
Truly Social Robots
Understanding Human-Robot Interaction from the Perspective
of Social Psychology
Daniel Ullrich
1
and Sarah Diefenbach
2
1
Institute of Informatics, LMU Munich, Amalienstraße 17, 80333 Munich, Germany
2
Department of Psychology, LMU Munich, Leopoldstraße 13, 80802 Munich, Germany
Keywords: Social Robots, Human-Robot Interaction, HCI Theory, Social Psychology, Perception, Trust, Design Factors.
Abstract: Human-robot interaction (HRI) and especially social robots play an increasing role within the field of human-
computer interaction (HCI). Social robots are robots specifically designed to interact with humans, and
already entered different domains such as healthcare, transportation, or care of the elderly. However, research
and design still lack a profound theoretical basis, considering their role as social beings, and the psychological
rules that apply to the interaction between humans and robots. The present paper underlines this claim by a
list of central research questions and areas of relevance, and a summary of first results of own and others'
research. Finally, we suggest a research agenda and dimensions for a framework for social robot interaction,
which truly accounts for their social nature and relevant theory from social psychology.
1 INTRODUCTION
Social robots play an increasing role within the field
of human-computer interaction (HCI). In contrast to
industrial robots in the context of industry 4.0, social
robots are specifically designed to interact with
humans. Nowadays, the most popular areas of
application are healthcare (for an overview, see
Beasley, 2012), transportation, retail, care of the
elderly (e.g., Paro Robots, 2016), housekeeping, or
robots taking the role of a social companion or pet-
substitute (e.g., Robyn Robotics, 2016). With
technological advancements, further domains will
surely follow, so that the domain of social robots is
about to become one of the most important in human-
robot interaction (HRI). In this context, psychological
questions such as how a robot is perceived, whether
we trust or distrust it, accept or reject it, are of central
relevance (Taipale et al., 2015).
Already in the 90s, Nass and colleagues (1994)
coined the "Computers-Are-Social-Actors" (CASA)
paradigm, suggesting that people apply social rules
during their interaction with computers, which
naturally gains even more relevance in the particular
domain of social robots. Nevertheless, current
research and developments focus too much on
technological borders and possibilities, but disregard
social and psychological factors. Though HRI
researchers generally acknowledged social robots as
an important application domain, including studies on
anthropomorphism in social contexts (e.g., Fussel et
al., 2008), or specific relations between robot
behaviour and human perceptions (e.g., Hoffman et
al., 2014; Mok, 2016), an integrated view of these
findings is still missing. Relatively little attention is
paid to the essential nature of social robots as "social
beings among us", and mechanisms of social
perception and related phenomena of social
psychology in sum. Altogether, it seems that the
domain misses a theoretical grounding and
framework that fully accounts for the social nature of
social robots.
The present paper wants to make a first step towards
a better understanding of underlying mechanisms
related to the perception and interaction with social
robots, and a stronger integration of psychological
knowledge into research and design. We follow an
interdisciplinary approach, utilizing a combination of
theory and methods from HCI and psychology, in
order to provide a basis for successful and human-
centred robot design. More specifically, we want to
stress a dedicated perspective that understands social
robots "as a species" and highlights the psychological
rules that apply to the interaction between humans
and robots. We depict central research questions and
Ullrich D. and Diefenbach S.
Truly Social Robots - Understanding Human-Robot Interaction from the Perspective of Social Psychology.
DOI: 10.5220/0006155900390045
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 39-45
ISBN: 978-989-758-229-5
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
39

areas of relevance, summarize first results of own and
others' research, and present a research agenda for the
domain of social robots, that accounts for their social
nature and relevant theory from social psychology.
2 THE INTERMEDIATE
POSITION OF SOCIAL
ROBOTS
One specific characteristic of social robots is their
intermediate position between "usual" human-
computer interaction (HCI) and human,
interindividual interaction. When interacting with our
environment, our behaviour often relies on scripted
pattern. However, in the case of social robots, neither
general models of human-computer interaction nor
models about human interaction seem fully
transferrable. While being a piece of technology on
the one hand, their anthropomorphic shape, their
ability to speak and interaction capabilities suggest
robots to be “more” than technology and algorithms,
as also our own recent studies showed in impressing
ways (e.g., Männlein, 2016; Ullrich, 2017; Weber,
2016).
Thus, a central topic within the understanding of
social robots is that of projection and classification.
Humans classify objects with which they interact both
through bottom-up and top-down processes. The
former uses cues of the interaction artefact (it is small,
round, has digits 1-12 and watch hands) and the latter
prior learned knowledge (I know how a watch looks
like, I have seen it before). The particular feature of a
social robot is that it hold cues that qualifies for the
class “intelligent living being” and sometimes even
“human” (to an extent). Being perceived as a member
of such class results in specific user expectations and
behaviour (such as over-trust) which differs from
those of other classes of technology
A lack of understanding of the mechanisms affecting
our perception of intelligent technology can result in
flawed designs with yet unknown consequences. For
example, a less-than-ideal designed autopilot in the
automotive context lead to over-optimistic
expectations regarding its actual capabilities. The
driver developed over-trust in the system and used it
in situations that the system could not handle, which
ultimately resulted in a fatal accident. In sum, with
the current state of research, we seem to be
unprepared for this challenge and are not yet
exploiting the possibilities of social robots to full
potential.
In order to design and act responsibly, we need to
seriously acknowledge the social nature of social
robots and relations to the general mechanisms of
social psychology (e.g., responsibility attributions,
judgments and decision making in social contexts).
Only a thorough understanding of the social
perception and reactions towards robots can enable
adequate design decisions and exploit social robots to
full potential. Otherwise, unintended, sometimes
dramatic consequences, may occur, e.g., accidents
due to over-trust in "smart" technology as outlined
above. It needs a deeper exploration of the principles
that determine what people perceive and how they
behave when being confronted with social robots.
Naturally, such questions gain even more complexity
when we think of settings where more than one robot
is involved. To foresee peoples' reactions and
perceptions when being confronted with social
robots, a thorough understanding of social robots as a
"species" and the unfurling human-robot relation is
required. To translate such insights into adequate
design solutions, it needs insights about the
consequences of specific robot properties, and the
kind of reactions they afford.
With an interdisciplinary background in psychology
and computer science, our vision is to bridge
knowledge from the two areas towards a human-
centred design of social robots, with an emphasis on
the effects of social context. Both fields provide
manifold theories and insights of interaction with
technology or humans respectively that may be
fruitfully combined. For example, in the HCI context,
this may be general models of user experience and
evaluation of interactive technology (Law and van
Schaik, 2010) or approaches to model artificial
intelligence (e.g., Cohen and Feigenbaum, 2014). In
social psychology, theories about social roles, social
identity, group dynamics and attribution mechanisms
(Smith et al., 2014) could support the shaping of
social robot behaviour and task suitability.
3 CENTRAL RESEARCH
QUESTIONS AND FIRST
INSIGHTS INTO SOCIAL
ROBOT INTERACTION
The present section depicts exemplary research
questions and first insights from own and others'
studies, underlining the need for a stronger
integration of (social) psychological research within
the domain of social robots. After that, we extract
three general dimensions of interest in social robot
HUCAPP 2017 - International Conference on Human Computer Interaction Theory and Applications
40

interaction, forming a basis for future research and a
systematic link between design factors and
psychological consequences.
3.1 Personality: What Character Do
Humans Appreciate in One
Situation or the Other?
One central question within any social situation is the
perception of the others' character and consequences
for liking and reactions. This of course, also applies
to the interaction with social robots. HRI research
already showed that robot personality is relevant, that
subtle changes in a robot’s appearance can lead
differences in perceived robot personality, and further
effects on social aspects like trust, acceptance or
compliance (e.g., Goetz et al., 2003; Kim et al., 2008;
Salem et al., 2015; Walters et al., 2008). However, a
systematic view on these findings is still missing,
leaving unclear whether there is a general kind of
robot personality that promotes or diminishes liking
and acceptance. There actually are two common,
contradicting theories, with little empirical evidence
in HRI research for both of them. The first is
similarity attraction, i.e., a person chooses and prefers
to interact with other people/robots similar to them
(e.g., Byrne, 1971; Lee et al., 2006; Tapus et al.,
2008). The second is the complementary principle,
stating that a person is more attracted to people with
personality traits that are contrary to their own (e.g.,
Leary, 2004; Lee et al., 2006; Sullivan, 2013).
While previous research explored robot personality
and effects on liking as an isolated factor, also the task
context could be of relevance, and personality and
task context may interact with each other. Just like we
expect different behaviours/shades of personality
(e.g., encouraging, critical) from a friend between
different situations, we may also judge different robot
personalities as more or less appropriate from one
situation to the other. Thus, design recommendations
for robot personality may vary depending on the
specific area of application. An own study found first
evidence for this assumption (Männlein, 2016). We
explored effects of three different robot personalities
in four different usage scenarios. While in some
scenarios, a neutral, conservative personality was
preferred, in others, participants wanted a robot with
strong character, which could be a positive (nice,
friendly) or even a negative (stubborn, grumbling)
personality. As a general tendency, differences in
robot personality were more relevant in exploration-
oriented scenarios (e.g., a social robot as house mate)
and less relevant in goal-oriented scenarios (e.g., a
social robot selling a train ticket).
3.2 How Much Do We Rely on Robots'
Judgments - Compared to Human
Judgments?
As already outlined above, trust in robots' judgments
and capabilities is a central factor to foresee the
reactions towards robots and to design responsibly.
For a first exploration of the basis level of trust
towards robots (compared to humans) we ran a
replication of the famous Asch (1951) paradigm in
the context of social robots (Ullrich et al., 2017).
Asch explored peoples' reactions to majority opinions
on their own perceptions and judgments. The
experimental setting poses a simple task: Identifying
a line out of three lines that matches a reference line.
In the control condition, nearly all participants are
able to perform the task correctly and pick the right
line. Variations of social context then demonstrate the
influence of group opinions on individual
judgements. It showed that people begin to mistrust
their own perceptions when their social environments
comes to other "perceptions" then their own. If
surrounded by confederates, instructed to pick a
wrong line, people tend to adjust their judgments as
well and pick a wrong line then, even if their
perception probably tells them otherwise. However,
in another experimental condition, already one among
the many confederates who picks the right line could
induce positive encouragement and a trend towards
more correct judgments.
In our replication study, one of the confederates was
a social robot, who participated in the experiment as
well (see Figure 1). Participants entered their
judgments through a computer interface, and were
also displayed the (seeming) judgments of all other
participants, including the robots’. The general trend
of results was that the social impact of the robot on
individual judgments was even higher than that of the
other participants. Especially the effect of positive
encouragement was more pronounced than if a human
participant was the only one giving the correct
answer. This shows, the generally high level of trust
towards social robots, and, as in the present case, how
this effect may be used for positive encouragement
(e.g., in the field of therapy/rehabilitation. If the robot
believes in my skills, I will do the same, and the
robot's optimistic judgments may be even more
powerful than what the doctor says.) On the other
hand, it also hints at the high sensibility and
responsibility related to the design of social robots. If
there is such a high potential for trust in social robots,
it is essential that such trust is used in an adequate
way, and to avoid over-trust.
Truly Social Robots - Understanding Human-Robot Interaction from the Perspective of Social Psychology
41
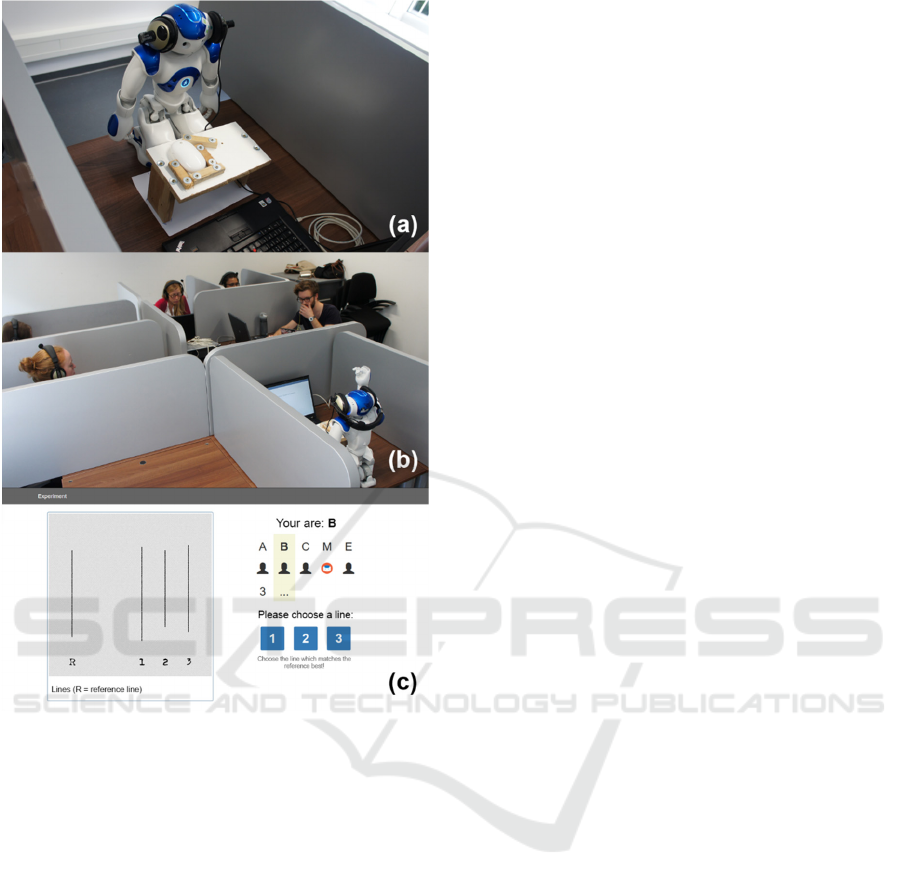
Figure 1: Replication study of the Asch paradigm on
conformity and perception with a social robot as
participant. (A) shows the robots’ cubicle and custom user
interface, (b) the experimental situation and (c) the on
screen user interface for participants.
3.3 Responsibility: How Much
Accountability Do We Assign to
Robots – or Ourselves?
Closely related to the issue of trust and distrust is the
topic of responsibility, and how much accountability
humans assign to robots, compared to other humans.
Again, mechanisms from social psychology appear as
a helpful start to understand in which situations what
level of accountability is assigned. Though trusting
robots in general, human's attributions also reflect the
concern for self-protection, and making others'
accountable for mistakes. This effect has already been
demonstrated in the HCI domain in various fields, but
gains increasing importance in the domain of social
robots, where accountability attributions have severe
consequences for the following reactions towards
robots as social agents. For example, a study by Moon
(2003) in the field of consumer psychology explored
responsibility attributions in the context of computer
aided purchase decisions. In general, the results
reflect a self-serving bias, where consumers tend to
blame computers for negative outcomes but take
personal credit for positive ones. However, this effect
is also moderated by the personal history of self-
disclosure ´between human and computer. In a more
intimate relationship, consumers are more willing to
credit the computer for positive outcomes, and more
willing to accept responsibility for negative
outcomes. Such effects, of course, are also highly
relevant in the domain of social robots that even
provides more room for relationship building than
just "usual" human-computer interaction.
3.4 In- or Outgroup: What Makes
Robots Being One of Us? What Are
the General Dimensions of Social
Robot Perception?
Finally, central to all the matters about trust,
responsibility, and characterization, and the question
to what degree mechanisms of social interaction may
apply to the domain of social robot interaction,
appears the question about what makes robots being
one of us, and the general dimensions of social robot
perception. As outlined in the introduction section,
the interaction with social robots can be positioned
somewhere between normal human-human and
human-computer interaction. Subtle differences in
their design may decide about mechanisms of
projection and classification in one or the other
direction, and in consequence, the activated
psychological processes when entering the
interaction. To consider this in design, an important
prerequisite is to know the general dimensions along
which we classify a robot as social being or not, and
which design factors are relevant for the overall
perceived human-likeness.
In an experimental study (Weber, 2016) we explored
the relative impact on perceived human-likeness for
two central factors in social robot design, namely,
motion and speech. In our study, the role of the social
robot was applied in the sports context, more
specifically, being a karate teacher, giving
instructions for specific karate moves (see Figure 2).
Each factor (motion, speech) was realized in three
degrees of differing fidelity by help of a Nao robot,
and through systematic combination, the relative
impact of these factors was tested. Overall, speech
was found to be more relevant than motion for
perceived human-likeness, global impression, and
HUCAPP 2017 - International Conference on Human Computer Interaction Theory and Applications
42

general preference. Of course, this finding cannot be
generalized yet and further research with a wide range
of settings and other design factors and robot-types is
necessary. However, it already reveals the importance
of dedicated knowledge on the specific effects of
single design factors and their relative importance.
Such insights allow concentrating design efforts on
the most relevant parts and consequences from a
psychological perspective.
Figure 2: A social robot teaching karate moves.
4 OUTLOOK AND RESEARCH
AGENDA
As exemplified by the questions raised in the
preceding paragraphs, the overall aim of future
research around social robot interaction must be a
better understanding of the underlying psychological
mechanisms and exploration of its impact on robot
properties, design fundamentals, and dynamics in
social contexts. More specifically, our research
agenda suggests three fundamental directions. First, a
thorough exploration of psychological mechanisms
and dynamics of social interaction, through a series of
experiments, with varying independent (e.g.,
personality, anthropomorphism) and dependent
variables (e.g., trust, human-likeness, perceived will,
behaviour correlates of over-/under-trust). In our
experiments, we used a NAO robot as representative
for the class of social robots. Although our own
research as well as others’ show that a high fidelity
humanoid robot like Sophia (Hanson Robotics, 2016)
is not necessarily needed to evoke social effects (e.g.,
social presence, Hoffman et al, 2015), a broader
variation of fidelity within the same experimental
settings is preferable to explore the range of effects.
Second, a systematic exploration of the design space
and the relevance of single design factors for
perceptions, perceived character, trust, and
acceptance, with the goal to derive design pattern for
an intended robot experience in different scenarios,
areas of application, and contextual requirements
(e.g., security-related issues).
Third, an exploration of group dynamics in settings
with multiple social robots. As already noted above,
designing for social robot interaction gains even more
complexity in settings where more than one robot is
involved. This for example, is already the case in the
Japanese Henn na Hotel, where the human staff was
almost fully replaced by social robots, who are now
running the reception, doing cleaning services etc.
(see Figure 3). In order to foresee the emerging
dynamics in such settings, knowledge about the
special characteristics in multi-robot interaction is
crucial. This includes, for example to develop
paradigms for multi-robot-collaboration studies, and
to explore how findings from studies on single robot-
human interaction might change when robots
constitute the majority.
Figure 3: Social robots running the reception at the
Japanese Henn na hotel (www.h-n-h.jp).
Truly Social Robots - Understanding Human-Robot Interaction from the Perspective of Social Psychology
43

Finally, knowledge from all three research directions
must be synthesized in an integrative model on social
robots "as a species", providing an overview of
relevant mechanisms and variables of social robot
interaction, and their interrelations. Such knowledge
will then allow design recommendations for specific
domains and use cases.
5 CONCLUSION
As exemplified above, entering the domain of social
robots, means entering a domain that asks for other,
possible even more sensible and complex
considerations, than HCI design per se. While social
robots form a great potential to enrich our society,
profound knowledge about the peculiarities of their
species is needed, to bring them into our world with
best effect, and support a fruitful collaboration
between research and practice. We hope the present
considerations may help to outline the importance of
this endeavour, and that our studies will provide a
basis to create better, trusted, and accepted social
robots, in a way that positively contributes to human
(robot) society.
ACKNOWLEDGEMENTS
We thank Simon Männlein, Thomas Weber, and
Valentin Zieglmeier for their effort of planning and
conducting experiments, as their help was crucial for
our research.
REFERENCES
Asch, S. E., 1951. Effects of group pressure upon the
modification and distortion of judgments. Groups,
leadership, and men, 222-236.
Bartneck, C., Kulić, D., Croft, E., Zoghbi, S., 2009.
Measurement instruments for the anthropomorphism,
animacy, likeability, perceived intelligence, and
perceived safety of robots. International journal of
social robotics, 1(1), 71-81.
Beasley, R. A., 2012. Medical Robots: Current Systems and
Research Directions. Journal of Robotics 2012, 14.
Byrne, D. E., 1971. The attraction paradigm, volume 11.
Academic Press.
Cohen, P. R., Feigenbaum, E. A. (Eds.), 2014. The
handbook of artificial intelligence (Vol. 3).
Butterworth-Heinemann.
Fussell, S. R., Kiesler, S., Setlock, L. D., Yew, V., 2008.
How people anthropomorphize robots. In Proceedings
of the 3rd ACM/IEEE international conference on
Human robot interaction, 145-152. ACM.
Goetz, J., Kiesler, S., Powers, A., 2003. Matching robot
appearance and behavior to tasks to improve human-
robot cooperation. In The 12th IEEE International
Workshop on Robot and Human Interactive
Communication, 2003. Proceedings. ROMAN 2003,
55–60. IEEE.
Hanson Robotics, 2016. Retrieved November 30, 2016
from http://www.hansonrobotics.com/robot/sophia/
Hoffman, G., Birnbaum, G. E., Vanunu, K., Sass, O., Reis,
H. T., 2014. Robot responsiveness to human disclosure
affects social impression and appeal. In Proceedings of
the 2014 ACM/IEEE international conference on
Human-robot interaction, 1-8. ACM.
Hoffman, G., Forlizzi, J., Ayal, S., Steinfeld, A., Antanitis,
J., Hochman, G., ... & Finkenaur, J., 2015. Robot
presence and human honesty: Experimental evidence.
In Proceedings of the Tenth Annual ACM/IEEE
International Conference on Human-Robot Interaction,
181-188. ACM.
Kim, H., Kwak, S. S., Kim, M., 2008. Personality design of
sociable robots by control of gesture design factors. In
ROMAN 2008 - The 17th IEEE International
Symposium on Robot and Human Interactive
Communication, 494–499. IEEE.
Law, E. L. C., van Schaik, P., 2010. Modelling user
experience–An agenda for research and practice.
Interacting with computers, 22(5), 313-322.
Leary, T., 2004. Interpersonal diagnosis of personality: A
functional theory and methodology for personality
evaluation. Wipf and Stock Publishers.
Lee, K.M., Peng, W., Jin, S.-A., Yan, C., 2006. Can Robots
Manifest Personality?: An Empirical Test of
Personality Recognition, Social Responses, and Social
Presence in Human-Robot Interaction. Journal of
Communication, 56(4), 754–772.
Männlein, S., 2016. Exploring robot-personalities Design
and measurement of robot-personalities for different
areas of application. Master-Thesis, LMU Munich.
Mok, B., 2016. Effects of proactivity and expressivity on
collaboration with interactive robotic drawers. In 2016
11th ACM/IEEE International Conference on Human-
Robot Interaction (HRI),
633-634. IEEE.
Moon, Y., 2003. Don’t blame the computer: When self-
disclosure moderates the self-serving bias. Journal of
Consumer Psychology, 13(1), 125-137.
Nass C., Steuer, J., Tauber, E.R., 1994. Computers are
social actors. Computer Human Interaction (CHI)
Conference: Celebrating Interdependence 1994, 72–
78.
Paro Robots USA. 2014. PARO Therapeutic Robot.
Retrieved October 20, 2016 from
http://www.parorobots.com/
Robyn Robotics Ab. 2015. JustoCat. Retrieved October 20,
2016 from http://www.justocat.com/
Salem, M., Lakatos, G., Amirabdollahian, F., Dautenhahn,
K., 2015. Would You Trust a (Faulty) Robot?: Effects
of Error, Task Type and Personality on Human-Robot
Cooperation and Trust. Proceedings of the Tenth
HUCAPP 2017 - International Conference on Human Computer Interaction Theory and Applications
44

Annual ACM/IEEE International Conference on
Human-Robot Interaction, 141–148. ACM.
Smith, E. R., Mackie, D. M., Claypool, H. M., 2014. Social
psychology. Psychology Press.
Sullivan, H. S., 2013. The interpersonal theory of
psychiatry. Routledge.
Taipale, S., Luca, F. D., Sarrica, M., Fortunati, L., 2015.
Social Robots from a Human Perspective. In Springer
International Publishing.
Tapus, A., Tapus, C., Mataric, M. J., 2008. User—robot
personality matching and assistive robot behavior
adaptation for post-stroke rehabilitation therapy.
Intelligent Service Robotics, 1(2), 169–183.
Ullrich, D., 2017, accepted. Robot personality insights.
Designing suitable robot personalities for different
domains. I-com Journal of Interactive Media.
Ullrich, D., Butz, A., Diefenbach, S., 2017, under review.
More than just human. The psychology of trust in social
robots.
Weber, T., 2016. Show me your moves, Robot-sensei! The
influence of motion and speech on perceived human-
likeness of robotic teachers. Bachelor-Thesis, LMU
Munich.
Walters, W. L., Syrdal, D. S., Dautenhahn, K., Boekhorst,
R., Koay, K. L., 2008. Avoiding the uncanny valley:
Robot appearance, personality and consistency of
behavior in an attention-seeking home scenario for a
robot companion. Autonomous Robots, 24(2), 159–178.
Truly Social Robots - Understanding Human-Robot Interaction from the Perspective of Social Psychology
45
