
Change Detection in Crowded Underwater Scenes
Via an Extended Gaussian Switch Model Combined with a Flux Tensor
Pre-segmentation
Martin Radolko, Fahimeh Farhadifard and Uwe von Lukas
Institute for Computer Science, University Rostock, Rostock, Germany
Fraunhofer Institute for Computer Fraphics Research IGD, Rostock, Germany
{Martin.Radolko, Fahimeh.Farhadifard}@uni-rostock.de, Uwe.Freiherr.von.lukas@igd-r.fraunhofer.de
Keywords:
Change Detection, Background Subtraction, Video Segmentation, Video Segregation, Underwater
Segmentation, Flux Tensor.
Abstract:
In this paper a new approach for change detection in videos of crowded scenes is proposed with the extended
Gaussian Switch Model in combination with a Flux Tensor pre-segmentation. The extended Gaussian Switch
Model enhances the previous method by combining it with the idea of the Mixture of Gaussian approach and
an intelligent update scheme which made it possible to create more accurate background models even for
difficult scenes. Furthermore, a foreground model was integrated and could deliver valuable information in
the segmentation process. To deal with very crowded areas in the scene – where the background is not visible
most of the time – we use the Flux Tensor to create a first coarse segmentation of the current frame and only
update areas that are almost motionless and therefore with high certainty should be classified as background.
To ensure the spatial coherence of the final segmentations, the N
2
Cut approach is added as a spatial model
after the background subtraction step. The evaluation was done on an underwater change detection datasets
and showed significant improvements over previous methods, especially in the crowded scenes.
1 INTRODUCTION
The detection of objects in videos has already a long
history in computer vision but still is a very relevant
topic today due to new developments such as self driv-
ing cars or robot aided production which demand a
detection in real time and with high precision. In this
paper, we address the specific topic of the segregation
of a video into two parts, the static background and
the moving foreground. This is an important first step
in a computer vision pipeline since moving objects are
almost always the most interesting part of a scene. For
example, if a car or robot has to avoid collisions, then
the objects that are moving pose the highest threat and
knowledge about their exact position and direction of
movement is mandatory.
1
To detect these moving objects we assume a static
camera, so that stationary objects also appear station-
ary in the video. This makes it possible to create a
model of the static background of the scene, e.g. with
1
This research has been supported by the German Federal
State of Mecklenburg-Western Pomerania and the Euro-
pean Social Fund under grant ESF/IV-BMB35-0006/12]
statistical methods, and every object that does not fit
the model is therefore labeled as a moving object. In
recent years many of these background modeling and
subtraction algorithms have been proposed, but as the
tasks and applications of these methods are as plen-
tiful as the suggested algorithms there is still a lot of
research to be done.
In this paper, we focus on crowded scenes which
pose a particularly difficult task for background sub-
traction algorithms since the permanent exposure to
foreground objects often leads to an adaption of the
background model to these foreground objects, es-
pecially when they are all similar in color like the
fishes in a swarm. To cope with this we introduce
pre-segmentations created with a Flux Tensor-based
optical flow which are used to exclude parts of the
current frame from the updating process of the back-
ground model. These parts are very likely to be fore-
ground since they are in motion and therefore exclud-
ing them limits the background modeling to the back-
ground parts of the scene.
Furthermore, we enhance the Gaussian Switch
Model approach proposed in (Radolko and Gutzeit,
2015) with the Mixture of Gaussian idea, a fore-
Radolko M., Farhadifard F. and Lukas U.
Change Detection in Crowded Underwater Scenes - Via an Extended Gaussian Switch Model Combined with a Flux Tensor Pre-segmentation.
DOI: 10.5220/0006258504050415
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 405-415
ISBN: 978-989-758-225-7
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
405

ground model and an intelligent updating scheme to
make it overall more robust for difficult scenarios.
The foreground model proved to be particularly use-
ful in the scenes with fish swarms because the dif-
ference between the different foreground objects was
minor and thereby the time for the model to adapt to a
new object was negligible. Lastly, since the approach
so far is solely pixel-based, a spatial component was
added to make the segmentations coincide with the
edges in the frame and better conform to the smooth-
ness of natural images.
2 STATE OF THE ART
Background modeling and subtraction has been used
in computer vision for a long time already. The first
approaches date back to the beginning of the 90ths
(Ridder et al., 1995; Shelley and Seed, 1993) and
commercial applications followed soon. An exam-
ple is the Patent (Gardos and Monaco, 1999), where
background subtraction is used for video compres-
sion.
The most frequently used approaches in recent
years have been statistical methods that use gaussians
to model each pixel of the background. It started
with the Single Gaussian approach (Wren et al., 1997)
where one Gaussian distribution is used to describe
one pixel value. They are usually updated with a run-
ning gaussian:
m
t+1
= αm
t
+ (1 − α)p. (1)
Here m
t
is the mean of the gaussian at the time
step t,p is the pixel value taken from the current frame
and α ∈ (0,1) is the update rate.
However, this simple method is not sufficient to
model difficult scenes – e.g. permanent exposure to
many foreground objects or slightly moving back-
ground objects – and therefore in (Stauffer and Grim-
son, 1999) an algorithm was proposed which does
not use only one gaussian but a mixture of several
gaussians. This proved to be a very effective way
of modeling the background and is henceforth used
with great success in combination with other meth-
ods. Together with a Markov Random Field the Mix-
ture of Gaussian (MoG) is used in (Schindler and
Wang, 2006) and can generate great results on the
Wallflower dataset. In conjunction with an optical
flow, the Flux Tensor, it is used in (Wang et al., 2014)
and achieves state of the art results on the changede-
tection.net dataset.
The Sample Consensus methods take another ap-
proach by keeping a set of samples for each pixel po-
sition instead of modeling the color of that pixel di-
rectly in a probability distribution. The ViBe algo-
rithm (Barnich and Droogenbroeck, 2011) is one ex-
ample for this class, it updates the samples for each
pixel randomly so that even old values can have an
influence on the current segmentation (although with
a decreasing probability). Furthermore, the updating
process diverges spatially so that an update of one
sample can influence the neighbouring samples which
makes the model spatially coherent to some degree.
The segmentation itself is done by counting the num-
ber of values that agree with the current value, which
means that they are closer to the value than a specific
threshold. If enough samples agree with the current
pixel, it is assumed to be background.
The approach of (St-Charles et al., 2015) is similar
to that but does not store the pixel values directly but
rather in a feature vector based on Local Binary Sim-
ilarity Patterns (LBSP) that describes the pixel and its
neighbourhood. Furthermore, they used a sophisti-
cated scheme to adapt their parameters to the current
situation based on a regional classification. Their seg-
mentation quality and runtime can compete with state
of the art approaches .
A non-parametric algorithm is proposed in
(Zivkovic and Heijden, 2006) by using a k-Nearest
Neighbors approach and a good implementation of
this is freely available in the OpenCV library. In
(Marghes et al., 2012; Hu et al., 2011) the Prin-
cipal Component Analysis (PCA) is used to extract
the background of a video and the non-negative ma-
trix factorization was used similarly in (Bucak et al.,
2007). However, these subspace approaches can gen-
erally not achieve results equivalent to the aforemen-
tioned methods and are also often computationally
very expensive. A background model based on a
Wiener Filter in conjunction with a regional approach
which smooths the segmentation and adapts it to the
edges of the current frame was introduced in (Toyama
et al., 1999). Also, there is mechanism that monitors
the whole frame to find global changes, e.g. a light
that is switched off and makes the whole scene appear
dark.
There are also approaches which automatically
combine whole segmentations of various methods in
a way that the output is better than each individual
input. Examples are (Mignotte, 2010), which used a
Bayesian Model and a Rand Estimator to fuse differ-
ent segmentations, or (Warfield et al., 2004) which ap-
plies Markov Random Fields to fuse segmentations of
medical images. A quite current approach is (Bianco
et al., 2015) which uses the large database of different
segmentations of the changedetection.net dataset and
combines the best performing of them. The fusion
process itself is not done by a Bayesian Model, like
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
406

in the other cases, but with a genetic algorithm. The
genetic algorithm has the segmentations and a set of
functions it can apply on them and tries to find the best
combination. These functions are e.g. morphological
erosion or dilation, logical AND or OR operations or
a majority vote on the binary segmentations.
In this way they can improve the already very
good results of the top algorithms. However, to
run their genetic algorithm groundtruth data is nec-
essary and therefore they use one video of each cate-
gory (and the corresponding groundtruth data) to find
the best combination of segmentations and functions.
They can achieve better results than all the existing
algorithms with this approach but the need of sev-
eral already good segmentation results and known
groundtruth data for the training phase makes this ap-
proach impractical.
3 PROPOSED APPROACH
The proposed method consists of three steps. The first
step is explained in the sections one and two where
we describe the Gaussian Switch Model (GSM) and
introduce our extension of it. In the next section we
derive segmentations based on the Flux Tensor and
use them to improve the background modeling pro-
cess of the extended GSM. The last step in section
four is a spatial approach which adapts the segmented
objects of the background subtraction to the edges in
the image by using a NCut based approach.
3.1 Gaussian Switch Model
The GSM was introduced in (Radolko and Gutzeit,
2015) and models the background of the scene with
two distinct gaussian models for each pixel in the
video. Of these two models, one is updated conser-
vatively (only parts classified as background are up-
dated) and one is updated blindly (the whole image is
updated) which allows the method to benefit from the
advantages of both strategies.
The conservative strategy has the problem that
rapid changes of the background will not get incor-
porated into the model, an example of this would be a
car that parks and therefore, after some time, should
become a part of the background model. The blind
update strategy, on the other hand, has the problem
that the foreground objects get included into the back-
ground model as well and especially in scenes with a
constant presences of foreground objects this can lead
to a corrupted background model.
The GSM now has models with both of these up-
dating strategies and normally the one with the con-
servative updating strategy is used for the background
subtraction because it creates a clearer and more ac-
curate background model in most situations. How-
ever, scenes in which the conservative update model
fails can be detected by a comparison of both mod-
els and if such a situation is detected, then the model
is switched from the conservative updated one to the
model which was blindly updated. A depiction of the
effect of these different strategies can be seen in Fig-
ure 1.
Another omnipresent problem in background sub-
traction is shadow, to make the approach more robust
against changes of the lightning a special color space
is used. The conversion is done with the following
equation
I = R + B + G,
C
1
= R/I,
C
2
= B/I.
(2)
Afterwards the intensity I is scaled with the factor
1
3·255
so that all values are in the range [0,1]. The
values C
1
and C
2
only contain color information and
should not change if a shadow appears or the lightning
conditions of the scene change.
3.2 Extension of the GSM
We propose an extension of the GSM background
modeling method by superimposing it with the Mix-
ture of Gaussian idea. This makes the whole approach
more complex and slower but also can increase the
accuracy further, especially in difficult situations like
the underwater scenes we use for evaluation later.
Instead of using two Single Gaussian models we
apply two Mixture of Gaussian models and update
one of them conservatively and one blindly. Also, we
added a foreground model with a high adaption rate to
quickly adapt to different moving objects in the scene.
We chose a simple single gaussian model for this be-
cause it should not model different foreground objects
at the same time but only the most recent one.
Each Mixture of Gaussian (MoG) consists of a
variable number of gaussians (we used five) and each
of them is described by three values: mean m, vari-
ance v and weight w. The mean and variance de-
scribe the shape of the probability distribution and
the weight is a measure of how much data supports
this gaussian. To be considered as a part of the back-
ground model a minimum weight is necessary, oth-
erwise the gaussian is assumed to belong to a fore-
ground object which only appeared shortly in the
video. We define the minimum weight as a percent-
age of the sum over all weights of a MoG and set the
percentage to 1/#gaussians, so one fifth in our case.
Change Detection in Crowded Underwater Scenes - Via an Extended Gaussian Switch Model Combined with a Flux Tensor
Pre-segmentation
407

Figure 1: Comparison of different update schemes for the background modeling. In the top row are the first and 2000th frame
of the Town Center video from (Benfold and Reid, 2011). In the next row are three background models for the 2000th frame of
the video created with the same parameters but different updating mechanisms: the first was created with the GSM approach,
the second with a purely conservative updating scheme and the last one with a blind update for every frame. The conservative
model still has many artefacts from the first frame as they were always marked as foreground and therefore never updated.
The blind update creates a model corrupted with foreground information from the recent frames and only the combination of
them in the GSM could create an accurate background model. The last row shows the corresponding segmentation for every
model.
The MoGs are updated by first searching for the
gaussian that matches the current data the best and
then applying the standard running gaussian update
on them. For a pixel x with pixel value p
x
and update
rate α the equations would be the following
v
x
= α · v
x
+ (1 − α) · (m
x
− p
x
)
2
,
m
x
= α · m
x
+ (1 − α) · p
x
,
w
x
= w
x
+ 1.
(3)
The α value is specified dynamically according to the
weight value of the gaussian in the following way
α =
1
w
x
(4)
but it is capped at 0.5. Furthermore, to prevent an
overflow of the weight value and limit the impact of
old values on the model, there is a decay of all weight
values in the MoG.
Together, this ensures that gaussians which until
now only got very few datapoints to back them up or
only old datapoints which are not reliable anymore
adapt quickly to new values. At the same time, gaus-
sians which were updated frequently (and therefore
have a high weight) will get a small α and are not
strongly effected by single outliers. Consequently, the
decay factor has a strong impact on the update rate,
especially in longer videos, and is therefore the most
important parameter. Empirically we choose it to be
0.995 in our experiments, that means the sum of all
weights in a MoG will tend to 200 for longer periods.
If no matching gaussian could be found in the ex-
isting MoG model a new gaussian will be created with
the values m
x
= p
x
, v
x
= 0.01 and w
x
= 1. Should
there already exist the maximum number of gaussians
that are allowed, the gaussian with the lowest weight
will be deleted and replaced with the new one.
The foreground model is also updated as a run-
ning gaussian but with a fixed α
F
value as there is no
weight value in the Single Gaussian model. Also, the
update rate should be higher than in the background
models so that it can adapt quickly to new foreground
objects. We set it to α
F
= 0.64 for our experiments.
Nonetheless, before the updating process of the model
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
408
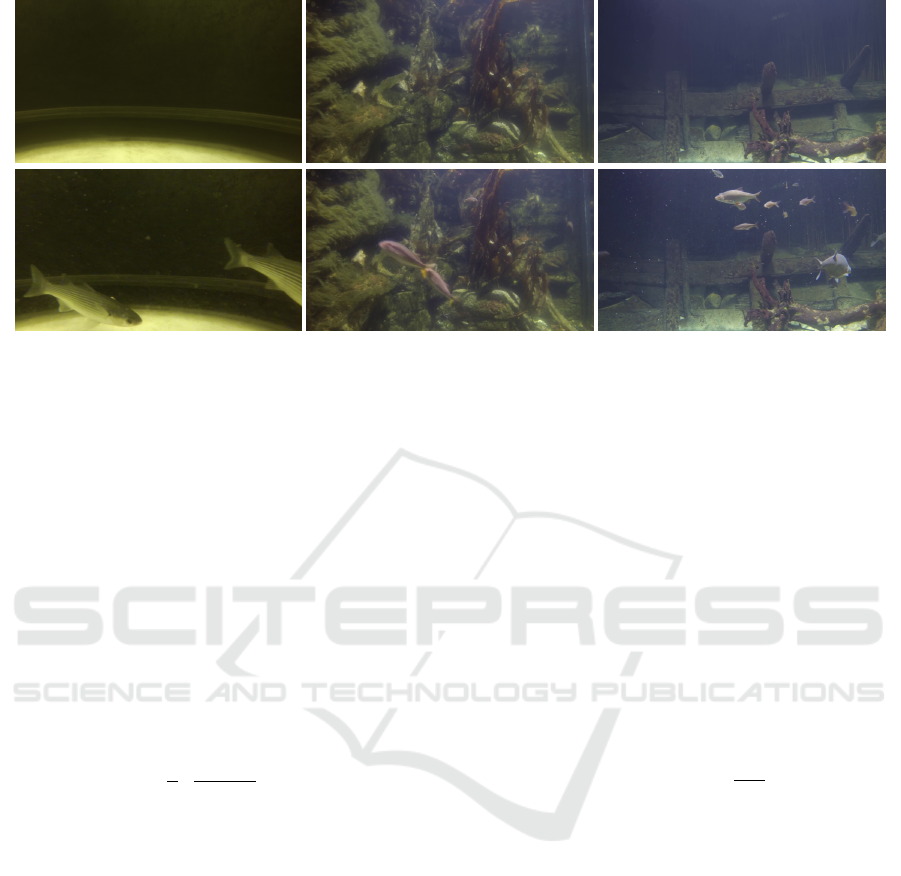
Figure 2: The top row depicts three background models created with the extended GSM and below that are the corresponding
original frames from the video. The background models are visualized by taking the gaussian with the highest weight of the
conservatively updated MoG and displaying the mean of it.
starts, the segmentation has to be done with the exist-
ing model and based on this result the different mod-
els will get modified accordingly.
The blindly updated MoG is updated every time
regardless of the segmentation result. The conserva-
tive MoG only gets updated when a pixel was clas-
sified as background and the foreground model obvi-
ously only when the pixel was marked as foreground.
The segmentation itself is created by comparing the
current frame with the two MoGs. However, only the
gaussians that have a weight that exceeds the mini-
mum weight (one fifth of the overall weight) are con-
sidered part of the background model. If for any of
these gaussians the inequality
exp
−
1
β
·
¯p
x
− ¯m
x
¯v
x
2
2
> 0.5 (5)
is true, the pixel value and the MoG are classified as
a match. The vectors ¯p
x
, ¯m
x
and ¯v
x
contain the val-
ues of the three channels of the pixel x and the opera-
tions between them are all elementwise. The variance
as a divisor makes the thresholding process adaptive,
so that it is less sensitive if the video contains few
noise and vice versa. The value β in the inequality is
a parameter controlling the general sensitivity of the
approach and we set it with 0.5 quite low since the
foreground objects in our data are often quite similar
to the background and therefore a high sensitivity is
necessary.
If the pixel matches with gaussians in both MoGs,
it will be classified as background. However, if it only
matches with one of the MoGs the foreground model
is taken as a tiebreaker. The foreground model is com-
pared to the pixel value according to the inequality (5)
and if it matches the pixel it is marked as foreground,
otherwise as background.
Similar to the original GSM algorithm, there is a
switching between the conservatively updated MoG
and the blindly updated MoG to compensate for the
weaknesses of conservative updating scheme. Such a
switch should occur when there is something in the
scene which is static and constantly classified as fore-
ground, because then, with a high probability, an error
in the background modeling happened and should be
corrected.
To detect such an error the first condition is that
the blindly updated MoG and the foreground model
are similar since this indicates that this pixel has been
mainly classified as foreground in the recent past. The
models are considered similar if
m
BG,k
− m
FG
<
v
FG
2
(6)
holds for all three channels of a pixel. Here m
BG,k
is
the mean of the k-th gaussian of the conservatively up-
dated MoG and it is sufficient if the inequality is true
for one of the gaussians of a pixel. This similarity
could also occur when there appear many foreground
objects in a short period of time. To filter these events
out the variance can be used since foreground objects
usually generate higher variations in the image due
to their movement. Hence the second conditions is
a small variance and the threshold is set to the me-
dian of all variances of the completely updated MoG.
If both of these conditions are fullfilled (inequality 6
and small variance) an error in the conservatively up-
dated MoG is very probable and therefore the blindly
updated MoG is used in these cases.
Lastly, it can occur that two gaussians in one MoG
get very similar over time. These gaussians then
should be unified as they are modeling the same ob-
ject. The similarity is checked with
Change Detection in Crowded Underwater Scenes - Via an Extended Gaussian Switch Model Combined with a Flux Tensor
Pre-segmentation
409
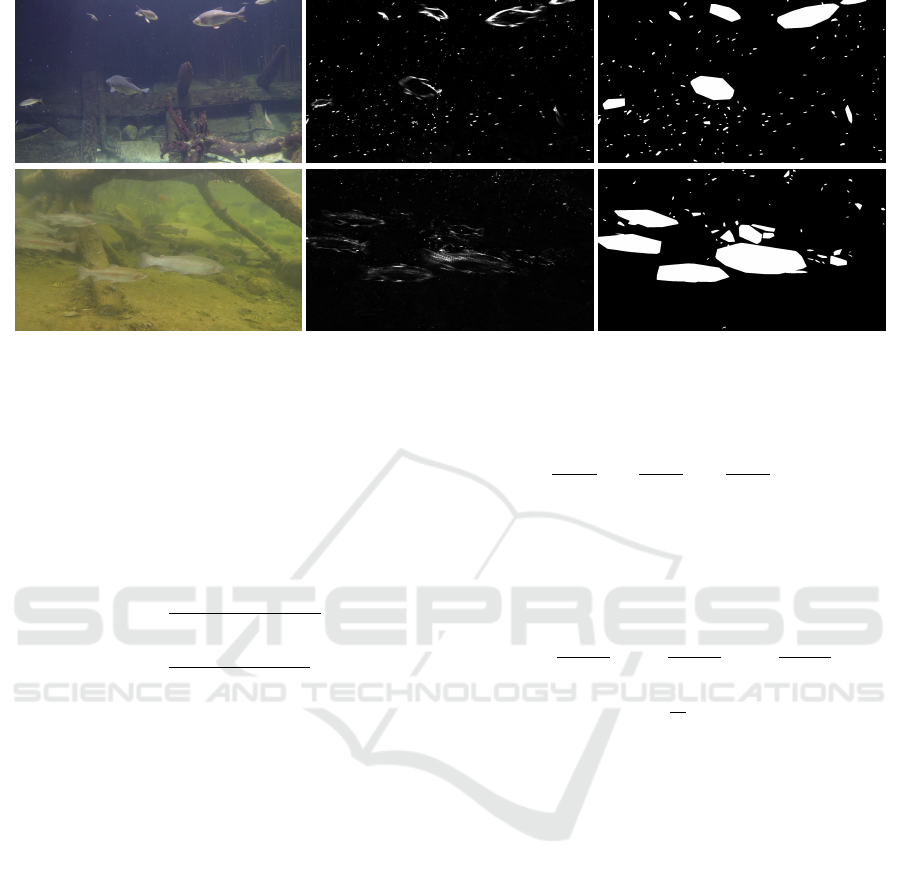
Figure 3: The Flux Tensor on two examples with fishes as moving objects. The images in the middle show the result of
the actual Flux Tensor, higher intensities depict higher movement. On the right side is the segmentation after clustering and
building a convex hull around the foreground clusters. The noise, especially in the upper example, is due to the Marine Snow
which are small floating particles.
k ˜m
G1
− ˜m
G2
k
2
2
< min(k ˜v
G1
k
2
2
,k ˜v
G2
k
2
2
) (7)
and if the inequality holds, the old gaussians are
deleted and a new gaussian is created with the fol-
lowing values
m
new
=
w
G1
m
G1
+ w
G2
m
G2
w
G1
+ w
G2
,
v
new
=
w
G1
v
G1
+ w
G2
v
G2
w
G1
+ w
G2
,
w
new
= w
G1
+ w
G2
.
(8)
Altogether, this extension of the standard GSM leads
to a robust and accurate model building process since
now several different objects can be represented by
the model at the same time and the update rate adapts
itself automatically based on the confidence the model
has in the data. Three examples of modeled back-
grounds can be seen in Figure 2.
3.3 Flux Tensor as a Pre-segmentation
Two dimensional structure tensors have been widely
used for edge and corner detection in images, e.g. in
(Nath and Palaniappan, 2005). They use the infor-
mation of derivates of the images and are applied as
filters on the image which makes them computation-
ally very efficient. Motion information can be recov-
ered in a similar way, but then there has to be a three
dimensional tensor which is applied on an image vol-
ume of a video.
For the location p = (x,y,t) in an image volume
the optical flow v(p) = [v
x
,v
y
,v
t
] is usually computed
with the formula
∂I(p)
∂x
v
x
+
∂I(p)
∂y
v
y
+
∂I(p)
∂t
v
t
= 0 (9)
which leads to an eigenvalue problem that is costly
to solve. To extract the valuable motion information
without solving the eigenvalue problem the flux ten-
sor was proposed in (Bunyak et al., 2007) and is de-
fined by
Z
p∈Ω
∂
2
I(p)
∂x∂t
2
+
∂
2
I(p)
∂y∂t
2
+
∂
2
I(p)
∂t∂t
2
dz
=
Z
p∈Ω
k
∂
∂t
∇I(p)k
2
dz,
(10)
for the pixel p and a small area Ω around it. By com-
puting the Flux Tensor one value per pixel is obtained
which represents the magnitude of motion in that area
(but not the direction of the movement) and this can
be thresholded to get a binary segmentation.
However, when objects are uniform, the Flux Ten-
sor did have difficulties segmenting the interior of the
objects and often only detected the edges as moving.
To cope with this behaviour we use a density-based
spatial clustering after the thresholding and then cre-
ate a convex hull around these clusters of foreground
detections. This method can detect moving objects
very reliable but the created segmentation does not
reflect the actual shape of the objects very well. Two
examples of both steps of the algorithm can be seen
in Figure 3.
Although these segmentations are in general not
as accurate as those derived from a background sub-
traction approach they have the advantage to be avail-
able without a learning phase which can be very use-
ful. The extended GSM has a very elaborated learning
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
410
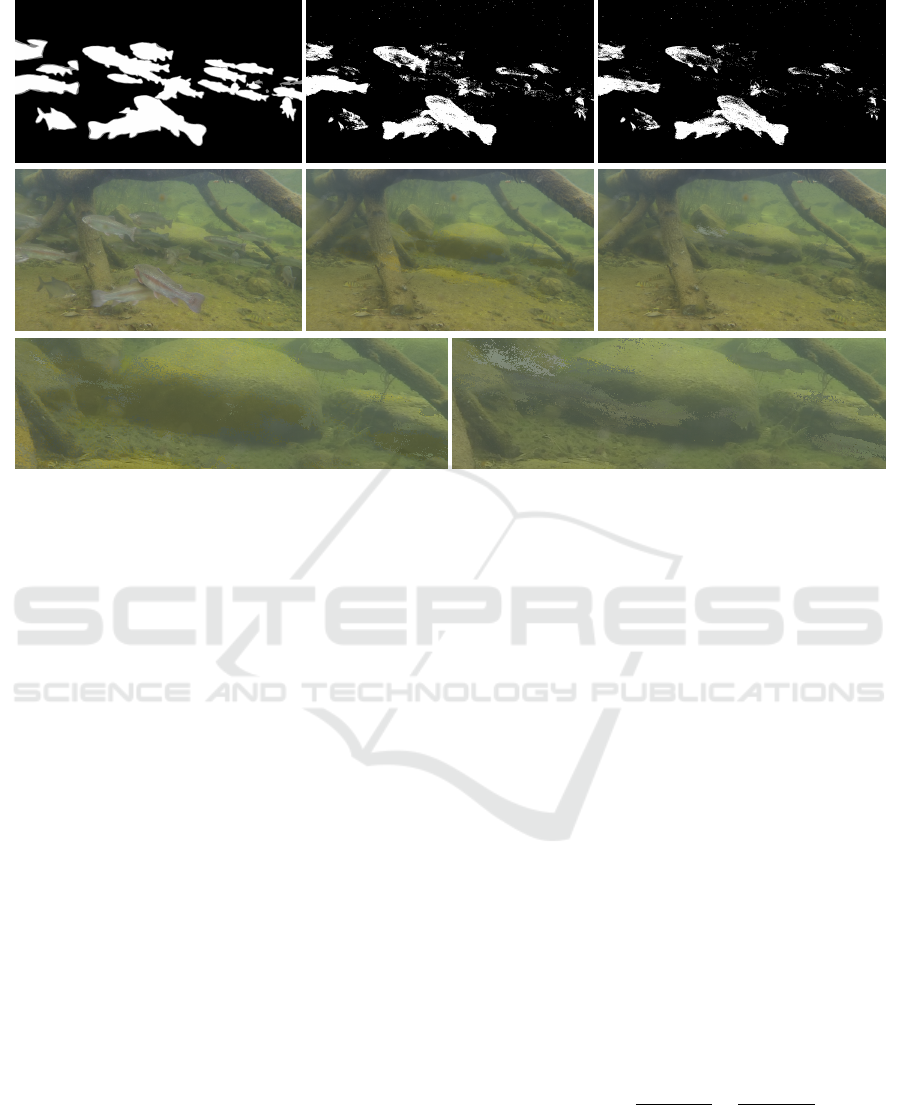
Figure 4: Effect of the Flux Tensor pre-segmentations on the background modeling. In the top row are from left to right the
ground truth image, the segmentation of the extended GSM method with pre-segmentation and without pre-segmentation.
Below that are the orignal frame and the corresponding visualizations of the two background models. The last row shows a
close up of the background models in an area where many fishes were passing by. The model created with pre-segmentations
(left) has less artefacts of fishes and is also not as blurry.
algorithm but there are still problems in very crowded
scenes. This is caused by an inherent problem in the
modeling of the background: it assumes that the back-
ground objects are visible the majority of the time
and will therefore adapt to the objects that appear the
most.
This is true in almost all of the background sub-
traction scenarios and works very well. However,
in some of the underwater scenes that we address
here, there is a fish swarm in a certain area and most
of the time fishes are visible there and not the real
background. Therefore, the background model would
adopt to the color of the fishes and not to that of
the background. To solve this problem we use the
Flux Tensor segmentations as a mask for the updating
of the background model. Thereby, areas with high
movement are not updated since it would only train
the model with information about foreground objects.
The principle is similar to that of the conservative
updating scheme which excluded pixels that are clas-
sified as foreground from the updating. However, this
does only work if the background model is already ac-
curate and a good segmentation can be provided. In a
scene that is constantly crowded no good background
model can be created and therefore the conservative
updating scheme fails. Here the pre-segmentations
can help since they do not need any model and help
creating a proper background model in the first place.
An example of this effect can be seen in Figure 4.
The visualization of the background model is created
by taking the gaussian with the highest weight of the
conservatively updated MoG and displaying the mean
of it.
3.4 N
2
Cut
Until now, the whole approach is completely pixel-
wise and only uses the temporal changes to detect
foreground objects. However, natural images have
spatial properties that can be used to further improve
the derived segmentations, e.g. a certain degree of
smoothness is always present and edges in the seg-
mentation should be aligned to edges of the frame
since they often represent borders of objects.
To this end, we use the N
2
Cut from (Radolko
et al., 2015) here. It is a GraphCut based approach
with a special energy function derived from NCut.
The NCut is defined as
NCut(A, B) =
Cut(A,B)
Assoc(A)
+
Cut(A,B)
Assoc(B)
,
Assoc(A) =
∑
i∈A, j∈A∪B
w
i j
,
Cut(A,B) =
∑
i∈A, j∈B
w
i j
,
(11)
Change Detection in Crowded Underwater Scenes - Via an Extended Gaussian Switch Model Combined with a Flux Tensor
Pre-segmentation
411
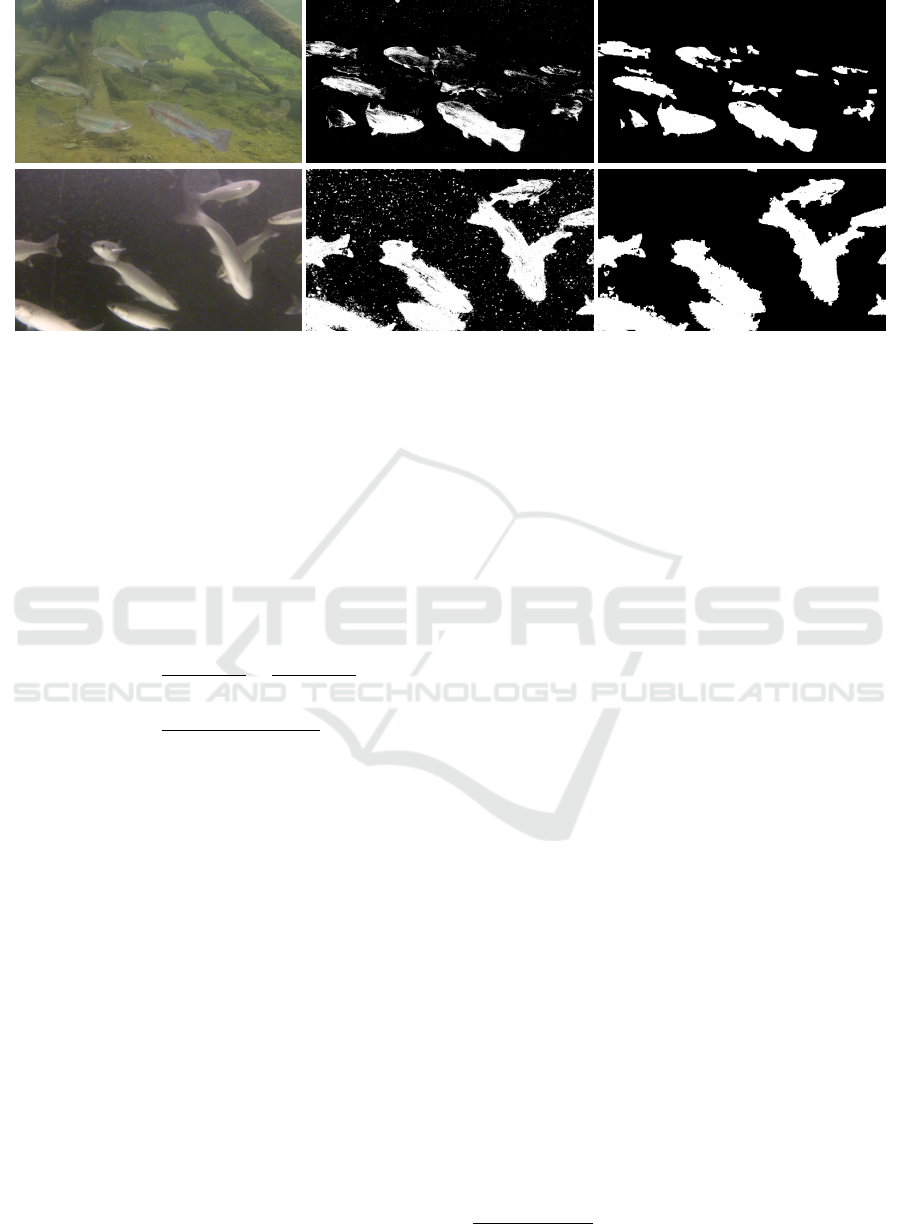
Figure 5: Example of the effect of the N
2
Cut method. On the left are the original images, in the middle the segmentations
after background subtraction and on the right is the result after applying the N
2
Cut.
where A and B are the sets of foreground and back-
ground pixels and w
i j
is a weight function. It is de-
fined as a sum over the three channels of the pixels i
and j by
w
i j
= |r
i
− r
j
| + |g
i
− g
j
| + |b
i
− b
j
|, (12)
if the pixels are neighbors and is 0 otherwise. Based
on this, the N
2
Cut is defined as
N
2
Cut(A,B) =
Cut(A,B)
nAssoc(A)
+
Cut(A,B)
nAssoc(B)
,
nAssoc(A) =
Assoc(A) + 1
∑
i∈A, j∈A∪B,∃e
i j
1 + 1
.
(13)
In this new energy function the Cut and Assoc val-
ues are normalized by number of elements that con-
tribute to them. Thereby, it still favors segmentations
that are aligned with edges in the image, similar to
the NCut, but also is free of any bias for a certain
amount of background or foreground in the segmen-
tation whereas the NCut tends to segmentations with
an equal amount of fore- and background. This is
an important feature for video segmentation as there
are often times when no foreground objects at all are
present in the scene.
This energy function will now be minimized over
the already existing segmentation derived from the
background subtraction. To this end a local optimiza-
tion is applied by changing the classification of single
pixels which are located at the border between fore-
ground and background areas. The new N
2
cut value,
after changing only pixel d from set A (foreground)
to B (background), can be computed very efficiently
with just a few additions and subtractions by using the
following formulas
Cut(A \ {d},B ∪ {d}) =
Cut(A,B) +
∑
i∈A ∧ i∈N(d)
w
id
−
∑
j∈B ∧ j∈N(d)
w
jd
,
(14)
Assoc(A \ {d}) =
Assoc(A) −
∑
i∈B ∧ i∈N(d)
w
id
,
(15)
Assoc(B ∪ {d}) =
Assoc(B) +
∑
i∈A ∧ i∈N(d)
w
id
.
(16)
Here N(d) is the four connected neighborhood region
of d. Thereby, the N
2
cut value and the segmentation
can be gradually improved without the high compu-
tational cost of the global optimization of a cut value
over a whole image. To increase the range/effect of
the minimization we apply it over several scales of
the image, starting with the smallest size and using
the result from there as a starting segmentation for the
next scale. Overall, this proved to be an efficient way
to smooth the segmentation derived from the back-
ground subtraction and align it to the edges of objects
in the frame. An example is depicted in Figure 5.
4 RESULTS
For the evaluation we took the dataset and numbers
presented in (Radolko et al., 2016)
2
. It is the only un-
derwater change detection dataset so far and includes
five videos of different scenes with fishes as mov-
ing foreground objects. For each video the first 1000
2
dataset available at: underwaterchangedetection.eu
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
412

Table 1: The results of our and four different background subtraction methods on the underwater change detection dataset.
The first one is the original GSM algorithm, the next two are MoG approaches and the last one is a background modeling
method based on K-nearest neighbours. The amount of foreground ( TP+FN) is not constant because of the small uncertainty
area in the dataset, for details see (Radolko et al., 2016).
Algorithm True Negative True Positive False Negative False Positive F1-Score
(Radolko and Gutzeit, 2015) 892,599,998 84,349,046 44,709,358 17,215,198 0.7314
(Zivkovic, 2004) 897,659,412 76,555,440 52,934,753 11,723,995 0.7030
(Kaewtrakulpong and Bowden, 2002) 912,653,089 36,184,999 86,673,758 1,288,154 0.4513
(Zivkovic and Heijden, 2006) 887,967,097 93,919,051 36,656,258 20,331,194 0.7672
proposed 872,360,637 116,926,034 30,167,642 17,345,687 0.8781
Table 2: The F1-Scores of the algorithms from Table 1 for each video of the dataset separately.
Algorithm
Video
Fish Swarm Marine Snow small Aquaculture Caustics two Fishes
(Radolko and Gutzeit, 2015) 0.5691 0.8361 0.7734 0.5499 0.7898
(Zivkovic, 2004) 0.3033 0.8182 0.7383 0.7383 0.7938
(Kaewtrakulpong and Bowden, 2002)
0.0569 0.6480 0.4315 0.6743 0.7579
(Zivkovic and Heijden, 2006) 0.5904 0.8244 0.8828 0.7533 0.7068
proposed 0.8459 0.9100 0.9332 0.6719 0.8245
frames are used as a learning phase and are followed
by 100 frames to which hand segmented groundtruth
images are available for the evaluation. The dataset
features typical underwater challenges like blur, haze,
color attenuation, caustics and marine snow which all
complicate the background modeling process.
A comparison between the proposed algorithm,
the original GSM and other background subtraction
algorithms is given in Table 1 and 2. It shows that
the extended GSM is a substantial improvement to the
original GSM on each of the five videos and also out-
performs the other methods on the whole dataset. In
Figure 6 some results of our algorithm for each of the
five videos are depicted.
In the Fish Swarm video we could achieve the
largest improvement, mainly because of the pre-
segmentations which enabled us to build a far better
background model of that scene. The main problem
in this video is that there are always fishes in the mid-
dle of the scene which are also all quite similar to each
other as well as the background. Therefore, a normal
background modeling algorithm would take the fishes
as part of the background and only the exclusion of
moving objects from the updating process with the
pre-segmentations could rectify that (see Figure 4).
Nonetheless, not all fishes in the Fish Swarm
video could be detected since some of them barely
move or are almost indistinguishable from the back-
ground. In the other four videos of the dataset the
fishes can be detected very reliable by the proposed
approach and the problems there mostly consist of
false detections of shadows caused by the fishes or
caustics on the water surface. It is a complicated task
to avoid these errors since the algorithm needs to be
very sensitive to detect fishes even when they are sim-
ilar to the background which then causes these false
detections.
5 CONCLUSION
In this paper we have enhanced the GSM background
modeling by combining it with the Mixture of Gaus-
sian idea and adding a foreground model. The fore-
ground model is especially useful in scenes with
swarms of fishes since the foreground objects in these
scenes are all similar and can therefore be modeled
accurate without a long adaption phase. Furthermore,
we have used a coarse segmentation derived by the
Flux Tensor to mark areas with possible foreground
objects so that they can be excluded from the updating
process of the background model. With this method
we have generated more accurate background models
without artefacts from foreground objects and hence
could create better segmentations.
To include a spatial component we used the N
2
Cut
to adapt the segmentation to the smoothness of natu-
ral images and also corrected single false detection
due to noise. We evaluated the proposed method on
the Underwater Change Detection dataset to test it in
these difficult situations and in scenarios with many
foreground objects that are permanently visible. Es-
pecially on the crowded scenes the algorithm showed
great improvements compared to other methods be-
Change Detection in Crowded Underwater Scenes - Via an Extended Gaussian Switch Model Combined with a Flux Tensor
Pre-segmentation
413
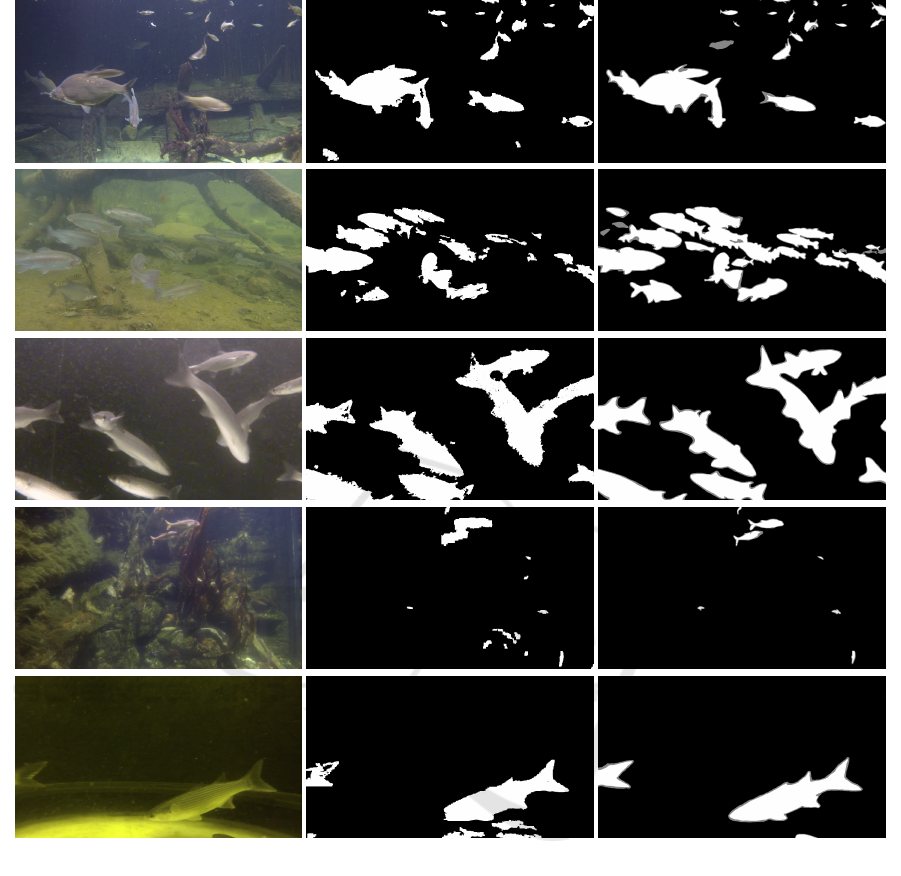
Figure 6: One frame of each of the five videos of the Underwater Change Detection dataset. From top to bottom are shown
the videos: Marine Snow, Fish Swarm, small Aquaculture, Caustics and two Fishes. In the middle column is the segmentation
of the proposed approach and in the right the ground truth data.
cause of the pre-segmentations but also on the other
videos a continuous improvement to the normal GSM
could be achieved.
REFERENCES
Barnich, O. and Droogenbroeck, M. V. (2011). Vibe: A
universal background subtraction algorithm for video
sequences. IEEE Transactions on Image Processing,
20(6):1709–1724.
Benfold, B. and Reid, I. (2011). Stable multi-target tracking
in real-time surveillance video. In CVPR, pages 3457–
3464.
Bianco, S., Ciocca, G., and Schettini, R. (2015). How
far can you get by combining change detection algo-
rithms? CoRR, abs/1505.02921.
Bucak, S., Gunsel, B., and Guersoy, O. (2007). Incremental
nonnegative matrix factorization for background mod-
eling in surveillance video. In Signal Processing and
Communications Applications, 2007. SIU 2007. IEEE
15th, pages 1–4.
Bunyak, F., Palaniappan, K., Nath, S. K., and Seetharaman,
G. (2007). Flux tensor constrained geodesic active
contours with sensor fusion for persistent object track-
ing. J. Multimedia, 2(4):20–33.
Gardos, T. and Monaco, J. (1999). Encoding video im-
ages using foreground/background segmentation. US
Patent 5,915,044.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
414

Hu, Z., Wang, Y., Tian, Y., and Huang, T. (2011). Selective
eigenbackgrounds method for background subtraction
in crowed scenes. In Image Processing (ICIP), 2011
18th IEEE International Conference on, pages 3277–
3280.
Kaewtrakulpong, P. and Bowden, R. (2002). An im-
proved adaptive background mixture model for real-
time tracking with shadow detection. In Video-based
surveillance systems, pages 135–144. Springer.
Marghes, C., Bouwmans, T., and Vasiu, R. (2012). Back-
ground modeling and foreground detection via a re-
constructive and discriminative subspace learning ap-
proach. In Image Processing, Computer Vision, and
Pattern Recognition (IPCV’12), The 2012 Interna-
tional Conference on, volume 02, pages 106–112.
Mignotte, M. (2010). A label field fusion bayesian model
and its penalized maximum rand estimator for image
segmentation. IEEE Transactions on Image Process-
ing, 19(6):1610–1624.
Nath, S. and Palaniappan, K. (2005). Adaptive robust
structure tensors for orientation estimation and im-
age segmentation. Lecture Notes in Computer Science
(ISVC), 3804:445–453.
Radolko, M., Farhadifard, F., Gutzeit, E., and von Lukas,
U. F. (2015). Real time video segmentation optimiza-
tion with a modified normalized cut. In Image and
Signal Processing and Analysis (ISPA), 2015 9th In-
ternational Symposium on, pages 31–36.
Radolko, M., Farhadifard, F., Gutzeit, E., and von Lukas,
U. F. (2016). Dataset on underwater change detection.
In OCEANS 2016 - MONTEREY, pages 1–8.
Radolko, M. and Gutzeit, E. (2015). Video segmentation via
a gaussian switch background-model and higher or-
der markov random fields. In Proceedings of the 10th
International Conference on Computer Vision Theory
and Applications Volume 1, pages 537–544.
Ridder, C., Munkelt, O., and Kirchner, H. (1995). Adap-
tive background estimation and foreground detection
using kalman-filtering. In Proceedings of Interna-
tional Conference on recent Advances in Mechatron-
ics, pages 193–199.
Schindler, K. and Wang, H. (2006). Smooth foreground-
background segmentation for video processing. In
Proceedings of the 7th Asian Conference on Computer
Vision - Volume Part II, ACCV’06, pages 581–590,
Berlin, Heidelberg. Springer-Verlag.
Shelley, A. J. and Seed, N. L. (1993). Approaches to static
background identification and removal. In Image Pro-
cessing for Transport Applications, IEE Colloquium
on, pages 6/1–6/4.
St-Charles, P. L., Bilodeau, G. A., and Bergevin, R. (2015).
Subsense: A universal change detection method with
local adaptive sensitivity. IEEE Transactions on Im-
age Processing, 24(1):359–373.
Stauffer, C. and Grimson, W. (1999). Adaptive background
mixture models for real-time tracking. In Proceedings
1999 IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition Vol. Two, pages
246–252. IEEE Computer Society Press.
Toyama, K., Krumm, J., Brumitt, B., and Meyers, B.
(1999). Wallflower: Principles and practice of back-
ground maintenance. In Seventh International Confer-
ence on Computer Vision, pages 255–261. IEEE Com-
puter Society Press.
Wang, R., Bunyak, F., Seetharaman, G., and Palaniappan,
K. (2014). Static and moving object detection using
flux tensor with split gaussian models. In 2014 IEEE
Conference on Computer Vision and Pattern Recogni-
tion Workshops, pages 420–424.
Warfield, S. K., Zou, K. H., and Wells, W. M. (2004).
Simultaneous truth and performance level estimation
(staple): An algorithm for the validation of image seg-
mentation. Ieee Transactions on Medical Imaging,
23:903–921.
Wren, C., Azarbayejani, A., Darrell, T., and Pentland, A.
(1997). Pfinder: Real-time tracking of the human
body. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 19:780–785.
Zivkovic, Z. (2004). Improved adaptive gaussian mixture
model for background subtraction. In Proceedings
of the Pattern Recognition, 17th International Confer-
ence on (ICPR’04) Volume 2 - Volume 02, ICPR ’04,
pages 28–31, Washington, DC, USA. IEEE Computer
Society.
Zivkovic, Z. and Heijden, F. (2006). Efficient adaptive den-
sity estimation per image pixel for the task of back-
ground subtraction. Pattern Recogn. Lett., 27(7):773–
780.
Change Detection in Crowded Underwater Scenes - Via an Extended Gaussian Switch Model Combined with a Flux Tensor
Pre-segmentation
415
