
WAVE: A 3D Online Previewing Framework for Big Data Archives
Nicholas Tan Jerome, Suren Chilingaryan, Andrei Shkarin, Andreas Kopmann,
Michael Zapf, Alexander Lizin and Till Bergmann
Institute for Data Processing and Electronics (IPE), Karlsruhe Institute of Technology (KIT),
Eggenstein-Leopoldshafen, Germany
Keywords:
Web-based Visualization, Scientific Visualization, Multi-resolution Slicemap, Visual Data Browsing.
Abstract:
With data sets growing beyond terabytes or even petabytes in scientific experiments, there is a trend of keeping
data at storage facilities and providing remote cloud-based services for analysis. However, accessing these data
sets remotely is cumbersome due to additional network latency and incomplete metadata description. To ease
data browsing on remote data archives, our WAVE framework applies an intelligent cache management to
provide scientists with a visual feedback on the large data set interactively. In this paper, we present methods
to reduce the data set size while preserving visual quality. Our framework supports volume rendering and
surface rendering for data inspection and analysis. Furthermore, we enable a zoom-on-demand approach,
where a selected volumetric region is reloaded with higher details. Finally, we evaluated the WAVE framework
using a data set from the entomology science research.
1 INTRODUCTION
As part of scientific discovery process, the rate of data
generation in science has increased dramatically (Sza-
lay and Gray, 2006). Taking an entomology experi-
ment from the ANKA synchrotron facility as an ex-
ample (Ressmann et al., 2014), each sample scanned
at the beamline station yields a data size ranging from
32 GB to 150 GB. There are thousands of data sets
produced monthly resulting in terabytes and perhaps
petabytes of data.
To handle such a large amount of data, a new trend
in data management policy arises, where experiment
data are kept at the facility while providing cloud-
based services for external analysis. Initially, data are
stored at the data processing server during experiment
phase. But when these data are no longer in active
use, they are moved to a long-term archive for better
data retention, e.g. magnetic tapes or optical disks.
However, accessing these archived data remotely in-
troduces additional latency. If scientists wish to re-
trieve these data sets, they often refer to the associ-
ated metadata. There is no guarantee that the meta-
data fully describes the data set and scientists might
end up in a wild-goose chase. Instead, it is attrac-
tive to receive a visual preview on the archived data
along with its metadata. Here, the visual preview can
be a reduced-size version of the large data set, used
to help in recognizing and organizing them. Ma dis-
cusses a similar approach by realizing an in-situ vi-
sualization in which snapshot images are generated
alongside with data generation (Ma, 2009).
Our goal is to provide visual previews of large data
for easier data browsing. These previews are served
interactively, with the capability of delivering high
quality visualization in consonance with the user re-
quirement.
In this paper we present a framework that pro-
duces large data previews for a broad range of client
hardware, covering devices from mobile phones up
to powerful desktops. Our framework, WAVE
1
, pro-
vides an adaptive solution that tunes the visual qual-
ity according to available client resources, network
bandwidths, and user demands. In particular, we bal-
ance the processing loads at offline data preprocessing
(batch jobs), online server data preparation, and client
visualization.
We address interactive scalability for data brows-
ing and data analysis for a broad range of client hard-
ware. Due to the diversity of client hardware re-
quirements, the size of the supporting data also dif-
fers accordingly. In response, we use multi-resolution
slicemap, exchanged between the server and the
client, as our main data object (Congote et al., 2011).
The slicemap is a 3D data structure in the form of
a mosaic-format image, which is composed from a
series of cross-section images. Rather than gener-
ating each slicemap intended for the final display,
we precompute a whole hierachy of mutiresolution
1
The name WAVE stands for Web-based Analysis of
Volumetric Extraction.
152
Tan Jerome N., Chilingaryan S., Shkarin A., Kopmann A., Zapf M., Lizin A. and Bergmann T.
WAVE: A 3D Online Previewing Framework for Big Data Archives.
DOI: 10.5220/0006228101520163
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 152-163
ISBN: 978-989-758-228-8
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: A biological screw found in a bettle’s leg (van de Kamp et al., 2011) rendered by the WAVE client user interface
using the surface rendering method.
slicemaps as caches instead. In order to achieve an
optimal visual quality with reasonable performance,
our framework selects the cache with a suitable level-
of-detail (LOD) by evaluating the visual resolution
and the performance of the client graphical device.
Moreover, the simplicity of the slicemap allows us to
optimize processing tasks between the server and the
client by minimizing data transfers and server loads
for better scalability. The server loads are further al-
leviated as we prepare the reduced data set in advance
using low-priority batch jobs and cache the data either
temporarily or permanently according to the configu-
ration of the system.
By utilizing both the client and the server re-
sources, the WAVE framework is able to produce an
interactive 3D preview on most client devices with-
out being restricted neither by the data size nor by
the data latency. Our framework supports zoom-on-
demand approach, which reloads the user selected re-
gion using caches with a high level-of-detail. Fur-
ther in this paper, we evaluate our framework using
a data set from the entomology science experiment.
Our framework is open source, and it is generally ap-
plicable to other science domains where an interactive
3D web-based data previewer is required.
2 RELATED WORK
In this section, we present relevant works in large data
processing that helps in visual data browsing. Two
viable approaches to realize our goal are in-situ vi-
sualization and multi-resolution techniques (Childs,
2007).
2.1 in situ Visualization
Rivi et. al. described three different approaches in
in-situ visualization: they are tightly coupled, loosely
coupled, and hybrid approaches. These approaches
are still widely used in many High Performance Clus-
ter (HPC) facilities. There is no single universal tech-
nique for in-situ visualization as each approach can be
beneficial in each different use case (Rivi et al., 2012).
The tightly coupled approach does not require
data movement, with visualization and computation
running on the same nodes or machine. Numer-
ous applications using this approach can be seen in
SciRun (Johnson et al., 1999), Hercule (Tu et al.,
2006), ADIOS and CoDS (Zhang et al., 2012), and
YT package (Turk et al., 2010). However, this
approach requires large investments in visualization
equipments and knowledge in the simulation code.
The loosely coupled approach on the other hand
has separate set of resources involving data move-
ment over the network. For example, data process-
ing is done on the server while images are streamed
to the client. This approach offers flexibility but at
the expense of being restricted by the network band-
width. Applications using such approach can be seen
in Strawman (Larsen et al., 2015), Image-based ap-
proach (Ahrens et al., 2014), Catalyst (Lorendeau
et al., 2013), PreDatA and ADIOS (Malakar et al.,
2010), and EPSN (Esnard et al., 2006).
The hybrid approach is the most similar to the
WAVE framework, in which data is reduced in a
tightly coupled setting and later sent to a concurrent
resource for further post processing. This approach
inherits advantages from the tightly coupled and the
loosely coupled approaches, and at the same time
WAVE: A 3D Online Previewing Framework for Big Data Archives
153
minimizes their drawbacks, e.g. ParaViewWeb (Rivi
et al., 2012), X3DOM (Behr et al., 2009). Here,
web browser can be used as the client resource to
render the data. Due to the advancement in web
technologies that exploits the power of GPU through
WebGL (Khronos, 2011), data can be processed in
parallel even on a less powerful mobile device. Con-
gote et al. presented an early work on web-based vol-
ume visualization using the GPU-based ray marching
approach in WebGL (Congote et al., 2011), which
proved to be an interesting option. Being inspired
by their work, traits of their work can be seen in our
framework, especially the usage of the slicemap as
our main data object.
2.2 Multi-resolution Techniques
Isenberg et. al. presented an analysis regarding re-
cent visualization techniques and categorized multi-
resolution techniques, view-dependent visualization,
and level of detail under the main category abstrac-
tion, simplication, approximation (Isenberg et al.,
2017). These subsets of techniques complement each
other to achieve an efficient rendering at an interactive
rates. Although multi-resolution techniques had been
presented early back in 1983 by Williams (Williams,
1983), such approach is still valid, as the system bot-
tleneck continues to remain at the network bandwidth.
In this section, we discuss on applications that uti-
lized these techniques. Burigat and Chittaro studied
the feasibility of overview-and-demand visualization
on mobile devices (Burigat and Chittaro, 2013). In
their study, they firstly loaded a map with the coarsest
level of detail, and a map with better level of detail
only on a higher zoom level.
Lu et. al. introduced a flexible LOD con-
trol scheme to effectively explore the flow structures
and characteristics on programmable graphics hard-
ware (Lu et al., 2015). In their control scheme, the
output textures were created according to a sparse
noise model, taking the depth distance of a point and
the corresponding brick contribution into considera-
tion.
Kimball et. al. introduced a level of detail algo-
rithm which enables interactive visualization of mas-
sive, unstructured, particle data sets (Kimball et al.,
2013). They created a multi-resolution pyramid of
volume slabs and stacked them into volumes. Each
slabs vary in level of detail and full resolution slabs
are used at the closest view.
Zinsmaier et. al. proposed a technique that allows
straight-line graph drawings to be rendered interac-
tively with adjustable level of detail (Zinsmaier et al.,
2012). They used the density-based node aggrega-
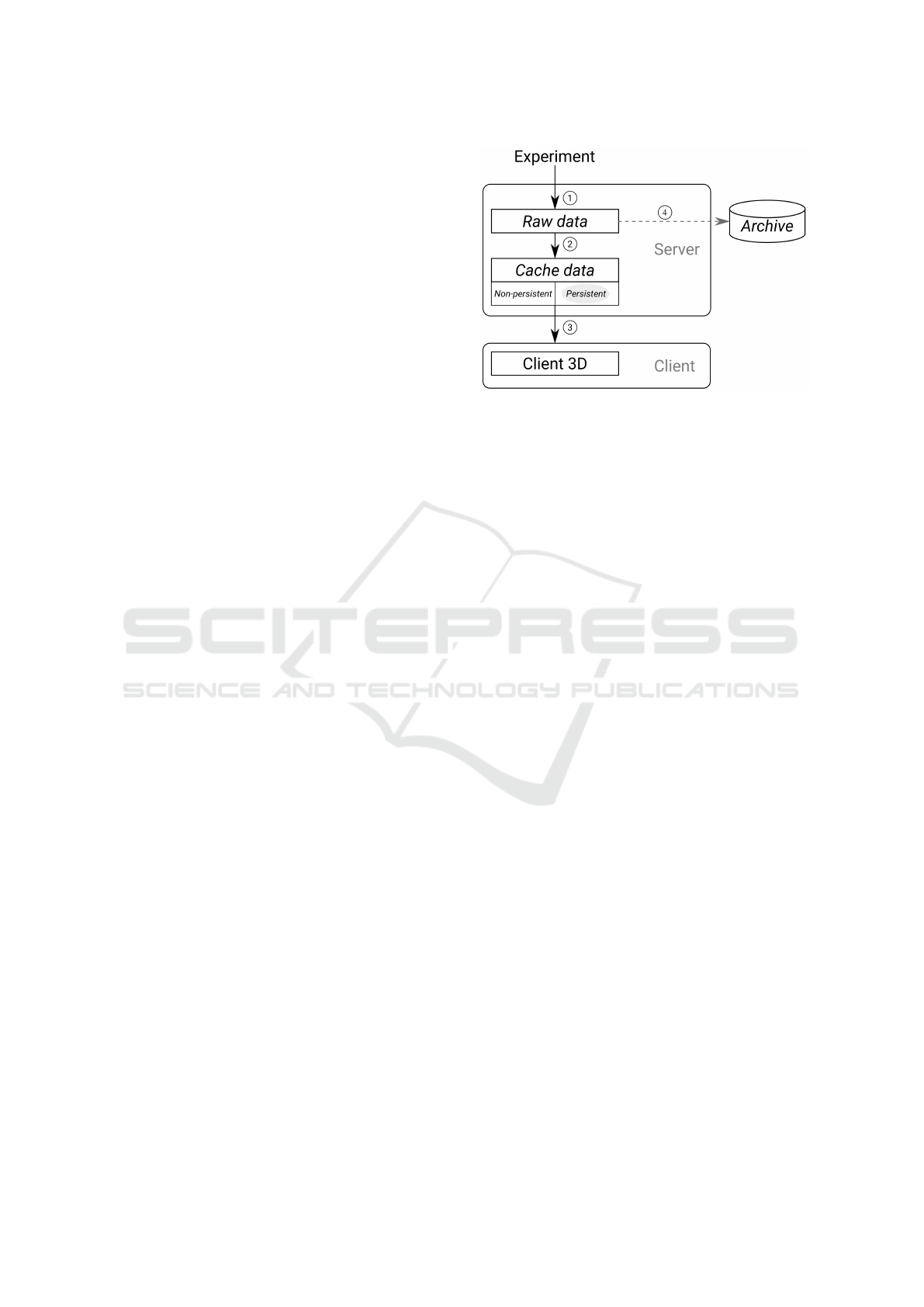
Figure 2: The data flow of the WAVE framework.
tion and the edge aggregation to select visual patterns
at different levels of detail. They were able to show
graphs with up to ∼ 107 nodes and up to ∼ 106 edges
at interactive rates.
All these applications first prepared a series of
LOD data governed by its varying visual detail, e.g.
resolution. A control logic was then applied to select
the best LOD data according to the intended visual-
ization. In the WAVE framework, we also prepare a
hierarchy of multi-resolution slicemaps varying in its
image resolution. A cache selection is put into ac-
tion to select the best slicemap according to the client
hardware.
3 THE WAVE FRAMEWORK
An effective large data previewing framework must
address two main challenges: they are large data
processing and interactive scalability across various
client hardware. The large data can be either pro-
cessed in parallel or reduced in size. We use the latter
approach, where our framework mainly processes the
data at the offline data preprocessing stage, the online
server data preparation stage, and the client visualiza-
tion stage.
As shown in Figure 2, the offline data preprocess-
ing stage monitors new incoming data from the ex-
periment using a cron service (Step 1) and caches the
LOD data (Step 2). Depending on the client perfor-
mance, our framework selects the best cache data that
provides a good visual quality and a reasonable band-
width transmission (Step 3). The client visualization
stage then render the selected data by performing a
direct volume rendering or a surface rendering. Dur-
ing the online server data preparation stage, a high-
resolution slicemap is generated on-the-fly upon user
demand. The generated slicemap uses the cache data
IVAPP 2017 - International Conference on Information Visualization Theory and Applications
154
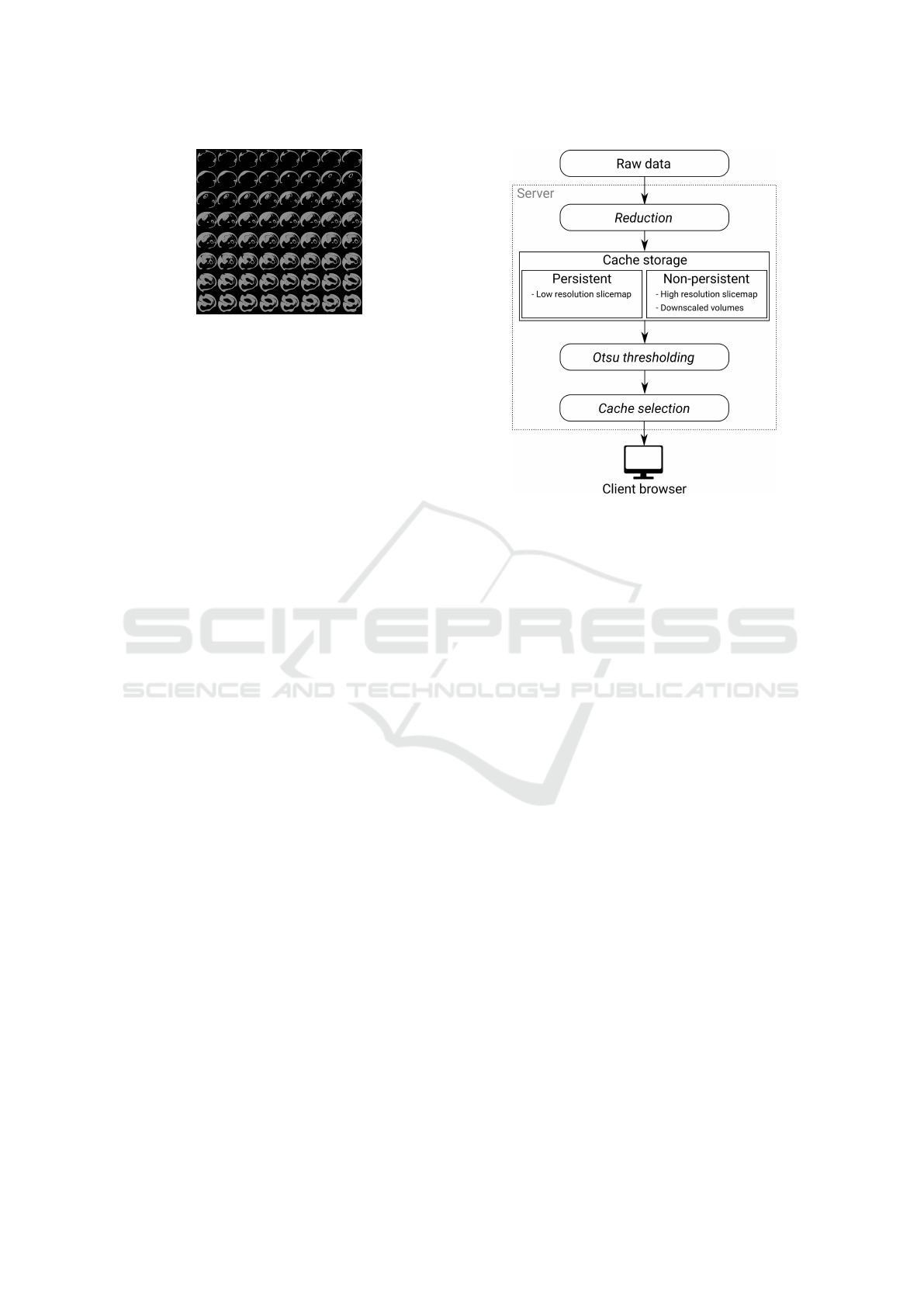
Figure 3: An 8 × 8 slicemap of a biological screw (van de
Kamp et al., 2011).
to reduce the wait time.
To deal with the growing data size in the server
storage, data that are no longer in active use, are
pushed to a dedicated remote archive (Step 4). At
the same time, non-persistent caches are flushed while
preserving persistent caches. These persistent cache
data are later served as a list of visual previews for
remote data browsing.
Throughout our framework, the usage of the
slicemap is motivated by the lack of 3D texture sup-
port in the WebGL. This restriction led us to emulate
the 3D texture by utilizing the available 2D texture
feature. By packing the image slices into mosaic for-
mat (slicemap), we load these slicemaps into the tex-
ture memory and and use the pixel shader to calculate
the x,y coordinate from the z coordinate of the cor-
responding slicemap. For example, a 256 × 256 × 64
volume constitutes a slicemap with 2048 × 2048 pix-
els arranged as an 8 × 8 grid of 256 × 256 pixels im-
age slice. Figure 3 shows an 8 ×8 slicemap generated
from a segmented biological screw data (van de Kamp
et al., 2011).
3.1 Server Architecture
Figure 4 shows the WAVE server architecture, where
each data set undergoes the data reduction, the data
caching, and the data thresholding stages before serv-
ing the slicemap to the client.
Starting from the raw data stage, a cron service
monitors incoming new data sets and triggers a se-
ries of batch jobs. These batch jobs are mainly dis-
cussed in the data reduction stage (Section 3.1.1),
where the data size is reduced and transformed into
cache formats. These formats are categorized as low-
resolution slicemap, high-resolution slicemap, and
downscaled volume. With cache data readily avail-
able, our framework performs progressive loading by
loading a low-resolution slicemap first, followed by a
suitable high-resolution slicemap loading in the back-
ground. The suitable high-resolution slicemap in this
context refers to the slicemap that satisfies the client
Figure 4: Detailed server architecture.
hardware requirement.
We also allow online generation of slicemap
with level of detail higher than the high-resolution
slicemap in the zoom-on-demand approach (Sec-
tion 3.3). During the online slicemap generation, the
cached downscaled volume is used to minimize the
wait time. Only the low-resolution slicemap is stored
as a persistent cache, whereas the other caches are
non-persistent. While each raw data is stored in a
folder, we store its respective caches within its folder
as well.
3.1.1 Data Reduction
Due to the large data size, we downscaled the raw
data before transforming it into a slicemap. We used
the Lanczos filter from ImageMagick to perform the
downscaling operation. After downscaling, we trans-
formed the downscaled volumes into a PNG-format
slicemap. For example, a raw data set of a carpen-
ter ant (Garcia et al., 2013) with 2016 × 2016 × 2016
voxels (7.7 GB) can be downscaled and transformed
into a low-resolution slicemap with 256 × 256 × 256
voxels (2 MB). Figure 5 shows the processing time of
each operation during the online server data prepara-
tion performed on a 64 bit Quad-Core Intel(R) Core
i7-3770 CPU at 3.40 GHz. These operations are dis-
cussed more in Section 3.3. Our initial study shows
that the time taken to perform the downscaling op-
eration is much higher than the others, which moti-
vates us to precompute a set of downscaled volumes
as caches. In our framework, we had chosen down-
scaled volumes with 256
3
voxels, 512
3
voxels, 768
3
WAVE: A 3D Online Previewing Framework for Big Data Archives
155

Table 1: Relationship between the varying size of the slicemap and the frame rate of the client devices.
Device (GPU) Texture Unit Texture Size GFXbench
a
Voxels (fps)
(pixels) (frames) 128
3
256
3
512
3
Desktop (Titan) 32 16384
2
107898 1301 649 245
Laptop (GT750M) 16 16384
2
8821 200 112 45
Desktop (HD4000) 16 8192
2
3362 102 32 11
b
Phone (Adreno330) 16 4096
2
1601 30 12
b
1
b
a
The frame metrics are taken from GFXBench benchmarking suite tested with T-Rex off-screen 1080p (Kishonti, 2011).
This metric shows the performance of each GPU (higher the better).
b
<15fps. Unacceptable user perception quality (Claypool et al., 2006).
crop
downscale transform
0
20
40
60
2.08
56.03
3.61
Processing time, s
Figure 5: Online server data preparation of a 2016×2016 ×
2016 voxels carpenter ant data set (Garcia et al., 2013).
voxels, and 1024
3
voxels. By having slicemaps and
downscaled volumes as caches, our framework is able
to serve data at an interactive rate.
3.1.2 Multi-resolution Support
To support a broad range of clients with varying hard-
ware, multi-resolution slicemaps that vary in resolu-
tion details are created. As the size for slicemaps may
differ according to the client hardware, we performed
a study on the relationship between the varying size of
slicemaps and the frames-per-second of various client
devices. Here, we had chosen a broad range of client
devices, covering from less powerful mobile phone up
to powerful desktop. The performance of each client
device rendering multiple data sizes is shown in Ta-
ble 1. In this study, we assumed that the data size is
inversely proportional to the scale of data transmis-
sion. In other words, a small data size results in a
high data transmission, whereas a larger data size re-
sults in a lower data transmission. Detailed time taken
in data transmission for various slicemap sizes under
different network presets is shown later in Section 4.
We determine the user acceptance metric base on the
study conducted by Claypool et al.. In their study,
the user performance and the user perception quality
dropped significantly when the frames-per-second is
below 15fps (Claypool et al., 2006).
As shown in Table 1, the data set with 128
3
vox-
els provides the best frames-per-second across the se-
lected client devices; data sets with 256
3
voxels and
512
3
voxels are imposing problems on the smaller
Table 2: Multi-resolution hierarchy scheme definition.
Level Scheme Voxels Format
0 256
3
× 2
0
16777216 256 × 256 × 256
1 256
3
× 2
1
33554432 256 × 256 × 512
2 256
3
× 2
2
67108864 512 × 512 × 256
3 256
3
× 2
3
134217728 512 × 512 × 512
client device. However, data set with 128
3
voxels
delivered a visual object that is no longer recogniz-
able leading us to select a slicemap with 256
3
vox-
els as the low-resolution slicemap, and higher voxel
size as high-resolution slicemaps. Although the data
set with 256
3
voxels had an unacceptable frames-per-
second (<15fps) on the mobile device, but we can fur-
ther improve the client rendering with an optimized
code. Though it may seem that only two data sizes
are available as cache levels, we vary the z-axis to
give us more granularity for gradual visual improve-
ment. We define a hierarchy of levels varying in the
amount of voxels. With N levels of slicemaps, each
level N slicemap contains 256
3
× 2
N
voxels. In our
framework, we precompute four levels of slicemaps
to cover most client resources (Table 2). Our scheme
can be further extended depending solely on the ad-
vancement of the hardware.
In the cache selection stage, a suitable slicemap
is selected depending on the client hardware re-
quirement. There are two parameters that deter-
mine the client performance: texture size and tex-
ture unit. The texture size defines the image reso-
lution of the slicemap, whereas the texture unit de-
fines the amount of slicemaps that can be rendered.
To select the suitable slicemap level, the product of
the texture unit and the texture size of the mobile
device is used as our baseParameter (16 × 4096 =
65536). We then compute the appropriate cache
level by blog
2
clientTextureUnit×clientTextureSize
baseParameter
c, where
clientTextureUnit and clientTextureSize are acquired
from the client hardware requirements.
3.1.3 Data Thresholding
We are mostly dealing with electron microscopy im-
ages of biological specimens, that are especially noisy
IVAPP 2017 - International Conference on Information Visualization Theory and Applications
156
(a) Grey value: 0 - 255 (b) Grey value: 107 - 255
Figure 6: A 3D volume rendering without (a) and with (b)
Otsu thresholdings. The calculated Otsu threshold is 107.
Figure 7: Detailed client architecture.
and low contrasted (Coudray et al., 2010). With no
prior knowledge of the region of interest, our visual
previewer framework might end up showing all avail-
able grey values from the data set, rendering a 3D ob-
ject that fills up the entire volume as shown in Fig-
ure 6a. Under such circumstances, the user can filter
out the grey values using the WAVE interface settings
(Figure 1). However, a visual previewer framework
that requires manual thresholding from users is not
easy to use. Instead, we adopt the Otsu thresholding
method on our low-resolution slicemap.
The Otsu thresholding method tries to minimize
the combine spread between the two clusters by mov-
ing the threshold along the grey value range (within-
class variance). We chose another variation of the
Otsu method that depends only on the difference be-
tween the means of the two clusters, thus avoiding
the need to calculate differences between individual
intensities and the cluster means (Morse, 2000). This
variant is described in (1).
σ
2
Between
(T ) = n
B
(T )n
O
(T )[µ
B
(T ) − µ
O
(T )]
2
(1)
where T is the varying threshold along the range
of grey values. σ
2
Between
is the mean difference be-
tween the two clusters. n
B
(T ) is the sum of pixels in
(a) (b) (c)
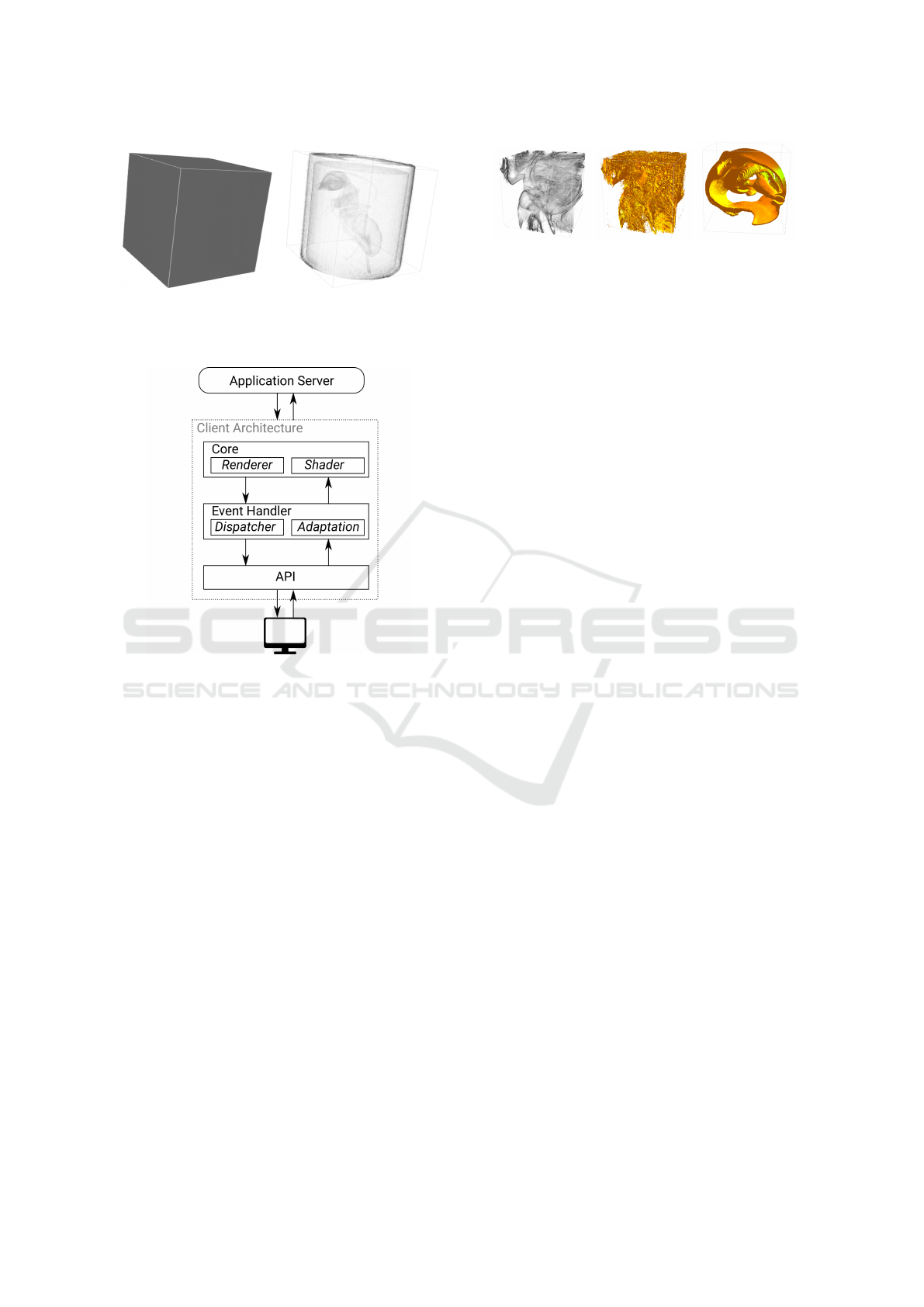
Figure 8: A 3D visualization of segmented and non-
segmented biological screw data sets using the volume ren-
dering and the surface rendering methods. (a) Volume ren-
dering with raw data set. (b) Surface rendering with raw
data set. (c) Surface rendering with segmented data set.
the background (below threshold). n
O
(T ) is the sum
of pixels in the foreground (above threshold). µ
B
(T )
and µ
O
(T ) are variances of pixels in background (be-
low threshold) and foreground (above threshold), re-
spectively. We select the threshold that gives us the
highest mean difference between the two clusters.
Although one might argue that the Otsu thresh-
olding method should be performed on the raw data.
But, we achieved great success performing the Otsu
method on the low-resolution slicemap, in which the
correct threshold value is acquired in a much shorter
time. This threshold value can be applied to all other
slicemaps stemming from the same raw data. Fig-
ure 6b shows a 3D object rendered with an Otsu
threshold of 107. It is worth noting that the thresh-
old value serves as a reference for the minimum grey
value, and user still has the option to change the
threshold value through the WAVE user interface.
3.2 Client Architecture
Our WAVE client is implemented in Javascript, which
is written on top of the ThreeJS library (Cabello,
2011) that utilizes WebGL (Khronos, 2011). The
Javascript language offers platform independence,
and it can be interpreted at every major client browser.
Figure 7 depicts our client architecture, which is
consist of a core layer, an event handler layer, and
an application programming interface (API) layer.
The core layer is responsible for rendering the
slicemap. Within the core layer, the renderer and the
shader components perform the direct volume ren-
dering based on the work from Kruger and Wester-
mann (Kruger and Westermann, 2003) and the lo-
cal surface illumination model using the Blinn-Phong
model (Blinn, 1977). Figure 8 shows 3D visualiza-
tions of both raw and segmented biological screw data
sets in both volume rendering and surface rendering
modes. Although we support both the volume ren-
dering and the surface rendering methods, the volume
rendering method is more suited to visualize new data
set due to its ability to inspect the inner structure; The
surface rendering method provides an attractive visual
WAVE: A 3D Online Previewing Framework for Big Data Archives
157
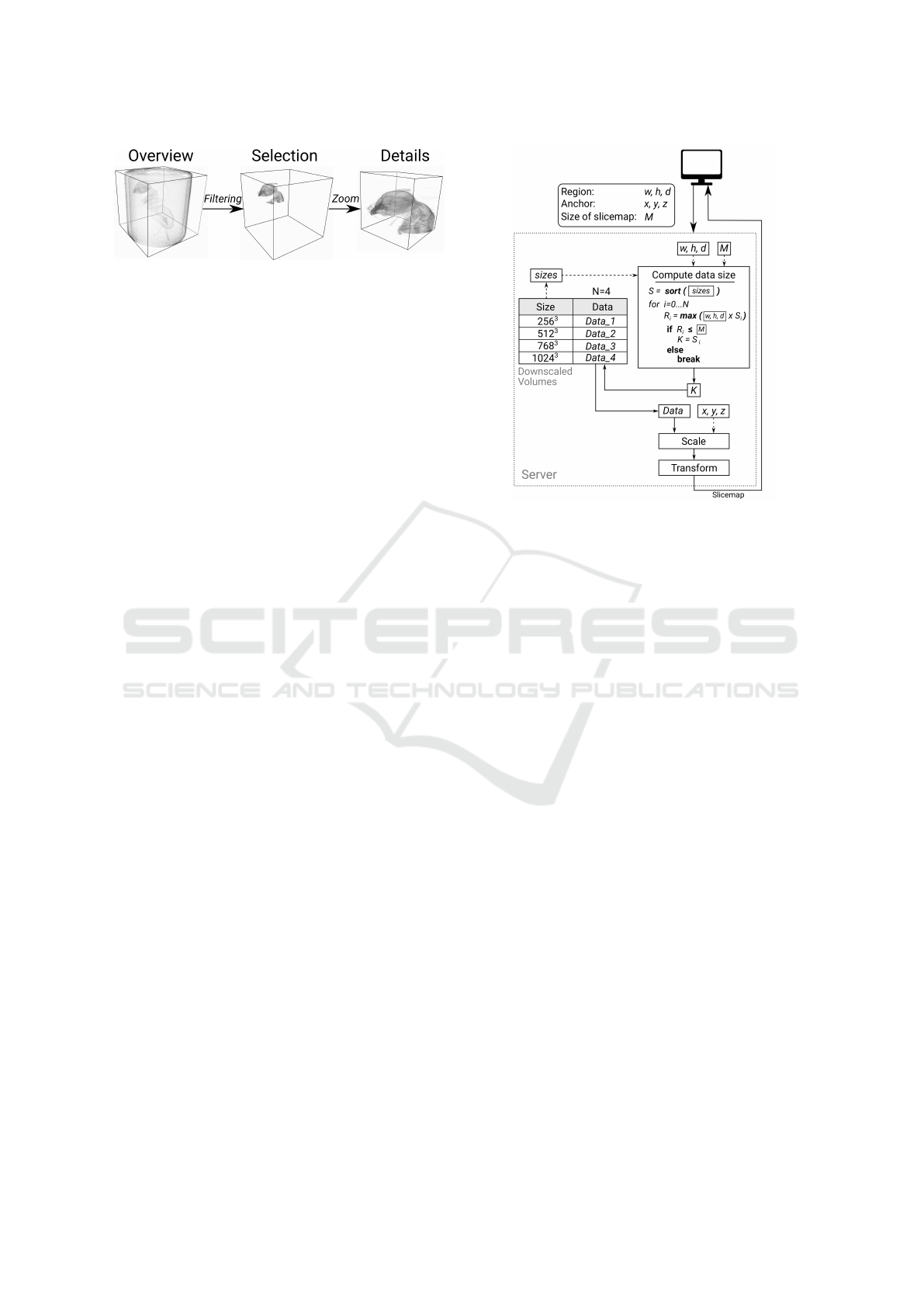
Figure 9: An illustration of zoom-on-demand feature.
quality on the segmented data set (Figure 8c).
In the volume rendering approach, ray is emulated
and sampled with a constant step size. These sampled
points then contribute to the final composition func-
tion. By varying the step size, the performance and
visual detail of the rendered object can be adapted ac-
cordingly. This is a matter of trade off between per-
formance and visual detail, where large step size leads
to faster rendering but less visual details. We reduce
the step size during a dynamic 3D object movement
and increase the step size when the object is static.
In order to facilitate user interactions from the
browser, the WAVE client provides a set of API.
These API calls allow the user to configure the core
layer from the browser directly. Furthermore, they
provide an easy integration into a variety of web
applications with varying designs and layouts, e.g.
Biomedisa web application (Lösel and Heuveline,
2016). In the event handler layer, the adaptation com-
ponent and the dispatcher component handle the user
state and the core layer state between the WAVE client
and the user interface. In particular, our client frame-
work provides four features to inspect and analyze the
data set: (a) by selecting the grey value threshold, (b)
by adjusting the transfer function, (c) by changing the
camera position and (d) by slicing through the 3D ob-
ject. The first feature (a) is useful to inspect a new
data set, where the grey value threshold is selected
to remove the unwanted background. The second fea-
ture (b) enables transfer function update (Pfister et al.,
2001); Each grey value is assigned a colour according
to the selected function to help in classification of the
data set. The third feature (c) changes the camera po-
sition of the viewer in the 3D scene allowing the user
to view the 3D data in any angle and distance. The
last feature (d) slices through the 3D object in x, y
and z-directions providing flexibility for the user to
inspect the inner structure of the data set.
3.3 Zoom on Demand
The WAVE framework supports the zoom-on-demand
approach, which follows the visual information seek-
ing mantra, overview first, zoom and filter, then
details-on-demand (Shneiderman, 1996). The zoom-
on-demand approach allows the user to select a re-
Figure 10: Selection of the cached downscaled volumes ac-
cording to client requirements.
gion of interest from the 3D volume for more details
(Figure 9). Using the browser cache (high-resolution
slicemap), a new slicemap is initally generated con-
sisting of the selected region, where the number of
slices is determined and each image slice is cropped
accordingly. These operations are performed locally
in the client browser using the JavaScript language.
At the same time, another slicemap with higher de-
tails containing the selected region is created from
the server (online server data preparation). The on-
line server data preparation uses the readily cached
downscaled volume for fast slicemap generation.
To select the downscaled volume, the intended
slicemap size, M, the selected region parameters,
[w, h, d], and the anchor points, [x, y, z], are acquired
from the client, where x, y, z are the starting points of
the selected region; and w, h, d are the width, height
and depth of the selected region (x, y, z, w, h, d ∈
[0, 1]). Figure 10 shows the process to select the suit-
able downscaled volume. To compute the suitable
downscaled volume size, we iterate through all the
sizes from 256 to 1024. At each iteration, we select
the product of the region parameters, [w, h, d], and the
current iterated size, S
i
, that is less than the size of the
intended slicemap, M. Whenever the current iterated
size, S
i
, is larger than the intended size, M, the previ-
ous iterated size is selected. The selected downscaled
volume is then scaled according to the region param-
eters and the anchor points. Lastly, the scaled data is
transformed into the intended slicemap format before
serving it back to the client.
IVAPP 2017 - International Conference on Information Visualization Theory and Applications
158
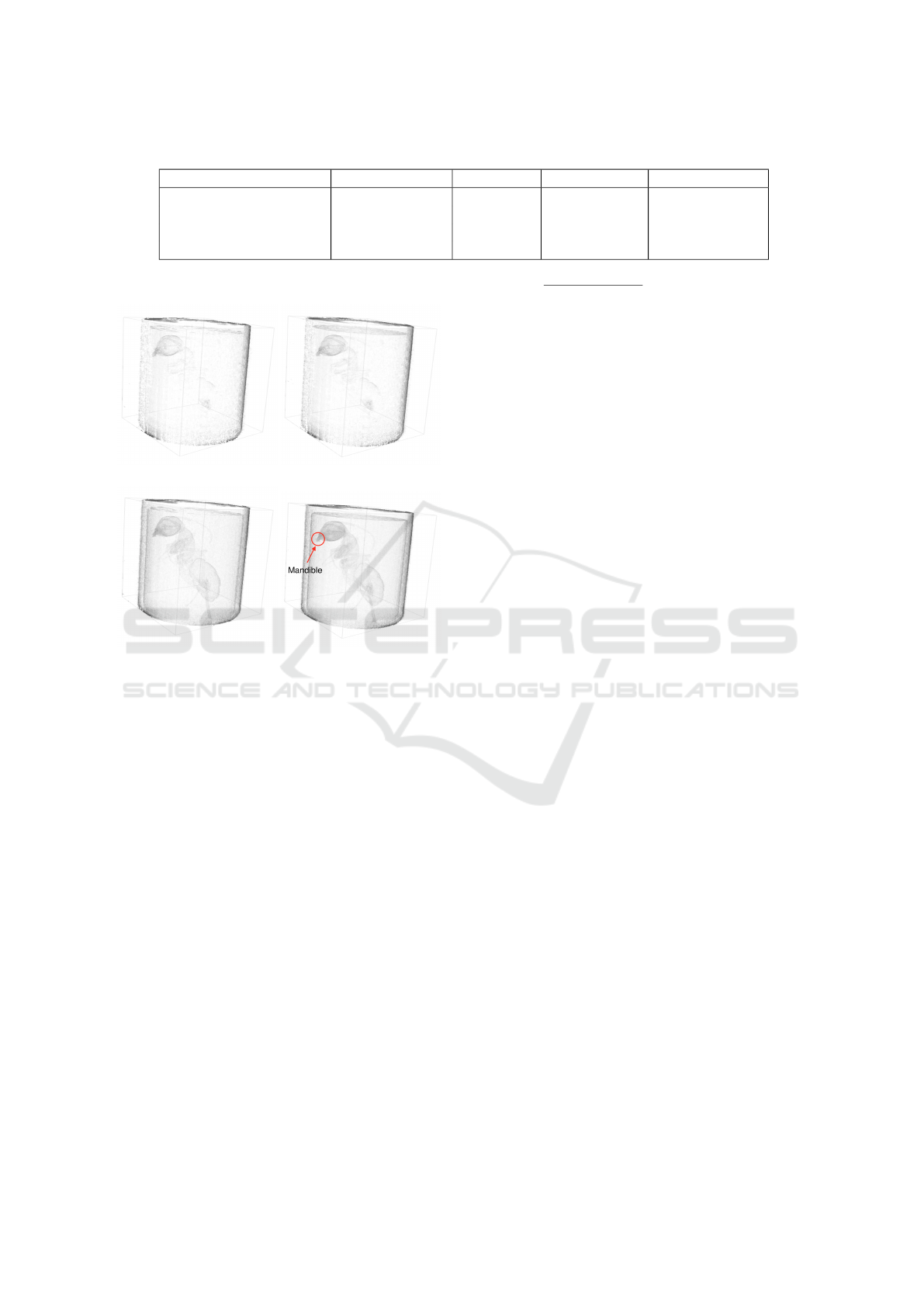
Table 3: A series of slicemaps produced from the carpenter ant data set (Garcia et al., 2013) in the WAVE server.
Category Scheme Voxels Slicemap Size Reduction Ratio
a
Low-resolution (level 0) 256 × 256 × 256 16777216 1.90 MB 488
High-resolution (level 1) 256 × 256 × 512 33554432 3.90 MB 244
High-resolution (level 2) 512 × 512 × 256 67108864 9.70 MB 122
High-resolution (level 3) 512 × 512 × 512 134217728 20.10 MB 61
a
Reduction ratio is used to quantify the reduction in data representation size (voxels) produced from the WAVE server. The
raw data set consisted of 2016 ×2016 ×2016 voxels. ReductionRatio =
rawAmountVoxels
reducedAmountVoxels
(a) 256 ×256 ×256 (level 0) (b) 256 ×256× 512 (level 1)
(c) 512 ×512 ×256 (level 2) (d) 512 ×512× 512 (level 3)
Figure 11: Four 3D objects of a carpenter ant (Garcia et al.,
2013) rendered from our multi-resolution slicemaps: (a)
AE: 0, RMSE: 0%, base image, (b) AE: 90264, RMSE:
0.049%, (c) AE: 178678, RMSE: 0.060%, and (d) AE:
201959, RMSE: 0.068%.
4 EVALUATION
The WAVE framework is currently implemented in
the Astor web portal (Astor, 2014), in the USCT
application (Ruiter et al., 2013) and also in the
Biomedisa online segmentation application (Lösel
and Heuveline, 2016). To illustrate the image quality
and the performance delivered by our framework, we
selected a carpenter ant data set (Garcia et al., 2013)
with 2016
3
voxels. The carpenter ant belongs to the
order of Hymenoptera under the family of Formici-
dae. This raw data was transformed into a series of
slicemaps according to our multi-resolution scheme
definition (Table 3). A set of downscaled volumes
were also cached in the server. Throughout our evalu-
ation, we used a 64 bit Quad-Core Intel(R) Core i7-
3770 CPU at 3.40 GHz as our server, and a Mac-
bookPro running on a NVIDIA GeForce GT750M as
our client.
4.1 Visual Quality
Serving as a large data previewing framework, our
framework must be able to present a recognizable
visual object using our hierarchy of multi-resolution
slicemaps. Also, the zoom-on-demand approach must
provide more details on the selected sub-region.
The visual quality of the WAVE framework is de-
termined according to the amount of pixels rendered
on the browser screen. More pixels imply that more
details are rendered, thus giving us a better preview.
We used the absolute error count metric (AE) to show
the number of different pixels in a masked image. The
mask image refers to a resultant image from mask-
ing the test image against a base image. Also, we
used the root mean squared error (RMSE) to show
the gradual visual improvement in our framework ap-
proaches. We performed these widely used image
quality metrics on 3D object screenshots rendered
by multi-resolution slicemaps and zoom-on-demand
slicemaps.
Figure 11 shows previews of the carpenter ant
rendered by our multi-resolution slicemaps, from
level 0 to level 3. Here, the low-resolution slicemap,
level 0, was selected as the base image tested against
four multi-resolution slicemaps. Although the low-
resolution slicemap (level 0) has lesser details, the
structure still resembles the carpenter ant. The
mandible of the carpenter ant is visible in all rendered
objects. Nevertheless, we can see a gradual visual im-
provement from level 0 to level 3. The gradual vi-
sual improvement is also indicated from the increas-
ing value of AE and RMSE.
We further evaluated the zoom-on-demand ap-
proach, in which 3D object with higher details are
created from browser cached slicemap and later
from server cached downscaled volume. Figure 12
shows the upper body of the carpenter ant rendered
from browser cached multi-resolution slicemaps from
level 0 to level 3. Although the level 2 slicemap ob-
ject had a higher AE and RMSE values than the level
3 slicemap object, the smooth edges in the level 3
slicemap object lent itself to a lesser masked region,
WAVE: A 3D Online Previewing Framework for Big Data Archives
159
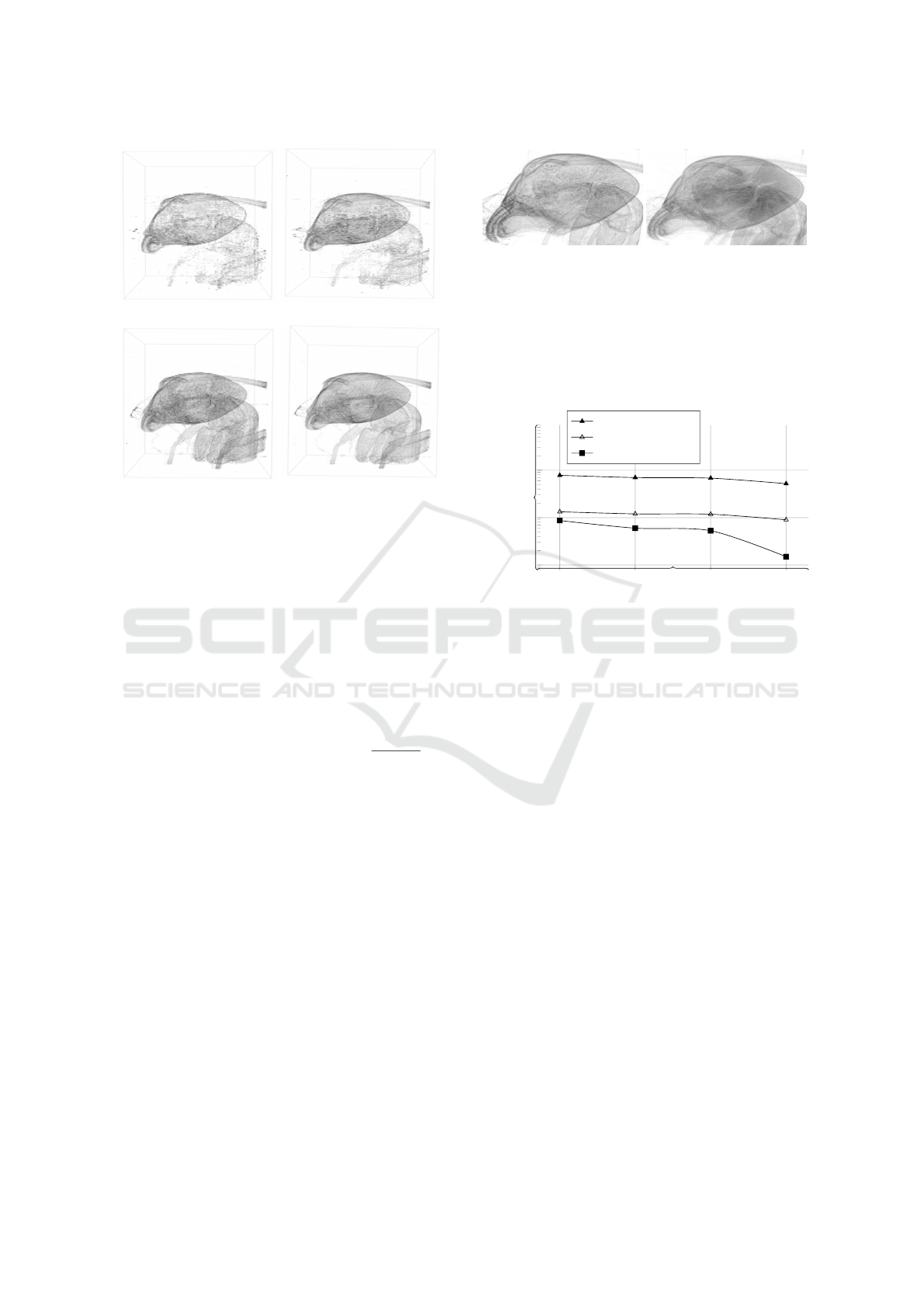
(a) level 0 (b) level 1
(c) level 2 (d) level 3
Figure 12: The visual quality of the zoomed carpenter ant
(upper body) created by multi-resolution slicemaps in the
client browser using the JavaScript language: (a) AE: 0,
RMSE: 0%, base image, (b) AE: 126586, RMSE: 0.055%,
(c) AE: 160369, RMSE: 0.080%, and (d) AE: 159571,
RMSE: 0.069%.
thus resulting in a slightly smaller AE and RMSE val-
ues.
During the zoom-on-demand, our framework trig-
gered a request to the server for a slicemap with better
quality. In this particular test, our client was running
on a GTX Titan graphic card with a texture unit and
texture size of 32 and 16384px, respectively. Thus, the
cache level suitable for our client is blog
2
32×16384
65536
c =
3. The level 3 slicemap consists of 512 × 512 × 512
voxels, resulting in M value of 134217728. We se-
lected the zoom region (carpenter ant’s head) using
the WAVE user interface and sent [x, y, z, w, h, d] =
[0.15, 0.43, 0.62, 0.38, 0.38, 0.38] to the server. Base
on the selection algorithm shown in Figure 10, the
downscaled volume of size 1024
3
was selected. Fig-
ure 13 compares the visual quality of 3D objects ren-
dered from the browser cached and the server cached
slicemaps using the same set of parameters.
The results showed that the WAVE framework
is capable of delivering recognizable visual pre-
views from the large data using the prepared multi-
resolution slicemaps. Even the 3D objects rendered
by the newly generated slicemaps from the browser
cached slicemap and the server cached downscaled
volume are able to provide more visual details for fur-
ther analysis.
(a) Browser cached (level 3
slicemap).
(b) Server cached (Down-
scaled volume 1024
3
).
Figure 13: A comparison between a browser cached (level 3
slicemap) and a server cached (Downscaled volume 1024
3
)
on a client (GTX Titan) with M = 512 × 512 × 512 and
[x, y, z, w, h, d] = [0.15, 0.43, 0.62, 0.38, 0.38, 0.38]. The se-
lected region is the carpenter ant’s head. (a) RMSE: 0.24%,
(b) RMSE: 0.29%. A white image is used as the base image
to perform image quality comparison.
Level 0 Level 1 Level 2 Level 3
10
100
1,000
frames-per-second, fps
GTX Titan (1301
a
)
GT750M (200
a
)
HD4000 (102
a
)
Figure 14: The frames-per-second for multi-resolution
slicemaps on various client resources (sampling step=256).
a
refers to the frame metrics from the WAVE framework
tested against each client hardware with a test data size of
128
3
voxels (the higher the better).
4.2 Performance
The WAVE performance is determined mainly by the
user experience, which is related to the system in-
teractivity and latency. The first tests measure the
responsiveness of the client-side rendering; this rep-
resents average frame rates across various client de-
vices. However, frame rate alone does not give us
an overview of the overall performance. The latency
between server-client interaction also affects the per-
ceived system interactivity. Hence, we performed
tests to measure the page load time for various data
sizes, and to measure the total time taken to perform
the online server data preparation (zoom-on-demand).
4.2.1 Frame Rates
The rendering performance of the client hardware is
related to the slicemap size, the volume rendering
sampling step size, and the GPU hardware.
Figure 14 shows the frame rate of our multi-
resolution slicemaps rendered on various client hard-
ware. From the result shown, the slicemap containing
IVAPP 2017 - International Conference on Information Visualization Theory and Applications
160
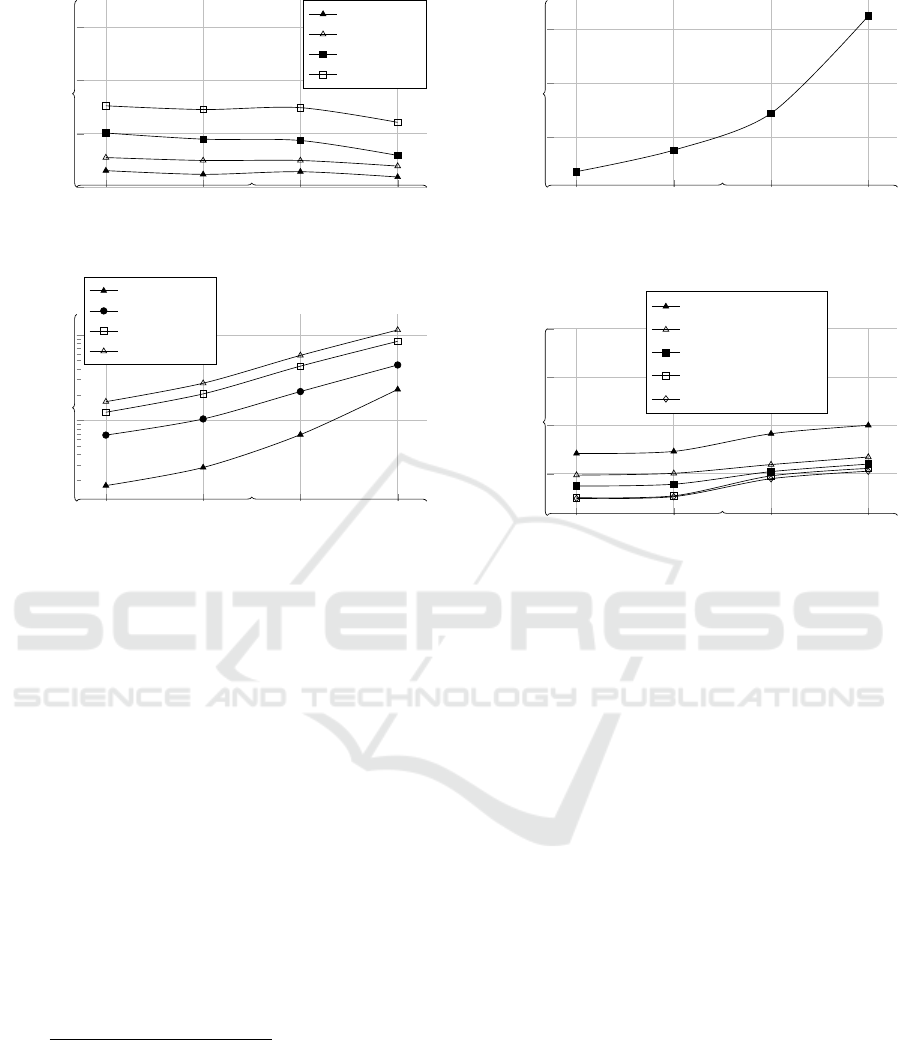
Level 0 Level 1 Level 2 Level 3
0
200
400
600
frames-per-second, fps
Steps=1024
Steps=512
Steps=256
Steps=128
Figure 15: The frames-per-second for various slicemaps by
varying sampling steps in MacbookPro (GT750M).
Level 0 Level 1 Level 2 Level 3
10
100
Page load time, s
Wifi 30 Mb/s
4G 4 Mb/s
DSL 2 Mb/s
3G 1.5 Mb/s
Figure 16: Latency for multi-resolution slicemaps on differ-
ent network presets.
higher details requires better client hardware for bet-
ter performance. We also showed the relationship be-
tween varying sampling step size and the frame rate
on a MacbookPro running on a NVIDIA GeForce
GT750M (Figure 15). This test is only valid for
the volume rendering mode, as the surface rendering
mode stops at the first ray intersection point.
4.2.2 Latency
Figure 16 shows the data latency between the server
and the client serving multi-resolution slicemaps un-
der different network presets. Although our frame-
work offers a hierarchy of slicemaps to ensure inter-
active response across a broad range of clients, the
higher slicemap levels require a good network con-
nection to be effective.
According to the client hardware,
a high-resolution slicemap selected by
blog
2
clientTextureUnit×clientTextureSize
baseParameter
c is loaded.
By zooming onto the upper body of the carpenter ant
([x, y, z, w, h, d] = [0.15, 0.43, 0.62, 0.38, 0.38, 0.38]),
our framework first creates a new slicemap from
the browser cached high-resolution slicemap. Fig-
ure 17 shows each slicemap generation time from its
browser cached high-resolution slicemap. Then, our
client requested for a slicemap with higher details
from the server. In practice, our framework selects
the best downscaled volume based on the selection
Level 0 Level 1 Level 2 Level 3
2
4
6
Processing time, s
Figure 17: Performing zoom-on-demand on the client-
side (Javascript) using the browser cached high-resolution
slicemap.
Level 0 Level 1 Level 2 Level 3
100
200
300
400
Processing time, s
Raw (2016
3
)
Downscaled (1024
3
)
Downscaled (768
3
)
Downscaled (512
3
)
Downscaled (256
3
)
Figure 18: The data latency in performing the online server
data preparation from server cached downscaled volumes.
algorithm in Figure 10. However, we showed the
processing latency of the online server data prepara-
tion from the raw data and all available downscaled
volumes: 256
3
, 512
3
, 768
3
, and 1024
3
(Figure 18).
The result showed an improvement of approximately
50 seconds by using the downscaled volume cache
in contrary to creating the slicemap directly from
the raw data. However, there is not much difference
(∼ 3 seconds) in performance between using the
downscaled volume of 256
3
or the downscaled
volume of 512
3
.
The results so far showed the importance of first
loading the low-resolution slicemap (level 0) that has
a much lower latency across various network pre-
sets and renders much faster on various client hard-
ware. We also showed the benefit of using the browser
cached slicemap to create the new zoomed slicemap,
while a better slicemap was being created using the
downscaled volume (server cache).
5 CONCLUSIONS AND FUTURE
WORK
We have presented a 3D visual previewing frame-
work for big data archives that promotes data avail-
ability across various clients. The WAVE framework
WAVE: A 3D Online Previewing Framework for Big Data Archives
161

supports the volume rendering and surface render-
ing, which are useful in identifying a new data or a
postprocessed data. Moreover, our framework allows
zoom-on-demand where user can reload a selected re-
gion with higher visual details. To support the diverse
client hardware, we introduced a hierarchy of multi-
resolution slicemaps mainly for the progressive load-
ing approach, in which the low-resolution slicemap
is displayed first while a suitable high-resolution
slicemap is loading in the background. By perform-
ing the offline data preprocessing at the server side,
the framework can provide previews on large data set
at an interactive rate. The offline data preprocessing
is responsible in reducing the large data size and pre-
pares a series of cache data. These cache data are es-
sential to perform the progressive loading and the on-
line server data preparation (zoom-on-demand). The
visual results and performances of the WAVE frame-
work were promising, which strongly suggested the
WAVE framework being an effective visual previewer
framework.
In future work, we plan to support interactive la-
beling and commenting directly on the biology ob-
ject via our user interface, steering our framework
into becoming a distributed synchronous collabora-
tion tool (Isenberg et al., 2011). We also would like to
introduce new rendering schemes that open up more
visualization opportunities for better data inspection
and analysis. One of the highlights in our work is the
usage of slicemap as our main data object. We could
simplify the in-situ visualization approach by produc-
ing multiple intermediate slicemaps to monitor the
progress of a simulation or segmentation process. As
our slicemap is in an image format, we would further
improve the image compression technique for better
data latency over the network, e.g. compressing im-
age slices into a video. Although the Otsu threshold-
ing method performed seemingly well in our frame-
work, extending the spectrum of thresholding meth-
ods is by all means beneficial (Rosin, 2001; Coudray
et al., 2010). Furthermore, an automated heuristic is
an attractive addition to the WAVE framework, which
selects a rendering method and settings based on the
server performance, the network bandwidth, the client
hardware and the user needs.
ACKNOWLEDGMENTS
The authors would like to acknowledge Fe-
lix Schultze, Alexey Tukalo, Guven Gokdemir
and Wu Chengzhi for their contributions to the
WAVE framework. We also thank Michael Heethoff,
Sebastian Schmelzle, Thomas van de Kamp, Nicole
Ruiter and Torsten Hopp for helpful discussions on
their experiment data sets.
REFERENCES
Ahrens, J., Jourdain, S., O’Leary, P., Patchett, J., Rogers,
D. H., and Petersen, M. (2014). An image-based ap-
proach to extreme scale in situ visualization and anal-
ysis. In Proceedings of the International Conference
for High Performance Computing, Networking, Stor-
age and Analysis, pages 424–434. IEEE Press.
Astor (2014). Astor web portal. https://anka-astor-
portal.anka.kit.edu/.
Behr, J., Eschler, P., Jung, Y., and Zöllner, M. (2009).
X3dom: a dom-based html5/x3d integration model.
In Proceedings of the 14th International Conference
on 3D Web Technology, pages 127–135. ACM.
Blinn, J. F. (1977). Models of light reflection for computer
synthesized pictures. In ACM SIGGRAPH Computer
Graphics, volume 11, pages 192–198. ACM.
Burigat, S. and Chittaro, L. (2013). On the effectiveness
of overview+ detail visualization on mobile devices.
Personal and ubiquitous computing, 17(2):371–385.
Cabello, R. (2011). Threejs. https://threejs.org/.
Childs, H. (2007). Architectural challenges and solutions
for petascale postprocessing. In Journal of Physics:
Conference Series, volume 78, page 012012. IOP Pub-
lishing.
Claypool, M., Claypool, K., and Damaa, F. (2006). The ef-
fects of frame rate and resolution on users playing first
person shooter games. In Electronic Imaging 2006,
pages 607101–607101. International Society for Op-
tics and Photonics.
Congote, J., Segura, A., Kabongo, L., Moreno, A., Posada,
J., and Ruiz, O. (2011). Interactive visualization of
volumetric data with webgl in real-time. In Proceed-
ings of the 16th International Conference on 3D Web
Technology, pages 137–146. ACM.
Coudray, N., Buessler, J.-L., and Urban, J.-P. (2010). A ro-
bust thresholding algorithm for unimodal image his-
tograms. Pattern Recognition Letters, (31):1010–
1019.
Esnard, A., Richart, N., and Coulaud, O. (2006). A steer-
ing environment for online parallel visualization of
legacy parallel simulations. In 2006 Tenth IEEE In-
ternational Symposium on Distributed Simulation and
Real-Time Applications, pages 7–14. IEEE.
Garcia, F. H., Wiesel, E., and Fischer, G. (2013). The ants
of kenya (hymenoptera: Formicidae)-faunal overview,
first species checklist, bibliography, accounts for all
genera, and discussion on taxonomy and zoogeog-
raphy. Journal of East African Natural History,
101(2):127–222.
Isenberg, P., Elmqvist, N., Scholtz, J., Cernea, D., Ma, K.-
L., and Hagen, H. (2011). Collaborative visualization:
definition, challenges, and research agenda. Informa-
tion Visualization, 10(4):310–326.
Isenberg, P., Isenberg, T., Sedlmair, M., Chen, J., and
Möller, T. (2017). Visualization as seen through its
IVAPP 2017 - International Conference on Information Visualization Theory and Applications
162

research paper keywords. IEEE Transactions on Visu-
alization and Computer Graphics, 23(1).
Johnson, C., Parker, S. G., Hansen, C., Kindlmann, G. L.,
and Livnat, Y. (1999). Interactive simulation and vi-
sualization. Computer, 32(12):59–65.
Khronos (2011). WebGL - OpenGL ES 2.0 for the Web,
https://www.khronos.org/webgl/.
Kimball, J., Duchaineau, M., and Kuester, F. (2013). Inter-
active visualization of large scale atomistic and cos-
mological particle simulations. In Aerospace Confer-
ence, 2013 IEEE, pages 1–9. IEEE.
Kishonti (2011). Gfxbench 4.0. https://gfxbench.com/.
Kruger, J. and Westermann, R. (2003). Acceleration tech-
niques for gpu-based volume rendering. In Proceed-
ings of the 14th IEEE Visualization 2003 (VIS’03),
page 38. IEEE Computer Society.
Larsen, M., Brugger, E., Childs, H., Eliot, J., Griffin,
K., and Harrison, C. (2015). Strawman: A batch
in situ visualization and analysis infrastructure for
multi-physics simulation codes. In Proceedings of the
First Workshop on In Situ Infrastructures for Enabling
Extreme-Scale Analysis and Visualization, pages 30–
35. ACM.
Lorendeau, B., Fournier, Y., and Ribes, A. (2013). In-situ
visualization in fluid mechanics using catalyst: A case
study for code saturne. In LDAV, pages 53–57.
Lösel, P. and Heuveline, V. (2016). Enhancing a diffusion
algorithm for 4d image segmentation using local in-
formation. In SPIE Medical Imaging, pages 97842L–
97842L. International Society for Optics and Photon-
ics.
Lu, D., Zhu, D., Wang, Z., and Gao, J. (2015). Effi-
cient level of detail for texture-based flow visualiza-
tion. Computer Animation and Virtual Worlds.
Ma, K. L. (2009). In situ visualization at extreme
scale: Challenges and opportunities. IEEE Computer
Graphics and Applications, 29(6):14–19.
Malakar, P., Natarajan, V., and Vadhiyar, S. S. (2010).
An adaptive framework for simulation and online re-
mote visualization of critical climate applications in
resource-constrained environments. In Proceedings
of the 2010 ACM/IEEE International Conference for
High Performance Computing, Networking, Storage
and Analysis, pages 1–11. IEEE Computer Society.
Morse, B. S. (2000). Lecture 4: Thresholding. Brigham
Young University.
Pfister, H., Lorensen, B., Bajaj, C., Kindlmann, G.,
Schroeder, W., Avila, L. S., Raghu, K., Machiraju,
R., and Lee, J. (2001). The transfer function bake-
off. IEEE Computer Graphics and Applications,
21(3):16–22.
Ressmann, D., Mexner, W., Vondrous, A., Kopmann, A.,
and Mauch, V. (2014). Data management at the syn-
chrotron radiation facility anka. In 10th International
Workshop on Personal Computers and Particle Accel-
erator Controls, PCaPAC 2014.
Rivi, M., Calori, L., Muscianisi, G., and Slavnic, V. (2012).
In-situ visualization: State-of-the-art and some use
cases. PRACE White Paper; PRACE: Brussels, Bel-
gium.
Rosin, P. L. (2001). Unimodal thresholding. Pattern recog-
nition, 34(11):2083–2096.
Ruiter, N., Zapf, M., Dapp, R., Hopp, T., Kaiser, W.,
and Gemmeke, H. (2013). First results of a clini-
cal study with 3d ultrasound computer tomography.
In 2013 IEEE International Ultrasonics Symposium
(IUS), pages 651–654. IEEE.
Shneiderman, B. (1996). The eyes have it: A task by data
type taxonomy for information visualizations. In Vi-
sual Languages, 1996. Proceedings., IEEE Sympo-
sium on, pages 336–343. IEEE.
Szalay, A. and Gray, J. (2006). 2020 computing: Science in
an exponential world. Nature, 440(7083):413–414.
Tu, T., Yu, H., Ramirez-Guzman, L., Bielak, J., Ghattas, O.,
Ma, K.-L., and O’hallaron, D. R. (2006). From mesh
generation to scientific visualization: An end-to-end
approach to parallel supercomputing. In Proceedings
of the 2006 ACM/IEEE conference on Supercomput-
ing, page 91. ACM.
Turk, M. J., Smith, B. D., Oishi, J. S., Skory, S., Skillman,
S. W., Abel, T., and Norman, M. L. (2010). yt: A
multi-code analysis toolkit for astrophysical simula-
tion data. The Astrophysical Journal Supplement Se-
ries, 192(1):9.
van de Kamp, T., Vagovi
ˇ
c, P., Baumbach, T., and Riedel, A.
(2011). A biological screw in a beetle’s leg. Science,
333(6038):52–52.
Williams, L. (1983). Pyramidal parametrics. In ACM Sig-
graph Computer Graphics, volume 17, pages 1–11.
ACM.
Zhang, F., Lasluisa, S., Jin, T., Rodero, I., Bui, H., and
Parashar, M. (2012). In-situ feature-based objects
tracking for large-scale scientific simulations. In High
Performance Computing, Networking, Storage and
Analysis (SCC), 2012 SC Companion:, pages 736–
740. IEEE.
Zinsmaier, M., Brandes, U., Deussen, O., and Strobelt, H.
(2012). Interactive level-of-detail rendering of large
graphs. IEEE Transactions on Visualization and Com-
puter Graphics, 18(12):2486–2495.
WAVE: A 3D Online Previewing Framework for Big Data Archives
163
