
Scheduling Different Types of Applications in a SaaS Cloud
Georgios L. Stavrinides and Helen D. Karatza
Department of Informatics, Aristotle University of Thessaloniki, 54124 Thessaloniki, Greece
{gstavrin, karatza}@csd.auth.gr
Keywords: Scheduling, Complex Workload, SaaS Cloud, Performance, Modeling, Simulation.
Abstract: As Software as a Service (SaaS) cloud computing gains momentum, the efficient scheduling of different
types of applications in such platforms is of great importance, in order to achieve good performance. In
SaaS clouds the workload is usually complex and comprises applications with various degrees of
parallelism and priority. Therefore, one of the major challenges is to cope with the case where high-priority
real-time single-task applications arrive and have to interrupt other non-real-time parallel applications in
order to meet their deadlines. In this case, it is required to effectively deal with the real-time applications, at
the smallest resulting degradation of parallel performance. In this paper, we investigate by simulation the
performance of strategies for the scheduling of complex workloads in a SaaS cloud. The examined
workload consists of non-real-time applications featuring fine-grained parallelism (gangs) and periodic
high-priority soft real-time single-task applications that can tolerate deadline misses by bounded amounts.
We examine the impact of gang service time variability on the performance of the scheduling algorithms, by
considering service demands that follow a hyper-exponential distribution. The simulation results reveal that
the relative performance of the employed scheduling strategies depends on the type of the workload.
1 INTRODUCTION
Software as a Service (SaaS) cloud computing has
become prevalent in recent years, replacing the
traditional software delivery model, which required
the installation of the software on the client’s
servers. According to this emerging software
distribution approach, which may be considered as
the evolution of the Service-Oriented Architecture
(SOA) model, the software is hosted by the vendor
and made available to the end-users over the
Internet, as a cloud service (Cusumano, 2010) and
(Beloglazov et al., 2012).
Some of the main benefits of the SaaS cloud
computing model are:
The software is always up to date.
The software can be accessed via various devices
and from different locations.
It provides overall easier administration and
maintenance, as the SaaS clients do not have to
acquire, maintain and monitor expensive
hardware and software infrastructure.
The clients use the software services, without any
control on the host environment, either on a pay-as-
you-go basis or a subscription based pricing model
(Bittencourt et al., 2012) and (Dillon et al., 2010).
1.1 Motivation
SaaS cloud computing usually relies on a multi-
tenant model, where applications of different users
run on the same virtual machines (VMs). Due to the
tremendous increase of users and the number of
different applications sharing the underlying
virtualized resources, the performance of SaaS clouds
has become a crucial area of research. Therefore, the
efficient scheduling of different types of applications
in such platforms is of great importance, in order to
effectively utilize the underlying multi-tenant
infrastructure and achieve good performance, while
maintaining a certain level of Quality of Service
(QoS) (Hofer and Karagiannis, 2011), (Rimal et al.,
2009) and (Stavrinides and Karatza, 2015).
In SaaS clouds the workload is usually complex
and comprises applications with various degrees of
parallelism and priority. Consequently, one of the
major challenges is to cope with the case where
high-priority real-time single-task applications arrive
and have to interrupt other non-real-time parallel
applications in order to meet their deadlines. In this
case, it is required to effectively deal with the real-
time applications, at the smallest resulting
degradation of parallel performance. Moreover, part
of the workload may consist of fine-grained parallel
144
Stavrinides G. and Karatza E.
Scheduling Different Types of Applications in a SaaS Cloud.
DOI: 10.5220/0006223101440151
In Proceedings of the Sixth International Symposium on Business Modeling and Software Design (BMSD 2016), pages 144-151
ISBN: 978-989-758-190-8
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

applications that present high variability in their
service times. In this case, the scheduling algorithm
should cope with bursts of very small service times
and a few but very large ones, compared to the
average service time of applications.
1.2 Contribution
In this paper, we focus on the performance of
strategies for the scheduling of complex workloads
in a SaaS cloud with multi-tenant VMs. The
examined workload consists of non-real-time
applications featuring fine-grained parallelism and
periodic high-priority soft real-time single-task
applications that can tolerate deadline misses by
bounded amounts.
We examine the impact of service time
variability of parallel applications on the
performance of the scheduling algorithms, by
considering service demands that follow a hyper-
exponential distribution. To our knowledge,
scheduling complex workloads, including fine-
grained parallel applications and periodic soft real-
time single-task jobs, in such a framework, does not
appear elsewhere in the research literature.
1.3 Background and Related Work
One type of workload submitted to SaaS clouds is
bag-of-tasks (BoT) applications. Each BoT is a
collection of independent tasks that do not
communicate with each other and can run in any
order (Karatza, 2004), (Kim et al., 2007), (Moschakis
and Karatza, 2015), (Papazachos and Karatza, 2015)
and (Terzopoulos and Karatza, 2016). Another type
of workload is applications that consist of
interdependent tasks, which often have precedence
constraints among them and thus form a directed
acyclic graph (DAG) (Stavrinides and Karatza,
2010), (Stavrinides and Karatza, 2011), (Stavrinides
and Karatza, 2012) and (Stavrinides and Karatza,
2014).
However, most often the workload in SaaS clouds
consists of fine-grained parallel applications. They
consist of frequently communicating tasks, which are
scheduled to run simultaneously on different VMs, as
gangs. Gang scheduling is an efficient resource
management technique in the case where parallel
applications feature fine-grained parallelism.
Since with gang scheduling a gang’s task can
start execution only if all of the other sibling tasks
can also start processing, some VMs may remain
idle even when there are tasks waiting in their
queues. This problem becomes more complex when
the workload also includes real-time applications
which have higher priority than gangs.
Gang scheduling algorithms have been proposed
and studied by many authors, each differing in the
way resources are shared among the jobs
(Stavrinides and Karatza, 2008), (Stavrinides and
Karatza, 2009), (Streit, 2005) and (Zhang et al.,
2003).
In (Karatza, 2006), the performance of two well-
known gang scheduling methods is studied, the
Adapted-First-Come-First-Served (AFCFS) and the
Largest-Job-First-Served (LJFS). It has been shown
that in many cases LJFS performs better than
AFCFS. However, in this case no real-time jobs are
considered and the overall performance is expressed
by the average response time of gangs.
In this paper, we study gang scheduling in a
queueing network model of a SaaS cloud. The
performance of two policies that are variations of
AFCFS and LJFS, is studied under various work-
loads, which include gangs, as well as periodic real-
time single-task jobs that have higher priority than
gangs. The periodic single-task jobs are considered
as soft-real time applications, in the sense that they
can tolerate deadline misses by bounded amounts.
Related research includes (Karatza, 2007) and
(Karatza, 2008). These papers examine critical
sporadic jobs that need to start execution upon
arrival and therefore they interrupt gangs. In this
paper, we examine periodic soft real-time jobs that
can tolerate some delay called slack time. This
happens in the case when gangs in service require
only a small amount of time to finish their execution
that is less than or equal to the slack time.
Scheduling workloads consisting of soft-real
time jobs and gangs in distributed systems has also
been studied in (Karatza, 2014). However, the
workload considered in this case does not include
parallel applications with highly variable service
demands.
Tardiness bounds for sporadic real-time task
systems have been studied in (Devi and Anderson,
2006) and (Leontyev and Anderson, 2010).
However, these papers do not consider gangs in their
workloads.
In this paper, we examine the impact of gang
service time variability on the performance of the
scheduling algorithms, by considering service
demands that follow a hyper-exponential
distribution. A high variability in task service
demand implies that there is a proportionately large
number of service demands that are very small
compared to the mean service time and a
comparatively small number of service demands that
Scheduling Different Types of Applications in a SaaS Cloud
145
are very large.
When a gang with a long service demand starts
execution, it occupies its assigned VMs for a long
time interval, and depending on the scheduling
policy that is employed, it may introduce inordinate
queueing delays for other tasks waiting for service.
The performance evaluation of complex
distributed systems such as clouds is often possible
only by simulation rather than by analytical
techniques, due to the complexity of the systems.
Simulation can provide important insights into the
efficiency and tradeoffs of scheduling in such
environments. Therefore, due to the complexity of
the system under study, we use discrete event
simulation to evaluate the performance of the
scheduling algorithms.
The remainder of this paper is organized as
follows: Section 2 introduces the model and the
methodology employed, describing the system and
workload models. Sections 3 and 4 describe the
routing and gang scheduling policies respectively,
whereas Section 5 presents the performance metrics.
The model implementation and its input parameters,
as well as the simulation results, are presented and
analysed in Section 6. Finally, Section 7 summarizes
the paper and provides future research directions.
2 MODEL AND METHODOLOGY
2.1 System and Workload Models
This paper uses a simulation model to address
performance issues. The target SaaS cloud is
considered to consist of a set V of p virtual machines
V = {VM
1
, VM
2
, …, VM
p
}, that are fully connected
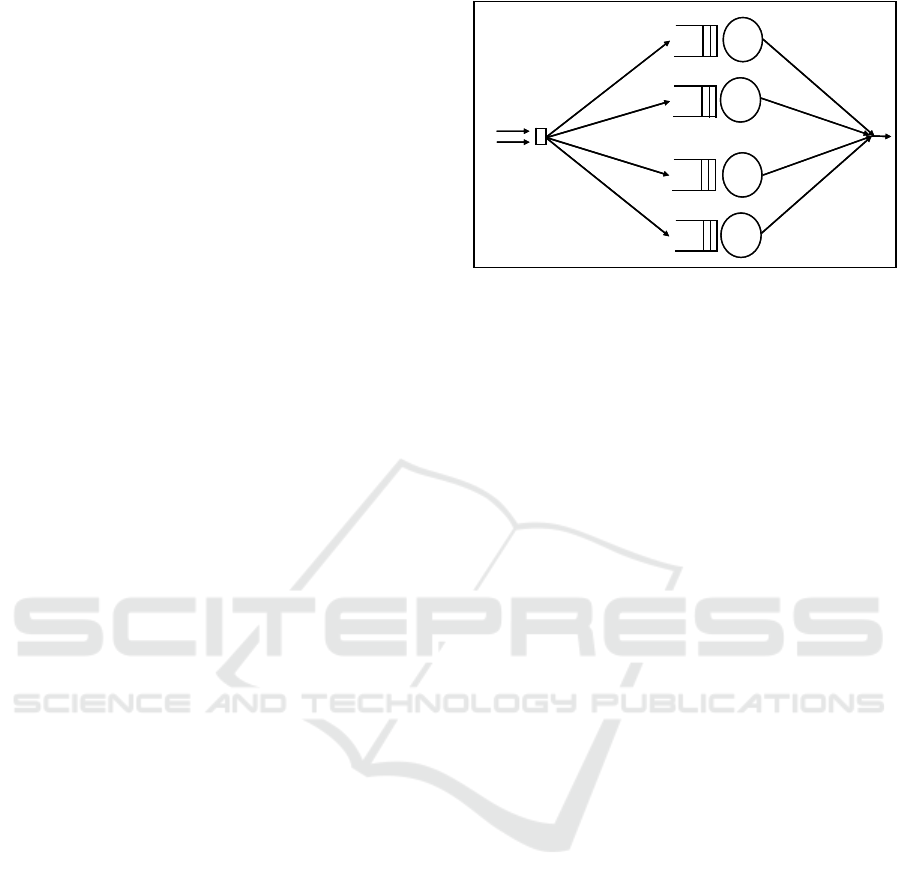
by a virtual network (Figure 1).
It is assumed that the communication between the
virtual machines is contention-free. Each virtual
machine VM
i
serves its own queue of tasks and has
mean execution rate μ. The VMs in the cloud are
multi-tenant, that is each VM processes tasks of
applications submitted by different users.
Each parallel job is submitted for execution in the
cloud by a user. Users share the virtual machines to
run concurrently their applications. Since the parallel
applications are submitted dynamically by multiple
users, it is assumed that they arrive in the cloud in a
Poisson stream with mean arrival rate λ.
The number of tasks in a parallel job x is the
job’s degree of parallelism and it is represented as
t(x). In Figure 1 virtual machines are allocated to a
parallel job x, which has j parallel tasks. VM
p
is
assigned to a periodic single-task job.
λ
1
VM
1
.
.
.
.
.
.
.
.
λ
2
Periodic real-time
single-task jobs
Gang jobs
λ
1
VM
1
.
.
.
.
.
.
.
.
λ
2
Periodic real-time
single-task jobs
Gang jobs
task-1of Gang x
task-2 of Gang x
task-j of Gang x
Periodic job y
.
.
.
.
.
.
.
.
VM
2
VM
k
VM
p
Figure 1: The queueing network model.
If vm(x) represents the number of VMs required
by job x, then the following relationship holds: 1
t(x) = vm(x) p. We call size of job x the number of
its parallel tasks. A job is small (large) if it consists
of a small (large) number of tasks. Soft real-time
jobs are periodic single-task jobs.
Each task of a gang x is routed to a different VM.
Gang x starts to execute only if all of the vm(x) VMs
assigned to its tasks are available. Otherwise, all of
the x gang tasks wait in their assigned queues. When
a gang terminates execution, all VMs assigned to it
are released.
An important issue that arises is the need to serve
a real-time single-task job on a virtual machine
executing a gang task. Therefore, a mechanism is
needed to deal with the fact that resources allocated
to a gang are changing. The scheduler must give
priority to real-time applications, but at the same
time provide good performance for parallel
applications that compete for resources.
For each soft real-time application there is a
slack time during which it can wait for a gang that
needs a small amount of time to finish execution.
The slack time is a constant tardiness that is
independent of elapsed time. If the time until the
completion of a gang is larger than the slack time,
then the job scheduler interrupts the gang upon the
arrival of a soft real-time application, so that it can
occupy a VM. The remaining virtual machines that
are assigned to the interrupted gang can serve tasks
of other gangs that are waiting at their queues. All of
the work that was performed on all tasks associated
with the interrupted gang must be redone. The tasks
of an interrupted parallel application are rescheduled
for execution at the head of their assigned queues.
A technique used to evaluate the performance of
the scheduling disciplines, is experimentation using
a synthetic workload. The workload considered here
is characterized by the following parameters:
The distribution of the number of tasks of gangs.
Sixth International Symposium on Business Modeling and Software Design
146

The distribution of gang tasks service demand.
The distribution of soft real-time jobs service
demand.
The mean inter-arrival time of gangs.
The period of soft real- time jobs.
2.2 The Distribution of Gang Sizes
We assume that the number of gang tasks is
uniformly distributed in the range [1, p]. Therefore,
the mean number of tasks per parallel application is
equal to m = (1+p)/2.
2.3 Service Time Distribution
For the service demands of parallel applications and
real-time jobs we assume that:
Service demands of gang tasks follow a hyper-
exponential distribution with a coefficient of
variation CV and a mean 1/μ. CV determines the
degree of variability. This is the ratio of the
standard deviation of task execution time to its
mean. CV >1 implies a large variability,
compared to the variability of the exponential
distribution.
Real-time jobs service demands are
exponentially distributed with a mean of 1/μ.
2.4 Distribution of Job Inter-arrival
Times
We consider two arrival streams, one for gangs and
one for real-time jobs:
The inter-arrival times of gangs are exponential
random variables with a mean of 1/λ
1
.
The inter-arrival times of soft real-time jobs are
constant time intervals equal to 1/λ
2
(i.e. the real-
time jobs are periodic).
3 ROUTING POLICIES
Job routing in SaaS clouds is an important aspect for
good performance. In this paper, our workload
model consists of two different types of jobs.
Therefore, we examine two different routing
policies, one for each job type.
The first job type concerns the parallel
applications, which are gangs. Hence, in this case
routing occurs at the task level. The second job type
concerns the single task real-time applications.
Consequently, in this case routing occurs at the job
level.
3.1 Parallel Applications Routing
A variation of the join the shortest queue policy is
used. That is, the t(x) tasks of a gang x are assigned
to the shortest t(x) of the p queues, every task to a
different VM queue.
3.2 Real-time Applications Routing
The routing policy of real-time jobs is join the
shortest queue. In the experiments that we have
conducted for this research, appropriate values of the
period have been chosen, so that there are no further
real-time job arrivals in the case where all of the
VMs serve real-time jobs.
4 PARALLEL APPLICATIONS
SCHEDULING POLICIES
It is assumed that the scheduler knows the exact
number of VMs required by each gang. The
following two scheduling strategies are employed in
our simulations.
4.1 Adapted-First-Come-First-Served
with Execution Interruption based
on Slack Time (AFCFS-ST)
This strategy schedules a gang job whenever VMs
assigned to its tasks are available. When there are
not enough VMs available for a large job whose
tasks are waiting in the front of the queues, then the
AFCFS-ST policy schedules tasks of smaller jobs in
the queues. A problem with this scheduling policy is
that it tends to favor small gangs at the expense of
larger gangs and thus it may increase system
fragmentation. A gang job may be interrupted upon
arrival of a real-time single-task job.
4.2 Largest-Job-First-Served with
Execution Interruption based on
Slack Time (LJFS-ST)
With this strategy tasks that belong to larger gangs
are placed at the head of queues. All gang tasks in
queues are searched in order, and the first jobs
whose assigned VMs are available begin execution.
This scheduling method favors large, highly parallel
gangs at the expense of smaller gangs, but in many
cases this treatment of large gangs is acceptable. For
example, supercomputers are often used to
particularly run highly parallel jobs for fast
Scheduling Different Types of Applications in a SaaS Cloud
147

execution. However, LJFS-ST involves an overhead
because the VM queues need to be re-arranged each
time a new gang is added. Similarly to the AFCFS-
ST case, a gang job may be interrupted upon arrival
of a real-time job.
In both cases of AFCFS-ST and LJFS-ST, when
a real-time job terminates, the interrupted gang may
not resume execution immediately, as some of the
VMs assigned to its tasks may be running other jobs.
Those jobs will not terminate at the same time so the
interrupted gang will not use the assigned VMs
efficiently. It is worth noting that when a real-time
job is assigned to a virtual machine, it is not only the
gang tasks of the particular VM queue that are
delayed, but also gang tasks in other queues that
have a sibling task waiting in the particular queue.
5 PERFORMANCE METRICS
The response time rt
i
of a gang i is the time interval
from the dispatching of its tasks to different VM
queues, to the service completion of the gang − this
is the time spent in VM queues plus the time spent in
service.
The average response time RT of n gangs is
defined as:
n
rt
RT
n
i
i
1
(1)
Additionally, we weight each gang’s response time
with its size (Streit, 2005). Consequently, it is
avoided that gangs with the same execution time, but
with different number of tasks, have the same impact
on performance. The average weighted response
time WRT of n gangs is defined as:
n
i
n
i
ii
xvm
rtxvm
WRT
1
i
1
)(
)(
(2)
The parameters used in the simulation experiments
are shown in Table 1.
Table 1: System parameters and performance metrics.
ST Slack time of real-time jobs
p Number of VMs
m Average number of tasks per parallel job
μ Mean execution rate of a VM
1/μ Mean execution time of a VM
CV Coefficient of variation of service demands
λ
1
Mean arrival rate of gangs
1/λ
2
Period of real-time jobs
U Average VM utilization
RT Average response time of gangs
D
RT
Relative (%) decrease in RT when LJFS-ST method
is employed instead of the AFCFS-ST policy
WRT Average weighted response time of gangs
D
WRT
Relative (%) decrease in WRT when LJFS-ST
method is employed instead of the AFCFS-ST
policy
6 SIMULATION RESULTS AND
DISCUSSION
6.1 Model Implementation and Input
Parameters
The queueing network model described in Section 2
is implemented via discrete event simulation. Due to
the complexity of the system and the workload
model under study, we implemented our own
discrete event simulation program in C, tailored to
the requirements of the specific case study.
In order to derive the mean values of the
performance parameters we used the independent
replications method. For each set of workload
parameters we run 30 replications of the simulation
with different seeds of random numbers and for
32,000 served jobs in each replication. We
considered this simulation length long enough to
derive results, as we found by experimentation that
longer runs did not affect simulation output
significantly. The use of sufficiently
long simulation
runs, is one of the ways to reduce the effect of initial
bias on simulation results.
For every mean value of the performance
parameters, a 95% confidence interval was
evaluated. The half-widths of all confidence
intervals are less than 5% of their respective mean
values evaluated. For our experiments, we used the
simulation input parameters shown in Table 2.
In our workload model there are on average m =
(p+1)/2 = 8.5 tasks per parallel job. Therefore, if we
do not consider any real-time jobs and all VMs are
busy serving gangs, then an average of p / m =
1.88235 parallel jobs can be served per each unit of
time. This implies that we should choose a λ
1
such
that the condition λ
1
< 1.88235 holds, so that the VM
queues will not be saturated. However, due to the
real-time job arrivals, the number of VMs that are
Sixth International Symposium on Business Modeling and Software Design
148
available for gang service is [p – (λ
2
/μ)]. Therefore,
we have to choose a value of λ
1
for which the
following relationship holds:
λ
1
< [p – (λ
2
/μ)] / m (3)
However, due to gang scheduling, there are often
idle VMs, despite the fact that there are gang tasks
waiting in the respective queues. Therefore, the VM
queues get very easily saturated when the mean
inter-arrival time of gangs is close to [p – (λ
2
/μ)] / m.
After experimental runs with various values of 1/λ
1
,
we chose 0.78 as the smallest mean inter-arrival time
of gangs for the experiments, for all cases of 1/λ
2
.
The input parameter values which were used for the
experiments are presented in Table 2.
Table 2: Input parameters.
ST 0.1
1/μ 1
1/λ
1
0.84, 0.78
1/λ
2
20, 30, 40
CV 2
6.2 Performance Analysis
The simulation results that are presented next
describe the relative performance of the two gang
scheduling policies.
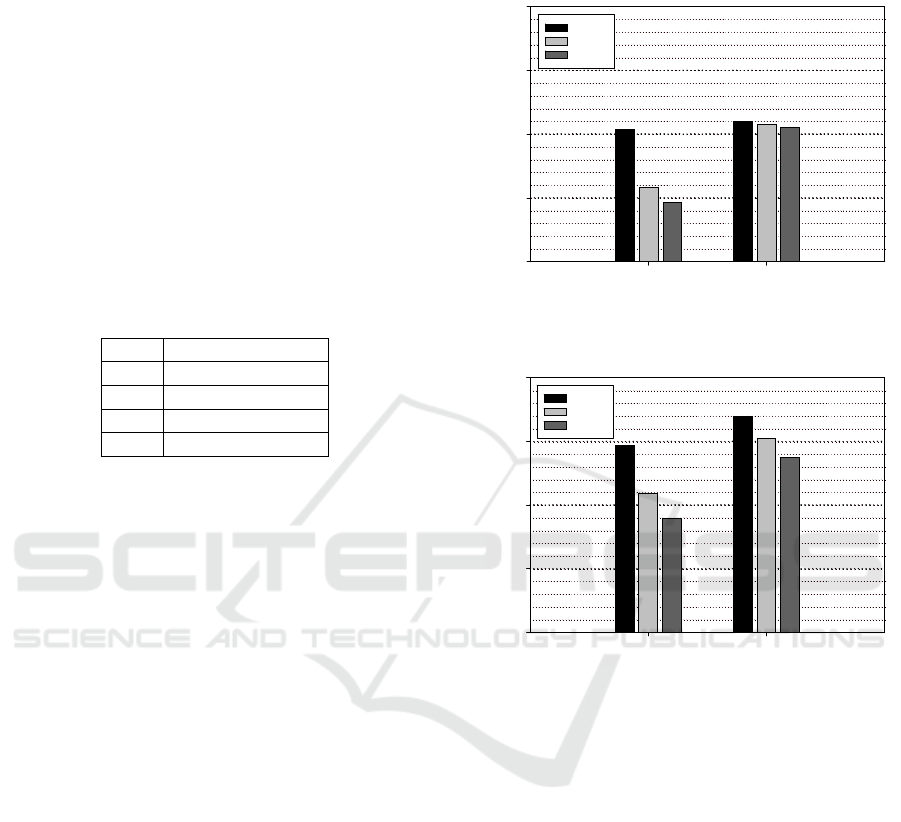
6.2.1 Performance with Regard to Parallel
Applications Service
Figure 2 presents D
RT
versus 1/λ
1
in the cases of
period 1/λ
2
= 20, 30 and 40. Figure 3 presents D
WRT
versus 1/λ
1
in the cases of period 1/λ
2
= 20, 30 and
40.
Figures 2 and 3 show that for both arrival rates
of gangs and for all cases of real-time jobs period,
the LJFS-ST method yields lower mean response
time than AFCFS-ST.
In each real-time job period case, the superiority
of LJFS-ST over AFCFS-ST is more significant in
the case of high load (1/λ
1
= 0.78). This is due to the
fact that the advantages of the LJFS-ST case are
better exploited when there is a sufficient number of
gangs in the queues, so that they can be selected
according to the LJFS-ST criteria.
The simulation results also reveal that the D
RT
increase with increasing load is more significant in
the larger periods. This may be explained by the fact
that the smaller the period of real-time jobs, the
larger is the possibility that fewer virtual machines
are available for gang service. Therefore, the
potential of the LJFS-ST policy is not completely
exploited, as large applications cannot find enough
VMs available to serve them.
0.84 0.78
D
RT
0
20
40
60
80
PER-20
PER-30
PER-40
1
1/λ
Figure 2: D
RT
ratio versus 1/λ
1
, soft real-time jobs with
period 20, 30 and 40.
0.84 0.78
D
WRT
0
20
40
60
80
PER-20
PER-30
PER-40
1
1/λ
Figure 3: D
WRT
ratio versus 1/λ
1
, soft real-time jobs with
period 20, 30 and 40.
In each case of the arrival rate of gangs, D
RT
decreases with increasing period size. This is
because when real-time jobs arrive less frequently,
then a smaller number of gangs are interrupted. The
D
RT
decrease with increasing period size is smaller
in the case of heavier load (1/λ
1
= 0.78). This is due
to the fact that when a real-time job blocks a gang,
then it does not only affect the performance of the
blocked gang, but it also affects the performance of
a number of subsequent gangs.
Figure 3 shows that the observations that hold for
the relative performance of the scheduling policies
in terms of the average response time of parallel
applications, also generally hold in terms of the
average weighted response time. In all cases D
WRT
is
larger than D
RT
. Therefore, the superiority of LJFS-
ST over AFCFS-ST appears more significant when
the job response time is weighted by the degree of
parallelism of the jobs.
Scheduling Different Types of Applications in a SaaS Cloud
149
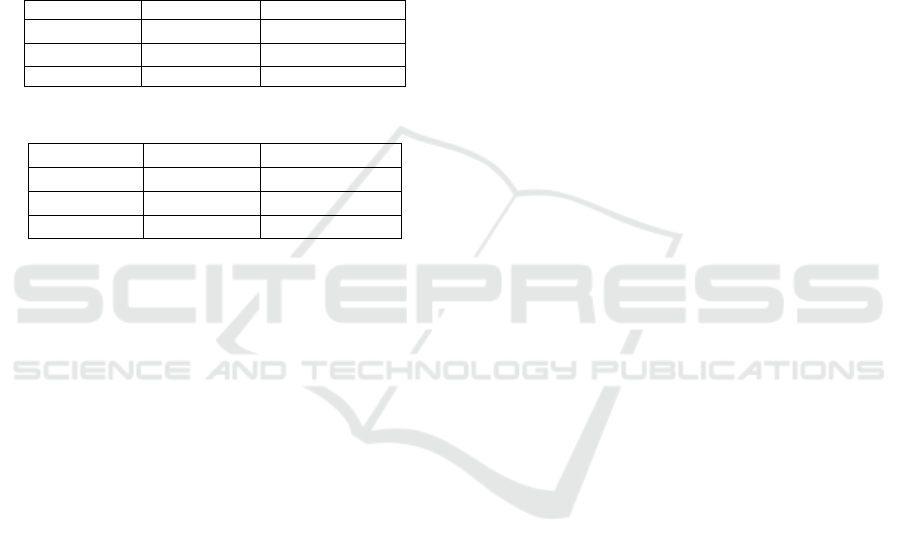
6.2.2 Performance with Regard to VM
Utilization
Tables 3 and 4 depict the mean virtual machine
utilization U versus 1/λ
1
, for period size 1/λ
2
= 20, 30
and 40 respectively. In most cases, the mean VM
utilization is either equal for both of the scheduling
policies or it is very slightly larger in the LJFS-ST
case. This is because the LJFS-ST policy schedules
large gangs first and consequently, it schedules jobs
on the available VMs more efficiently than the
AFCFS-ST policy.
Table 3: U for AFCFS-ST.
1/λ
1
0.84 0.78
PER-20 0.711 0.740
PER-30 0.672 0.716
PER-40 0.636 0.690
Table 4: U for LJFS-ST.
1/λ
1
0.84 0.78
PER-20 0.712 0.768
PER-30 0.672 0.718
PER-40 0.637 0.695
However, with both scheduling strategies, part of
the virtual machines utilization is comprised of
repeated gang work due to the real-time job service.
The amount of the repeated work depends on the
number of gang tasks, the service demand of each
task and the work that has already be done by the
gang at the moment of interruption. It is possible for
a gang to be interrupted several times during its
execution. This would be caused by multiple real-
time job arrivals at different virtual machines
serving tasks of the same gang.
For each λ
1
, the utilization slightly decreases
with increasing period size. This is due to the fact
that it is more possible to have to restart the parallel
applications execution when the period of real-time
applications is small, than when it is large. However,
due to the variability in gang service demand in our
workload model, only the gangs that have very large
service demands may experience multiple service
interruptions.
7 CONCLUSIONS AND FURTHER
RESEARCH
This paper examines the performance of two gang
scheduling policies, the LJFS-ST and the AFCFS-
ST, in a SaaS cloud in the presence of periodic soft
real-time single-task jobs. The objective is to
enhance the performance of parallel applications,
assuming that soft real-time jobs can tolerate a
delay.
Simulation results show that the relative
performance of the two scheduling methods depends
on the workload. With regard to the performance
metrics considered in this paper, the LJFS-ST
method performs better than the AFCFS-ST, in all
cases of workloads, providing promising results.
Furthermore, the superiority of LJFS-ST over
AFCFS-ST appears more significant when the
response time of parallel applications is weighted by
their degree of parallelism.
Our future research plans include the
examination of cases where along with gangs there
are also workflow applications. Moreover, we plan
to consider additional distributions for service
demands and investigate their impact on the
monetary cost charged to the end-users of the SaaS
cloud.
REFERENCES
Cusumano, M., 2010. Cloud computing and SaaS as new
computing platforms. Communications of the ACM.
ACM, 53(4), 27-29.
Beloglazov, A., Abawajy, J. and Buyya, R., 2012. Energy-
aware resource allocation heuristics for efficient
management of data centers for cloud computing.
Future Generation Computer Systems. Elsevier, 28(5),
755-768.
Bittencourt, L. F., Madeira, E. R. M. and Da Fonseca, N.
L. S., 2012. Scheduling in hybrid clouds.
Communications Magazine. IEEE, 50(9), 42-47.
Devi, U. C. and Anderson, J. H., 2006. Flexible tardiness
bounds for sporadic real-time task systems on
multiprocessors. In IPDPS’06, 20th IEEE
International Parallel and Distributed Processing
Symposium. IEEE, Rhodes Island, Greece.
Dillon, T., Wu, C. and Chang, E., 2010. Cloud computing:
issues and challenges. In AINA’10, 24th IEEE
International Conference on Advanced Information
Networking and Applications. IEEE, Perth, Australia,
pp. 27-33.
Hofer, C. N. and Karagiannis, G., 2011. Cloud computing
services: taxonomy and comparison. Journal of
Internet Services and Applications. Springer, 2(2), 81-
94.
Karatza, H. D., 2004. Simulation study of multitasking in
distributed server systems with variable workload.
Simulation Modelling Practice and Theory. Elsevier,
12(7), 591-608.
Karatza, H. D., 2006. Scheduling gangs in a distributed
system. International Journal of Simulation: Systems,
Science Technology. UK Simulation Society, 7(1), 15-
Sixth International Symposium on Business Modeling and Software Design
150

22.
Karatza, H. D., 2007. Performance of gang scheduling
policies in the presence of critical sporadic jobs in
distributed systems. In SPECTS’07, 2007
International Symposium on Performance Evaluation
of Computer and Telecommunication Systems. SCS,
San Diego, CA, pp. 547-554.
Karatza, H. D., 2008. The impact of critical sporadic jobs
on gang scheduling performance in distributed
systems. Simulation: Transactions of the Society for
Modeling and Simulation International. Sage
Publications, 84(2-3), 89-102.
Karatza, H. D., 2014. Scheduling Jobs with different
characteristics in distributed systems. In CITS’14,
2014 International Conference on Computer,
Information and Telecommunication Systems. IEEE,
Jeju Island, South Korea, pp. 1-5.
Kim, K. H., Buyya, R. and Kim, J., 2007. Power aware
scheduling of bag-of-tasks applications with deadline
constraints on DVS-enabled clusters. In CCGRID’07,
7th IEEE International Symposium on Cluster
Computing and the Grid. IEEE, Rio de Janeiro, Brazil,
pp. 541-548.
Leontyev, H. and Anderson, J. H., 2010. Generalized
tardiness bounds for global multiprocessor scheduling.
Real-Time Systems. Springer, 44(1-3), 26-71.
Moschakis, I. A. and Karatza, H. D., 2015. A meta-
heuristic optimization approach to the scheduling of
Bag-of-Tasks applications on heterogeneous Clouds
with multi-level arrivals and critical jobs. Simulation
Modelling Practice and Theory. Elsevier, 57, 1-25.
Papazachos, Z. C. and Karatza, H. D., 2015. Scheduling
bags of tasks and gangs in a distributed system. In
CITS’15, 2015 International Conference on Computer,
Information and Telecommunication Systems. IEEE,
Gijón, Spain, pp. 1-5.
Rimal, B. P., Choi, E. and Lumb, I., 2009. A taxonomy
and survey of cloud computing systems. In NCM’09,
5th International Joint Conference on INC, IMS and
IDC. IEEE, Seoul, Korea, pp. 44-51.
Stavrinides, G. L. and Karatza, H. D., 2008. In
SPECTS’08, 2008 International Symposium on
Performance Evaluation of Computer and
Telecommunication Systems. IEEE, Edinburgh, UK,
pp. 1-7.
Stavrinides, G. L. and Karatza, H. D., 2009. Fault-tolerant
gang scheduling in distributed real-time systems
utilizing imprecise computations. Simulation:
Transactions of the Society for Modeling and
Simulation International. Sage Publications, 85(8),
525-536.
Stavrinides, G. L. and Karatza, H. D., 2010. Scheduling
multiple task graphs with end-to-end deadlines in
distributed real-time systems utilizing imprecise
computations. Journal of Systems and Software.
Elsevier, 83(6), 1004-1014.
Stavrinides, G. L. and Karatza, H. D., 2011. Scheduling
multiple task graphs in heterogeneous distributed real-
time systems by exploiting schedule holes with bin
packing techniques. Simulation Modelling Practice
and Theory. Elsevier, 19(1), 540-552.
Stavrinides, G. L. and Karatza, H. D., 2012. Scheduling
real-time DAGs in heterogeneous clusters by
combining imprecise computations and bin packing
techniques for the exploitation of schedule holes.
Future Generation Computer Systems. Elsevier, 28(7),
977-988.
Stavrinides, G. L. and Karatza, H. D, 2014. The impact of
resource heterogeneity on the timeliness of hard real-
time complex jobs. In PETRA’14, 7th International
Conference on Pervasive Technologies Related to
Assistive Environments. ACM, Rhodes Island, Greece,
pp. 65:1-65:8.
Stavrinides, G. L. and Karatza, H. D., 2015. A cost-
effective and QoS-aware approach to scheduling real-
time workflow applications in PaaS and SaaS clouds.
In FiCloud'15, 3rd International Conference on
Future Internet of Things and Cloud. IEEE, Rome,
Italy, pp. 231-239.
Streit, A., 2005. Enhancements to the decision process of
the self-tuning dynP scheduler. In JSSPP’05, 11th
Workshop on Job Scheduling Strategies for Parallel
Processing. Springer, Cambridge, MA, pp. 63-80.
Terzopoulos, G. and Karatza, H. D., 2016. Bag-of-Tasks
load balancing on power-aware clusters. In PDP’16,
24th Euromicro International Conference on Parallel,
Distributed and Network-Based Processing. IEEE,
Heraklion, Crete.
Zhang, Y., Franke, H., Moreira, J. and Sivasubramaniam,
A., 2003. An integrated approach to parallel
scheduling using gang-scheduling, backfilling and
migration. IEEE Transactions on Parallel and
Distributed Systems. IEEE, 14(3), 236-247.
Scheduling Different Types of Applications in a SaaS Cloud
151
