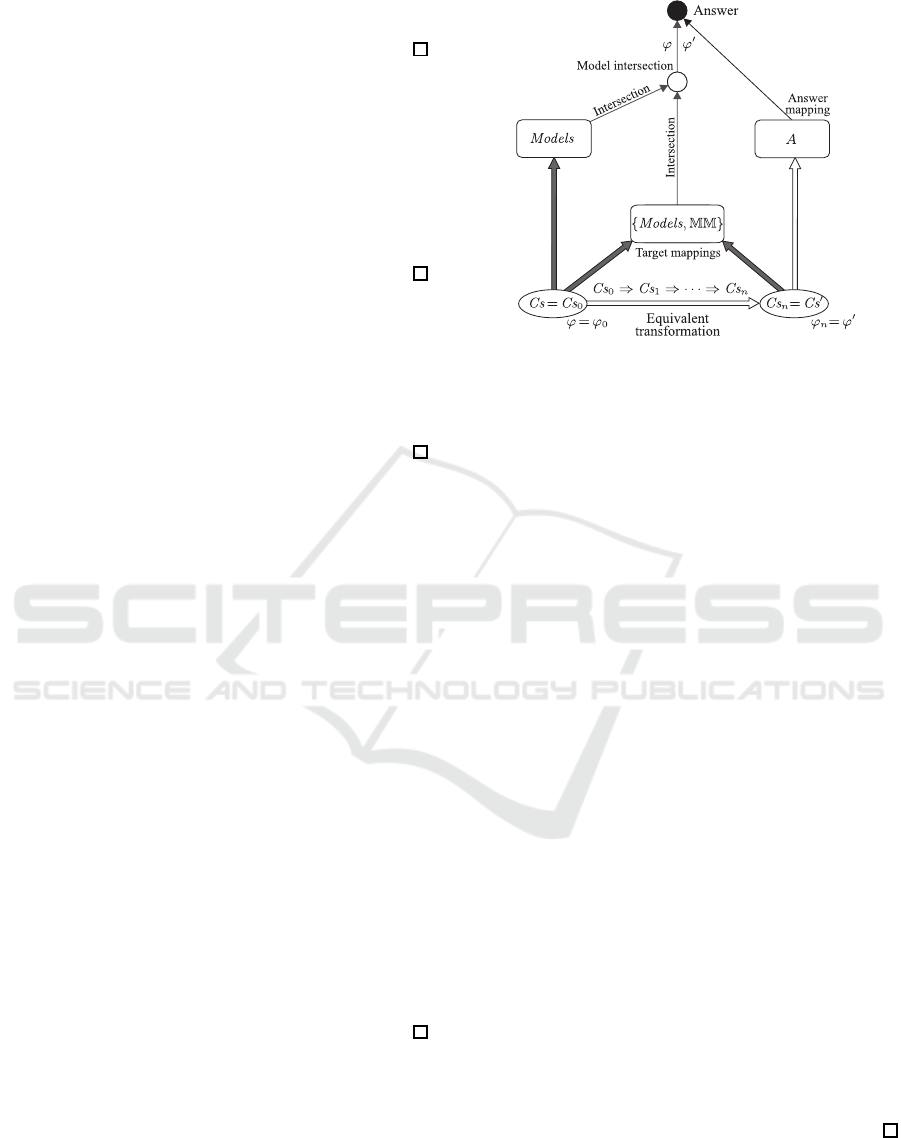
Figure 2: Target mappings and answer mappings yield
many correct computation paths.
2. Prepare a set R of ET rules on STATE.
3. Take S
0
such that S
0
= hCs,ϕi to start computa-
tion from S
0
.
4. Construct an ET sequence [S
0
,...,S
n
] by applying
ET rules in R, i.e., for each i ∈ {0,1, . . .,n − 1},
S
i+1
is obtained from S
i
by selecting and applying
r
i
∈ R such that S
i
∈ dom(r
i
) and r
i
(S
i
) = S
i+1
.
5. Assume that S
n
= hCs
n
,ϕ
n
i. If the computation
reaches the domain of A, i.e., hCs
n
,ϕ
n
i ∈ dom(A),
then compute the answer by using the answer
mapping A, i.e., output A(Cs
n
,ϕ
n
).
The answer to the MI problem hCs,ϕi, i.e.,
ans
MI
(Cs,ϕ) = ϕ(
T
Models(Cs)), can be directly ob-
tained by the computation shown in the leftmost path
in Fig. 2. Instead of taking this computation path, the
above solution takes a different one, i.e., the lowest
path (from Cs to Cs
′
) followed by the rightmost path
(through A) in Fig. 2.
The selection of r
i
in R at Step 4 is nondeterminis-
tic and there may be many possible computation paths
for each MI problem. Every output computed by us-
ing any arbitrary computation path is correct.
Theorem 10. When an ET sequence starting from
S
0
= hCs,ϕi reaches S
n
in dom(A), the above proce-
dure gives the correct answer to hCs,ϕi.
Proof: Since [S
0
,...,S
n
] is an ET sequence,
ans
MI
(Cs,ϕ) = ans
MI
(Cs
n
,ϕ
n
). Since A is an an-
swer mapping, ans
MI
(Cs
n
,ϕ
n
) = A(Cs
n
,ϕ
n
). Hence
ans
MI
(Cs,ϕ) = A(Cs
n
,ϕ
n
).
KEOD 2016 - 8th International Conference on Knowledge Engineering and Ontology Development
60

C
1
: FM(x) ← FP(x) C
2
: FP(john) ←
C
3
: FP(mary) ← C
4
: teach(john,ai) ←
C
5
: St(paul) ← C
6
: AC(ai) ←
C
7
: Tp(kr) ← C
8
: Tp(lp) ←
C
9
: curr(x,z) ← exam(x,y), subject(y,z),St(x),
Co(y),Tp(z)
C
10
: mdt(x,y) ← curr(x,z),expert(y,z), St(x),Tp(z),
FP(y),AC(w),teach(y,w)
C
11
: mdt(x,y) ← St(x),NFP(y)
C
12
: exam(paul,ai) ← C
13
: subject(ai,kr) ←
C
14
: subject(ai,lp) ← C
15
: expert(john,kr) ←
C
16
: expert(mary,lp) ←
C
17
: AC(x) ← teach(mary,x)
C
18
: ← AC(x),BC(x)
C
19
: AC(x),BC(x) ← Co(x)
C
20
: Co(x) ← AC(x)
C
21
: Co(x) ← BC(x)
C
22
: FP(x) ← NFP(x)
C
23
: ← NFP(x),teach(x,y),Co(y)
C
24
: teach(x,y), NFP(x) ← FP(x),func( f
0
,x,y)
C
25
: Co(y),NFP(x) ← FP(x), func( f
0
,x,y)
Figure 3: Background knowledge for the mdt problem on
ECLS
F
.
5 EXAMPLE
5.1 Problem Description
The clauses in Fig. 3 are obtained from the “may-
do-thesis” problem (for short, the mdt problem) given
in (Donini et al., 1998) with some modification. All
atoms appearing in Fig. 3 belong to A
u
. The unary
predicates NFP, FP, FM, Co, AC, BC, St, and Tp
denote “non-teaching full professor,” “full profes-
sor,” “faculty member,” “course,” “advanced course,”
“basic course,” “student,” and “topic,” respectively.
The clauses C
9
–C
11
together provide the conditions
for a student to do his/her thesis with a professor,
where mdt(s, p), curr(s,t), expert(p,t), exam(s,c),
and subject(c,t) are intended to mean “s may do
his/her thesis with p,” “s studied t in his/her curricu-
lum,” “p is an expert in t,” “s passed the exam of c,”
and “c covers t,” respectively, for any student s, any
professor p, any topic t, and any course c.
Suppose that we want to find all professors with
whom paul may do his thesis. This problem is formu-
lated as a MI problem hCs,ϕi, where Cs consists of
the clauses C
1
–C
25
in Fig. 3 and ϕ is defined by: for
any G ⊆ G
u
,
ϕ(G) = {x | mdt(paul,x) ∈ G}.
C
26
: teach(john,ai) ←
C
27
: AC(ai) ←
C
28
: AC(x) ← teach(mary,x)
C
29
: ← AC(x),BC(x)
C
30
: AC(x),BC(x) ← Co(x)
C
31
: Co(x) ← AC(x)
C
32
: Co(x) ← BC(x)
C
33
: ← NFP(x),teach(x,y),Co(y)
C
34
: mdt(paul,mary) ← AC(x), teach(mary, x),
Co(ai)
C
35
: mdt(paul,john) ← AC(x),teach(john,x),
Co(ai)
C
36
: mdt(paul,x) ← NFP(x)
C
37
: teach(mary,x), NFP(mary) ← func( f
0
,mary,x)
C
38
: teach(john,x), NFP(john) ← func( f
0
,john,x)
C
39
: Co(x),NFP(mary) ← func( f
0
,mary,x)
C
40
: Co(x),NFP(john) ← func( f
0
,john,x)
Figure 4: Clauses obtained by application of ET rules.
How to compute the answer to this MI problem using
many kinds of clause transformation rules is demon-
strated in Section 5.2.
5.2 ET Computation
The clause set Cs consisting of C
1
–C
25
given in Sec-
tion 5.1 (Fig. 3) is transformed as follows:
• By (i) unfolding using the definitions of the pred-
icates FP, Tp, curr, subject, expert, St, and exam,
(ii) removing these definitions along with the def-
inition of FM using definite-clause removal, (iii)
removal of valid clauses, and (iv) removal of
subsumed clauses, the clauses C
1
–C
25
are trans-
formed into the clauses C
26
–C
40
in Fig. 4.
• Side-change transformation for NFP enables (i)
unfolding using the definition of Co, (ii) elimi-
nation of this definition using definite-clause re-
moval, and (iii) removal of valid clauses. By such
side-change transformation followed by transfor-
mation of these three types, C
26
–C
40
are trans-
formed into the clauses C
41
–C
61
in Fig. 5.
• Side-change transformation for BC enables un-
folding using the definition of AC. By (i) un-
folding, (ii) definite-clause removal, (iii) removal
of duplicate atoms, (iv) removal of valid clauses,
and (v) removal of subsumed clauses, C
41
–C
61
are
transformed into C
62
–C
77
in Fig. 6.
• By (i) unfolding using the definition of teach, (ii)
definite-clause removal, (iii) removal of duplicate
atoms, (iv) removal of valid clauses, and (v) re-
moval of subsumed clauses, C
62
–C
77
are trans-
formed into C
78
–C
83
in Fig. 7.
Model-Intersection Problems with Existentially Quantified Function Variables: Formalization and a Solution Schema
61

C
41
: teach(john,ai) ←
C
42
: AC(ai) ←
C
43
: AC(x) ← teach(mary,x)
C
44
: ← AC(x),BC(x)
C
45
: mdt(paul,mary) ← AC(x),teach(mary,x),
func( f
0
,mary,ai),
notNFP(mary)
C
46
: mdt(paul,mary) ← AC(x),teach(mary,x),
func( f
0
,john,ai),
notNFP(john)
C
47
: mdt(paul,mary) ← AC(x),teach(mary, x),BC(ai)
C
48
: mdt(paul,mary) ← AC(x),teach(mary, x),AC(ai)
C
49
: mdt(paul,john) ← AC(x),teach(john,x),
func( f
0
,mary,ai),
notNFP(mary)
C
50
: mdt(paul,john) ← AC(x),teach(john,x),
func( f
0
,john,ai),
notNFP(john)
C
51
: mdt(paul,john) ← AC(x),teach(john, x),BC(ai)
C
52
: mdt(paul,john) ← AC(x),teach(john, x),AC(ai)
C
53
: mdt(paul,x),notNFP(x) ←
C
54
: teach(mary,x) ← func( f
0
,mary, x),
notNFP(mary)
C
55
: teach(john,x) ← func( f
0
,john,x),
notNFP(john)
C
56
: notNFP(x) ← teach(x,y),func( f
0
,mary,y),
notNFP(mary)
C
57
: notNFP(x) ← teach(x,y),func( f
0
,john,y),
notNFP(john)
C
58
: notNFP(x) ← teach(x,y),BC(y)
C
59
: notNFP(x) ← teach(x,y),AC(y)
C
60
: AC(x),BC(x) ← func( f
0
,mary, x),
notNFP(mary)
C
61
: AC(x),BC(x) ← func( f
0
,john,x),
notNFP(john)
Figure 5: Clauses obtained by application of ET rules.
• By definite-clause removal for notBC, C
78
–C
83
are transformed into C
84
–C
87
in Fig. 8.
• Application of the resolution rule to C
84
and C
86
,
followed by removal of independent func-atoms
and removal of duplicated atoms, yields the clause
C
88
in Fig. 9. By removal of subsumed clauses,
C
84
and C
86
are removed. By definite clause re-
moval, C
87
is removed. Then C
84
–C
87
are trans-
formed into C
88
–C
89
in Fig. 9.
As a result, the MI problem hCs,ϕi in Sec-
tion 5.1 is transformed equivalently into the MI prob-
lem h{C
88
,C
89
},ϕi. Hence
ans
MI
(Cs,ϕ)
= ans
MI
({C
88
,C
89
},ϕ)
= ϕ(
T
Models({C
88
,C
89
}))
= ϕ({mdt(paul,mary),mdt(paul,john)})
= {mary,john}.
C
62
: teach(john,ai) ←
C
63
: notBC(ai) ←
C
64
: notBC(x) ← teach(mary,x)
C
65
: notNFP(x),notBC(y) ← teach(x,y)
C
66
: notNFP(x) ← teach(x,y),func( f
0
,john,y),
notNFP(john)
C
67
: notNFP(x) ← teach(x,y),func( f
0
,mary,y),
notNFP(mary)
C
68
: mdt(paul,mary) ← teach(mary,x)
C
69
: mdt(paul,john) ← teach(john,x),
teach(mary,x)
C
70
: mdt(paul,john) ← teach(john,ai)
C
71
: mdt(paul,john) ← teach(john,x),
func( f
0
,mary,x),
notNFP(mary), notBC(x)
C
72
: mdt(paul,john) ← teach(john,x),
func( f
0
,john,x),
notNFP(john),notBC(x)
C
73
: mdt(paul,x),notNFP(x) ←
C
74
: teach(mary,x) ← func( f
0
,mary,x),
notNFP(mary)
C
75
: teach(john,x) ← func( f
0
,john,x),
notNFP(john)
C
76
: notNFP(x) ← teach(x,ai)
C
77
: notNFP(x) ← teach(x,y),teach(mary,y)
Figure 6: Clauses obtained by application of ET rules.
C
78
: notBC(x) ← func( f
0
,mary,x),notNFP(mary)
C
79
: mdt(paul,x),notNFP(x) ←
C
80
: notBC(ai) ←
C
81
: mdt(paul,john) ←
C
82
: mdt(paul,mary) ← func( f
0
,mary,x),
notNFP(mary)
C
83
: notNFP(john) ←
Figure 7: Clauses obtained by application of ET rules.
C
84
: mdt(paul,x),notNFP(x) ←
C
85
: mdt(paul,john) ←
C
86
: mdt(paul,mary) ← func( f
0
,mary, x),
notNFP(mary)
C
87
: notNFP(john) ←
Figure 8: Clauses obtained by application of ET rules.
C
88
: mdt(paul,mary) ←
C
89
: mdt(paul,john) ←
Figure 9: Clauses obtained by application of ET rules.
6 CONCLUSIONS
We have defined a class of model-intersection (MI)
problems on extended clauses possibly with con-
straint atoms and func-atoms, each of which is a pair
of a set Cs of extended clauses and an exit mapping
KEOD 2016 - 8th International Conference on Knowledge Engineering and Ontology Development
62

used for constructing the output answer from the in-
tersection of all models of Cs. Many logical prob-
lems, including proof problems and query-answering
(QA) problems, can be transformed into MI problems
preserving their answers. The theory in this paper
therefore providesa foundation for many kinds of log-
ical problem solving.
We introduced the concepts of target mapping and
answer mapping, which are useful for inventing many
kinds of ET rules for solving MI problems on ex-
tended clauses. The proposed solution schema for MI
problems comprises the following steps: (i) formal-
ize a given problem as a MI problem or map it into a
MI problem, (ii) prepare ET rules from answers/target
mappings, (iii) construct an ET sequence preserving
answers/target mappings, and (iv) compute the an-
swer by using some answer mapping (possibly con-
structed on some target mapping).
Many logical problems, among others, all proof
problems and all QA problems on FOL
c
, are mapped,
by using new meaning-preserving Skolemization
(Akama and Nantajeewarawat, 2011), into MI prob-
lems with function variables, and solved by ET com-
putation proposed in this paper. When only con-
ventional clauses without function variables are used,
meaning-preserving Skolemization is impossible. In
the presence of built-in constraint atoms, the classical
theory, which uses the conventional Skolemization,
cannot guarantee the correctness of the conversion of
logical formulas into clauses.
The ET-based solution method together with
meaning-preserving Skolemization is very general
and fundamental, since any combination of ET steps
forms correct computation and the correctness of the
method for a very large class of problems has been
shown in this paper. By its generality, the theory de-
veloped in this paper makes clear a fundamental and
central structure of representation and computation
for logical problem solving.
ACKNOWLEDGEMENTS
This research was partially supported by JSPS KAK-
ENHI Grant Numbers 25280078 and 26540110.
REFERENCES
Akama, K. and Nantajeewarawat, E. (2008). Meaning-
Preserving Skolemization on Logical Structures. In
Proceedings of the 9th International Conference
on Intelligent Technologies, pages 123–132, Samui,
Thailand.
Akama, K. and Nantajeewarawat, E. (2011). Meaning-
Preserving Skolemization. In Proceedings of the 3rd
International Conference on Knowledge Engineering
and Ontology Development, pages 322–327, Paris,
France.
Akama, K. and Nantajeewarawat, E. (2015a). A General
Schema for Solving Model-Intersection Problemson a
Specialization System by Equivalent Transformation.
In Proceedings of the 7th International Joint Confer-
ence on Knowledge Discovery, Knowledge Engineer-
ing and Knowledge Management (IC3K 2015), Vol-
ume 2: KEOD, pages 38–49, Lisbon, Portugal.
Akama, K. and Nantajeewarawat, E. (2015b). Function-
variable Elimination and Its Limitations. In Pro-
ceedings of the 7th International Joint Conference
on Knowledge Discovery, Knowledge Engineering
and Knowledge Management (IC3K 2015), Volume 2:
KEOD, pages 212–222, Lisbon, Portugal.
Baader, F., Calvanese, D., McGuinness, D. L., Nardi, D.,
and Patel-Schneider, P. F., editors (2007). The De-
scription Logic Handbook. Cambridge University
Press, second edition.
Chang, C.-L. and Lee, R. C.-T. (1973). Symbolic Logic and
Mechanical Theorem Proving. Academic Press.
Clark, K. L. (1978). Negation as Failure. In Gallaire, H.
and Minker, J., editors, Logic and Data Bases, pages
293–322. Plenum Press, New York.
Donini, F. M., Lenzerini, M., Nardi, D., and Schaerf, A.
(1998). AL-log: Integrating Datalog and Description
Logics. Journal of Intelligent Information Systems,
16:227–252.
Fitting, M. (1996). First-Order Logic and Automated The-
orem Proving. Springer-Verlag, second edition.
Gelfond, M. and Lifschitz, V. (1988). The Stable Model
Semantics for Logic Programming. In Proceedings
of International Logic Programming Conference and
Symposium, pages 1070–1080. MIT Press.
Gelfond, M. and Lifschitz, V. (1991). Classical Negation
in Logic Programs and Disjunctive Databases. New
Generation Computing, 9:365–386.
Lloyd, J. W. (1987). Foundations of Logic Programming.
Springer-Verlag, second, extended edition.
Motik, B., Sattler, U., and Studer, R. (2005). Query An-
swering for OWL-DL with Rules. Journal of Web Se-
mantics, 3(1):41–60.
Robinson, J. A. (1965). A Machine-Oriented Logic Based
on the Resolution Principle. Journal of the ACM,
12:23–41.
Tessaris, S. (2001). Questions and Answers: Reasoning and
Querying in Description Logic. PhD thesis, Depart-
ment of Computer Science, The University of Manch-
ester, UK.
Model-Intersection Problems with Existentially Quantified Function Variables: Formalization and a Solution Schema
63
