
Assisted Feature Engineering and Feature Learning to Build
Knowledge-based Agents for Arcade Games
Bastian Andelefski and Stefan Schiffer
Knowledge-Based Systems Group, RWTH Aachen University, Aachen, Germany
Keywords:
Assisted Feature Engineering, Feature Learning, Arcade Learning Environment, Knowledge-based Agents.
Abstract:
Human knowledge can greatly increase the performance of autonomous agents. Leveraging this knowledge
is sometimes neither straightforward nor easy. In this paper, we present an approach for assisted feature
engineering and feature learning to build knowledge-based agents for three arcade games within the Arcade
Learning Environment. While existing approaches mostly use model-free approaches we aim at creating a
descriptive set of features for world modelling and building agents. To this end, we provide (visual) assistance in
identifying and modelling features from RAM, we allow for learning features based on labeled game data, and
we allow for creating basic agents using the above features. In our evaluation, we compare different methods
to learn features from the RAM. We then compare several agents using different sets of manual and learned
features with one another and with the state-of-the-art.
1 INTRODUCTION
In many domains, the knowledge of domain experts
can greatly help in constructing agents that perform
well in a certain task. However, how to transfer such
knowledge from the expert into an agent formulation
is often neither obvious nor easy to do. In this paper,
we tackle the creation of knowledge-based agents for
arcade style games. We do so by means of assisted
feature engineering and feature learning. The resulting
features are then used to construct knowledge-based
agents. The goal is to make use of expert knowledge
as conveniently as possible. We leverage human pat-
tern recognition skills and modelling competence and
combine it with machine learning techniques. With
our approach we maximize the impact of training data
in the learning and keep the agent’s decision making
traceable.
For our application domain, we chose the Arcade
Learning Environment (ALE) introduced by Belle-
mare (Bellemare et al., 2013). Based on the Atari
2600 emulator Stella, it provides a unified interface
for a large number of arcade games. Notably, this in-
terface only offers raw data, specifically screen and
RAM content as well as the current score. As a re-
sult, most agents have so far sidestepped the absence
of an explicit world model by using model-free ap-
proaches. An early ALE paper by Naddaf (Naddaf,
2010) is an interesting exception to this trend. Naddaf
compares several approaches of reinforcement learn-
ing and planning, including a few attempts at creating
better features by image recognition. While this pre-
processing does increase performance compared to
the raw image data, it does not result in significant
improvements over the raw RAM data. These results
seem to indicate, that the RAM contains all relevant
information in a format that is well suited to machine
learning algorithms. It should therefore be possible to
isolate important features and turn them into a simple
world model.
We investigate this by building a toolkit and frame-
work that makes it simple and fast to analyze the data
and create appropriate world models from informa-
tion contained in the RAM. Our goal is to use these
tools to explore possible benefits of using experts and
a model-based approach. We do this by using domain
knowledge and human pattern recognition skills to de-
fine highly relevant features. These features are then
used to construct agents using decision tree learning.
The outline of the paper is as follows. We start by
introducing the background of our work, namely the
Arcade Learning Environment and the games we use
as well as the scikit learning toolkit and the learning
algorithms we use. After reviewing related work on
arcade game agents and feature learning we present
our approach. We detail our assistance with analysing
the RAM for manual feature creation and elaborate
on our feature learning. A brief view on our agent
228
Andelefski B. and Schiffer S.
Assisted Feature Engineering and Feature Learning to Build Knowledge-based Agents for Arcade Games.
DOI: 10.5220/0006202602280238
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 228-238
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

design is followed by an comprehensive evaluation
of the feature learning. We then compare the agents’
performance in playing arcade games with different
sets of features and with the state-of-the-art.
2 BACKGROUND
We introduce the frameworks and libraries that the
work described in this paper is based on. Further,
we present the foundations that underlie the learning
methods we use in our toolkit.
2.1 The Arcade Learning Environment
The Arcade Learning Environment was introduced by
Bellemare as an engaging way to compare game play-
ing agents. The benchmark is based on the classic
gaming console Atari 2600
1
and offers a wide selec-
tion of highly diverse games with different control
schemes and goals. One of the most engaging quali-
ties of ALE is the extremely restricted nature of the
system. While the games feature non-essential infor-
mation to make them more engaging to players, they
are running on a platform with only 128 bytes of RAM
and 18 possible actions. These actions are listed in
Table 1.
This dichotomy creates interesting AI domains that
are quite complicated, but remain within the compu-
tational scope of modern hardware. The number of
actions is reasonably small which makes it interesting
also for planning approaches. But even in learning-
based approaches it is helpful, because the training
data for a game playing agent is spread across fewer
actions and therefore more likely to be decisive.
2.2 Scikit-learn
Both, our feature learning and our game playing agent
are based on machine learning methods. To ensure
reliable performance and save time on our implemen-
tation, we use the machine learning library scikit-learn
(Pedregosa et al., 2011) for all machine learning meth-
ods in this paper.
Scikit-learn
2
was first introduced in 2007 and has
grown into an extensive resource for state-of-the-art
implementations of machine learning algorithms. Its
high performance, active maintenance and liberal BSD
license make it an obvious choice among the long list
of machine learning libraries.
1
https://en.wikipedia.org/wiki/Atari_2600
2
http://scikit-learn.org/
2.3 Learning Methods
We now give a short introduction into the classifiers
used in our feature learning approach. A discussion
of why each classifier was chosen can be found in
Section 4.3.1.
Random trees
are a way to counteract overfitting
with decision tree learning. With classical approaches
to decision trees it is not possible to increase general-
ization and accuracy at the same time. Random trees
achieve this by training multiple decision trees with
random sub-sets of the feature vector and training data.
A collection of such trees then yields a random deci-
sion forest (Ho, 1998). Since the trees in the forest are
trained independently, the generalization capabilities
can be raised without sacrificing the accuracy. The
individual trees classification results are combined, for
instance, by a majority vote (Breiman, 2001; Friedman
et al., 2001). With an increasing number of trees in the
forest very high accuracy results can be achieved (Ho,
1998).
Support vector machines
(SVMs) is a type of lin-
ear classifier, meaning that it tries to divide the input
space with a hyperplane. This creates a binary classifi-
cation, with the hyperplane as the decision boundary.
The defining property of SVMs is, that they create
this hyperplane such that it maximizes the distance
between the two classes.
To avoid the linear restrictions of SVMs, the input
space can be mapped to a higher-dimensional feature
space through the ’kernel trick’. There are also sev-
eral methods like ’one-versus-all’ and ’one-versus-one’
to allow multiple classes by splitting up the problem
(Boser et al., 1992; Bishop, 2006).
Nearest neighbor classifiers
are the only entirely
model-free classifier in our selection. This means that
they do not assume an underlying structure. Instead,
they retain the entire training data as it was provided
to them. New inputs are then categorized by find-
ing the closest known data points, called the ’nearest
neighbors’. The classifier votes among the selected
neighbors and then outputs the winning class (Fix and
Hodges Jr, 1951; Bishop, 2006).
2.4 Game Descriptions
This section gives a brief explanation of the games
that we chose to focus on, namely Space Invaders,
Bowling, and Private Eye. A basic understanding of
the game mechanics is required to understand some of
the examples throughout this paper.
Assisted Feature Engineering and Feature Learning to Build Knowledge-based Agents for Arcade Games
229

Table 1: List of possible actions in ALE.
noop (0) fire (1)
up (2) right (3) left (4) down (5)
up-right (6) up-left (7) down-right (8) down-left (9)
up-fire (10) right-fire (11) left-fire (12) down-fire (13)
up-right-fire (14) up-left-fire (15) down-right-fire (16) down-left-fire (17)
reset* (40)
Space Invaders
is a vertical shooter with the goal
of defeating slowly approaching waves of alien space-
ships. These waves move from one side to the other
before moving down a single step. The controls are
very simple, consisting only of moving left or right and
shooting. In the early stages of the game three shields
can be used as protection against the shots emitted by
the grid of enemies. If the player is hit three times or
an enemy reaches the bottom of the screen the game
is over. Occasionally, a ’mothership’ appears at the
top of the screen. Defeating it gives a significant point
bonus.
Bowling
is an extremely simple video game version
of the popular sport. The game is divided into position-
ing, essentially moving your character up and down
to align with your target, and ball guiding, where you
influence the balls curve on its way down the lane.
This influence defines the curve of the balls trajectory.
Other than that, the standard rules of bowling apply.
Private Eye
is an adventure game that revolves
around finding items and returning them to a specific
location on the map. The paths are filled with obsta-
cles like potholes, animals and villains. In addition,
there is a time limit of three minutes to collect and
return all items. Movement is restricted to left, right
and occasional up commands as well as jumping.
The three games represent different types of arcade
games so that we can examine the feasibility of our
approach for these different types. For a more detailed
discussion on why each game was chosen we refer to
Section 5.2.2. Screenshots of each of the three games
can be found in Figure 1.
3 RELATED WORK
We discuss related work with regard to agent design
and feature learning.
3.1 Agents
A wide range of agents have been written for ALE with
varying success. The most prevalent type are learning-
based. Among the most advanced are Hausknecht’s
HyperNEAT agent (Hausknecht et al., 2012) and
Mnih’s deep learning approach (Mnih et al., 2013).
Nair’s massively parallel implementation of Mnih’s ap-
proach (Nair et al., 2015) is likely the most successful
learning-based agent to date. It achieves superhuman
scores in most games.
The most consistent performance however is deliv-
ered by Lipovetzky’s planning-based agents (Lipovet-
zky et al., 2015). While there are comparably few
planners targeted at ALE, Lipovetzky’s iterated width
(IW) and two-queue best-first search (2BFS) beat their
learning-based rivals in most games.
This result is likely due to the fact, that action and
reward are temporally divided in most games. While
planning manages to solve this problem for small gaps,
it still performs horribly in adventure games like Mon-
tezumas Revenge and Private Eye, where rewards are
offset by several seconds. A discussion of why deep
learning does not work well in these games can be
found in (Mnih et al., 2015).
3.2 Feature Learning
Feature learning describes the idea of distributing a
classification task among several classifiers that are
organized in a hierarchical structure. Each classifier is
trained to recognize a specific feature.
While the field of feature learning is still young,
there are already encouraging results. For one, Coates
(Coates and Ng, 2012) achieved some of the highest
current scores on the CIFAR-10 dataset with a k-means
feature learning structure. A broader comparison of
different methods can be found in the results of a fea-
ture learning competition created by Google (Sculley
et al., 2011). The challenge revolved around learning
at most 100 features from 5.000 labeled examples of
malicious URLs that could then be used for supervised
prediction. While a lot of methods achieved results
that essentially solved the problem, the pack was led
by three different structures of random trees.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
230
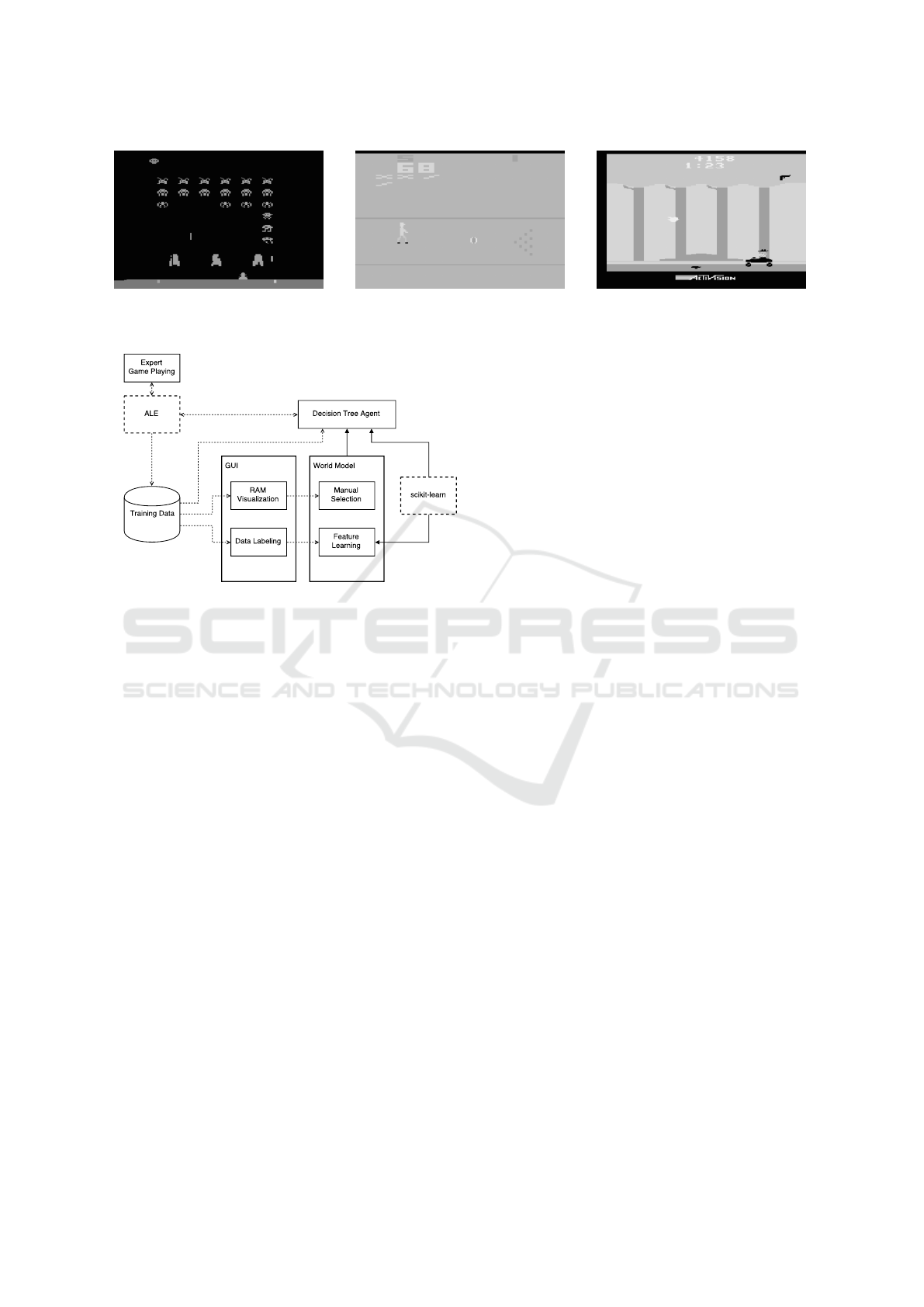
(a) Space Invaders (b) Bowling (c) Private Eye
Figure 1: Screenshots from three games available in the Arcade Learning Environment.
Figure 2: Structural overview of the approach. Dashed
lines represent data flow, solid ones express a component
relationship.
4 APPROACH
As mentioned in the introduction, the main focus of
this work is to involve human experts in producing rele-
vant data for agent development. This section outlines
our approach to this challenge.
4.1 Overview
The general idea is to use a human expert with knowl-
edge of a given game to create training data and an
appropriate world model of the game. We then create
a game playing agent based on this information. A
visual overview of the approach is given in Figure 2.
Before any analysis can occur, we need to
collect
game data
. These usually consist of RAM states,
screen images and the corresponding inputs of the
player. In a fully automated setup, this could be
achieved by using another agent, or even just randomly
choosing actions. There are however two important
benefits to using a human expert. First, we can ensure
a much more efficient exploration of the game at hand.
Situations that never occur unless the player fulfills
specific requirements are abundant. Some of these re-
quire significant skill that an automatic approach might
not provide. Second, the expert can intentionally cre-
ate training data that is relevant in fewer time. While
playing the game normally should, in theory, provide
all necessary data, it can be hard to find sufficient
quantities of specific situations.
Once we have collected enough relevant data, we
can begin the process of
feature selection
. We do this
through means of manual selection and machine learn-
ing. It should be noted, that our approach is entirely
based on RAM data. While image data could be in-
cluded, we are exploring the notion, that all relevant
data is contained in the RAM.
For the
manual analysis
, the expert chooses a few
states that share a feature value, like the number of
enemies on screen. This selection is done based on the
corresponding game images. The toolkit then indicates
the RAM sections that change the least among the
chosen states, leaving out unremarkable consistencies.
The idea behind this method is to highlight sections
that likely encode the feature we are looking for.
Because only basic features of a game can be easily
identified in the RAM, we also implement the more
general approach of
feature learning
. Instead of read-
ing values directly from the RAM, we train classifiers
with supervised learning to create high-level features.
In this case, the expert simply selects suitable example
states by looking at the corresponding images and then
labels them by hand.
The last step of our workflow is
autonomous play
.
The agent design is intentionally kept simple. To fo-
cus on feature quality and the advantages of a precise
world model, we use a decision tree agent. Observ-
ing an agent play can help in finding problems of the
underlying world model.
4.2 Assisted RAM Analysis
Because it would not be feasible to extract RAM por-
tions that correspond to specific features by simply
looking at the raw data, we implement methods to
highlight likely byte candidates. This section describes
these methods and gives a brief introduction into the
Assisted Feature Engineering and Feature Learning to Build Knowledge-based Agents for Arcade Games
231
related parts of our toolkit interface.
4.2.1 Visualizing Relevance
The central aspect of assisting the manual selection is
visualization. In a first step, this means displaying the
RAM data in a pattern oriented fashion. Comparing
sets with 128 byte values each is quite demanding
and quickly becomes confusing. To work around this
limitation, we display these values as bits in a 32 by 32
black and white grid. As a result, an expert can simply
regard them as patterns.
But we can do more. By selecting RAM states that
share a given feature value, say the player stays at the
same spot, we can introduce some statistical assistance.
Since the states share a value, we want to highlight the
RAM sections that are the same in all of them.
rel
p
(S) =
∑
s∈S
v
p,s
|S|
(1)
Equation 1 does this by applying a bitwise calcula-
tion of the mean across the selected states given as set
S
. The bit position is indicated by
p
, so that
rel
p
is the
relevance of the bit at position
p
and
v
p,s
is the value
of the bit in state s at position p.
We also find, that most of the RAM very rarely
changes throughout the entire game. Most states that
are highlighted are not uniquely consistent among the
selected states, but are consistent across all recorded
data. To counter this effect, we modify our approach
to remove all unremarkable similarities.
f
rel
p
(S) = max(0, rel
p
(S) − rel
p
(R)) (2)
Equation 2 removes states that rarely ever change
by simply subtracting the relevance across all recorded
states, given as set
R
, from the relevance across the
selected states. To preserve the property, that
f
rel
p
∈
[0, 1]
, we also cut off all negative results. These nega-
tive values indicate that a bit is less consistent in the
selected set. This is of no particular interest to us and
breaks the possibility of using the result as a simple
scalar later on.
Using this measure of relevance we can shade the
grid to better reflect how important specific parts of
the pattern seem to be. An example application can be
seen in Figure 3. It should be noted, that the relevance
rating is slightly modified by applying an exponent to
increase visual distinction.
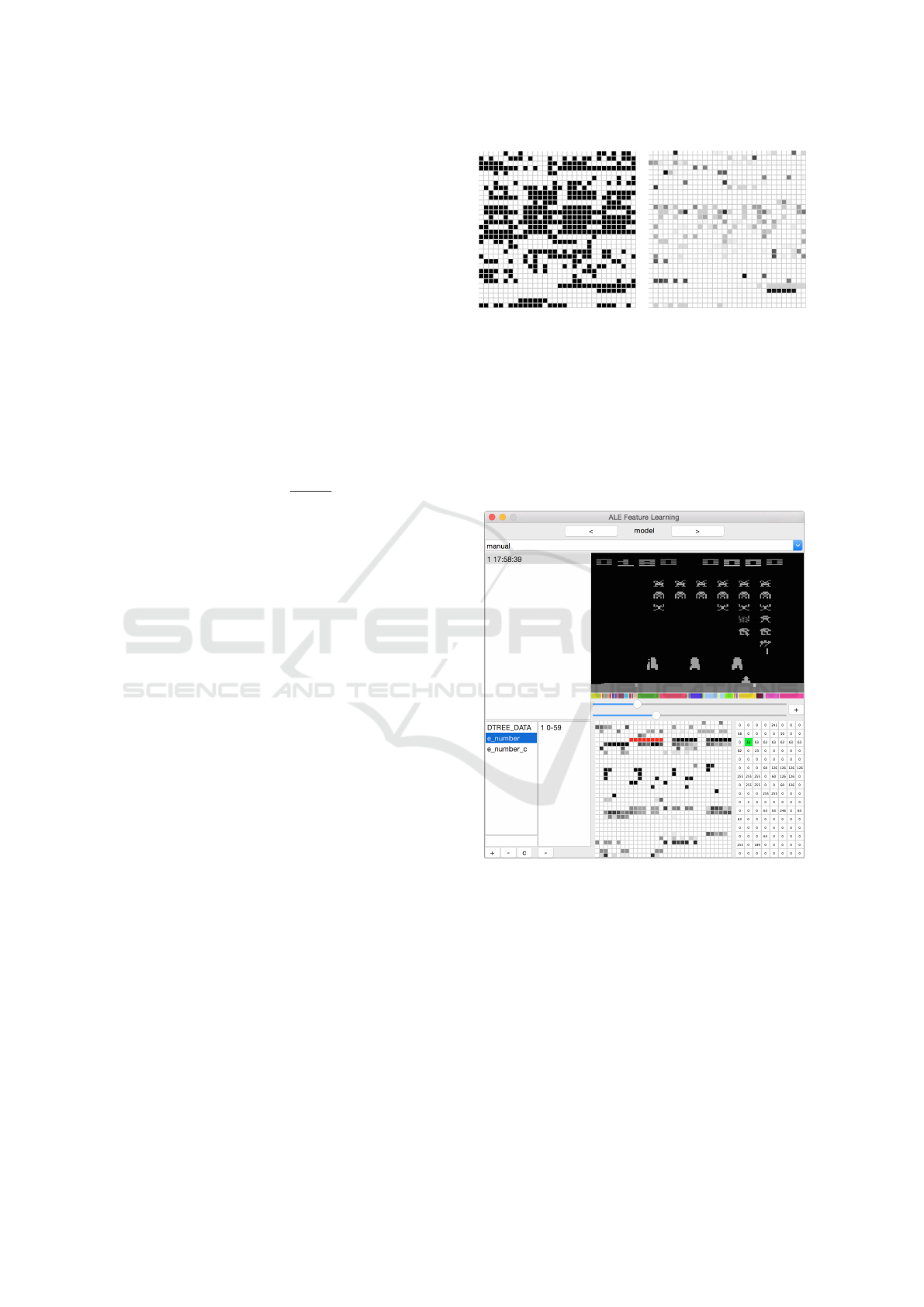
4.2.2 Sample Procedure
To give an impression of the manual feature engineer-
ing, let us consider the game Space Invaders. One of
Figure 3: Raw and shaded RAM data as 32 by 32 grid.
the descriptive attributes that the domain expert might
identify is the number of enemies. An expert user
can create a container for this attribute and associate
recorded game data with certain values of that attribute.
The interface to record data and label them is shown
in Figure 4. The image shows selecting a candidate
for a RAM portion encoding the number of enemies
(modelled as ’e_number’).
Figure 4: Visualization a candidate region in the RAM for
the container ’e_number’. The colors below the game-screen
indicate the changing value. The green mark in the lower
right window indicates the corresponding numeric value of
the RAM region.
By browsing through the different sets of frames
with the same value, the user might spot similarities
in the RAM. This allows for identifying the portions
of RAM encoding a particular feature. The mapping
of state of a region in the RAM and the value of an
attribute can then be used a feature.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
232

4.3 Feature Learning
In this section, we will present and discuss our choices
of feature classifiers and demonstrate how the toolkit
can be used to efficiently construct world models with
feature learning.
4.3.1 Methods
To be effective, classifiers do not only have to be pre-
cise, but also fast, since the games are being played
in real-time. We decided to use the following three
classifiers to cover a spectrum of possible advantages.
Random trees
perform well with the inclusion of
irrelevant features. Every decision tree gets a random
subset of features as its input. Features that are good
indicators will dominate the decision process in almost
any tree they are included in. Trees that lack these
features should create predictions that are essentially
randomly distributed. As a result, the ensuing majority
vote is heavily influenced by relevant features. This
property is very desirable in our application, since the
systems RAM is likely to only include a few features
that are truly decent indicators.
Support vector machines
deal very well with high-
dimensional data. This property can be observed
in some upper bounds of the classification error for
SVMs. Equation 3 shows one such upper bound, dis-
cussed by Vapnik (Vapnik and Chapelle, 2000).
E p
l−1
error
≤ E(
SD
lρ
2
) (3)
Here,
S
denotes the span of all support vectors (the
intersection of all sub-spaces containing the set of
support vectors),
D
is the diameter of the smallest
sphere containing all training points,
ρ
is the margin
and
l
is the size of the training set. Most importantly,
the upper bound is independent of the dimensionality
of the problem. To us, this property could matter, since
we are dealing with 128-dimensional data if we take
the full RAM content as our input.
Nearest neighbor classifiers
are suitable for prob-
lems that have arbitrarily irregular decision boundaries.
Instead of calculating an explicit model, they simply
vote on an input’s class among a few of the nearest ex-
isting data points. We use this method as an indicator
of how well explicit models can be formed, since we
have little information about the decision boundaries.
If the typically subpar nearest neighbor classifier sur-
passes the more advanced methods, there are likely to
be problems that relate to the underlying models.
Figure 5: Feature learning procedure example: Visualizing
classification results by a random forest on test data.
Our selection of the three classifiers described
above is also supported by a comparative study in
(Fernández-Delgado et al., 2014). Fernandez-Delgado
tested 179 classifiers on 121 datasets and found ran-
dom trees to be the overall best, closely followed by
support vector machines.
4.3.2 Sample Procedure
Similarly to the manual feature construction we also
give a brief example of feature learning. Just like
before, we can create a container for an attribute and
label game situations with a value. In our example, let
us consider the Space Invaders game again. This time,
we are interested in whether our agent is protected by
a shield. After collecting a set of training data, we can
select a learning method and preview the performance
of the same.
Figure 5 shows a situation in feature learning for
the ’protected’ attribute. The user can slide through
different frames and check whether or not the classi-
fication is correct. The green and red areas in the bar
below the game-screen indicate value false and true
for ’protected’, respectively.
4.4 Agent Design
We use a hierarchical structure to construct our agent.
In this structure, classifiers identify individual features,
which are then routed into higher-level classifiers. We
first model a game world and then learn to play based
on the resulting features. Figure 6 illustrates the hi-
erarchy with the features used for the game Bowling.
The left side utilizes manually selected features (see
Section 4.2), while the right side uses feature learning
to identify the features classes.
Assisted Feature Engineering and Feature Learning to Build Knowledge-based Agents for Arcade Games
233
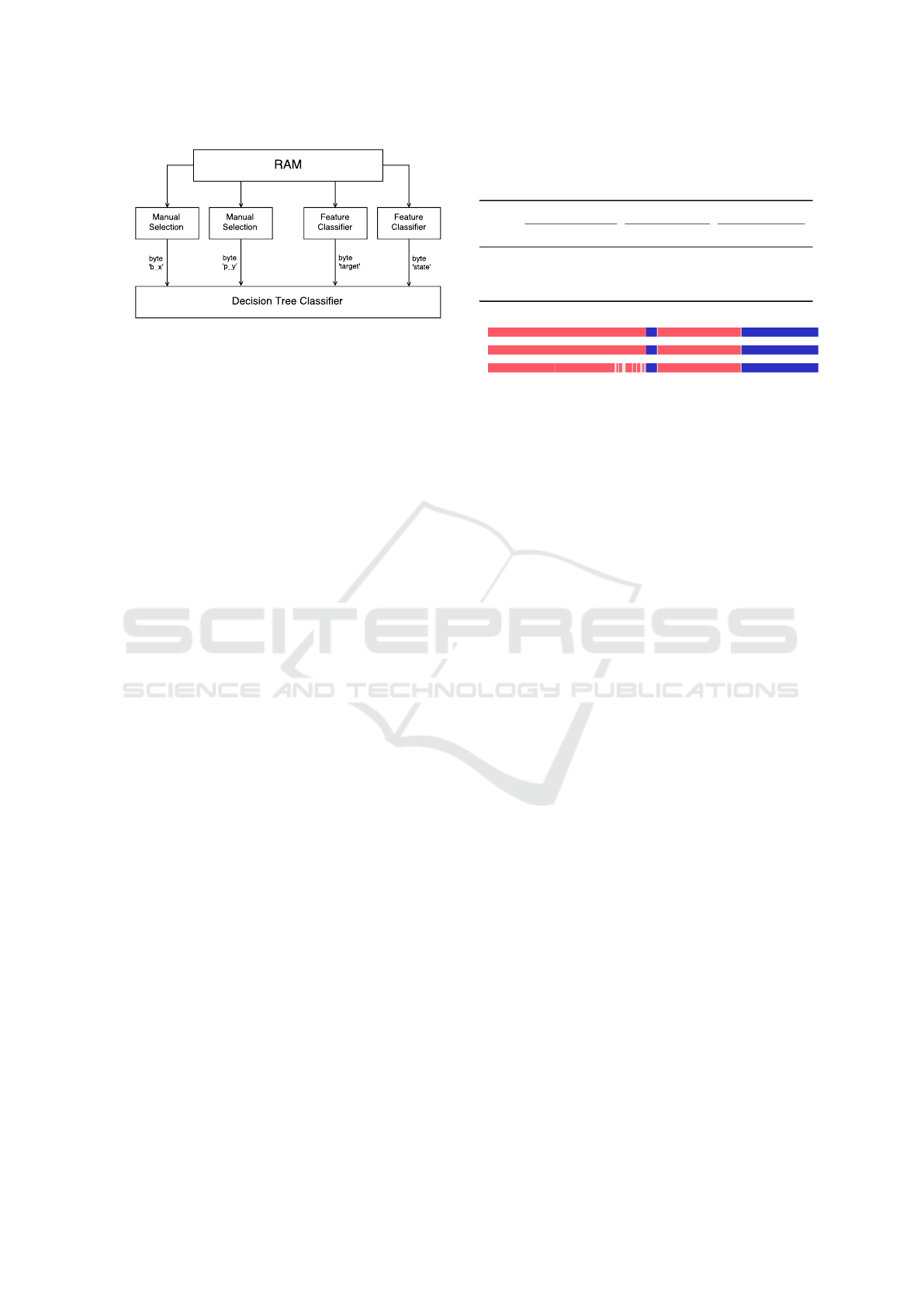
Figure 6: Bowling agent with feature learning structure. The
classifiers feature vector includes both manually selected
and learned features.
It is, of course, possible to create more classifica-
tion layers, but because we were able to achieve very
good results with a comparably flat structure there was
no need for a more complex hierarchy.
4.4.1 Different Feature Sets
In order to measure the effects of an improved world
model, we need to create an agent that uses it. In our
case, we have a clear focus on the quality of features
and therefore need an agent that is simple and transpar-
ent. Decision trees fit perfectly, because their structure
can quickly be analyzed and carries obvious meaning,
since each node corresponds to a specific feature.
Our baseline agents use the entire RAM as their in-
put. The raw data is simply formatted into byte chunks
and then routed into the decision tree classifier. Agents
based on manual selection reduce this full byte array to
only a few previously marked sections before routing
the input into the decision tree classifier. For the fea-
ture learning approach, we apply the previously trained
feature classifiers to the entire RAM, outputting a sin-
gle byte that corresponds to the predicted class. This
byte is then added to the feature vector of manually
selected bytes.
5 EVALUATION
The evaluation comprises two main points. The first
point is assessing the performance of the feature learn-
ing in ALE. We compare their scores and behavior
across several features in all tested games. The sec-
ond point is assessing the game playing performance
achieved by our approach. This includes comparisons
to both simple and state-of-the-art methods.
5.1 Learning Methods
In this section we compare the results of three classi-
fiers in the context of ALE feature learning. We also
Table 2: Feature learning results based on their
F
1
score.
’dnf’ marks training processes that did not finish. Random
trees delivers the best results across all features.
Space Invaders Bowling Private Eye
shot bottom target state object clue
RT 0.968 0.997 1.000 0.968 1.000 0.998
SVM dnf 0.993 1.000 0.963 0.999 0.991
NN 0.910 0.946 1.000 0.959 0.983 0.980
Figure 7: Visual comparison of classification results. The
white lines indicate quickly changing classes. From top to
bottom: random trees, support vector machines, nearest
neighbor.
introduce the methodology that was used in training
and testing these classifiers.
5.1.1 Methodology
To measure the performance of each classifier used
in feature and agent learning, both their precision and
recall are calculated. Since these measures never dif-
fered by more than one percent in our tests, we de-
cided to reduce them to their
F
1
score. The
F
1
score is
the weighted average of precision and recall. Cross-
validation is performed with randomly split training
and test data sets of equal size. A grid search with
a range of hand selected values is used to estimate
appropriate parameters for all classifiers.
Each feature is trained with around 2000 frames of
data and the resulting scores are averages of six runs
for each configuration.
5.1.2 Results
Looking at the feature learning results in Table 2, the
clear winner by scores is the random trees classifier. It
equals or surpasses the alternatives in all tests and de-
livers great results of above 96% precision and recall.
But the scores do not tell the entire picture. In
addition to achieving the highest scores, random trees
are also the fastest to train and the fastest to evalu-
ate. While the differences are usually marginal, they
grow significantly with larger amounts of training data.
Especially support vector machines struggle in this
regard, as too much data causes excessive training
times (the process was stopped after three hours of
continuous computation). Since the scikit-learn imple-
mentation that is used in this paper is based on the very
popular LIBSVM (Chang and Lin, 2011), it is highly
unlikely to be the result of a coding error.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
234

A different problem arises with the nearest neigh-
bor classifier. While the overall scores indicate that
its performance is stellar, the distribution of misclas-
sifications is far more erratic. An example of this can
be seen in Figure 7, where red and blue indicate two
different classes and white represents high-frequency
class changes. While slight errors around the optimal
decision boundaries are likely inconsequential, stray
misclassifications could significantly impact play per-
formance.
5.2 Play Performance
Towards the overall goal of creating knowledge-based
agents, the playing performance is important. In the
following section we introduce the methodology that
was used in testing the performance of our agents. We
then analyze the results for each of the three tested
games.
5.2.1 Methodology
The basis of all agents used in this paper are decision
trees that are trained with data collected by human
experts. In order to get a rough understanding of how
much training data is required to adequately train the
classifier, we ran tests with an increasing number of
training frames. While around 3000 frames deliver
some of the best results, it became quite apparent
that this is due to a sort of beneficial overfitting. The
agent is mimicking the experts example game very
closely. Increasing the number of frames to around
10000 yields worse results, but also shows first signs of
abstraction. The amount we settled on, around 20000
frames, delivers considerably better results, while also
increasing the agents capability of handling new situa-
tions. Beyond that point gains were minimal.
Our underlying learning method differs from the,
usually image-based, reinforcement learning that is
used by most other researchers. This is why we de-
cided to measure three configurations that allow for
a self-contained comparison: The first one simply di-
vides the RAM into 128 bytes and it is referred to
with full ram in the tables below. The second one uses
only manually selected parts of the RAM and it is re-
ferred to with manually. The third one adds learned
features to the manually selected ones and it is referred
to with learned. Because random trees dominate our
classifier comparison, it is the only feature classifier
we use from here on out. In addition to our own ref-
erence values, we include the closely related score of
Bellemare’s RAM approach (Bellemare et al., 2013)
(referred to with bellemare), as well as the highest
score we could find in related papers (referred to with
state-of-the-art).
Table 3: Space Invaders
F
1
and game scores over ten
episodes.
full ram
0.59 0.59 0.61 0.56 0.63 0.61 0.63 0.64 0.61 0.60 0.607
310 260 160 180 445 130 255 70 230 115 215.5
manual selection
0.76 0.75 0.75 0.75 0.74 0.73 0.75 0.75 0.74 0.75 0.747
305 370 275 235 320 185 785 175 295 320 326.5
learned
0.70 0.73 0.74 0.73 0.73 0.72 0.72 0.73 0.72 0.73 0.725
210 555 230 90 510 285 505 315 230 430 336.0
Table 4: Space Invaders game score comparison.
full ram manual learned bellemare state-of-the-art
215.5 326.5 336.0 226.5 3974.0
Each of our own configurations is trained and then
run ten times per game. In addition to the scores re-
ported by ALE, we also include the
F
1
score for each
decision tree. The latter is however not necessarily
related to game performance, since the input data does
not represent perfect play.
5.2.2 Results
We now look at the resulting gameplay performance
for the three games Space Invaders, Bowling, and Pri-
vate Eye introduced earlier. For each game, we include
a short rationale for its inclusion.
Space Invaders
is included in our game selection
because it is a great example of the arcade-style gam-
ing that was dominant on the Atari 2600. It is mainly
reactionary and open ended. There are no compli-
cated objectives and the entire necessary information
is accessible at all times. Manually Selected Features
include the x position of the player, x/y for the enemies
and x/y for two shots, as well as the current number of
enemies. The two learned features recognize danger
from incoming shots and enemies reaching the bottom.
Table 3 shows that there are significant benefits to
manually selecting relevant features. Not only does
the classifier achieve a much higher
F
1
score, but the
play performance also increases by around 50%. The
gains achieved by adding learned features are much
more modest, with only a marginal increase of around
3% in the game score. The observed play style is
however changed. The agent avoids enemies reaching
the bottom more effectively. It thereby manages to
exceed 400 points in four out of ten games, while
manual selection only does so in one.
Assisted Feature Engineering and Feature Learning to Build Knowledge-based Agents for Arcade Games
235
Table 5: Bowling F
1
and game scores over ten episodes.
full ram
0.94 0.93 0.93 0.93 0.94 0.93 0.94 0.93 0.94 0.94 0.935
dnf dnf 111 127 177 102 dnf dnf 99 84 116.7
manual selection
0.87 0.87 0.87 0.87 0.87 0.87 0.87 0.87 0.87 0.87 0.870
80 80 80 80 80 80 80 80 80 80 80.0
learned
0.90 0.90 0.89 0.90 0.89 0.91 0.90 0.90 0.90 0.90 0.899
217 190 217 219 174 218 198 216 219 219 208.7
Table 6: Bowling game score comparison.
full ram manual learned bellemare state-of-the-art
116.7 80.0 208.7 29.3 69.0
As can be seen in Table 4, our best score exceeds
Bellemare’s approach by around 50%. However, it
falls very short of the current state-of-the-art.
Bowling
stands out among the available games in
ALE. Even though its premise and game mechanics
are incredibly simple, no agent has so far achieved
results that approach even a human layman. It is there-
fore interesting to see if human involvement in the
modeling and training stages of an agent can remedy
the underlying issues. The manual features that were
easily identified in the RAM are the ball’s x and the
player’s y position. Notably, the remaining pins proved
too hard to isolate and were therefore not manually
selected. To compensate, the learned features include
the current target alongside a state feature to identify
waiting periods.
The advantages of collecting training samples with
an expert are immediately visible in Bowling. The
full RAM approach beats Bellemare’s control value by
300% and even outclasses the state-of-the art approach,
IW(1) by Lipovetsky, by around 70%. However, the
agent tends to get stuck waiting and fails to finish the
game four out of ten times. The sparse manual selec-
tion fails to improve upon the full RAM input. Both
the
F
1
and the game score drop significantly. Adding
learned features makes a world of difference. The
additional context awareness prevents waiting loops
and being able to identify the current target allows the
agent to play a near perfect games. While most throws
result in strikes, even the occasional spare is handled
gracefully. All of this results in scores that trump the
current best by more than 200%.
Looking at the comparison scores in Table 6, it is
unclear why an extremely simple game like Bowling
proves too hard for even the best planning algorithms.
One possible explanation might be the significant delay
between input and scoring that results from the ball
Table 7: Private Eye F
1
and game scores over ten episodes.
full ram
0.93 0.93 0.93 0.92 0.92 0.92 0.92 0.93 0.92 0.92 0.924
-882 26113 3377 26183 3463 3536 -1000 4071 -342 13738 7825.7
manual selection
0.89 0.90 0.89 0.90 0.89 0.89 0.88 0.89 0.89 0.90 0.892
26352 49761 -1000 18692 10647 25449 25868 3300 -1000 4532 16260.1
learned
0.85 0.85 0.85 0.85 0.85 0.85 0.85 0.85 0.85 0.85 0.850
96960 96356 96456 96456 96156 96056 96556 96456 96556 95760 96376.8
Table 8: Private Eye game score comparison.
full ram manual learned bellemare state-of-the-art
7825.7 16260.1 96376.8 111.9 2544.0
traveling down the lane.
Private Eye
is easily the most ambitious of the
selected games. Its large world is only partially ob-
servable at any given time and solving the changing
objectives requires many steps. Unsurprisingly, even
the best agents fail to achieve any notable progress.
Through our custom process of manual feature selec-
tion, we are able to isolate the player’s x position, the
current screen number and the id of the currently held
item, as well as the current time. The first, and most
important, learned feature is the current ’objective’. It
encodes the target destination as a number from one to
seven. The second learned feature indicates whether
the current room still contains a ’clue’.
Table 7 shows a significantly increased score due
to using expert training data. The initial score on the
entire RAM is 70 times as high as the comparison
value from Bellemare. It still even triples the current
state-of-the-art, 2BFS by Lipovetsky.
Manual selection doubles the score of our own full
RAM approach, but still manages to get lost on the
way. This is shown by the low -1000 scores in two of
the ten runs. In these instances, the agent gets stuck in
a dead end and is eventually terminated by the running
clock. The ’objective’ feature solves this problem,
with all runs resulting in a score of above 95000, or 37
times the current state-of-the-art (see Table 8). This
score is also very close to the theoretical maximum of
101600 and includes finding and returning all items.
Where Bowling has a somewhat noticeable delay
between action and reward, Private Eye separates these
events by seconds or even minutes. It is therefore
no surprise, that planning-based approaches fail to
achieve high marks. The same applies to reinforce-
ment learning, as the sparse rewards provide little guid-
ance as to what constitutes a beneficial action. An ex-
pert’s domain knowledge solves these problems very
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
236
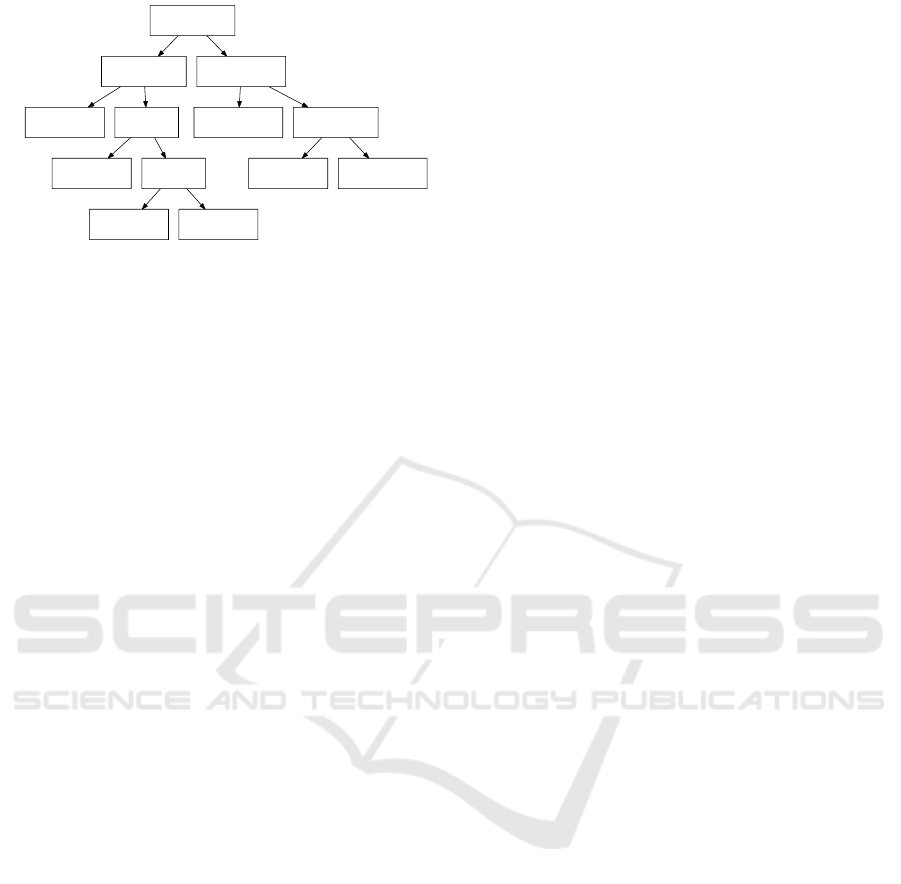
Figure 8: Simple Bowling agent. The structure automates
bowling a strike.
efficiently and allows for scores at a human level.
5.3 Further Investigation
In this section we discuss some additional work that
does not fit within the main evaluation of the paper.
These are mainly extensions of our approaches and
could serve as starting points for future work.
5.3.1 Clustering
In addition to supervised feature learning we tested an
unsupervised approach based on a few popular clus-
tering methods (namely k-means, mean shift and DB-
SCAN). We did this to explore whether it would be
possible to fully automate constructing world models
within our toolkit. However, during our limited tests
we were not able to create meaningful features through
this process. Visualizing the results, we found, that
clustering tends to create equally sized classes that are
defined by the temporal proximity of their members.
Because unsupervised feature learning was not a
core goal of this paper, we decided to stop our inves-
tigation at this point. Future research might focus on
advancing these preliminary tests by isolating notable
RAM sections.
5.3.2 Simplified Agents
One overarching idea behind this paper is to create
agents that require less computational resources by
leveraging additional domain knowledge. We tried
to push the boundaries of expert involvement within
our toolkit by selecting specific moments of perfect
play to create a minimal agent. The ideal candidate for
this approach is Bowling, because a ’strike’ is always
the best possible outcome and examples can easily be
identified. Other games, such as Space Invaders are a
lot more complicated, making it virtually impossible
to choose perfect examples.
Choosing only one example sequence of a perfect
throw created the decision tree shown in Figure 8. The
only two features that are used are the player’s x and
the ball’s y position. To give a point of comparison, the
full RAM agents in our main evaluation of Bowling
have around 300 nodes, while this simplified version
only has 13. In addition, the score is much improved.
The decision tree in Figure 8 achieves a score of 230,
surpassing even our previous best agents with a near-
perfect game.
While these results are interesting, they should be
treated carefully. This reduced agent is essentially
just a ’strike’ automation. It can only deal with ideal
conditions and has no capability of identifying and
managing varying situations. Nevertheless, it is inter-
esting to see, that a little additional domain knowledge
can create an extremely simple agent that performs
nearly perfectly.
6 CONCLUSION
In this paper we presented a toolkit for assisting de-
velopers of knowledge-based agents with feature en-
gineering and feature learning. Our application do-
main are arcade games where we took three exemplary
games from the Arcade Learning Environment. We
provide assistance in creating features by two mean.
For one, we assist in manually creating features by
helping to identify relevant portions of the RAM. For
another, we offer means to learn features from domain
expert knowledge. We then also help to create sim-
ple agents for the games using the developed features.
In our evaluation, we first compare different learning
techniques for the feature learning. Then we assess the
game playing performance of different agents using
different (sub)sets of features available. We show that
while the knowledge-based approach cannot keep up
with state-of-the-art approaches using deep learning
in rather reactive kind of games it can clearly outper-
form those methods in games that have a large delay
between actions and their final effect.
In our research we found that there are significant
gains in all tested games when preselecting features.
Comparing the naive full RAM approach to a carefully
crafted world model with everything else being equal,
we saw scores increase by anywhere from 50% to
1100%. While these scores even surpass state-of-the-
art methods in two out of three games, the effect cannot
be entirely attributed to world modeling. The high-
quality training data recorded by an expert is clearly
also a notable factor, as even the naïve approach of-
ten outclasses the current best methods. Judging from
the results, our toolkit can quickly create world mod-
Assisted Feature Engineering and Feature Learning to Build Knowledge-based Agents for Arcade Games
237

els that meaningfully impact the overall game score.
While it lacks the generality of game independent ap-
proaches, it shows that minimal expert involvement
can enable even simple game playing agents to per-
form very well.
Because in this paper we focused on the feature
extraction, we investigated the benefits on a limited
set of agents only. Future work might revolve around
applying our findings to a broader range of agents
and games. Another interesting addition could be to
further automate the manual feature selection. The
methods presented in this paper often reduce the pos-
sible byte candidates to just a handful and it might be
feasible to reduce the number even more. If nothing
else, this work should demonstrate that feature quality
can have a very meaningful impact in ALE. Taking
this into account, it would be interesting to investigate
how fully automatic dimensionality reduction methods
can influence game playing performance for different
agents.
Overall, we have shown that enabling descriptive
features to build knowledge-based agents is a very
promising route. It yields agents that are not only
comprehensible but that are also able to outperform
state-of-the-art solutions in difficult situations.
REFERENCES
Bellemare, M. G., Naddaf, Y., Veness, J., and Bowling, M.
(2013). The arcade learning environment: An evalua-
tion platform for general agents. Journal of Artificial
Intelligence Research, 47:253–279.
Bishop, C. M. (2006). Pattern recognition and machine
learning. Springer.
Boser, B. E., Guyon, I. M., and Vapnik, V. N. (1992). A
training algorithm for optimal margin classifiers. In
Proceedings of the fifth annual workshop on Computa-
tional learning theory, pages 144–152. ACM.
Breiman, L. (2001). Random forests. Machine learning,
45(1):5–32.
Chang, C.-C. and Lin, C.-J. (2011). Libsvm: A library
for support vector machines. ACM Trans. Intell. Syst.
Technol., 2(3):27:1–27:27.
Coates, A. and Ng, A. Y. (2012). Learning feature represen-
tations with k-means. In Neural Networks: Tricks of
the Trade, pages 561–580. Springer.
Fernández-Delgado, M., Cernadas, E., Barro, S., and
Amorim, D. (2014). Do we need hundreds of clas-
sifiers to solve real world classification problems? The
Journal of Machine Learning Research, 15(1):3133–
3181.
Fix, E. and Hodges Jr, J. L. (1951). Discriminatory analysis-
nonparametric discrimination: consistency properties.
Technical report, DTIC Document.
Friedman, J., Hastie, T., and Tibshirani, R. (2001). The
elements of statistical learning, volume 1. Springer
series in statistics Springer, Berlin.
Hausknecht, M., Khandelwal, P., Miikkulainen, R., and
Stone, P. (2012). Hyperneat-ggp: A hyperneat-based
atari general game player. In Proceedings of the four-
teenth international conference on Genetic and evolu-
tionary computation conference, pages 217–224.
Ho, T. K. (1998). The random subspace method for construct-
ing decision forests. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 20(8):832–844.
Lipovetzky, N., Ramirez, M., and Geffner, H. (2015). Classi-
cal planning with simulators: Results on the atari video
games. Proc. IJCAI 2015.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M. (2013).
Playing atari with deep reinforcement learning. NIPS
Deep Learning Workshop 2013.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller, M.,
Fidjeland, A. K., Ostrovski, G., Petersen, S., Beat-
tie, C., Sadik, A., Antonoglou, I., King, H., Kumaran,
D., Wierstra, D., Legg, S., and Hassabis, D. (2015).
Human-level control through deep reinforcement learn-
ing. Nature, 518(7540):529–533.
Naddaf, Y. (2010). Game-independent ai agents for playing
atari 2600 console games. University of Alberta.
Nair, A., Srinivasan, P., and Blackwell, S. (2015). Mas-
sively parallel methods for deep reinforcement learn-
ing. arXiv preprint arXiv:1507.04296.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer, P.,
Weiss, R., Dubourg, V., et al. (2011). Scikit-learn:
Machine learning in python. The Journal of Machine
Learning Research, 12:2825–2830.
Sculley, D. et al. (2011). Results from a semi-supervised
feature learning competition. NIPS 2011 Workshop on
Deep Learning and Unsupervised Feature Learning.
Vapnik, V. and Chapelle, O. (2000). Bounds on error expecta-
tion for support vector machines. Neural computation,
12(9):2013–2036.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
238
