
Using Virtual Reality Techniques to Study Cognitive Processes in Car
Driving Activity
Emmanuelle M
´
en
´
etrier
1
, Paul Richard
2
, Vincent Boucher
3
and Christophe Boujon
1
1
Laboratoire de Psychologie des Pays de la Loire (LPPL), Universit
´
e d’Angers, Angers, France
2
Laboratoire de Recherche en Ing
´
enerie des Syst
`
emes (LARIS), Universit
´
e d’Angers, Angers, France
3
Centre d’
´
Etudes et d’Expertise sur les Risques, l’Environnement, la Mobilit
´
e et l’Am
´
enagement, Les Ponts-de-C
´
e, France
Keywords:
Car Driving, Eye-movements, Attention, Boundary Extension, Virtual Reality.
Abstract:
A central question in cognitive sciences is how behaviors adapted to the situations encountered are produced.
This question can be addressed in different ways and often requires the researcher to choose between highly
controlled and standardized laboratory situations (commonly referred to as artificial settings) and studies un-
dertaken in natural settings which may be more realistic, but cannot be controlled as required by a rigorous
scientific approach. Using car driving as an example, our study will show how virtual reality (VR) offers a
compromise between these two alternatives. Indeed, VR can simulate controlled immersive environments that
offer different levels of realism. Moreover, VR makes it possible to implement different devices. For instance,
VR enables researchers to analyze oculomotor behavior, which is fundamental in the field of car driving and is
considered an indicator of attentional deployment. The work presented in this paper is based on a car driving
simulator currently under development and aimed at studying the cognitive processes involved in car driving
such as attentional processes and anticipatory mechanisms.
1 INTRODUCTION
A central question in cognitive sciences is how be-
haviors adapted to the situations encountered are pro-
duced. This question is not as trivial as it seems
because producing relevant behavioral reactions re-
quires the mobilization of complex cognitive pro-
cesses. Car driving thus lies at the heart of numer-
ous researchers concerns and is perceived, in partic-
ular, as an integrated multi-task behavior engaging
several processes and requiring different interrelated
skills that rely on interconnected visual, motor, and
cognitive brain systems (Graydon et al., 2004). One
of the difficulties commonly encountered is the need
to choose between highly controlled laboratory situa-
tions and studies undertaken in natural settings. While
the former confers a more or less artificial character
on the situations, the latter, which is more realistic,
does not enable researchers to control all the parame-
ters of the situations that are expected to be standard-
ized.
The situations created in laboratories are gener-
ally defined by their artificial nature. Indeed, the sit-
uations presented to participants sometimes greatly
differ from the situations encountered in natural set-
tings. To address this problem, some researchers have
focused on presenting driving situations that are as
ecological as possible; i.e., situations presenting nat-
ural scenes depicting either static driving scenes (i.e.,
photographs, e.g., (Galpin et al., 2009) or dynamic
video clips of driving (Crundall et al., 2003)). In ad-
dition to presenting stimuli closer to natural driving
conditions, this choice is largely driven by the need
to present strictly identical situations for all partic-
ipants. Indeed, without this condition, participants
performances cannot be compared and the validity of
the research studies is likely to be prejudiced.
As engaging as it might seem, this mode of work-
ing has its limitations because the researcher depends
on the characteristics of the environment and events
occurring during the capture of movies or still images.
A second limitation is that the subject cannot act on
the environment (even if the researcher is careful to
present situations as close as possible to natural driv-
ing by asking, for instance, the subject to follow the
road by turning a steering wheel), while car driving
mobilizes both perceptual and action-related knowl-
edge (Bl
¨
attler et al., 2012). This highlights the neces-
sity for devices that allow subjects to interact with the
environment in order to be closer to natural driving
138
MÃl’nÃl’trier E., Richard P., Boucher V. and Boujon C.
Using Virtual Reality Techniques to Study Cognitive Processes in Car Dr iving Activity.
DOI: 10.5220/0006230901380145
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 138-145
ISBN: 978-989-758-229-5
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

conditions. An alternative approach to highly con-
trolled experimental situations involves undertaking
studies in natural settings. This approach has been
used by Underwood et al. (2003), who observed the
behavior of car drivers in natural driving situations.
While studies in natural settings present high eco-
logical validity, their greatest shortcoming is that they
do not allow researchers to control the environment in
which the subject is driving (i.e., the different events
that occur despite participants being presented with a
similar path, or the impossibility of predicting traffic
conditions, as in the case of Underwood et al. (2003)),
a necessary condition for acceptable validity. As a re-
sult, the situations differ from participant to partici-
pant and are more difficult to compare.
The development of virtual environments (VEs)
has made possible a compromise between natural and
experimentally controlled situations. Indeed, Virtual
Reality (VR) simulations allow researchers to control
the complexity of the presented environment (e.g., in
terms of perceptive richness, with, for instance, the
addition or withdrawal of visual details such as the
presence of traffic signs) or occurring events (e.g.,
presence or absence of distractors such as vehicles or
pedestrians, or events such as car accidents) (Rizzo,
2002). Moreover, VR makes it possible to implement
different devices (Bian et al., 2013; Bian et al., 2015;
Zhang et al., 2015; Lei et al., 2016). For instance,
VR enables researchers to analyze oculomotor behav-
ior which is fundamental in the field of car driving
and is considered an indicator of attentional deploy-
ment. Finaly, the relevance of such an approach de-
pends on the presentation of situations that are highly
controlled and strictly identical across participants, as
well as the fact that the approach accords the encoun-
tered situations a more ecological nature by offering,
in particular, the possibility of interacting in real time
with the environment in which the subject may be im-
mersed.
The objective of this paper is to present a car driv-
ing simulator currently under development and aimed
at studying the cognitive processes involved in car
driving such as attentional processes and anticipatory
mechanisms. In the next Section, we describe some
existing driving simulators that have been developed
so far and present some related works about visual
attention and eye-movements in driving, load theory
of attention, cognitive control and anticipatory mech-
anisms. Section 3 presents the VEs we have devel-
oped and our driving simulations. In Section 4, we
focus on the measure and analysis of collected eye-
movements. In Section 5, we present our approach
to investigate cognitive processes such as anticipatory
mechanisms in driving simulation. Finally, we will
present our conclusions and suggest avenues for fur-
ther work.
2 RELATED WORK
2.1 Driving Simulators
Nowadays, two types of driving simulators are avail-
able : (1) static simulators, with which the user ex-
periences no acceleration or forces and (2) dynamic
simulators, which are based on motion platforms.
The most advanced static simulators incorporate a
fully instrumented vehicle placed in front of a semi-
cylindrical or multi-screen display. Among these sys-
tems, we can cite the SIM2 simulator from the French
Institute for Sciences and Technologies of Transport,
Development and Networks (IFSTTAR). This simu-
lator incorporates a Citro
¨
en Xantia placed in front of
a three-sided screen (Auberlet et al., 2010). There is
also the Fraunhofer IAO simulator, consisting of a Re-
nault Scenic placed in front of a three-sided screen,
with a 180-degree field of view. Note that this simula-
tor offers two screens behind the vehicle (Marberger,
2008). The simulator developed at the University of
Leeds consists of a Rover 216 and a curved screen
with a 120-degree field of view (Blana and Golias,
2002).
Most dynamic simulators integrate acceleration
feedback via the use of a motion platform. We can
cite for example the SHERPA simulator from PSA
Peugeot-Citro
¨
en, which was duplicated at the LAMIH
Laboratory at the University of Valenciennes. This
simulator, consisting of a Peugeot 206 mounted on
a Rexroth Hydraudyne platform, uses a three-sided
screen with a 180-degree field of view (Younsi et al.,
2009). In the same category, the VERA simulator of
the Technology Environment Safety Transport Lab-
oratory of the University of Naples consists of one
half of a C2 Citro
¨
en, mounted on a six-stage plat-
form of freedom. This vehicle is placed in front of
a screen made up of three faces and has also a 180-
degree field of view. LCD screens in the central
and exterior mirrors provide rearward vision (Torri-
eri et al., 2008). The CARRS-Q (Center for Accident
and Road Safety) Advanced Simulator at the Univer-
sity of Queensland consists of a vehicle placed on a
Rexroth platform. The simulator is equipped with
a three-sided screen with a 18-degree field of view.
LCD screens are placed in both the center and exterior
mirrors to provide rearward vision (Haines, 2011).
Dynamic simulators also include the KMUDS-4 from
Kookmin University in Korea. This simulator con-
sists of a vehicle, a three-sided frontal screen with a
Using Virtual Reality Techniques to Study Cognitive Processes in Car Driving Activity
139

140-degree field of view. The system also has a rear
screen with a 50-degree field of view. The restitution
of movements is carried out by four motors located
under the vehicle (Lee et al., 2007). The Ford VIRT-
TEX simulator uses a vehicle in a dome containing
a cylindrical screen with a 180-degree field of view
and a rear cylindrical screen with a 120-degree field
of view (Artz et al., 2001). The system is mounted on
a platform with six degrees of freedom. In order to re-
produce large-amplitude displacements in one or two
dimensions, the dynamic simulators can be placed on
rails. One-dimensional systems include the MARS
simulator of the IFAS (Institut f
¨
ur Fahrzeugtechnik
und Antriebssystemtechnik, Germany). The rail used
allows a lateral displacement of 1.5 m (Breidenbach
and Tomaske, 2004). There is also the simulator III
of the National Institute for Road and Transport Re-
search in Sweden. The rail used allows a displace-
ment of 7.5 m. Moreover, the cab can be oriented by
90 degrees, making it possible to reproduce longitu-
dinal and lateral movements (Nordmark et al., 2004).
The Daimler simulator consists of a dome contain-
ing a vehicle and a 360 degrees cylindrical screen,
mounted on a platform with six degrees of freedom.
The system uses a rail with an amplitude of move-
ment of 12 m (Zeeb, 2010). The Cards 2 simulator
developed by Renault, also falls into this category. It
is composed of a cabin equipped with a dashboard of
a M
´
egane, integrating a manual gearbox with five ra-
tios. Three screens with a horizontal viewing angle of
150 degrees and a vertical 40-degree field of view are
used. Two LCD screens are placed in the exterior mir-
rors, and the image of the central mirror is projected
onto the top of the center screen. The simulator is
mounted on a platform with six degrees of freedom,
allowing a displacement of ± 20 cm and a rotation
of ± 20 degrees (Reymond and Kemeny, 2000). Re-
nault has also developed the Ultimate Dynamic Sim-
ulator which consists of a cabin equipped with a La-
guna dashboard. The steering wheel is equipped with
an active feedback system, while the pedals and shift
lever are equipped with a passive feedback system.
The images are projected onto a cylindrical screen
having a horizontal 150-degree field of view and a
vertical 40-degree field of view. The NADS-1 sim-
ulator from the University of Iowa has 19.5 m lon-
gitudinal and lateral displacements (Greenberg et al.,
2006). Note that the cabin incorporates a 360 degrees
cylindrical screen.
Some dynamic simulators are based on a specific
architecture for the simulation of movements and ac-
celerations. For example, the CyberMotion simula-
tor from the Max Planck Institute, uses a robot with
six degrees of freedom, on which the driver’s position
and screen are positioned (Grabe et al., 2010). In the
same category, there is the Desdemona simulator of
the TNO (Mayrhofer et al., 2009).
2.2 Visual Attention and
Eye-movements
Vision is the major sense used during the driving
activity (Sivak, 1996). The Human Visual System
(HVS) is able to resolve fine details in a scene, as
well as in a moving sequence, at close and far dis-
tances (Snowden et al., 2006). Over the last two
decades, HVS which lies at the heart of transportation
studies has focused on analyzing visual attention and
gaze tracking (Jacob, 1991; Lemonnier et al., 2014;
Lemonnier et al., 2015). In this context, the trans-
port field has benefited from recent progress in eye-
tracker devices and from the emergence of computa-
tional models of visual attention and a new research
area, i.e., VR.
Although eye tracking technology is susceptible
to data quality issues (Ahlstrom et al., 2012), eye
movements have been widely studied in the context of
driver behavior, attention management, and to assess
task related visual demand (Wierwille., 1993; Mori
et al., 2013; Sodhi et al., 2002; Aoki et al., 2010).
While many eye movement measures are available
today (Holmqvist et al., 2011), some are easier to
calculate than others. The most common eye move-
ment events are fixation and saccade. Fixation corre-
sponds to the period of time the eye remains nearly
still and a saccade is the rapid motion of the eye from
one fixation to another. Analyzing fixation events is
especially interesting in driving studies because it is
widely accepted that individuals are blind during a
saccade. To identify the information that draws the
drivers attention outside the vehicle (e.g. traffic signs,
signals, pavement markings), the prime measures are
those that determine whether the driver is looking at
a particular location or signal referred to as Area of
Interest (AOI). Several characteristics of eye move-
ments such as eye blinks, pupil dilation and saccadic
peak velocity reflect variations in attention, emotion
and mental workload over time.
2.3 Load Theory of Attention and
Cognitive Control
The ability to focus attention on the elements of en-
vironment to be treated in priority and ignore dis-
tractions is essential to the production of adapted be-
haviors. However, this blindness to distractors might
be damaging in some situations, as in the case of
car driving where it is vital to detect the presence
HUCAPP 2017 - International Conference on Human Computer Interaction Theory and Applications
140

of other vehicles and traffic signs (Lavie, 2010, for
a review). The ability to detect distractors during
the execution of a task requiring attention can be ex-
plained by Lavies load theory of attention and cog-
nitive control (Lavie et al., 2004; Lavie and Fock-
ert, 2005; Lavie, 2010). This theory tends to resolve
the debate relative to the locus of attentional selec-
tion (early, late) by introducing the idea that focused
attention in the face of distractions depends both on
the amount and type of information load involved by
the task. The load theory posits that focused atten-
tion is enhanced under conditions of high perceptual
load and degraded in situations involving high load on
cognitive control processes (e.g., working memory).
Indeed, tasks involving high perceptual load consume
the overall processing capacity, leaving no more re-
sources available for the perception of irrelevant dis-
tractors. Such a prediction is in agreement with the
view of early attentional selection, according to which
the individuals perceive only the objects to which they
pay attention because of limited perceptual process-
ing capacity. Conversely, in the case of tasks involv-
ing a low perceptual load, the processing capacity is
not totally used, allowing the processing of distractive
information. This second prediction is in agreement
with the theory of late selection that postulates that
perception refers to an unlimited capacity automatic
process. In this case, the efficiency of attentional se-
lection, which refers to “the extent to which distrac-
tors that have been perceived can be prevented from
gaining control over behavior” (Lavie, 2010, p. 143),
depends on the load on cognitive control processes,
a high working memory load being for instance the
origin of increased interference of distractors.
2.4 Anticipatory Mechanisms
Anticipatory mechanisms involved in the perception
of the surrounding world is at the heart of the produc-
tion of adaptive behavior (Bl
¨
attler et al., 2012), for
instance in the case of car driving. Thus, the abil-
ity to realize predictions concerns both the likely fu-
ture trajectory of a moving object or the likely evo-
lution of the dynamic environment in which the ob-
server is embedded, a phenomenon known as repre-
sentational momentum (Freyd and Finke, 1984) and
the prediction of areas of the environment just out-
side the observers visual field. This phenomenon is
known as boundary extension (Intraub and Richard-
son, 1989) and is described as the tendency to overes-
timate the spatial expanse of a previously perceived
scene, the visual system inferring information that
could be present just beyond the boundaries of a view.
As a result, the observers memory includes extended
boundaries in comparison to the boundaries of the
original scene. While this phenomenon is generally
described as a memory error, it presents an important
adaptive value by facilitating the interactions with the
environment through, for instance, tasks such as nav-
igation (Hale et al., 2016).
Several studies have shown that car driving ex-
pertise modulates boundary extension (M
´
en
´
etrier and
Didierjean, 2013), with experts processing the scenes
belonging to their expertise field more effectively than
novices (Reingold et al., 2001; Mourant and Rock-
well, 1972). However, one of the limitations of these
studies is that they relied on the presentation of road-
scene photographs passively grasped by observers,
whereas car driving implies perceptivo-motor repre-
sentations and abilities (Bl
¨
attler et al., 2012).
3 VIRTUAL ENVIRONMENTS
AND DRIVING SIMULATION
3.1 Virtual Environments
Two complementary VEs have been developed for the
study of cognitive processes (attentional and predic-
tion) and the perceptual mechanisms involved when
one is driving a vehicle. The first is an urban en-
vironment (Fig. 1) composed of buildings arranged
along linear axes and intersections with traffic signs
and traffic lights. Restaurants and caf
´
es were mod-
eled and placed in the streets. Each intersection can be
set according to each experiments needs. The traffic
lights therefore behave realistically and are fully con-
trolled using finite state machines. As shown in Fig-
ure 1, below, a pavement marker is also present (white
and yellow lines on the ground). Vehicles and charac-
ters with realistic autonomous behaviors can also be
placed in the environment. Artificial lights for illumi-
nating the streets and the buildings are also present.
To increase the realism of the simulation, vegetation
was integrated (bushes and trees). These elements can
be animated in real time according to weather condi-
tions (air stream).
Lastly, the VE offers a more or less rich sound-
scape. Depending on the traffic, different audio clips
can be played. By default, the noise generated by the
car engine and the braking is present in the simulation
even though, naturally, it can be cut off. It is worth
noting that sound information increases the realism
of the simulation but is also perceived as an impor-
tant driving aid. The Figure 2, provides a view of the
countryside VE during the driving simulation. This
VE comprises open fields and has minimal vegetation.
During the simulation, however, the driver may pass
through small villages comprising farms and some
Using Virtual Reality Techniques to Study Cognitive Processes in Car Driving Activity
141

Figure 1: A user’s view of the virtual city during the driving
simulation.
Figure 2: A user’s view of the countryside VE during the
driving simulation.
houses. The driver might also pass through a forest
with many trees.
3.2 Driving Simulation
Two driving approaches are proposed: (1) free driv-
ing in which the driver operates the vehicle and has
full dynamic control of simulation parameters (steer-
ing, speed, etc.) and (2) constrained driving in which
the driver has only partial control of the vehicles be-
havior. In the latter case, the vehicle advances on rails
(Fig. 3) and its speed is kept constant. The driver con-
trols when the vehicle starts and when it stops. This
second approach was implemented in order to ensure
that all subjects had the same visual stimuli. With re-
gard to our experiment, we chose to represent neither
the inside (virtual camera positioned in front of the
steering wheel) nor the hood of the vehicle, especially
when the user had two wheels in front of him/her (a
physical one and the virtual one) during the driving
simulation.
Our experimental platform is based on a simple
configuration (Fig. 4) and provides haptic feedback
using the Logitech G27 steering wheel. This de-
vice has the following characteristics: (1) a power-
ful dual-motor force feedback mechanism with heli-
cal gearing, (2) a lever for six-speed engagement of
Figure 3: Example of rails used to constraint the car path.
reverse gear with pressure, (3) the ability to change
speed/tachometer (4) a leather coated wheel with a di-
ameter measuring 28 cm and (5) an accelerator pedal,
steel brake and clutch.
Figure 4: Experimental platform for driving simulation and
eye-tracking.
4 MEASURE AND ANALYSIS OF
EYE-MOVEMENTS
Twenty four (24) participants took part in a driving
simulation experiment based on the driving simula-
tor previously described. The VEs were projected
on a screen 55 cm high and 107 cm wide. Partici-
pants were positionned approximately 170 cm from
the screen, which was placed at a horizontal angle of
view of 35
◦
and a vertical angle of view of 18
◦
. A
RED eye-tracking system from SMI, running at 60
Hz, was used (see Figure 4). The experiment lasted
approximately 30 minutes (ten minutes of free train-
ing, ten minutes in the rural environment and ten min-
utes in the urban environment). Eye movements were
first analyzed using the gaze standard deviation. We
HUCAPP 2017 - International Conference on Human Computer Interaction Theory and Applications
142
posited that the standard deviation would reflect men-
tal workload and would depend on the environment
(rural/urban) (Burnham et al., 2014). The horizontal
standard deviation for the rural environment was 3.4
◦
and the vertical deviation was 3.5
◦
. These weak val-
ues can be explained through the monotonous envi-
ronment along the route and the drivers concentration
on his/her trajectory alone, i.e., concentration on the
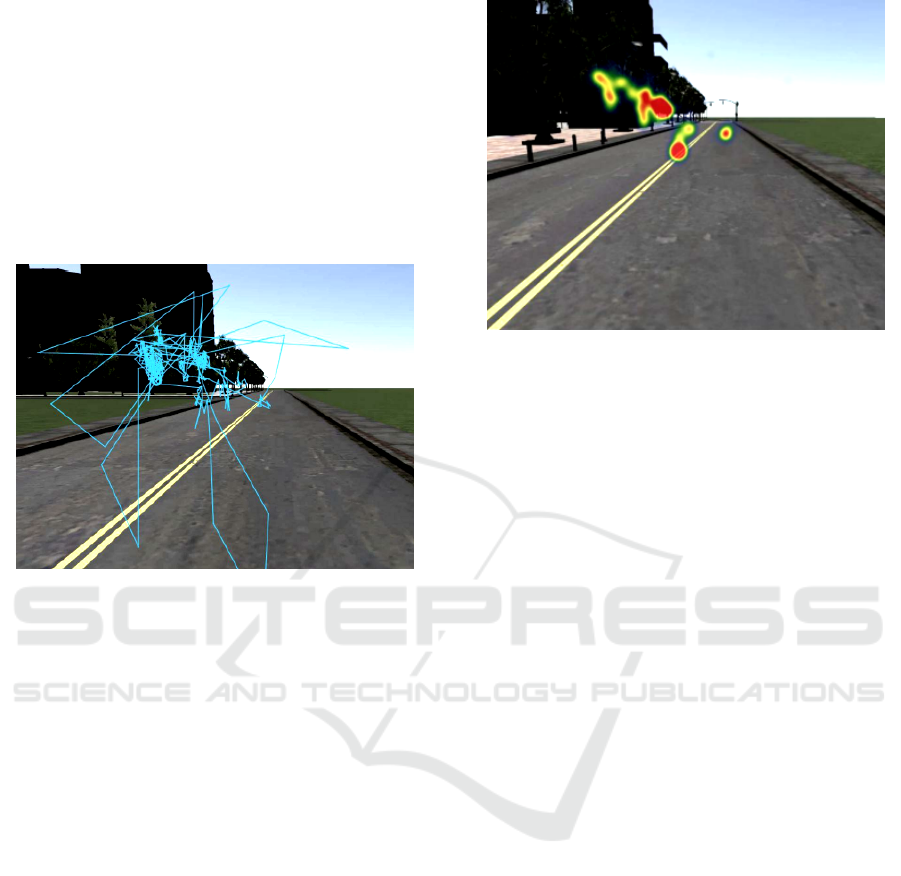
vanishing point. Sample of eye-movement paths and
hot spots during the exploration of the virtual city are
given in Figures 5 and 6 respectively.
Figure 5: Eye-movement paths during the exploration of the
virtual city.
For the urban environment, the horizontal stan-
dard deviation was 7.0
◦
and the vertical deviation
was 3.0
◦
. The vertical/horizontal difference can be
explained through the perspective projection of the
world; while the vertical dimension represents the
perspective, the horizontal dimension is related to a
fixed distance. Gaze exploration (looking at cars, traf-
fic lights, etc.) leads to greater eye movement in a hor-
izontal direction. Scene complexity also increased the
standard deviation. After these findings, we turned
our interest to the utility/distracter ratio (on the road)
and the AOI approach, which requires us to detect the
road in every frame and compare this with the eye
position. To this end, a robust image processing al-
gorithm should be implemented and applied to each
frame of the acquisition movies. These studies are
currently under development will be presented in a
future paper.
5 ANTICIPATORY MECANISMS
IN DRIVING SIMULATION
In addition to the creation of situations closer to those
encountered in natural settings, VR enables to imple-
ment experimental tasks aimed at studying specific
Figure 6: Hot spots during the exploration of the virtual city.
cognitive processes. One of the goals we pursued here
is the study of the anticipatory mechanisms involved
in the perception of the surrounding world. In this
context, the use of VR will enable us to study this
question by proposing a driving task to novice and
expert car drivers, during which they will move in the
virtual city either as drivers (i.e., involved in the driv-
ing action condition) or as passengers (i.e., less in-
volved condition).
To study anticipatory mechanisms in driving, a
boundary extension task will be incorporated at dif-
ferent times: during driving, the scene will be frozen
for a very brief duration (250 ms) before being re-
placed by a black screen (1 s). Immediately after-
wards, the frozen scene will reappear, but the distance
at which it is presented will have been modified. The
task of the subject will be to indicate whether the sec-
ond scene is closer-up, further away, or at the same
distance as the original. In order to present compa-
rable situations from one participant to another (i.e.,
strictly identical scenes), we will use the rail that has
been implemented in order to standardize subjects
paths and viewpoints. This task will enable us to bet-
ter understand the simultaneous effects of expertise
and involvement in the action on boundary extension
and will also enable the immersion of the participants.
This appears to be a fundamental question because, in
real life, human beings are embedded in environments
in which they act toward goals.
6 CONCLUSION AND FUTURE
WORK
We have presented a car driving simulator aimed
at studying the cognitive processes involved in car
driving such as attentional processes and anticipatory
Using Virtual Reality Techniques to Study Cognitive Processes in Car Driving Activity
143

mechanisms. To this aim, specific experimental tasks
have been developped. The proposed experimental
platform is equipped with an eye-tracking system to
collect specific eye movement data. Despite the gap
between the real and the virtual world, VR is an inter-
esting compromise between highly controlled experi-
mental situations and studies undertaken in a natural
setting. Indeed, VR makes it possible to associate a
controlled study of cognitive processes with situations
closer to everyday life by enabling an interaction with
the environment. In future, we plan to add more sen-
sors to get additional data such as physiological data
(EMG, ECG, and GSR) for a more in-depth analysis
of users behavior and performance.
REFERENCES
Ahlstrom, C., Victor, T., Wege, C., and Steinmetz, E.
(2012). Processing of eye/head tracking data in large-
scale naturalistic driving data sets. IEEE Transactions
on Intelligent Transportation Systems, 13(2):553–564.
Aoki, H., Nakayasu, H., Kondo, N., and Miyoshi, T. (2010).
Cognitive study on drivers behavior by vehicle trajec-
tory and eye movement in virtual environment. In Pro-
ceedings of the 3
rd
International Conference on Ap-
plied Human Factors and Ergonomics, pages 6768–
6777.
Artz, B., Cathey, L., Grant, P., Houston, D., and Greenberg,
J. (2001). The design and construction of the visual
subsystem for virttex, the driving simulator at the ford
research laboratories. In Proceedings of Driving Sim-
ulation Conference, pages 69–79.
Auberlet, J., Pacaux, M., Anceaux, F., Plainchault, P., and
Rosey, F. (2010). The impact of perceptual treat-
ments on lateral control: A study using fixed-base and
motion-base driving simulators. Accident Analysis &
Prevention, 42(1):166–173.
Bian, D., Wade, J., Swanson, A., Warren, Z., and Sarkar,
N. (2015). Physiology-based affect recognition during
driving in virtual environment for autism intervention.
In Proceedings of the 2Nd International Conference
on Physiological Computing Systems, PhyCS 2015,
pages 137–145, Portugal. SCITEPRESS - Science and
Technology Publications, Lda.
Bian, D., Wade, J. W., Zhang, L., Bekele, E., Swanson,
A., Crittendon, J. A., Sarkar, M., Warren, Z., and
Sarkar, N. (2013). A novel virtual reality driving en-
vironment for autism intervention. In Proceedings
of the 7th International Conference on Universal Ac-
cess in Human-Computer Interaction: User and Con-
text Diversity - Volume 2, UAHCI’13, pages 474–483,
Berlin, Heidelberg. Springer-Verlag.
Blana, E. and Golias, J. (2002). Differences between vehi-
cle lateral displacement on the road and in a fixed-base
simulator. Human Factors, 44:303–313.
Bl
¨
attler, C., Ferrari, V., Didierjean, A., and Marm
`
eche, E.
(2012). Role of expertise and action in motion ex-
trapolation from real road scenes. Visual Cognition,
20(9):988 – 1011.
Breidenbach, C. and Tomaske, W. (2004). The use of
driving simulators in simulating the on-road drive of
wheeled vehicles. In Proceedings of Driving Simula-
tion Conference, pages 333–341.
Burnham, B. R., Sabia, M., and Langan, C. (2014). Com-
ponents of working memory and visual selective at-
tention. Journal of Experimental Psychology: Human
Perception and Performance, 40(1):391–403.
Crundall, D., Chapman, P., and Underwood, G. (2003). Eye
movements and hazard perception in police pursuit
and emergency response driving. Journal of Exper-
imental Psychology: Applied, 9:163–174.
Freyd, J. J. and Finke, R. A. (1984). Representational
momentum. Journal of Experimental Psychology:
Learning, Memory and Cognition, 10:126 – 132.
Galpin, A., Underwood, G., and Crundall, D. (2009).
Change blindness in driving scenes. Transportation
Research (Part F), 12:179–185.
Grabe, V., Pretto, P., Giordano, P. R., and Bultho, H. H.
(2010). Infuence of display type on drivers perfor-
mance in a motion based driving simulator. In Pro-
ceedings of Driving Simulation Conference, pages 81–
88.
Graydon, F. X., Young, R., Benton, M. D., Genik, R., Posse,
S., Hsieh, L., and Green, C. (2004). Visual event de-
tection during simulated driving: Identifying the neu-
ral correlates with functional neuroimaging. Trans-
portation Research (Part F), 7:271–286.
Greenberg, J., Curry, R., Blommer, M., Kozak, K., Artz, B.,
Cathey, L., and Kao, B. (2006). The validity of last-
second braking and steering judgments in advanced
driving simulators. In Proceedings of Driving Simula-
tion Conference, pages 143–153.
Haines, A. (2011). The carrs-q advanced driving simulator.
In Road Safety Forum 2011: Directions in Road Safety
Research.
Hale, R. G., Brown, J., and McDunn, B. A. (2016). Increas-
ing task demand by obstructing object recognition in-
creases boundary extension. Psychonomic Bulletin &
Review, 23:1497–1503.
Holmqvist, K., Nystrom, M., Andersson, R., Dewhurst, R.,
Jarodzka, H., and van de Weijer, J. (2011). Eye Track-
ing: A comprehensive guide to methods and measures.
Oxford University Press, Oxford, United-Kingdom.
Intraub, H. and Richardson, M. (1989). Wide-angle memo-
ries of close-up scenes. Journal of Experimental Psy-
chology: Learning, Memory and Cognition, 15:179–
196.
Jacob, R. (1991). The use of eye movements in human-
computer interaction techniques: what you look at is
what you get. ACM Transactions on Information Sys-
tems (TOIS), 9(2):152–169.
Lavie, N. (2010). Attention, distraction and cognitive con-
trol under load. Journal of Eye Movement Research,
19(3):143–148.
Lavie, N. and Fockert, J. D. (2005). The role of working
memory in attentional capture. Psychonomic Bulletin
& Review, 12:669674.
HUCAPP 2017 - International Conference on Human Computer Interaction Theory and Applications
144

Lavie, N., Hirst, A., Fockert, J. D., and Viding, E. (2004).
Load theory of selective attention and cognitive con-
trol. Journal of Experimental Psychology: General,
133:339354.
Lee, W. S., Sung, D. H., Lee, J. Y., Kim, Y. S., and
Cho, J. H. (2007). Driving simulation for evaluation
of driver assistance systems and driving management
systems. In Proceedings of Driving Simulation Con-
ference North America, pages 153 – 161.
Lei, M., Meng, G., Zhang, W., Wade, J., and Sarkar, N.
(2016). Brain gamma oscillations of healthy peo-
ple during simulated driving. In Proceedings, Part
II, of the 9th International Conference on Intelligent
Robotics and Applications - Volume 9835, ICIRA
2016, pages 453–458, New York, NY, USA. Springer-
Verlag New York, Inc.
Lemonnier, S., Br
´
emond, R., and Baccino, T. (2014). Dis-
criminating cognitive processes with eye movements
in a decision-making driving task. Journal of Eye
Movement Research, 7(4):1–14.
Lemonnier, S., Br
´
emond, R., and Baccino, T. (2015). Gaze
behavior when approaching an intersection: Dwell
time distribution and comparison with a quantitative
prediction. Transportation Research (Part F): Trac
Psychology and Behaviour, 35:60–74.
Marberger, C. (2008). Absolute and perceived validity of
the fraunhofer iao immersive driving simulator. In
Proceedings of Driving Simulation Conference, pages
195 – 203.
Mayrhofer, M., Schlusselberger, J. S. R., Wentink, M., and
Bles, W. (2009). Optimal motion control of next gen-
eration simulator motion platform desdemona for car
driving application. In Proceedings of Driving Simu-
lation Conference, pages 173–199.
M
´
en
´
etrier, E. and Didierjean, A. (2013). Can car driving ex-
pertise modulate boundary extension? L’ann
´
ee Psy-
chologique :Topics in Cognitive Psychology, 113:523
– 545.
Mori, M., Nakayasu, H., and Miyoshi, T. (2013). Synchro-
nized analyses of eye movement of driver and vehicle
trajectories using driving simulator and eye tracking
system. Transaction of the Japan Society of Mechani-
cal Engineering (Series C), 79(803):2408–2423.
Mourant, R. R. and Rockwell, T. H. (1972). Strategies of
visual search by novice and experienced drivers. Hu-
man Factors, 14:325–335.
Nordmark, S., Jansson, H., Palmkvist, G., and Sehammar,
H. (2004). The new vti driving simulator, multipur-
pose moving base with high performance linear mo-
tion. In Proceedings of Driving Simulation Confer-
ence, pages 45–55.
Reingold, E., Charness, N., Schultetus, R., and Stampe, D.
(2001). Perceptual automaticity in expert chess play-
ers: Parallel encoding of chess relations. Psychonomic
Bulletin and Review, 8:504 – 510.
Reymond, G. and Kemeny, A. (2000). Motion cueing in the
renault driving simulator. Vehicle System Dynamics,
34:249–259.
Rizzo, M. (2002). An abstract virtual environment tool to
assess decision-making in impaired drivers. In Pro-
ceedings of the Second International Driving Sympo-
sium on Human Factors in Driver Assessment, Train-
ing and Vehicle Design. J. D. Lee, M. Rizzo & D. V.
McGehee (Eds.).
Sivak, M. (1996). The information that drivers use: Is it
indeed 90% visual? Perception, 25(9):1081 – 1089.
Snowden, R. J., Thompson, P., and Troscianko, T. (2006).
Basic vision: An introduction to visual perception.
Oxford University Press, Oxford, United-Kingdom.
Sodhi, M., Reimer, B., and Llamazares, I. (2002). Glance
analysis of driver eye movements to evaluate distrac-
tion. Behavior Research Methods, Instruments, &
Computers, 34(4):529–538.
Torrieri, V., D’Apuzzo, M., Galante, F., Pernetti, M.,
Ganieux, D., Troale, A., and Gall
´
ee, G. (2008). Ef-
fects of road pavement profilles on driver behaviour
in the test driving simulator. In Proceedings of Driv-
ing Simulation Conference, pages 147–159.
Underwood, G., P, . C., Brocklehurst, N., Underwood, J.,
and Crundall, D. (2003). Visual attention while driv-
ing: Sequences of eye fixations made by experienced
and novice drivers. Ergonomics, 46:629 – 646.
Wierwille., W. W. (1993). An initial model of visual sam-
pling of in-car displays and controls. Vision in vehi-
cles, 4:271–282.
Younsi, K., Floris, J., Rajaonah, B., Simon, P., Loslever, P.,
and Popieul, J.-C. (2009). Study of driver’s behavior
during overtaking situations. In Proceedings of Inter-
national Conference on Road Safety and Simulation,
Paris, France.
Zeeb, E. (2010). Daimler’s new full-scale high-dynamic
driving simulator - a technical overview. In Proceed-
ings of Driving Simulation Conference, pages 157–
165.
Zhang, L., Wade, J., Swanson, A., Weitlauf, A., Warren,
Z., and Sarkar, N. (2015). Cognitive state measure-
ment from eye gaze analysis in an intelligent vir-
tual reality driving system for autism intervention.
In Proceedings of the 2015 International Conference
on Affective Computing and Intelligent Interaction
(ACII), ACII’15, pages 532–538, Washington, DC,
USA. IEEE Computer Society.
Using Virtual Reality Techniques to Study Cognitive Processes in Car Driving Activity
145
