
Trained 3D Models for CNN based Object Recognition
Kripasindhu Sarkar
1,2
, Kiran Varanasi
1
and Didier Stricker
1,2
1
German Research Center for Artificial Intelligence (DFKI), Kaiserslautern, Germany
2
Technical University Kaiserslautern, Kaiserslautern, Germany
{kripasindhu.sarkar, kiran.varanasi, didier.stricker}@dfki.de
Keywords:
Object Recognition, Fine-tuning CNNs, Domain Fusion, Training on 3D Data, Graphics Assisted CNN.
Abstract:
We present a method for 3D object recognition in 2D images which uses 3D models as the only source of
the training data. Our method is particularly useful when a 3D CAD object or a scan needs to be identified
in a catalogue form a given query image; where we significantly cut down the overhead of manual labeling.
We take virtual snapshots of the available 3D models by a computer graphics pipeline and fine-tune existing
pretrained CNN models for our object categories. Experiments show that our method performs better than the
existing local-feature based recognition system in terms of recognition recall.
1 INTRODUCTION
In this paper, we describe a method for automatically
identifying a 3D object from a data base given an in-
put image taken from close range. We specifically ad-
dress the application scenario where a machine part or
a museum object needs to be precisely identified in a
catalogue. The traditional approach for solving such
a problem is to build a content-based image retrieval
(CBIR) system that automatically recognizes a given
object. However, the task is challenging due to ob-
ject similarity, variations in appearance and lighting,
as well as perspective. Typically, the catalogue con-
tains only a 3D CAD model or 3D scan of the object.
Creating an image database from actual photographs
of each object in the catalogue is a significant over-
head which may be impractical. In this paper, we
assume that only the 3D model is available and au-
tomatically render a set of images using a synthetic
computer graphics pipeline.
A related but different problem is automatic la-
belling of object categories in an image - such as the
ImageNet challenge (Russakovsky et al., 2015). In
this problem, a significantly large data set of images is
collected that encapsulates the variation in object cat-
egories and labels: 15 million labelled high resolution
images in over 22,000 categories in ImageNet. The
top-performing methods for this challenge use deep
convolutional neural network (CNN) that are trained
on this large labelled data set (Krizhevsky et al., 2012;
Girshick et al., 2014; Girshick, 2015; Ren et al.,
2015). It is very hard to extend these methods to
our application scenario, as the size of the training set
is much smaller. However, the earlier neural layers
of the CNN models that are pretrained on this larger
training set learn generic image features that encode
variability in perspective and lighting. In this paper,
we extend these pretrained networks with a new learn-
ing mechanism that uses the rendered synthetic im-
ages of the 3D models in our catalogue. We show
that our novel method of training achieves a large im-
provement in recognition accuracy when precise 3D
models are available.
Also through this work, we want to make a con-
scious effort to shift our recognition system follow
human behaviour. This is due to the fact that human
beings do not need a lot of data to learn object cate-
gories. In fact, we only need few examples per cate-
gory to learn and deduce about the category(Fei-Fei,
2006; Fei-Fei et al., 2006). It is estimated that a child
has learned almost all of the 10 - 30 thousand object
categories in the world by the age of six (Biederman,
1987). These facts tells us that it is possible to achieve
high detection accuracy without the need of such a
large number of training examples. Second, human
beings ‘see’ objects in 3D. We infer 3D properties of
an object looking at the 2D image.
In this work, we make use of the 3D models by
taking their virtual snapshots from several direction
with different types of background. We use these
generated images to fine-tune existing trained CNN
model for our instances/categories.
Model based recognition techniques existed in the
topic of local-feature based detection system for a
130
Sarkar K., Varanasi K. and Stricker D.
Trained 3D Models for CNN based Object Recognition.
DOI: 10.5220/0006272901300137
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 130-137
ISBN: 978-989-758-226-4
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved

long time - since the invention of SIFT (Lowe, 2004).
Here, 3D models were augmented with 2D local fea-
tures computed as the result of Structure From Motion
(SFM) (Snavely et al., 2006; Snavely et al., 2008) per-
formed on hundreds of images taken of a real object.
These feature-augmented 3D models were used for
object recognition in the test time (Collet Romea and
Srinivasa, 2010; Collet Romea et al., 2011). To avoid
manual work of taking images and with the avail-
ability of realistic 3D models, (Sarkar et al., 2016)
solved the same problem by using 3D model as the
only source of training data to create the feature-
augmented models. In this paper, we also consider
only 3D models as input. However in contrast to
(Sarkar et al., 2016), we train a CNN for the task of
object recognition.
Therefore, the main contributions of our paper are
as follows.
1. We create a training system for object recognition
in 2D images, which only uses 3D models as the
training data.
2. We show that in the presence of accurate 3D mod-
els, the recognition accuracy of our system is bet-
ter than the State-of-the-Art local-feature based
recognition system.
3. We perform a systematic evaluation with render-
ing parameters of our method and show that back-
ground, texture and number of training images
have significant role in the training process in
terms of recognition accuracy.
It is to be noted that our recognition system pre-
sented in this paper performs extremely well in the
presence of accurate 3D models to be detected in the
scene. In the present scenario, due to the availabil-
ity of cheap and accurate 3D scanners in the Robotics
and Vision labs, it is possible to easily acquire accu-
rate 3D models; which makes our recognition system
quite effective. Also, other than the large variety of
easily available 3D scanning hardwares (D’Apuzzo,
2006), simple software solutions for 3D acquisition
is available where 3D models can be acquired using
off-the-shelf hardware (3Digify, 2015).
2 RELATED WORK
We provide in this section the literature review about
topics which touches different aspects of our work.
We start by providing details of CNN based classifi-
cation systems followed by the work which augment
the existing dataset by the rendering of 3D models -
the place where we got the inspiration of our work.
We will then shortly describe the classical work in
the direction feature based recognition as our work
is logically similar to them. We then finish by pro-
viding some details about systems which purely fo-
cus on shape classification. They are technically very
similar to our work, but instead of the recognition of
3D models in 2D images, they perform shape or 3D
model classification.
2.1 CNN based Object Classification
Convolutional neural networks (CNNs) are feedfor-
ward neural networks with convolutional layers (a
layer with a small filter sharing its weights through-
out its input volume) in them which first appeared in
(Lecun et al., 1998). With the availability of larger
training data such as ImageNet (Russakovsky et al.,
2015), it became possible to train deeper network.
The first popular CNN was the AlexNet (Krizhevsky
et al., 2012) which own the ImageNet challenge by a
large margin inspiring a large amount of work in this
direction. For object detection these networks were
applied to object regions for the presence and absence
of an object (Girshick et al., 2014; Girshick, 2015;
Ren et al., 2015). These CNN based techniques re-
mains the current state of the art for object detection
in 2D images and image classification. Because of
its high success in image classification, we use deep
CNN in our training architecture. In particular, due to
its simplicity, we use the configuration of AlexNet in
our network and fine-tune the weights based on our
requirements.
2.2 Data Augmentation for Learning
These methods renders 3D models using some ren-
dering techniques and uses the rendered images as
training data to 2D techniques. The popular work in
this direction is chair detection using exampler SVMs
(Aubry et al., 2014). The more recent works use this
rendering technique to augment existing 2D image
dataset and perform CNN based detection on the aug-
mented dataset. (Peng et al., 2014) used rendering of
similar looking 3D models of some of the categories
of PASCAL VOC dataset (Everingham et al., 2010)
to augment the training dataset, and found it to per-
form superior than only training on the given train-
ing set. (Su et al., 2015b) used image of rendered
3D models to augment PASCAL 3D+ dataset to im-
prove results on viewpoint detection. Our contribu-
tions here are deeply inspired by these works. But
instead of augmenting existing training dataset with
rendered images to improve accuracy, we create the
entire training dataset out of the rendered images and
perform training on them for the recognition task. We
Trained 3D Models for CNN based Object Recognition
131
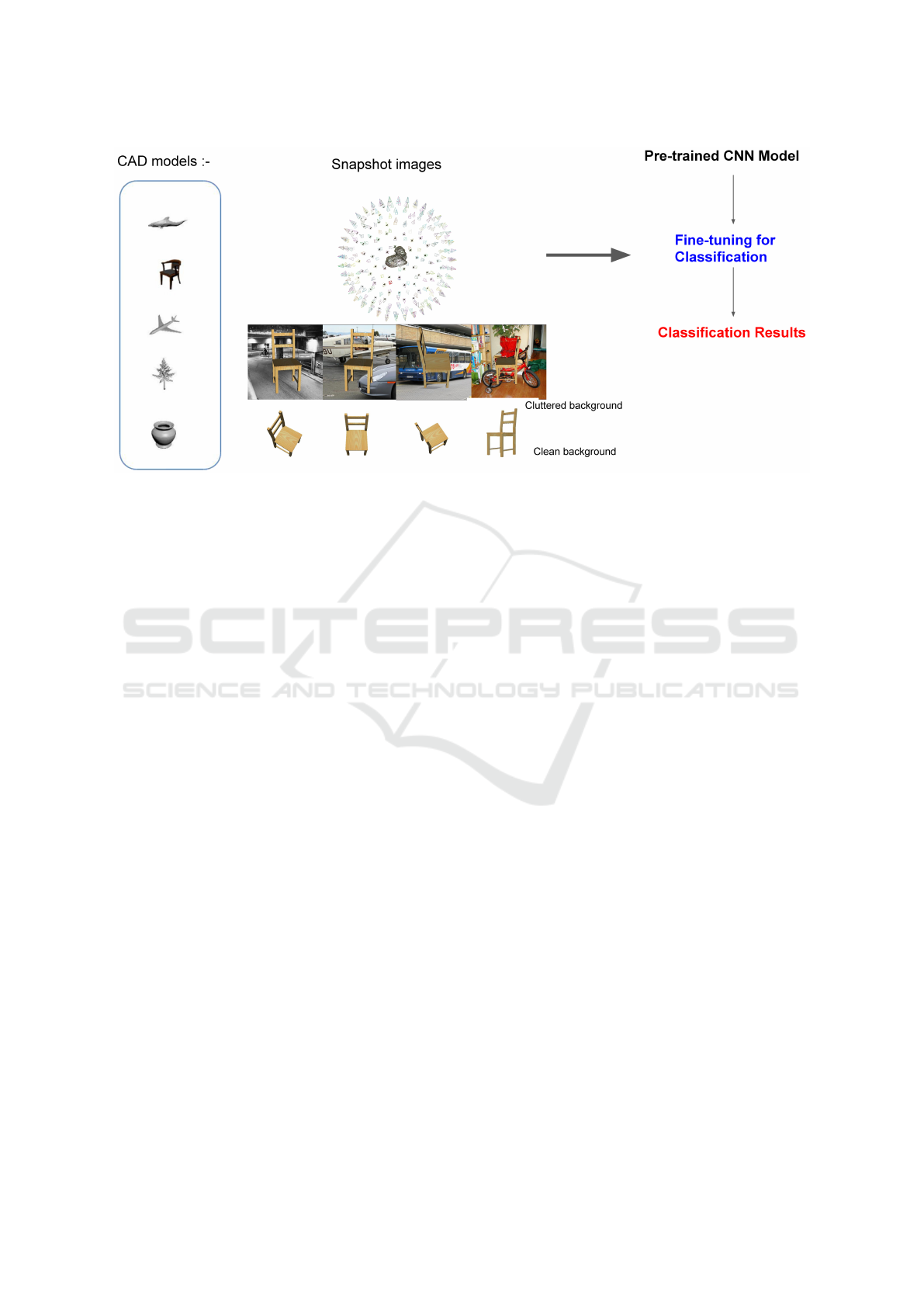
Figure 1: Summary of CNN based detection of CAD models in 2D images.
show in the this paper that when the 3D models for
the recognition system is highly accurate resembling
the real object - which is the case for feature based ob-
ject recognition system, performing training only on
the synthetic images is sufficient for achieving a good
recognition accuracy.
2.3 Feature based Object Recognition
Feature-augmented 3D models are created by per-
forming Structure From Motion (SFM) on the train-
ing images taken of the object to be recognized. This
association of 3D points - to - 2D descriptors, as a re-
sult of SFM, forms the pillar of most of the feature
based detection, where the features extracted from a
given input image, are matched to that of the feature
augmented 3D models and subsequently, a 6 DOF
recognition is made (Skrypnyk and Lowe, 2004; Hao
et al., 2013; Collet Romea et al., 2011; Collet Romea
and Srinivasa, 2010; Irschara et al., 2009). (Sarkar
et al., 2016) provided a new way of creating feature-
augmented models in the presence of accurate 3D
models at the training time. They used the texture-
map of the 3D models to assign 2D features to the
3D points of the model, and in the second way, took
rendered virtual snapshots to group 2D features as-
signing to the 3D points. Our method is logically
similar to this work, because of the fact that we only
use 3D models for training for the object recognition.
Quantitatively, we significantly outperform the result
of recognition accuracy of this work.
2.4 Shape Classification using Rendered
Images
Shape classification is the problem of classifying
shapes (3D models) from a database of 3D mod-
els. MVCNN (Su et al., 2015a), the state-of-the-art
method for shape classification, renders 3D models
or shapes from different views, and performs training
on the rendered images for the task of classification.
This conveys the information that training just on the
rendered images can be powerful. We use a similar
training technique, but instead of performing shape
classification, we solve the problem of object recog-
nition in given 2D images.
3 TRAINING 3D MODELS
We perform the task of object recognition in images.
Given a dataset of 3D models representing the object
to be recognized, and input query images containing
an instance of an object, the problem is to find the
correct 3D model present in the image. Here, the in-
put query images are available only during the test
time. We process on the database of 3D models, per-
form training, and use the trained model for perform-
ing recognition during the test time.
In summary, our procedure consists of taking vir-
tual snapshots of each object from different views, use
the snapshots to fine-tune an existing CNN models.
Figure 1 summarizes the procedure.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
132

Figure 2: Rendering technique used for generating virtual snapshots. An icosaheadron is recursively subdivided, virtual
cameras are placed in the center of its face and is pointed towards the 3D model placed at the center of the polyhendron to
take virtual snapshots
1
.
3.1 Rendering Techniques
3.1.1 Rendering Views
Our CNN model trains on the virtual snapshots of
the 3D model. Therefore, the set of virtual snapshots
should cover a good variations in terms of viewpoints,
in order for the CNN to perform well on a real query
image during the test time. Thus, we intend to take
snapshots of the 3D model from all possible direc-
tions. This is unlike (Peng et al., 2014) where 4-
5 manually chosen views were used to augment the
training set. This is because, our training set is lim-
ited to the rendered images and we intend to capture
maximum information possible in this set.
To achieve this, we place the model in the ori-
gin and point the camera towards the model from a
set of uniformly discretized rotation angles. We do
this by placing the virtual camera at the faces (or ver-
tices) of a tesselated icosaheadron as icosaheadron is
the largest convex regular polyhedron with 20 faces.
Tesselation level of n which subdivides a triangle into
4 triangles recursively n times, providing us with the
parameter to control the number of views. We also
observed that rendering a model from the bottom of
its upright position does not provide us with useful
views of the object. In fact, many times the bottom of
the model do not resemble the actual object at all, giv-
ing rise to confusion to the learning algorithm. There-
fore, we only consider the top half of the tesselated
icosaheadron for taking the virtual snapshots. Note
that this assumes that the models are provided in their
upright position and are normalized in a unit cube.
Considering only the top half of the tesselated
icosaheadron for placing the virtual camera for gen-
erating the views, the tesselation level of 0, 1 and 2
provides us with 10, 40 and 160 images. The proce-
dure is summarized in Figure 2.
3.1.2 Background Images
It is observed that the system performs better in the
cluttered scene when some background is introduced
in the rendered images. The effect of the background
based on the dataset is more elaborated in the Results
section. In our rendering, we used both white back-
ground and real images as background. Because of
the fact that our models are indoor, we chose back-
grounds resembling indoor scene. We considered few
categories in the PASCAL dataset which are generally
present indoors (Example - Television), but do not re-
semble any of the categories of our 3D models to be
recognized to avoid conflicts. We then use the im-
ages in these categories to create background images
for our training set. To show the effect of the back-
ground we perform experiments with different combi-
nation of rendered and white background as explained
in Section 4.2.
3.1.3 Rendering Scheme
We use the default rendering settings of Visualiza-
tion Toolkit (VTK) (VTK, ), which uses a directional
headlight located at the center of the camera and
Phong shading interpolation. We render the model
with and without texture to show that for highly ac-
curate models the presence of texture do not accuracy
significantly.
3.2 CNN Framework
3.2.1 Framework
We use the eight layer ‘AlexNet’ ((Krizhevsky et al.,
2012)) as our neural network architecture for train-
ing and testing because of its popularity and simplic-
ity. Though recent deep networks like VGGNet (Si-
monyan and Zisserman, 2014), or more recent (He
1
Generated from https://www.openprocessing.org/
Trained 3D Models for CNN based Object Recognition
133
#objects
Slow learning
Fast learning
fc_hidden
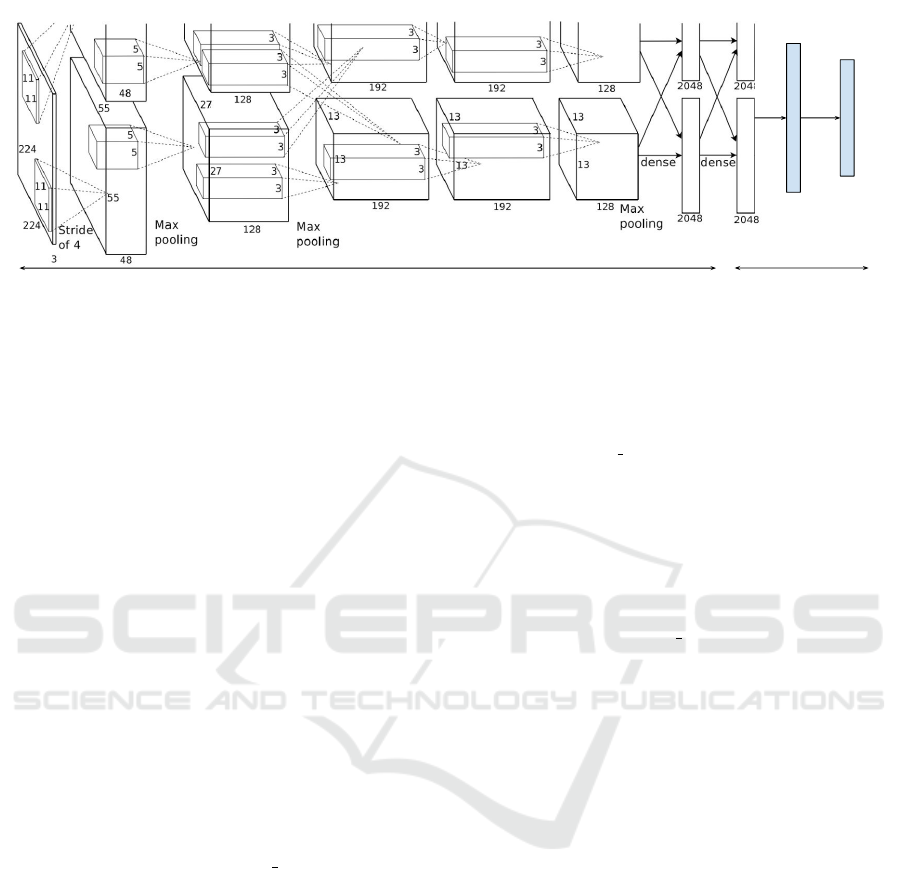
Figure 3: AlexNet architecture, which is used for our evaluation. We fine-tune a pre-trained AlexNet model for our object
recognition problem by learning faster on the last fully connected layer while performing a slow weight update in the hidden
layers. The image of AlexNet is taken from (Krizhevsky et al., 2012) and is modified to show its use for the classification of
n number of object in our pipeline. Blue blocks show the additional layers.
et al., 2015) should work better. In our experiments on
the dataset by (Sarkar et al., 2016) with 7 categories,
we found AlexNet to be sufficient for the recognition
task.
The architecture of the network is shown in the
Figure 3. The network takes a fixed size 227 × 227
RGB images as input, feeds it through 5 convolu-
tional layers (with max-pool layers after first, second
and the last layers) followed by three fully connected
(FC) layers of 4096, 4096 and 1000 neurons respec-
tively, to produce a score for each of the 1000 class
it was originally intended to use. To use it for our
purpose for recognizing n objects, we change the last
layer to have only n neurons. To replace AlexNet with
another pre-trained network, one needs to follow the
same step of replacing the last layer to have the num-
ber of neurons same as the number of object. We keep
the SoftMax layer as used by AlexNet for classifica-
tion of the object. We optionally add another layer
before the last layer and call it fc hidden as it shows
to increase the accuracy.
3.2.2 Training
For training, we essentially fine-tune a pre-trained
AlexNet model for the purpose of category detection.
More elaborately, we take a trained model of AlexNet,
replace the last fully connected (FC) layer to contain
the same number of neuron as the number of our cat-
egories, and initialize them with random weights. We
then learn the entire network end-to-end by backprop-
agation with SoftMax classification error, and update
the weights of the last fully connected layers 10 times
faster than the weights in the other layers. This causes
the last FC layer to learn and adapt to our categories
while enabling a slow adaptation of the hidden layers
towards the synthetic data.
Our experimentation shows that introduction of a
new FC layer (fc hidden) before the final classifier
while doing a slow update throughout the network -
which is similar to learning of a fully connected neu-
ral network classifier on the FC7 features, increases
the accuracy compared to the one without the new
layer. This is due to the fact that the hidden layer
causes the network to have non-linearity than training
only the last layer. However, a fast update on FC7
without the addition of fc hidden performs very simi-
lar. This is due to the fact that FC7 now introduces
the nonlinearity providing a fully connected neural
network working on the FC6 features. We chose this
setting for our experiments because of its simplicity.
The architecture is shown in Figure 3 where we in-
clude the hidden layer as it is a viable option. We also
found the method of fine-tuning all the layers perform
better than freezing all but the last one.
4 EXPERIMENTAL RESULTS
4.1 Dataset
We use the subset of the the dataset provided by
(Sarkar et al., 2016) to test our system. In brief the
dataset we considered contains 5 textured meshes -
Lion, Totem, Matriochka, Milk-carton and Whitener
and a set of test images. The test image set contains
in total around 3000 images of the real objects corre-
sponding to the provided meshes. The meshes repre-
sents accurate version of the real objects and has been
reconstructed by the scanner 3Digify (3Digify, 2015).
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
134

Table 1: Comparison of object recognition recall with our system, local feature based using MOPED (Collet Romea et al.,
2011) and local feature based using textured 3D models (Sarkar et al., 2016). Section 4.2 explains the settings used in our
methods. Note that we only show the results of recognition recall of these two objects while considering recognition between
5 models explained in 4.1.
Milk-carton Lion
txtmap (Sarkar et al., 2016) +
MOPED (Collet Romea et al., 2011)
0.71 0.63
Manual SFM +
MOPED (Collet Romea et al., 2011)
0.86 0.70
tmap (Sarkar et al., 2016) +
PnP + RANSAC
0.55 0.72
ours - R-BG + W-BG + Full texture 0.98 0.76
ours - W-BG + Full texture 0.80 0.42
ours - C-BG + W-BG + Full texture 0.81 0.74
ours - C-BG + W-BG + WO texture 0.45 0.20
ours - C-BG + Full texture 0.80 0.67
4.2 Rendering Settings
Background and Texture. We performed different
experiment which gives insight to the results of the
learning algorithm with respect to the rendering tech-
niques. The different methods considered are de-
scribed below:
• R-BG Rendered with random indoor background
taken from indoor categories of PASCAL dataset.
• W-BG Rendered with white background.
• R-BG + W+BG Rendered with random indoor
background and white background together.
• C-BG Rendered with chosen background similar
to that of test images. Here we took 10 - 15 images
of a table and used them as background.
• Full Texture Rendered with full texture.
• WO Texture Rendered without any texture.
Number of Images. We found that when the vir-
tual snapshots were are taken from varying distance
from the camera, the results were better. Therefore,
we follow the technique in Section 3.1.1 and took
snapshots at 7 different distances (radius of tesselated
icosaheadron) with the tesselation level of 1 - which
gives a total training image set of around 300 image
per background settings. We found that increasing the
tesselation level to higher level do not improve the ac-
curacy.
4.3 Comparing Algorithms
We use two models Lion and Milk-Bottle to compare
our results with local-feature based object recognition
results. For creating feature-augmented models, we
considered both the Structure From Motion approach
(Eg - (Collet Romea et al., 2011)) and Model based
approach from (Eg - (Sarkar et al., 2016)). We limited
to these two models as building feature-augmented
models from SFM has a large manual overhead. Also,
more images of these models in the test-image-set in
our dataset made it possible to create a robust feature-
augmented model from SFM.
For online phase or matching phase we considered
PNP + RANSAC (solution of Perspective-n-Points
problem under RANSAC iterations) and MOPED
(Collet Romea et al., 2011) framework.
4.4 Comparison
The detailed comparison of our approach to existing
approaches is shown in Table 1. The table shows the
advantages of our method over the existing texture
based recognition approaches. It is seen that the com-
bination C-BG + W-BG + Full texture works the best
in our case giving the best accuracy. Note the setting
R-BG + W-BG + Full texture is equally effective and
gives a better recall value for Lion and Milk-carton;
though the overall accuracy over the dataset of this
method is slightly less.
Table 2 shows the comparison of our approach to a
previous model based approach which uses local fea-
tures. Here, we chose our best settings of C-BG +
W-BG + Full texture.
As seen from the experiments, texture seem to
have effect in our training - and so does the back-
ground. This is true specially for high textured mod-
els such as Lion and Matriochka. Figure 4 shows
some of the example recognition. The erroneous
cases show the contribution of the background for er-
ror. This and the quantitative analysis makes us con-
clude that for a cross domain learning scenario, it is
best to include maximum variations in the training im-
age set.
Trained 3D Models for CNN based Object Recognition
135

(a) Positive recognition of instances
(b) Incorrect recognitions - from left to right, top to
bottom - (predicted, actual)
[(’Lion’, ’matriuschka’), (’matriuschka’, ’Lion’),
(’matriuschka’, ’Totem’), (’matriuschka’, ’Totem’),
(’milkbottle’, ’whitener’), (’whitener’, ’Lion’),
(’Totem’, ’Lion’), (’Totem’, ’Lion’), (’matriuschka’,
’Totem’), (’matriuschka’, ’Totem’)]
Figure 4: Example recognition. (Left) Positive recognition of instances. (Right) Example erroneous detection. Note the effect
of the background affecting recognition.
Table 2: Comparison of object recognition recall with our
system and local feature based using textured 3D models
(snap2 & tmap) (Sarkar et al., 2016). Here ours use the
settings C-BG + W-BG + Full texture.
Models snap2 tmap our
Milk-carton 0.88 0.71 0.81
Totem 0.83 0.21 0.98
Lion 0.89 0.63 0.74
Whitener 0.48 0.63 0.77
Matriochka 0.58 0.62 0.64
5 CONCLUSION
We have presented a method of using only 3D mod-
els for learning CNN architecture for the purpose of
object detection. We showed that in case of accurate
models and uncluttered test images, our method can
be successfully applied with a very high accuracy in
results. The problem arises in the absence of accurate
3D models, or in the case when the 3D model cov-
ers a broad category instead of a single recognition
instance. In those case there is a missing domain gap
which needs to be fulfilled. With this paper we have
identified the following promising set of future work:
1. Identifying the domain gap between the features
in rendered images and real images with some of
the recent works, such as (Sun et al., 2015; Tzeng
et al., 2014; Long and Wang, 2015), and apply
domain transfer for improving the accuracy.
2. Use of photorealistic rendering to decrease the do-
main gap.
3. Finding camera viewpoint, or performing 6DOF
object recognition for accurate 3D models using
CNN, thereby creating a recognition system as
complete as the local feature based systems like
(Sarkar et al., 2016; Collet Romea et al., 2011)
enabling its usage in robotics application such as
grasping.
ACKNOWLEDGEMENTS
This work was partially funded by the BMBF project
DYNAMICS (01IW15003).
REFERENCES
3Digify (2015). 3digify, http://3digify.com/.
Aubry, M., Maturana, D., Efros, A., Russell, B., and Sivic,
J. (2014). Seeing 3d chairs: exemplar part-based 2d-
3d alignment using a large dataset of cad models. In
CVPR.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
136

Biederman, I. (1987). Recognition-by-components: a the-
ory of human image understanding. Psychological re-
view, 94(2):115.
Collet Romea, A., Martinez Torres, M., and Srinivasa, S.
(2011). The moped framework: Object recognition
and pose estimation for manipulation. International
Journal of Robotics Research, 30(10):1284 – 1306.
Collet Romea, A. and Srinivasa, S. (2010). Efficient multi-
view object recognition and full pose estimation. In
2010 IEEE International Conference on Robotics and
Automation (ICRA 2010).
D’Apuzzo, N. (2006). Overview of 3d surface digitization
technologies in europe. In Electronic Imaging 2006,
pages 605605–605605. International Society for Op-
tics and Photonics.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., and Zisserman, A. (2010). The pascal visual ob-
ject classes (voc) challenge. International Journal of
Computer Vision, 88(2):303–338.
Fei-Fei, L. (2006). Knowledge transfer in learning to recog-
nize visual objects classes. In Proceedings of the Fifth
International Conference on Development and Learn-
ing.
Fei-Fei, L., Fergus, R., and Perona, P. (2006). One-
shot learning of object categories. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
28(4):594–611.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Girshick, R. B. (2015). Fast R-CNN. CoRR,
abs/1504.08083.
Hao, Q., Cai, R., Li, Z., Zhang, L., Pang, Y., Wu, F., and
Rui, Y. (2013). Efficient 2d-to-3d correspondence fil-
tering for scalable 3d object recognition. In Computer
Vision and Pattern Recognition (CVPR), 2013 IEEE
Conference on, pages 899–906.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Irschara, A., Zach, C., Frahm, J.-M., and Bischof, H.
(2009). From structure-from-motion point clouds to
fast location recognition. In Computer Vision and
Pattern Recognition, 2009. CVPR 2009. IEEE Con-
ference on, pages 2599–2606.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Pereira, F., Burges, C. J. C., Bottou,
L., and Weinberger, K. Q., editors, Advances in Neu-
ral Information Processing Systems 25, pages 1097–
1105. Curran Associates, Inc.
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Long, M. and Wang, J. (2015). Learning transferable
features with deep adaptation networks. CoRR,
abs/1502.02791, 1:2.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Peng, X., Sun, B., Ali, K., and Saenko, K. (2014). Explor-
ing invariances in deep convolutional neural networks
using synthetic images. CoRR, abs/1412.7122.
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
R-CNN: towards real-time object detection with re-
gion proposal networks. CoRR, abs/1506.01497.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Sarkar, K., Pagani, A., and Stricker, D. (2016). Feature-
augmented trained models for 6dof object recognition
and camera calibration. In Proceedings of the 11th
Joint Conference on Computer Vision, Imaging and
Computer Graphics Theory and Applications, pages
632–640.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
CoRR, abs/1409.1556.
Skrypnyk, I. and Lowe, D. (2004). Scene modelling, recog-
nition and tracking with invariant image features. In
Mixed and Augmented Reality, 2004. ISMAR 2004.
Third IEEE and ACM International Symposium on,
pages 110–119.
Snavely, N., Seitz, S. M., and Szeliski, R. (2006). Photo
tourism: Exploring photo collections in 3d. ACM
Trans. Graph., 25(3):835–846.
Snavely, N., Seitz, S. M., and Szeliski, R. (2008). Model-
ing the world from internet photo collections. Int. J.
Comput. Vision, 80(2):189–210.
Su, H., Maji, S., Kalogerakis, E., and Learned-Miller, E. G.
(2015a). Multi-view convolutional neural networks
for 3d shape recognition. In Proc. ICCV.
Su, H., Qi, C. R., Li, Y., and Guibas, L. J. (2015b). Render
for cnn: Viewpoint estimation in images using cnns
trained with rendered 3d model views. In The IEEE
International Conference on Computer Vision (ICCV).
Sun, B., Feng, J., and Saenko, K. (2015). Return of frustrat-
ingly easy domain adaptation. CoRR, abs/1511.05547.
Tzeng, E., Hoffman, J., Zhang, N., Saenko, K., and Darrell,
T. (2014). Deep domain confusion: Maximizing for
domain invariance. CoRR, abs/1412.3474.
VTK. Visualization toolkit (vtk), http://www.vtk.org/.
Trained 3D Models for CNN based Object Recognition
137
