The Octopus as a Model for Artificial Intelligence
A Multi-Agent Robotic Case Study
Alfonso Íñiguez
Swarm Technology, LLC Mesa, Mesa, AZ, U.S.A.
Keywords: Autonomous, Robotics, Artificial Intelligence, Multi-Agent, Swarm Intelligence, Parallel Processing.
Abstract: The aim of this paper is to investigate the curious cognition process exhibited by the octopus, and its
practical applicability to multi-agent systems. The paper begins by explaining the limitations of using the
human brain as a model to achieve artificial cognition and proposes an alternative model inspired by the
octopus’ distributed approach to solving problems. As a case study, a laboratory prototype demonstrates
awareness, autonomy, solidarity, expandability, and resiliency in a multi-robotic system. The cognition
model described in this paper is primarily algorithmic and does not explore the model creation process nor
semantics; rather, it lays the foundation and inspiration for a future realization as a Process for Agent
Societies Specification and Implementation (PASSI).
1 INTRODUCTION
The conventional approach in the attempt to achieve
artificial intelligence is to use the human brain as a
model of operation; in fact, there are operational
similarities between the computer processing unit
(CPU) and the human brain – both make decisions
by fetching and processing data from memory, and
both store the processed data in memory.
The downside of using the human brain as a
model for artificial intelligence is scaling; as the
complexity of the tasks increase, the performance
demand on the CPU proportionally increases.
Limitations remain even with the advent of
coprocessors — intended to offload tasks from the
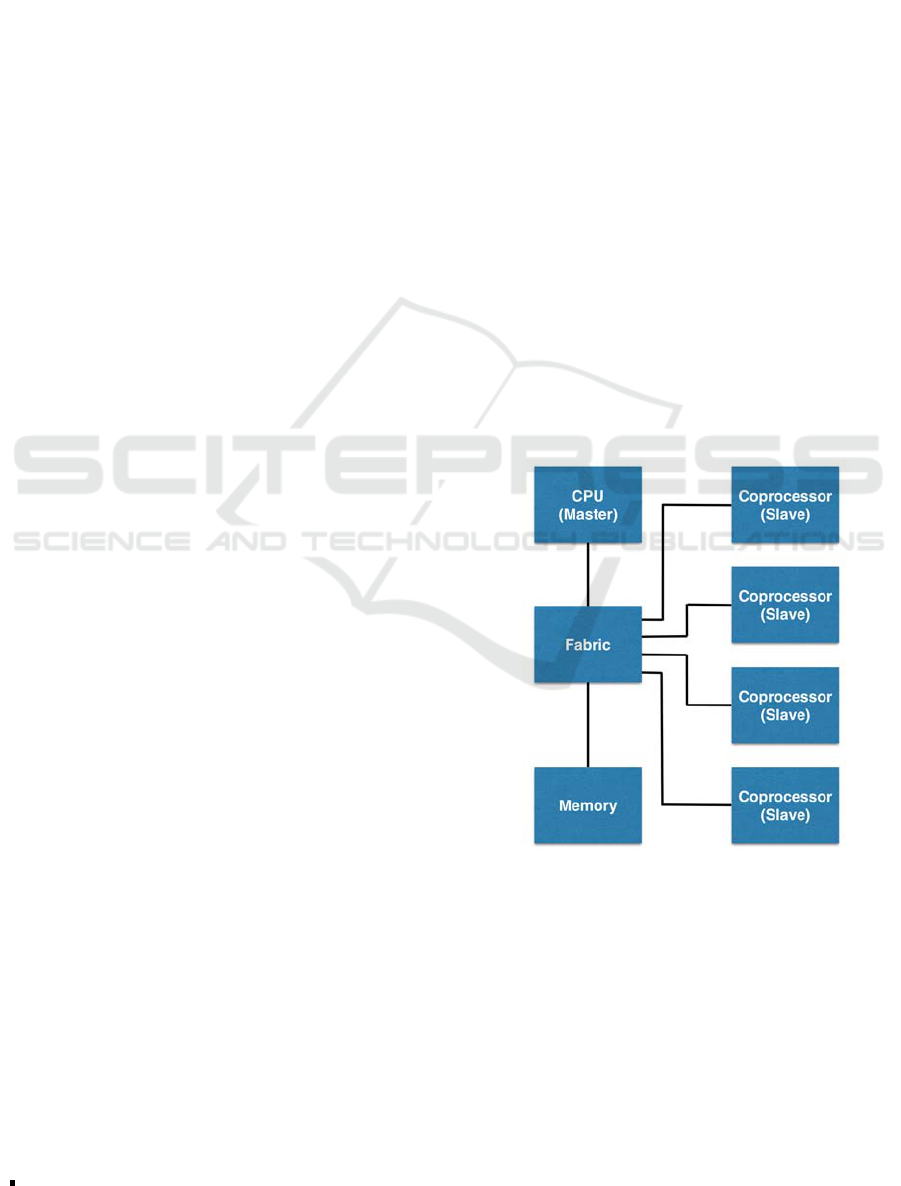
CPU. The traditional multiprocessing framework
(see Figure 1) suffers from two major drawbacks,
both caused by the architectural requirement that the
CPU must divide and distribute the threads.
First, a significant amount of the CPU's
processing time is consumed in managing the
coprocessing tasks. The management may include:
distributing tasks to the coprocessors according to
their capabilities, waiting for those tasks to be
completed before reassigning new tasks; and
responding to interrupts from coprocessors every
time a task is completed.
Second, a coprocessor will remain idle as it
awaits for a thread to be assigned to it by the CPU.
A multiprocessor system that alleviates the
management workload on the CPU while keeping
the co-processors busy is needed.
Figure 1: Traditional multiprocessing framework.
Given that robotic movement is ultimately
enabled by its processing capability, the same two
drawbacks that affect CPU/Coprocessor
performance limit robotic autonomy. Hence, to
enable robotic autonomy, it makes sense to begin by
solving the two computer processing drawbacks.
à Ã
´
siguez A.
The Octopus as a Model for Artificial Intelligence - A Multi-Agent Robotic Case Study.
DOI: 10.5220/0006125404390444
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 439-444
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
439

2 OCTOPUS COGNITION
Written records of octopuses leaving the water have
existed for over 2,000 years (Balme, 1991). The
Octopus Alpheus is known to leave the water to
crawl between tide pools (Norman, 2000). More
recently, Boyle (1991) wrote, “Octopuses are
particularly prone to escape from aquarium tanks.
Loose lids are of little value because the octopuses
will easily lift them and push their way out of the
tank” (Boyle 32).
2.1 Cognition Evidence
It is not surprising to learn that the octopus is
considered to be the most intelligent of all
invertebrates (Linden, 2002); it learns simple mazes
(Boal, 1996), uses landmark navigation while
foraging (Mather, 1991), and uses tools (Mather,
1994).
2.1.1 Cognition Efficiency
Experimentation results do not imply that octopuses
are smarter than human children; however, the
octopus is a model for efficient cognition given the
limited amount of available neurons in its brain —
500 million in the octopus as opposed to almost 100
billion in Homo sapiens.
Biologists at the Seattle Aquarium challenged a
female Enteroctopus dofleini — a giant Pacific
octopus — with a childproof bottle, the kind that can
puzzle Homo sapiens. The results were staggering,
“To open the lid it was necessary to push down on
the lid at the same time as turning it … the octopus,
accomplished this task in 55 minutes … Further
presentations resulted in a decrease of the average
opening time to 5 minutes” (Anderson, 2006).
2.1.2 Distributed Cognition
Distributed neurons allow the octopus’ arms to
problem-solve autonomously; the “arms are not
entirely under the control of the octopus' brain . . .
two thirds of its neurons reside not in its central
brain but out in its flexible, stretchable arms”
(Harmon, 2013).
The “Octopus’ arms have a mind of their own
… as a result, the arms can problem-solve how to
open a shellfish while [the octopus] is busy doing
something else, like checking out a cave for more
edible goodies” (Nuwer, 2013).
2.1.3 Arms React after Detachment
Researchers, working at St. George's University of
London and the Anton Dohrn Zoological Station in
Naples, Italy, demonstrated that, "the arms are
capable of reflex withdrawal to a 'noxious' stimulus
without reference to the brain." (Harmon 2013a)
Other experiments show an active nervous system
after detachment, “the arms can react after they’ve
been completely severed. In one experiment, severed
arms jerked away in pain when researchers pinched
them" (Nuwer, 2013).
2.1.4 Arm Ambidexterity
A series of interactions were performed to determine
if the octopus (Enteroctopus dofleini) had arm
preference when reaching for objects; the results
supported the hypothesis of ambidexterity of the
arms. All arms are equally willing to work; arm
selection is based on availability and relative
proximity (Wülker, 1910).
2.2 Summary of Principles of
Cognition
After investigating the behavior of the octopus and
the embedded cognition of its arms, we can clearly
see that the octopus — when viewed as a processing
system — is a superb model for efficient cognition.
Let’s now generalize the cognition principles
governing the octopus’ system. As a way of keeping
the principles as generic as possible, the arms will be
referred to as “members” and the octopus will be
called “system.”
2.2.1 Principle 1: Member Awareness
Each member must be aware of its surroundings and
abilities. This principle is derived from the fact that
each arm can react to its environment even when
detached from the head.
2.2.2 Principle 2: Member Autonomy
Each member must operate as an autonomous
master (not as a slave); this is essential to self-
coordinate allocation of labor. This principle is
derived from the fact that the arms are not entirely
under control of the octopus’ head.
2.2.3 Principle 3: Member Solidarity
Each member must cooperate in solidarity; when a
task is completed each member should
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
440
autonomously look for a new task (leveraging its
current position). This principle is derived from the
observed ambidexterity of the arms.
2.2.4 Principle 4: Member Expandability
The system must permit expansion where members
are dynamically aggregated. This principle is
derived from the fact that octopuses can regenerate
lost arms with ease (Harmon, 2013b).
2.2.5 Principle 5: Member Resiliency
The system must be self-healing; when members are
removed, the remaining members should undertake
the unfinished tasks. This principle is derived from
the fact that losing an arm is not considered
traumatic; octopuses occasionally lose an arm in
nature and function normally while the limb
regenerates (Levy, 2014).
The attributes described above may also be
referred to as the Five Principles of Swarm
Intelligence (Íñiguez, 2016).
2.3 Octopus’ Cognition Model
After defining the principles of the octopus’ arm
behavior, the next step in abstracting the octopus’
cognition model is to define an architectural
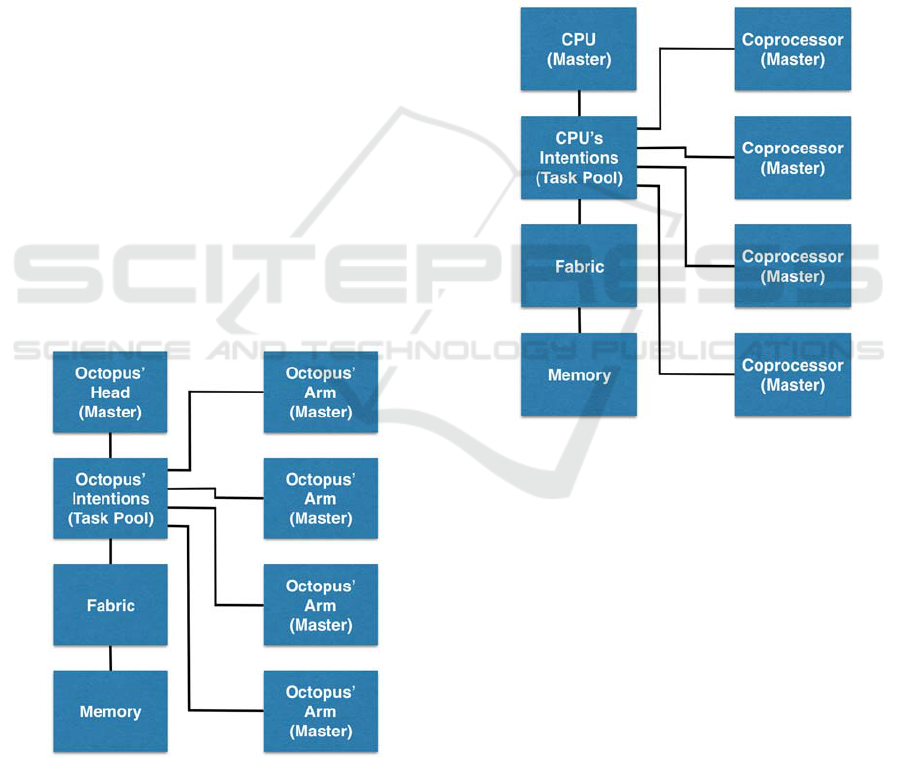
representation (see Figure 2).
Figure 2: Octopus’ Cognition Model.
3 APPLICABILITY OF THE
COGNITION MODEL
Notice the differences between the traditional
multiprocessing framework of Figure 1 and the
octopus’ cognition model of Figure 2. There are two
main differences:
First, the coprocessors of the traditional model
became masters instead of slaves.
Second, the CPU, which is equivalent to the
octopus’ head, does not directly communicate with
the coprocessors; instead, the coprocessors
autonomously read the octopus’ intentions, i.e. seek
tasks from the task pool.
Figure 3:
Solidarity Cell Architecture
.
3.1 Transposing the Cognition Model
The transposing of Figure 1 into Figure 2 resulted in
Figure 3. A fundamental principle of operation of
the proposed model is the cooperation in solidarity;
since each member is a processing cell in the
system, we will refer to this cognition model by the
name of Solidarity Cell Architecture (SCA).
The SCA model solves the two limitations of the
traditional model previously described in the
introduction. In the SCA model the CPU does not
spend a significant amount of time micromanaging
coprocessors — just as the octopus’ head does not
spend time micromanaging the arms — and the
coprocessors do not remain idle waiting for tasks to
be assigned.
The Octopus as a Model for Artificial Intelligence - A Multi-Agent Robotic Case Study
441
3.2 Further Description of the
Solidarity Cell Architecture
In general terms, the SCA model is to be described
as a method for processing information in parallel;
the system uses autonomous computer processing
cells to perform tasks needed by a central processing
unit. Each cell in the system is connected through a
switching fabric, which facilitates connections for
data transfer and arbitration between all system
resources. A cell has an agent, which is a software
module that may be transferred through the
switching fabric to a task pool containing the tasks.
The agent searches within the task pool for available
tasks that match the cell's instruction type. A task
may be broken into threads that are to be executed
sequentially or independently depending on recipes
constructed by the central processing unit.
Interdependent tasks within the task pool may be
logically combined as needed by the recipe. A
notification is sent from the task pool to the central
processing unit when a task or task thread is
completed.
Therefore, it is an object of this new architecture
to provide a method for parallel processing in a
multiprocessor system using coprocessors — or
autonomous robots — that proactively seek threads
to process (Íñiguez, 2013).
3.3 Applicability into Robotics
A recurring challenge in robotics is to build a biped
robot that has the balancing ability of humans. A
mechanism to account for continuous balancing is
needed; as the robot walks, climbs, or bends, it
needs to swing its arms autonomously to keep its
balance.
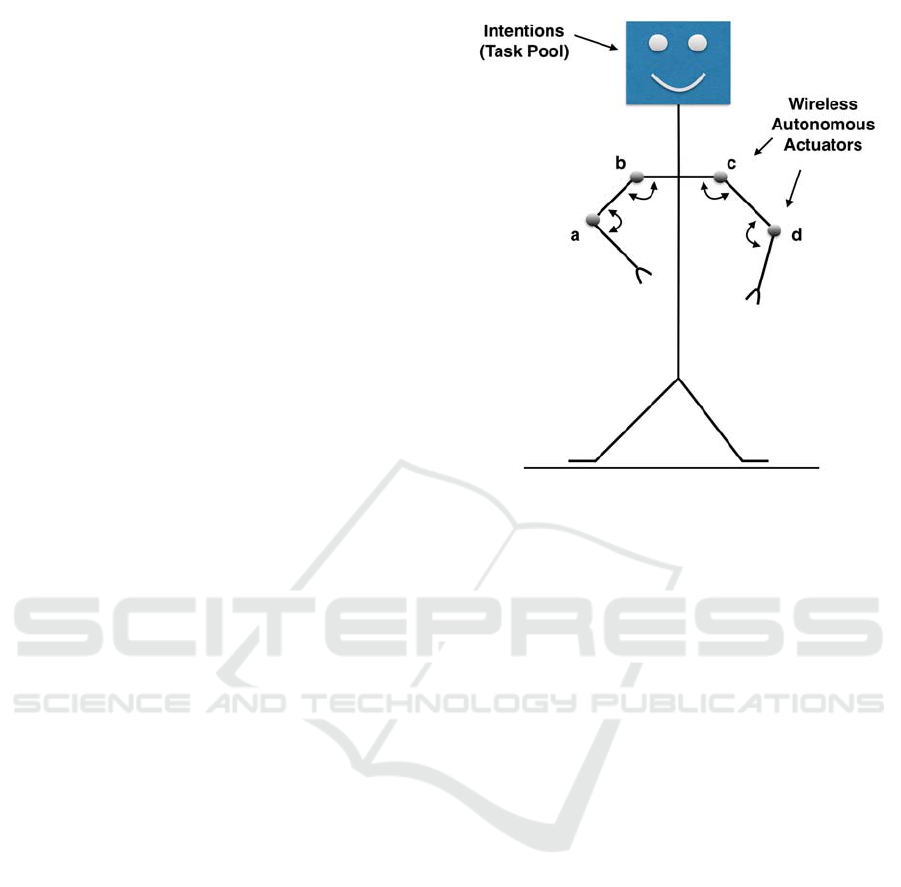
Figure 4 shows the conceptual balancing
mechanism; the shoulders and elbows — a, b, c, and
d —are equipped with actuators that continuously
and autonomously send wireless software agents to
seek tasks from the intention’s task pool – the
intention’s task pool is a module in which the
system’s central brain deposits its desire to maintain
balance. In this example, the intention’s task pool is
analogous to a cerebellum in charge of coordinating
and maintaining balance. However, as opposed to a
traditional cerebellum that sends commands to the
body, the biped robot follows the octopus’ model, in
which the arms autonomously send inquiring agents
to the task pool.
The breakthrough advantage of this
implementation is that the central brain system can
delegate the task of maintaining balance to an
Figure 4: Mechanism to account for continuous balancing.
electronic gyroscope that constantly deposits the
balancing requirements into the intention’s task
pool.
If the biped robot begins to lean to the left, then
the gyroscope will deposit an intention in the task
pool named “I need somebody to help me move my
center of gravity to the right.” The shoulders and
elbows continuously send agents looking for tasks;
when an agent finds a task in the task pool, it returns
to its actuator to execute the requirement. The
process is repeated continuously achieving human-
like balancing without direct intervention from the
central brain system.
4 ROBOTIC CASE STUDY
As a way to demonstrate the SCA model with a
proof-of-concept prototype, we adapted the biped
robot of Figure 4, into the streamlined laboratory
representation shown in Figure 5. Free-moving
wireless-connected tank robots represent the
shoulders and elbows. Hence, the designations of a,
b, c, and d originally used by the shoulders and
elbows in Figure 4 are now given to the tank robots
in Figure 5.
The intention is implemented by a gyroscope that
places “move left” or “move right” tasks into the
task pool.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
442
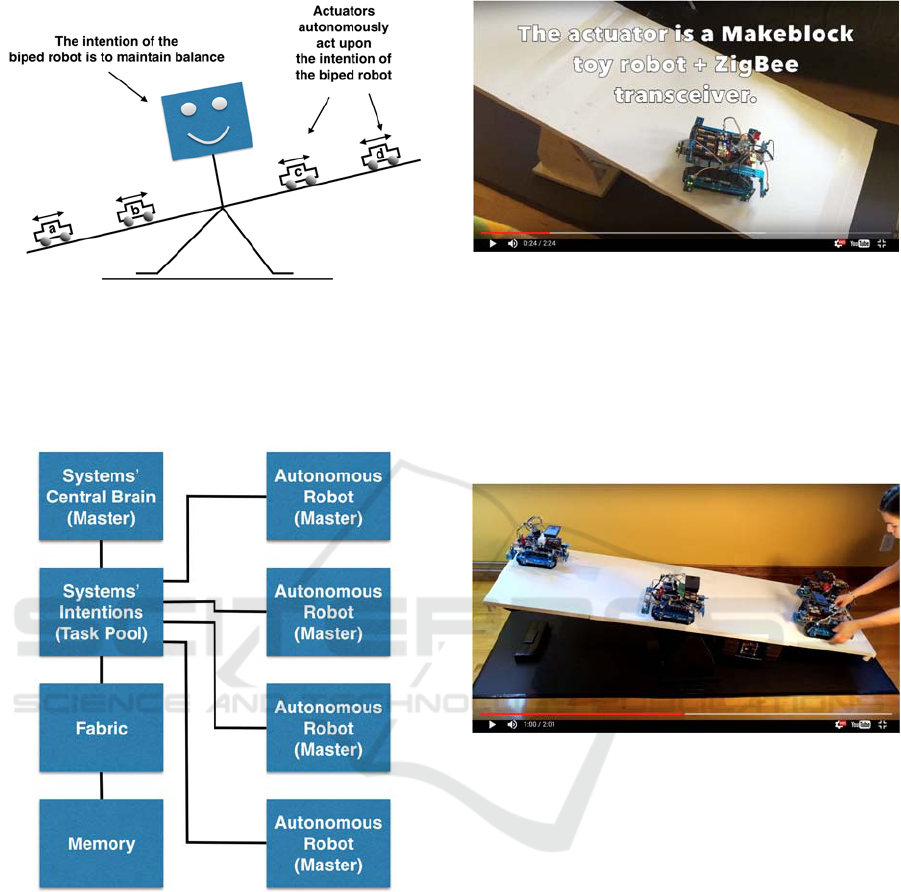
Figure 5: Proof-of-concept laboratory experiment.
The original octopus cognition model can be
transposed into the robotic architecture without
modification; the only difference between Figure 2
and Figure 6 is the terminology.
Figure 6: Block representation of the laboratory prototype.
4.1 Prototype Implementation
To build the prototype, we selected to work with off-
the-shelf components. The microcontrollers are
Arduino
TM
boards, the robots are a customized
version of Makeblock
TM
toy
tanks, and the wireless
communication is through Xbee
TM
(Zigbee)
transceivers. We have a YouTube video illustrating
the interaction between the tank robot and the
gyroscope:
https://www.youtube.com/watch?v=jq1EfxkneJI
Figure 7: Toy robot interacting with the gyroscope.
4.2 Complete System Implementation
The demonstration of the proof-of-concept prototype
exhibiting the five principles of cognition — also
known as the five principles of swarm intelligence
— is also available via YouTube:
https://www.youtube.com/watch?v=axxXz2BM0yw
Figure 8: The Five Principles of Swarm Intelligence.
5 CONCLUSION
Various companies and academic institutions are
actively researching the field of swarm intelligence;
a search on the topic reveals two distinct
approaches:
a) Each member is controlled through a central
computer, e.g. Intel’s 100 drones (Geiver, 2016).
b) Each member behaves autonomously without a
central computer; e.g., Harvard University’s 1024
Robot Swarm (Hotz, 2014).
Both approaches have merits and limitations
(Íñiguez, 2016).
In the case of a, members are slaves in a system
controlled by a central computer with sufficient
channels of communication. The results can be
visually spectacular — as illustrated by Intel’s
The Octopus as a Model for Artificial Intelligence - A Multi-Agent Robotic Case Study
443

drones. However, since a central computer dictates
the movement of each member, there is limited
flexibility to adapt to changing environments, such
as: x) members lost to unforeseen events, y)
members added to speed up the mission, or z)
members autonomously self-allocating labor.
Of course, the intricacy of the central software
may be increased to account for x, y, and z, but that
would make the central computer responsible for
real time response, it would increase vulnerability
due to single point of failure, and it would deviate
from the concept of swarm intelligence which is
defined as the collective behavior of decentralized,
self-organized systems.
In the case of b, members have the autonomy to
adapt without a central dictator. Considering that
each member possesses modest processing power —
as illustrated by Harvard University’s swarm of
robots — the results are truly impressive;
nevertheless, this type of behavior falls into the
realm of swarm flock. It does meet swarm
intelligence’s basic definition of collective behavior
of decentralized, self-organized systems, but it still
lacks the ability to autonomously distribute and
undertake allocation of labor.
If neither a nor b meets the requirements of
autonomous allocation of labor, then we need a
different approach.
As demonstrated in the proof-of-concept
protopype, the Solidarity Cell Architecture
effectively achieves the principles of awareness,
autonomy, solidarity, expandability, and resiliency;
it also solves the two major drawbacks described in
the introduction, i.e., CPU micromanagement and
coprocessor idleness, present in the traditional
multiprocessing framework.
REFERENCES
Balme, D. M. (1991). Aristotle: History of animals.
Cambridge, MA: Harvard University Press.
Norman, M. (2000). Cephalopods: A world guide.
Hackenheim, Germany: Conch.
Boyle, P. R. (1991). The UFAW handbook on the care and
management of cephalopods in the laboratory. Potters
Bar, England: UFAW.
Linden, E. (2002). The octopus and the orangutan. Dutton
(NY). 242 pp.
Boal. J.G. (1996). A review of simultaneous visual
discrimination as a method of training octopuses.
Biol. Rev. 71:157-190.
Mather, J.A. (1991). Navigation by spatial memory and
use of visual landmarks in octopuses. Journal of
Comparative Physiology. 168(491-497).
Mather, J.A. (1994). “Home” choice and modification by
juvenile Octopus vulgaris (Mollusca: Cephalopoda):
specialized intelligence and tool use? J. Zool. Lond.
233:359-368.
Anderson, R.C (2006). The Festivus Seattle Aquarium
38(1):7-9 TheCephalopodPage.org.
Nuwer, R 2013. Ten Curious Facts About Octopuses.
smithsonian.com.
Harmon K. (2013a). Octopus Chronicles, Even Severed
Octopus Arms Have Smart Moves.
Wülker (1910). Choice of arm usage in a Giant Pacific
Octopus, Enteroctopus dofleini.
Harmon K. (2013b). Octopus Chronicles How Octopus
Arms Regenerate With Ease.
Levy G. (2014). Self-Recognition Mechanism between
Skin and Suckers Prevents Octopus Arms from
Interfering with Each Other.
Íñiguez A. I. (2016). The Five Principles of Swarm
Intelligence, LinkedIn.
Íñiguez A. I. (2013). Parallel processing with solidarity
cells by proactively retrieving from a task pool a
matching task for the solidarity cell to process. U.S.
Patent 9,145,777.
Geiver L. (2016). Intel’s Entrance Into UAS, UAS
Magazine
Hotz R. L. (2014). Harvard Scientists Devise Robot
Swarm That Can Work Together. The Wall Street
Journal.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
444
