
Single Image Marine Snow Removal based on a Supervised Median
Filtering Scheme
Fahimeh Farhadifard
1
, Martin Radolko
1
and Uwe Freiherr von Lukas
1,2
1
Department of Computer Science, University of Rostock, Rostock, Germany
2
Fraunhofer IGD Institute, Rostock, Germany
{fahimeh.farhadifard, martin.radolko}@uni-rostock.de, uwe.freiherr.von.lukas@igd-r.fraunhofer.de
Keywords:
Digital Image Processing, Underwater Imaging, Marine Snow Removal, Image Enhancement.
Abstract:
Underwater image processing has attracted a lot of attention due to the special difficulties at capturing clean
and high quality images in this medium. Blur, haze, low contrast and color cast are the main degradations.
In an underwater image noise is mostly considered as an additive noise (e.g. sensor noise), although the
visibility of underwater scenes is distorted by another source, termed marine snow. This signal disturbs image
processing methods such as enhancement and segmentation. Therefore removing marine snow can improve
image visibility while helping advanced image processing approaches such as background subtraction to yield
better results. In this article, we propose a simple but effective filter to eliminate these particles from single
underwater images. It consists of different steps which adapt the filter to fit the characteristics of marine snow
the best. Our experimental results show the success of our algorithm at outperforming the existing approaches
by effectively removing this phenomenon and preserving the edges as much as possible.
1 INTRODUCTION
Underwater (UW) images are mainly characterized
by poor visibility due to light interaction with water
and its inherent particles. Light interacts with water
via attenuation which increases by travelling deeper
in water or by expansion of the object-camera dis-
tance. It is caused by two factors: light absorption
and scattering. As a result, visibility UW is limited
at a distance of about twenty meters in clear water
and five meters or less in turbid water (Bazeille et al.,
2006). This is due to color cast, haze, blur and low
contrast.
Naming distortions for UW imaging, one of the
degradation sources which is not well-researched and
mostly neglected from image processing algorithms,
is the presence of floating particles. Floating parti-
cles are composed of dead material and dissolved or-
ganic matter slowly drifting downward. These par-
ticles, so-called marine snow, are highly variable in
shape, size and concentration. In some cases such as
biology, marine snow can be an important subject to
be researched. In contrary, for image processing algo-
rithms, marine snow is mostly considered as a source
of noise and should be removed. Light reflection on
marine snow creates white bright spots that lead to
an inhomogeneous medium. Not only scattering and
absorption are increased due to this phenomenon, but
also as their luminance is high, they may appear dom-
inant enough to reduce the scene perception.
There are many approaches towards UW image
enhancement and restoration which address blur, haze
and color cast such as (Trucco and Olmos-Antillon,
2006)(Chiang and Chen, 2012)(Ancuti et al., 2012).
Fewer approaches tackle denoising UW images e.g.
(Arnold-Bos et al., 2005)(Shanmugasundaram et al.,
2013). These methods consider that every kind of
present noises can be defined as one of the additive
noises. Thus Gaussian, speckle and salt and pepper
noises are considered as UW noise and with this as-
sumption authors provide a solution. However, none
of these approaches are directly designed to eliminate
marine snow and their main assumptions do not ac-
complish its characteristics. Removing marine snow
is not a trivial task since an actual object in the image
is introduced as noise and should be discarded.
Based on our knowledge only one paper has di-
rectly addressed the elimination of this phenomenon
(Banerjee et al., 2014) which is based on a probabilis-
tic approach and median filtering. It is a patch-based
approach which checks the probability of existence of
marine snow. This is done by looking for high lumi-
nance pixels in a patch using a predefined threshold
280
Farhadifard F., Radolko M. and Freiherr von Lukas U.
Single Image Marine Snow Removal based on a Supervised Median Filtering Scheme.
DOI: 10.5220/0006261802800287
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 280-287
ISBN: 978-989-758-225-7
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

and calculating the probability as follows:
P(MS) = 1 −
N
HL
N
(1)
where N
HL
and N stand for number of high lumi-
nance pixels and total number of pixels in the cur-
rent patch respectively. A double checking is done to
avoid misclassification of true objects as marine snow.
To this end, keeping the same center pixel, they in-
creased the window size by 2 and calculate the prob-
ability one more time. If the probability of having
marine snow in the patch is still high (low number
of high luminance pixels) then the center pixel is re-
placed by the median value of the local patch. How-
ever, cross checking in this approach may fail in the
case that marine snow is at a corner of window and
has a structure big enough to fit partially in the win-
dow. Thus number of high luminance pixels increases
at the cross checking and results in misclassification.
This is not considered in this approach since they as-
sumed that marine snow has a structure of two or three
pixels. Although depending on the image resolution,
marine snow can sometimes reach size of 50×50 pix-
els. Moreover, the approach is only applied on lumi-
nance channel which could result in false detection of
similar structures with different colors.
To address above mentioned shortcomings, first
we investigate the real characteristics of marine snow
and provide our solution accordingly. The aim is to
clean an UW image from the presence of this phe-
nomenon and preserve the edges of the desired objects
as much as possible. For this, we design a filter which
examines each pixel in all possible extracted patches
to detect marine snow. Once defected pixels are de-
fined, their intensity is replaced by a new value which
is calculated and set according to a voting algorithm.
We build our algorithm based on a supervised noise
detection and concept of median filtering. Our ap-
proach is a patch-based method in a multiscale man-
ner. It is a simple but effective method which show
promising results where marine snow is almost com-
pletely removed and even small details are preserved.
1.1 Proposed Approach
One of the most common used filters in cases sim-
ilar to marine snow such as impulse noise and
dust and scratches is median filtering (Wang and
Zhang, 1999)(Hwang and Haddad, 1995)(Abreu
et al., 1996)(Bergman et al., 2007). The simplicity
and efficiency of these filters besides successful re-
sults motivate us to address our source of noise with
a similar filter. To this end, we first investigate the
characteristic of marine snow and propose an adap-
tive filter accordingly.
(a) (b)
(c) (d)
Figure 1: Illustration of marine snow characteristics.
1.2 Characteristics of Marine Snow as a
Noise
As plants and animals near the surface of the ocean
die and decay, they fall toward the sea floor, just like
leaves and decaying material fall onto a forest floor.
The decaying material is referred to as marine snow,
because it looks like snowflakes. These particles grow
as they fall, some reaching several centimetres in di-
ameter. In addition to dead animals and plants, marine
snow also includes faecal matter, and other inorganic
dust.
In an image, this phenomenon appears as white
bright spots randomly distributed in the image. These
bright spots have specific properties as follows:
1. Size: They appear in different sizes depends on
the image resolution and the camera scene dis-
tance. Usually between 3 by 3 pixels to 50 by
50 pixels (Figure 1(a)). It is not necessarily sym-
metric so can have different hight and width.
2. Intensity: Since this is an object and not additive
noise due to the sensor or so, they have both high
and low frequencies. It consists of a high peak
somewhere in the middle and intensity the sur-
rounding area decreases proportional to the dis-
tance to the peak location. In most cases, a dark
area around the marine snow highlights its inten-
sity (Figure 1(b)).
3. Shape: Its shape can be roughly estimated as a
Gaussian distribution in all directions although
the high intensity peak is not always in the middle
so its not symmetric. (Figure 1(b)).
4. Distribution: In contrary to additive noise, marine
Single Image Marine Snow Removal based on a Supervised Median Filtering Scheme
281

snow is present in all layers of an image and there-
fore, it can have a highly overlapped and non-
uniform distribution over the image (Figure 1(c)).
5. Reflection: The most challenging fact about this
phenomenon is that in case of an artificial light,
they scatter the light to the camera and appear as
circle shaped reflections. This leads to further dis-
tortion since they superimpose themselves in front
of the scene (Figure 1(d)).
1.3 Marine Snow Removal - Supervised
Median Filtering
Taking into consideration most of aforementioned
characteristics, we propose an algorithm based on me-
dian filtering to remove marine snow effect from sin-
gle UW images. Our algorithm is a supervised ap-
proach. First it detects the potential corrupted pixels.
The candidate pixels are those that are highly dissim-
ilar than their neighbors and are therefore suspected
to be part of defect. Dissimilarity is defined as an
unusual higher intensity area in a patch. The Dissim-
ilar Pixel Values (DPV) are replaced by the mid value
of the rank-ordered remaining values in the current
patch. This process is repeated for the whole image.
We extract the patches highly overlapped; this
means each pixel can be in n × n possible patches
(where n is the patch size) except for the pixels at the
border of the image with less possibilities. Therefore
for each pixel marked as DPV several filtered can-
didates could be obtained. Next a voting algorithm
based on a predefined threshold is used to make the
final decision. This is when edges of objects are pre-
served and noise is eliminated. The threshold is de-
fined according to the size of window and naturally
number of candidates for the processing pixel. At
last, to robust our algorithm to different size of ma-
rine snow, the algorithm is repeated for different patch
sizes.
To be more precise, consider the corrupted image
X of size N × M where X(i, j)
c
for c ∈ (R, G, B) de-
notes the intensity value at pixel location (i, j) and
channel c. Let Ω be the extracted patch of size n × n
centered at X(i, j)
c
. The detection, and filtering of
the proposed algorithm is explained in two following
subsections.
1.4 Coarse Filtering
At this step, we extract all possible patches of the im-
age and for each and every patch the following condi-
tions are checked to detect all dissimilar pixel values.
Firstly, we mark the pixels with a very high intensity
values compared to the neighbours in a local patch. A
R
G
B
Figure 2: The pixels of current patch are visualized as points
in RGB color space. The purple sphere demonstrates the
search environment for the density calculation.
pixel candidate p has to satisfy the following inequal-
ity:
kp − µ(Ω)k
2
2
> W
1
· σ(Ω) p ∈ Ω, (2)
here W
1
is an empirical weight, σ(Ω) is the standard
deviation and µ(Ω) denotes the mean value of the lo-
cal patch Ω. Secondly, to find the general outliers
we apply the idea of (Gutzeit et al., 2010). By con-
sidering the RGB color space as an Euclidean space,
we calculate the density of pixels in a specific area
to identify the outliers. For each suspected pixel, a
sphere covering an area surrounding it is explored
(see Figure (2)). The number of pixels within this
sphere is defined as follows:
#{v ∈ Ω | ∃p ∈ Ω : kp − vk
2
2
< W
2
· σ(Ω)}, (3)
which together with the volume of sphere and num-
ber of pixels in the patch gives us the density. The
radius of the sphere is defined dynamically based on
the weighted standard deviation of Ω to make the ap-
proach adaptive. We consider marine snow in an im-
age to have colors with low saturation and high value
which is mostly the case. Therefore, to avoid taking
into account the objects with the same properties as
marine snow but different colors, we discard the pix-
els with high saturation by applying the following in-
equalities
|p
c
− p
l
| < T ∀c, l ∈ {R, G, B} ∧ c 6= l. (4)
Thereby, we limit dissimilar pixel values to have col-
ors close to white using a predefined threshold T .
Once all pixels which satisfy three aforemen-
tioned equations are detected, we discard them from
the patch Ω, and sort the remaining pixel values
(RPV), the mid value of this list is derived as the ini-
tial filter value:
Ω
f
(i, j) =
(
med(RPV ), if Ω(i, j) ∈ DPV
Ω(i, j), otherwise
(5)
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
282

where Ω
f
indicates the corresponding filtered patch.
Before initial filtering, the pixels surrounding the one
in DPV list are examined if there is a sudden low in-
tensity, these pixel values are discarded from the me-
dian calculation. The reason for such a selection is to
discard the halo-like shadows around the high inten-
sity of marine snow (see property 2 in section 1.2).
Therefore, not only a very high bright spots but also
a very dark surrounding defines this phenomenon and
should be filtered out.
1.5 Fine Filtering
We use fine filtering to avoid removing objects’ edges
since in coarse filtering step all pixels clustered as
DPV are filtered, this is regardless of noise or objects.
This may happen when the patch is placed on the
edges of an object which can satisfies all conditions
in the last step. To prevent such a false detection, we
employ a voting algorithm to make the final decision.
For this, we extract the patches in highly overlapped
fashion, accordingly, each pixel is checked in n × n
patches. This means if a pixel is defined as DPV in
several patches, then we have several filtered values
for it. Here is where our voting algorithm decides
about that pixel. If it is marked as DPV in more than
80% out of n × n possible patches (highly voted to be
noisy), then it is replaced with the median value of all
initial filtered values correspond to that pixel. On the
other hand, if the pixel is not marked as DPV in such
a big majority then it will keep its original value in
the final result. To clear the idea behind such a strat-
egy, consider a patch which is placed at the edge of
an object, therefore the pixels correspond to that part
of object are marked as DPV. Now moving the patch
fully overlapped surrounding those pixels, there will
be the situation that the object is not only in the corner
of the patch but covering a big part of the patch and
finally the whole patch. In this situation those pix-
els which were clustered as DPV at first, won’t sat-
isfy the conditions mentioned in the last section and
won’t be clustered as DPV anymore. Figure (3) illus-
trates the ambiguity. Thus, the voting algorithm can
avoid destroying the objects’ edges which are marked
as DPV in minor number of patches out of n × n pos-
sible patches.
To take care of different sizes of noise, we have
used different patch sizes. Based on our experiments
the maximum patch size in an HD image should be
19 × 19. For that reason, our method is applied in
several iterations until all pixels have been tested and
the noise in different layers is filtered out.
Figure 3: Marine snow detection, shows overlapping
patches for marine snow (left) versus a true edge (right).
2 SIMULATION RESULTS AND
DISCUSSIONS
Our proposed method is applied on several UW im-
ages taken in both sea and pool in presence of marine
snow. In some images such as the one which is taken
at Ozeaneum Stralsund (Figure (4)), we did not use
any artificial light UW, but the ones which are taken
in see or river (Figure (5) and (7)) due to depth, an
artificial light is used. Artificial illumination causes
more degradation where the marine snow is dominant,
since the reflection of strong light on these particles
introduces bright transparent circles which superim-
pose themselves in front of the scene as a small veil-
ing area (Figure 1(d)). This introduces a new and very
complicated issue which needs to be tackled in a dif-
ferent perspective since it has different characteristics
than marine snow itself. In these cases we ignore the
reflections and only focus on removing marine snow
itself.
Figure (4(a)) illustrates a relative simple example
of an UW scene with marine snow and the result af-
ter applying the proposed algorithm (4(f)). The main
focus in our algorithm is to remove noise while pre-
serving the objects’ edges as much as possible. As
it can be seen, marine snow is removed effectively
while even the small details of the background struc-
ture are preserved. Furthermore, we have compared
our method to the similar existing ones based on me-
dian filtering. Our method outperforms the three dif-
ferent versions of median filters. This is when basic
median filter with window size 5 smoothed the im-
age too much which destroyed all the details (Fig-
ure 4(b)), the progressive median filtering (Wang and
Zhang, 1999) cleaned the marine snow but obviously
destroyed the edges of the objects (fishes) (Figure
4(c)). Decision based median filtering (Srinivasan
and Ebenezer, 2007) failed at removing marine snow
which is explainable due to different criteria at de-
tecting noise (Figure 4(d)). The only competitive one
is (Radolko et al., ) which is an improved version of
Single Image Marine Snow Removal based on a Supervised Median Filtering Scheme
283
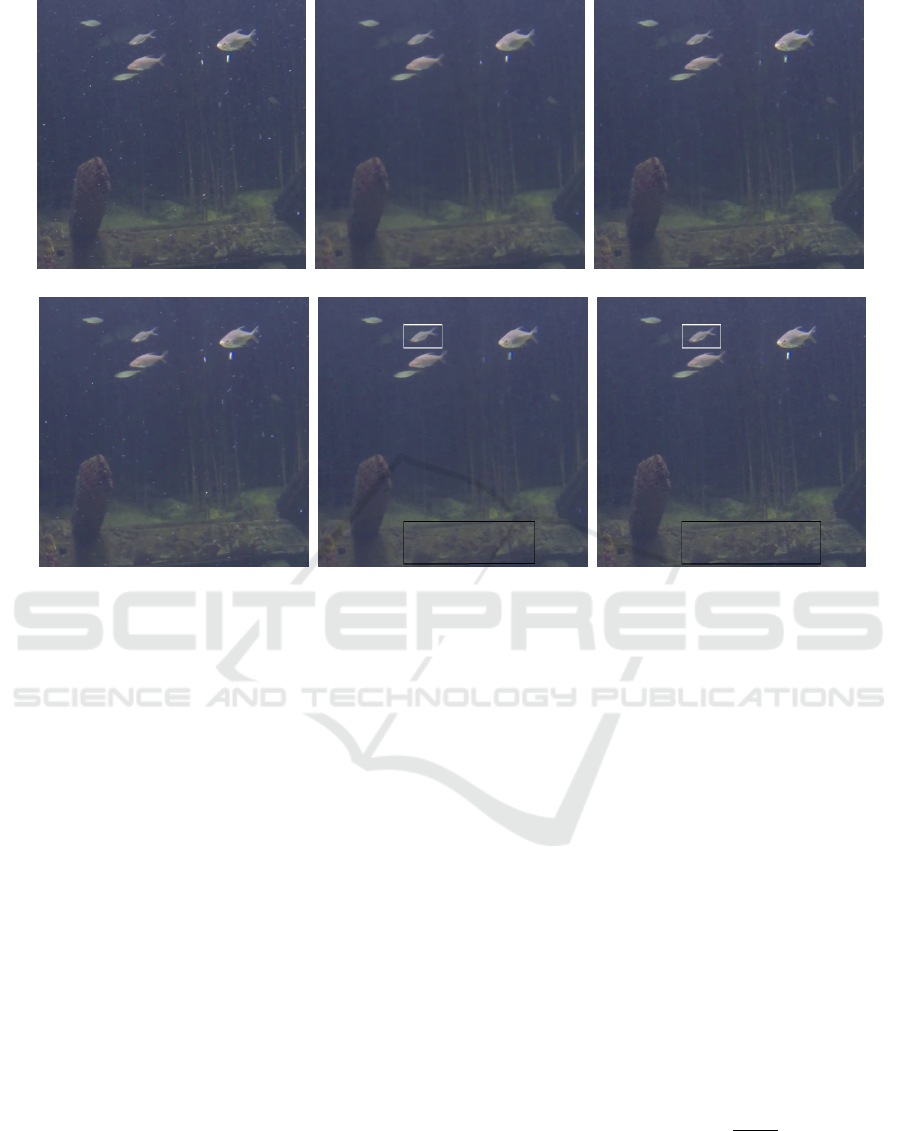
(a) Original (b) Basic median filter (c) (Wang and Zhang, 1999)
(d) (Srinivasan and Ebenezer, 2007) (e) (Radolko et al., ) (f) Proposed method
Figure 4: The original image (a) and results after applying basic median filter (b), (Wang and Zhang, 1999) (c), (Srinivasan and
Ebenezer, 2007) (d), (Radolko et al., ) (e) and our proposed method (f). Areas assigned with rectangles shows how (Radolko
et al., ), (Banerjee et al., 2014) smoothed the true edges of the image details which are preserved in proposed method.
(Banerjee et al., 2014) with few changes which are ap-
plied to increase the accuracy of noise selection and
filtering steps in (Banerjee et al., 2014). For this, they
check if the center pixel has a high luminance value
compared to its neighbours, if yes then they double
check it with a bigger window. If in both cases center
pixel is defined as being noisy, then it is replaced by
the median value of the local window discarding the
center pixel itself. For further enhancement, instead
of only luminance channel, they applied it on each
color channel separately. At the first glance, (Radolko
et al., ) (Figure 4(e)) shows competitive results but as
we pay more attention to the detail, it can be seen that
a lot of details at the background (e.g. black rect-
angle) and also high frequencies at the foreground’s
objects are smoothed (e.g. white rectangle).
Figure (5) shows the results of our method and
(Radolko et al., ) for a more challenging case, where
marine snow is more dominant and contains some
reflections. This leads to more difficulty where re-
flections overlap with marine snow and prevent the
method from detecting and removing them com-
pletely. Despite big reflections which are still present,
our method could remove marine snow while very
small details of marine creature are retained. At
last we have tested our method on a very difficult
case (Figure 7) which is highly corrupted with marine
snow. The proposed approach could clean the marine
snow effectively, although, due to using artificial light
source, reflection of marine snow is dominant enough
to disturb the visibility of image further. This image
can illustrate how intensive marine snow is involved
in all layers of the scene.
Furthermore, we test the ability of proposed
method at removing marine snow quantitatively. For
this, two important parameters namely Mean Square
Error (MSE) and Peak Signal to Noise ratio (PSNR)
are employed. PSNR is mainly used to measure the
quality of noise free reconstructed image. Generally
it is shown in terms of logarithmic decibel scale due
to high dynamic range of images and is derived as fol-
lows:
PSNR = 20 × log[
Max
2
MSE
] (6)
here MAX denotes maximum pixel value of the
image. MSE represents the variance between image
after reconstruction
ˆ
X and the original image X and is
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
284
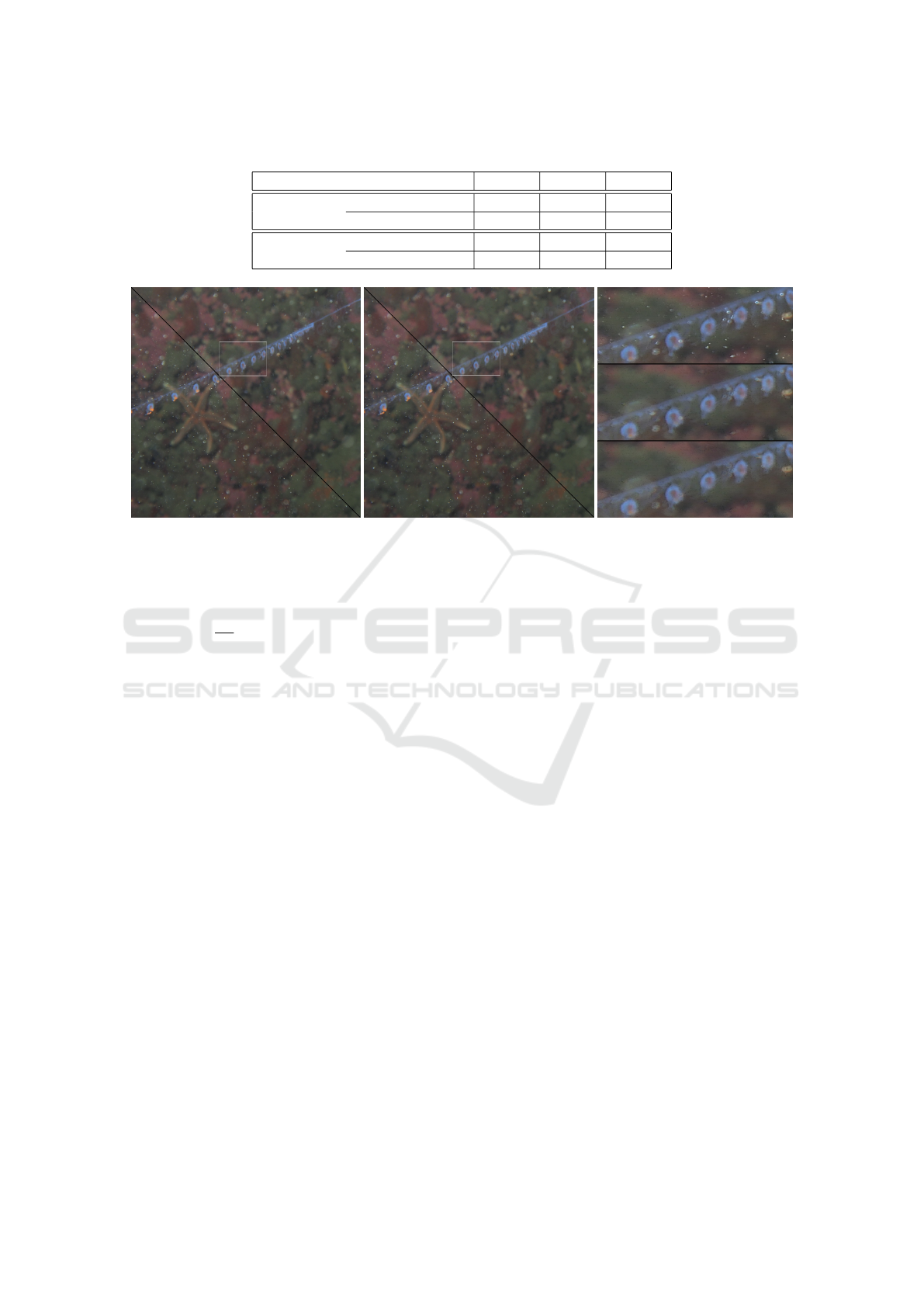
Table 1: Comparison of Marine Snow Removal Methods using PSNR and MSE Metrics.
Level 1 Level 2 Level 3
PSNR
(Radolko et al., ) 38.644 37.801 37.460
Proposed Method 43.595 41.538 41.150
MSE
(Radolko et al., ) 8.884 10.787 11.668
Proposed Method 2.841 4.563 4.989
Figure 5: From left to right: result after applying (Radolko et al., ), our approach (both in comparison to the original image).
The last image is a close-up of the original image, (Radolko et al., ) and proposed method from top to bottom respectively.
Underwater image is provided by Eik Deistung.
computed as:
MSE =
1
mn
m−1
∑
i=0
m−1
∑
j=0
|
ˆ
X(i, j) − X(i, j)|. (7)
For both aforementioned metrics, besides the re-
sult after denoising, the original noise free version
of the image is also needed. However, in UW case
mostly we do not have access to the original image
except when a target image is used. A common solu-
tion is to simulate the degradation model over a high
quality and clear image. However, simulation of ma-
rine snow is still a subject under investigation (Slade
et al., 0011). Nevertheless a simple way to model
marine snow would be to generate salt and pepper
noise on the original image such as (Shanmugasun-
daram et al., 2013). Although, earlier in this paper
we have discussed that marine snow is not an additive
noise and behaves differently, thus, it is not a valid as-
sumption and cannot be used to evaluate the proposed
method.
To this end, we have came up with a different strat-
egy. First we provide a realistic ground truth from a
scene containing marine snow. For this, we choose a
test image from the scene 4 and remove all the ma-
rine snow particles by a human expert. This gives
us a ground truth image that should be recovered by
the algorithm. Second, we extract the marine snow
from another frame of the same scene and place them
by hand in the ground truth image. Thereby, we can
freely decide on the amount of marine snow we want
to have in the image and at the same time we have the
exact ground truth data available. In addition, since
the extracted marine snow patches are real samples
from the very same scene, we obtain very realistic
simulated image which matches the size and the res-
olution of marine snow the best. We create three im-
ages of the same scene with different levels of cor-
ruptions, level 1 (low corruption), level 2 (medium
corruption) and level 3 (highly corrupted). Each level
differs from the other ones by the number of marine
snow placed in it.
Table 1 compares the value of PSNR and MSE of
the result after applying (Radolko et al., ) and pro-
posed method on three images. The results illustrate
that proposed method achieves higher PSNR (about 5
and 4 db at level 1 and levels 2 and 3 respectively) and
lower MSE in all three levels. This is where percep-
tually (Radolko et al., ) shows more convincing result
for level 1, although numbers indicates that it is only
due to smoothness which is a drawback of (Radolko
et al., ) and (Banerjee et al., 2014) algorithms. Figure
7 demonstrates the qualitative comparison of results
after applying (Radolko et al., ) and proposed method
on simulated data. To give a better insight, we have
provided a zoom in image of the results of image level
3. It can be observed that (Radolko et al., ) failed at
completely removing marine snow with a relative big-
ger size and falsely removed the high frequencies of
the true object (fish) by over smoothing it.
Single Image Marine Snow Removal based on a Supervised Median Filtering Scheme
285

(a) (Radolko et al., ) / Original (b) Proposed method / Original
Figure 6: Results after applying (Radolko et al., ) (a) and proposed method (b) on a highly corrupted image. The results are
shown compared to the original image which is the courtesy of Eik Deistung.
(a) Ground Truth (b) Input Image with Three Levels of Corruption
(c) Input Image (Level 3) / (Radolko et al., ) (d) Input Image (Level 3) / Proposed Method
Figure 7: Comparison between the simulated data (level 3) and the results of (Radolko et al., ) (first column) and proposed
method (second column). The close up shows the ability of proposed method at preserving the object’s detail while eliminating
marine snow compared to (Radolko et al., ).
3 CONCLUSIONS
UW images suffer from unique distortions due to
light absorption and scattering. Some of them can
be addressed via solutions for similar challenges for
in air images such as blur, haze, low contrast. Al-
though they have their own characteristics. However,
there are some imaging defects that are unique to this
medium and should be tackled specifically consider-
ing their properties such as color cast or marine snow.
In this report we have addressed removing marine
snow from UW images as a source of noise. This
phenomenon is defined as bright spots which are the
reflection of light on the surface of aggregate matters.
Not much literature has addressed this challenge due
to its complexity. Usually it is considered as salt and
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
286

pepper noise, due to the appearance similarity. Al-
though it is not a valid assumption since marine snow
is an object which disturbs the scene’s visibility and
is undesired in our case. In addition, it is not a sin-
gle pixel noise like salt and pepper, in contrary, it has
a structure of several pixels with both high and low
intensity pixel values.
In this paper, we have discarded the circle shaped
lower intensity reflections of marine snow which usu-
ally appear when an artificial light is used at the time
of photography. Despite that, we have considered
most of the characteristics of marine snow and pro-
posed a simple and effective method towards remov-
ing this phenomenon. Our method consists of a se-
lective noise detection process and a novel voting al-
gorithm which prevents misclassification of objects
as noise. Results have shown the superior of our
method compared to several median filters such as
(Wang and Zhang, 1999)(Srinivasan and Ebenezer,
2007) and (Radolko et al., ).
As our future work, we are concerned about tak-
ing into account the circle shaped light reflection of
marine snow caused by using an artificial light. These
reflections appear as small veiling areas and lower the
visibility by hiding the scene. This is more challeng-
ing to deal with since they have bigger structure than
marine snow itself and therefore bigger distortion.
ACKNOWLEDGEMENTS
This research has been supported by the German Fed-
eral State of Mecklenburg-Western Pomerania and the
European Social Fund under grant ESF/IV-BM-B35-
0006/12.
REFERENCES
Abreu, E., Lightstone, M., Mitra, S. K., and Arakawa, K.
(1996). A new efficient approach for the removal of
impulse noise from highly corrupted images. IEEE
Transactions on Image Processing, pages 1012–1025.
Ancuti, C., Ancuti, C., Haber, T., and Bekaert, P. (2012).
Enhancing underwater images and videos by fusion.
In Computer Vision and Pattern Recognition (CVPR),
2012 IEEE Conference on, pages 81–88.
Arnold-Bos, A., Malkasse, J.-P., and Kervern, G. (2005).
A preprocessing framework for automatic underwater
images denoising. In European Conference on Prop-
agation and Systems.
Banerjee, S., Sanyal, G., Ghosh, S., Ray, R., and Shome,
S. N. (2014). Elimination of marine snow effect
from underwater image - an adaptive probabilistic ap-
proach. In Electrical, Electronics and Computer Sci-
ence (SCEECS), 2014 IEEE Students’ Conference on,
pages 1–4.
Bazeille, S., Quidu, I., Jaulin, L., and Malkasse, J.-P.
(2006). Automatic underwater image pre-processing.
In CMM’06.
Bergman, R., Maurer, R., Nachlieli, H., Ruckenstein, G.,
Chase, P., and Greig, D. (2007). Comprehensive solu-
tions for removal of dust and scratches from images.
Chiang, J. and Chen, Y.-C. (2012). Underwater image en-
hancement by wavelength compensation and dehaz-
ing. Image Processing, IEEE Transactions on, pages
1756–1769.
Gutzeit, E., Ohl, S., Kuijper, A., Voskamp, J., and Urban,
B. (2010). Setting graph cut weights for automatic
foreground extraction in wood log images. In VISAPP
2010, pages 60–67.
Hwang, H. and Haddad, R. A. (1995). Adaptive median
filters: new algorithms and results. IEEE Transactions
on Image Processing, pages 499–502.
Radolko, M., Farhadifard, F., and von Lukas, U. F. Dataset
on underwater change detection. to appear in 2016
Oceans - Monterey.
Shanmugasundaram, M., Sukumaran, S., and Shanmu-
gavadivu, N. (2013). Fusion based denoise-engine
for underwater images using curvelet transform. In
Advances in Computing, Communications and Infor-
matics (ICACCI), 2013 International Conference on,
pages 941–946.
Slade, W. H., Boss, E., and Russo, C. (20011). Effects
of particle aggregation and disaggregation on their in-
herent optical properties. Optics express, 19(9):7945–
7959.
Srinivasan, K. and Ebenezer, D. (2007). A new fast and ef-
ficient decision-based algorithm for removal of high-
density impulse noises. IEEE signal processing let-
ters, pages 189–192.
Trucco, E. and Olmos-Antillon, A. T. (2006). Self-tuning
underwater image restoration. Oceanic Engineering,
IEEE Journal, pages 511–519.
Wang, Z. and Zhang, D. (1999). Progressive switching
median filter for the removal of impulse noise from
highly corrupted images. IEEE Transactions on Cir-
cuits and Systems II: Analog and Digital Signal Pro-
cessing, pages 78–80.
Single Image Marine Snow Removal based on a Supervised Median Filtering Scheme
287
