
Smart Grid Communication Middleware Comparison
Distributed Control Comparison for the Internet of Things
Bo Petersen
1
, Henrik Bindner
1
, Bjarne Poulsen
2
and Shi You
1
1
DTU Electrical Engineering, Technical University of Denmark, Anker Engelunds Vej 1, 2800, Kgs. Lyngby, Denmark
2
DTU Compute, Technical University of Denmark, Anker Engelunds Vej 1, 2800, Kgs. Lyngby, Denmark
Keywords: Smart Grid, Internet of Things, Communication Middleware, RMI, XML-RPC, CORBA, ICE, Web Services,
OPC UA, XMPP, WAMP, YAMI4, ZeroMQ.
Abstract: Communication between Distributed Energy Resources (DERs) is necessary to efficiently solve the
intermittency issues caused by renewable energy, using DER power grid auxiliary services, primarily load
shifting and shedding. The middleware used for communication determines which services are possible by
their performance, which is limited by the middleware characteristics, primarily interchangeable serialization
and the Publish-Subscribe messaging pattern. The earlier paper “Smart Grid Serialization Comparison”
(Petersen et al. 2017) aids in the choice of serialization, which has a big impact on the performance of the
communication as a whole. This paper identifies the dis-/advantages of the different middleware, shows that
there are better alternatives to Web Services and XMPP, and gives guidance in choosing the most appropriate
middleware depending on the context. YAMI4 and ZeroMQ are generally the strongest candidates for Smart
Grid distributed control, but WAMP should also be considered in the future.
1 INTRODUCTION
With an increased share of Renewable Energy in the
future Smart Grid, the problems caused by
Renewable Energy producing energy intermittently
have to be solved to ensure an efficient and reliable
supply of energy.
The most efficient solution to solve these
problems is to match the energy consumption to the
production by moving the consumption and
production of energy. This is done by controlling the
DERs, requiring communication to exchange
measurements and react to control commands.
The communication middleware used is important
for the success of communication measured by the
probability of delivery within the timeframe defined
by the power grid service offered by the DERs.
Which in the case of frequency corrections and load
shedding is milliseconds to minutes, while for load
shifting it is minutes to days.
In the context of the Internet of Things, with
hardware constrained System on Chip (SoC) devices
and low bandwidth data connections for the DERs,
the use of efficient middleware is essential for
achieving a high probability of delivery within short
timeframes.
The use of certain middleware is advocated for by
the prevalent communication standards, including
IEC 61850 (Mackiewicz 2006), OpenADR
(McParland 2011) and the Common Information
Model (Uslar et al. 2010).
An important part of the communication is the
serialization used with the middleware, covered in the
previous paper “Smart Grid Serialization
Comparison” (Petersen et al. 2017).
The current state of the art is a handful of papers
(Albano et al. 2015) (Qilin and Mintian 2010)
(Dworak et al. 2011). These are limited by the
available middleware at the time, the limited number
of middleware compared, the lack of Smart Grid
characteristics considered and the lack of
recommendations for the choice of middleware.
The hypothesis of this paper is that there are better
alternatives than the middleware advocated for by the
prevalent communication standards, especially
considering constrained SoC devices and low
bandwidth data connections.
The aim of the paper is to compare the
possibilities of middleware primarily for distributed
control, to show the dis-/advantages of a broad range
of middleware, and provide guidance in choosing the
most appropriate middleware for the given use case.
Petersen, B., Bindner, H., Poulsen, B. and You, S.
Smart Grid Communication Middleware Comparison - Distributed Control Comparison for the Internet of Things.
DOI: 10.5220/0006303302190226
In Proceedings of the 6th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS 2017), pages 219-226
ISBN: 978-989-758-241-7
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
219
2 METHODS
The comparison is done in Java, as most middleware
is available for Java.
2.1 Middleware Choices
Choosing the best composition of communication
middleware for the comparison is important to give
the best guidance in choosing the right middleware
and to show that there are better alternatives to the
middleware advocated for by the prevalent
communication standards.
Web Services (W3C 2016) and XMPP (XSF
2016) are included because of these communication
standards. Jetty (Eclipse 2016) Web Services are
used, because Jetty is one of the most prominent
embedded Java web servers, and an embedded web
server is a requirement for distributed systems.
Vysper (Apache Mina 2016) and Smack
(Realtime Ignite 2016) have been used for XMPP as
Vysper is the only embedded Java XMPP server, and
Smack is one of the most widely used Java XMPP
clients.
OPC UA is included primarily because of its
heavy use in industrial automation and because of a
number of scientific articles (Lehnhoff et al. 2011)
(Srinivasan et al. 2013) proposing its use with IEC
61850. Prosys OPC UA (Prosys 2016) is used
because it is one of the few mature Java OPC UA
SDK’s.
Oracle RMI (Oracle 2016), Apache XML-RPC
(Apache 2016) and Oracle CORBA (OMG 2016) are
included because of their heavy use in distributed
systems, along with ZeroC ICE (ZeroC 2016) which
is a mature modern middleware with promising
performance.
As oppose to the previously mentioned
middleware, which are well-established mature
technologies and have been in use for years, a number
of new modern middleware have been included.
ZeroMQ (iMatix 2016) have been included to
show the capabilities of message queue middleware
while avoiding the use of a broker (used by most other
message queue middleware), which is ill-suited for
distributed systems. JeroMQ (JeroMQ 2016) was
chosen because it is the only native Java
implementation of ZeroMQ and still has excellent
performance.
WAMP (Tavendo 2016) is included to show the
capabilities of using Web Sockets. WAMP is used for
Web Sockets because it adds an API layer for
Request-Reply and Publish-Subscribe, as oppose to
using raw binary Web Sockets. Jawampa
(Matthias247 2016) is used because it is the only
native Java implementation.
Inspirel YAMI4 (Inspirel 2016) is included
because it is a really interesting project that is built
specifically for cyber-physical systems with a strong
performance, message prioritization, and restricted
memory consumption specifically designed for
constrained SoC devices.
2.2 Performance Comparison
For the quantitative performance comparison for
Smart Grids, three messaging patterns (Request-
Reply, Push-Pull, and Publish-Subscribe) are used.
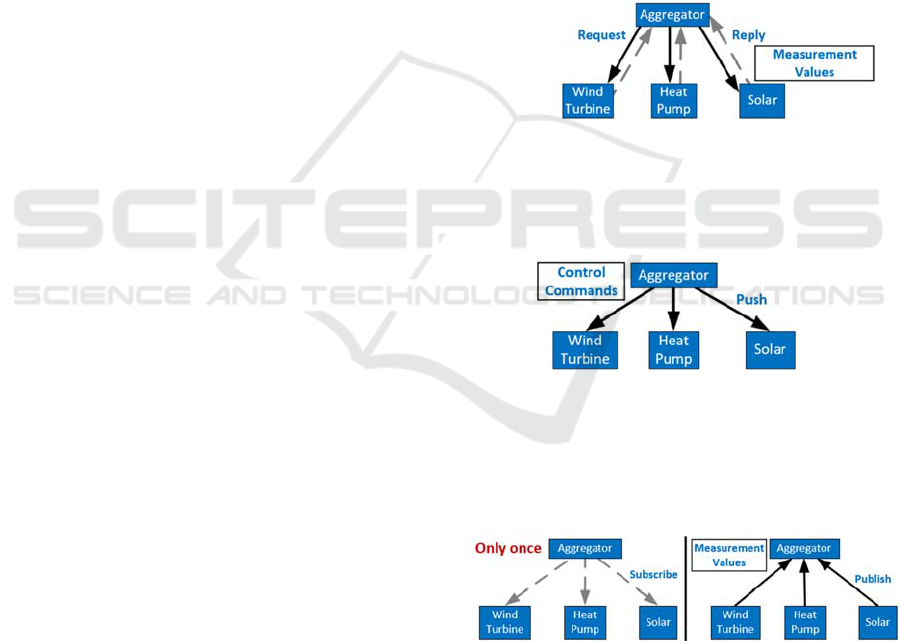
Request-Reply (figure 1) is used with older
middleware to poll for measurement data, without
knowing when new measurements are available.
Figure 1: Request-Reply messaging pattern.
Push-Pull (figure 2) is used to send control commands
to a device, preferably asynchronously, with only an
acknowledgment of receipt returned.
Figure 2: Push-Pull messaging pattern.
Publish-Subscribe (figure 3) is used to subscribe to
measurement data, with the data returned when new
data is available, which makes this pattern much more
efficient than Request-Reply.
Figure 3: Publish-Subscribe messaging pattern.
For middleware supporting Publish-Subscribe, a
combination of Publish-Subscribe and Push-Pull
should be used for measurement data retrieval and
delivery of control command, while for the other
middleware a combination of Request-Reply, and
Push-Pull, must be used instead.
SMARTGREENS 2017 - 6th International Conference on Smart Cities and Green ICT Systems
220

Three different message sizes (1 kB, 10 kB, and 20
kB) are used for the comparison. They are chosen to
cover the range of message sizes generated by
serialization of IEC 61850 data model classes from
the previous paper “Smart Grid Serialization
Comparison” (Petersen et al. 2017), which generate
output in the range between 2 and 12 KB.
Both string and binary message types are used,
because serialization creates either string or binary
output, with some middleware handling binary
messages more efficiently and some only supporting
string messages.
The performance measurements primarily consist
of the average number of messages that can get from
one device to another during a unit of time
(throughput) and the average time it takes to get a
message from one device to another (latency).
While measuring the throughput and latency, the
package loss is measured in the form of the
percentage of messages not received, and the memory
is measured by the consumption during the whole test
run for a given middleware.
To summarize, performance is measured for each
middleware for the following:
Throughput by size (1 kB, 10 kB, 20 kB),
message type (string, binary), and messaging
pattern (Request-Reply, Push-Pull, Publish-
Subscribe).
Latency by size (1 kB, 10 kB, 20 kB), message
type (string, binary), and messaging pattern
(Request-Reply, Push-Pull, Publish-Subscribe).
Package loss by messaging pattern (Request-
Reply, Push-Pull, Publish-Subscribe)
Memory use by server and client.
The test was performed with two Raspberry Pi 3’s
(model B), with one running the server, as a DER,
supplying measurement values, receiving control
commands, and the other running the client, as an
aggregator, getting measurement values, sending
control commands.
The devices are connected by a 1 Gbit Ethernet,
with 100 Mbit network interfaces, which ensures that
the only limiting factor for throughput is the devices.
Because of the limitation of the 100 Mbit
bandwidth, the theoretical maximum bandwidth
utilization allows for 12500 messages of 1 kB/s,
which is 12.5 MB/s.
The data loss is measured by the percentage of the
total amount of messages not delivered for the 6 tests
(String 1 kB, String 10 kB, String 20 kB, Binary 1 kB,
Binary 10 kB and Binary 20 kB) for each messaging
pattern (Request-Reply, Push-Pull, and Publish-
Subscribe).
The memory consumption is measured for each
middleware, by taking the memory used after setting
up the tests, but before initializing the middleware
and running the tests, and comparing it to the memory
consumption after all tests.
2.3 Characteristics Comparison
The qualitative characteristics comparison compares
the capabilities of the middleware and development
related characteristics that should be considered along
with the performance of the middleware.
One thing that is particularly important for certain
Smart Grid use cases is message prioritization to
ensure that control commands can get through even
with a high amount of traffic.
The messaging patterns supported by the
middleware are very important for use cases with
high network utilization and a requirement for fast
control command delivery.
Interchangeable serialization is important because
middleware that supports it generally has a higher
throughput and lower latency because serialization
that is more efficient can be used.
Middleware that can run on SoC devices and scale
to a high degree of traffic, because of their limited
consumption of memory, is essential for distributed
control systems, which use constrained SoC devices.
For the development related characteristics, the
available resources in the form of documentation, the
development effort needed, the size of the community
(mailing lists, Q & A’s, tutorials, etc.) and the license
are important to consider.
To sum up, the following characteristics are
compared:
Message prioritization
Messaging patterns
Interchangeable serialization
SoC scalability
Resource quality
Development effort
Community size
License
3 RESULTS
When interpreting the results, and deciding on the
middleware to use it is important to first consider the
characteristics of the middleware and then the
performance needed for the given context.
Smart Grid Communication Middleware Comparison - Distributed Control Comparison for the Internet of Things
221
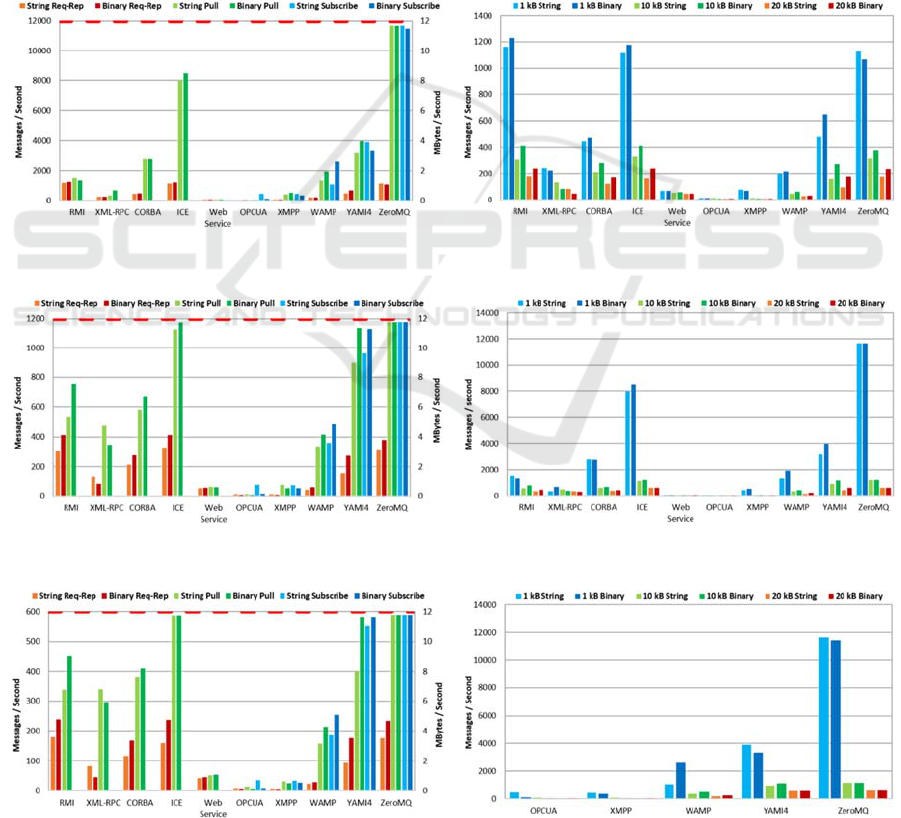
3.1 Performance Comparison
The average measured throughput seen in figure 4-9,
shows that binary data is more efficient for
middleware that supports it and that Publish-
Subscribe is much more efficient than Request-Reply.
Figure 10-15 shows the average latency, which is
in addition to serialization, except for XML-RPC,
XMPP, and WAMP that already serializes the
messages.
One of the most interesting performance results is
that the bandwidth utilization is quite stable between
10 kB and 20 kB message sizes for all messaging
patterns and message types, which can be seen by
comparing the throughput in MB/s between figure 5
& 6.
It should be noted that for OPC UA and XMPP the
test could only be run with 100 iterations because of
the memory consumption, which caused them to
crash with 1000 iterations.
The performance of ICE, YAMI4 and ZeroMQ is
especially impressive and for large messages, they all
reach the limits of the network bandwidth at around
12 MB/s with overhead.
It should also be noted that Request-Reply has to
transmit messages from the client to the server and
then back, which doubles the average latency for the
network, and reduces the theoretically possible
throughput compared to the other messaging patterns.
The performance also shows how the middleware
that does not support interchangeable serialization
Figure 4: Throughput (1 kB messages).
Figure 7: Throughput (Request-Reply pattern).
Figure 5: Throughput (10 kB messages).
Figure 8: Throughput (Push-Pull pattern).
Figure 6: Throughput (20 kB messages).
Figure 9: Throughput (Publish-Subscribe pattern).
SMARTGREENS 2017 - 6th International Conference on Smart Cities and Green ICT Systems
222
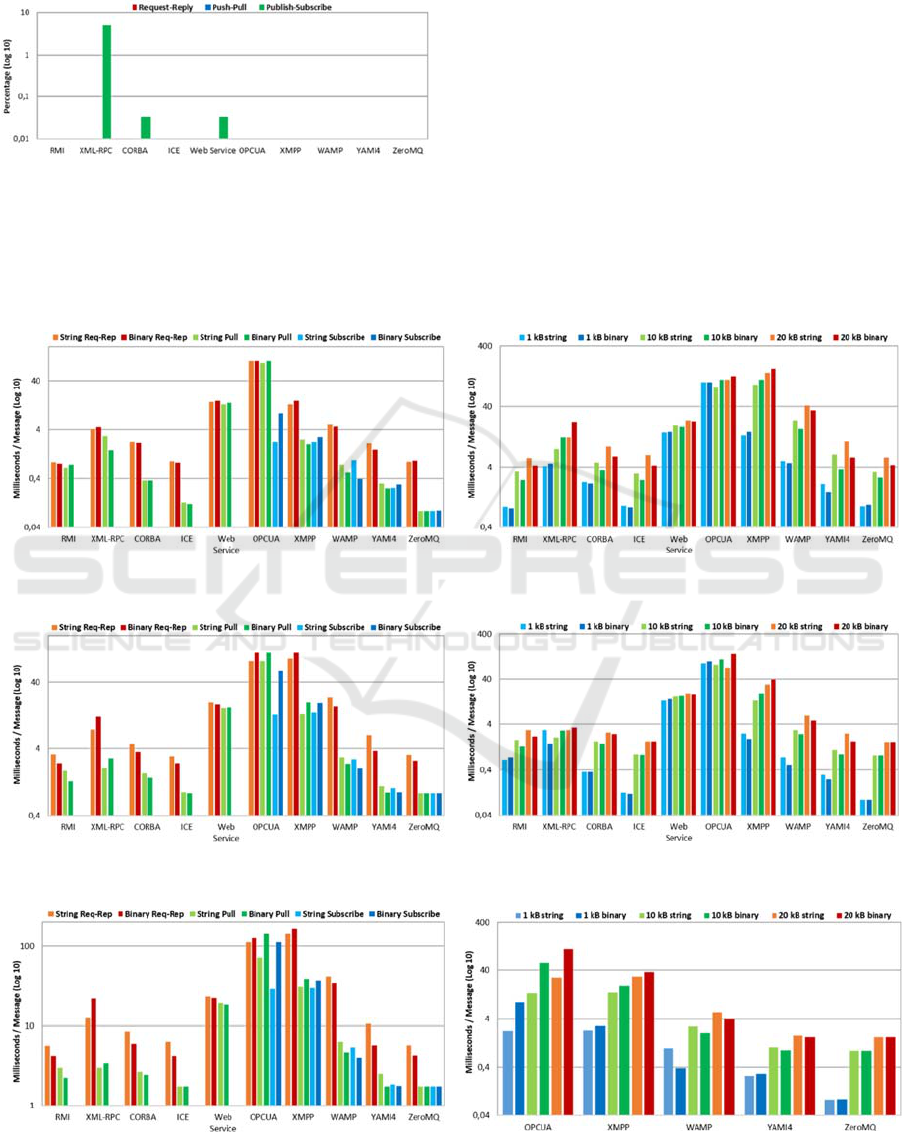
(XML-RPC, XMPP, and WAMP) pays the price for
serializing the already serialized data.
Figure 16: QoS Package loss.
The data loss can be seen in figure 16. Most
middleware delivered all messages during the
performance test. The test also shows that there is no
data loss for Request-Reply and Publish-Subscribe,
only for Push-Pull, and only for XML-RPC, CORBA
and Web services, which would not be the case
without a stable high-bandwidth data connection.
The memory consumption of the middleware is
shown in figure 17, which is important to run the
middleware on hardware constrained SoC devices.
Most middleware use less than 20 MB for the
server and client, with 3 of them using less than 2 MB,
which is quite impressive. XMPP uses much more
memory than the other middleware, which is
especially problematic seeing as it could only be
tested with 100 iterations because of its memory
consumption, which is also the case for OPC UA. On
the other hand, RMI, CORBA, and YAMI4 use
almost no memory, which makes them particularly
well suited for running on SoC devices.
Figure 10: Latency (1 kB messages).
Figure 13: Latency (Request-Reply pattern).
Figure 11: Latency (10 kB messages).
Figure 14: Latency (Push-Pull pattern).
Figure 12: Latency (20 kB messages).
Figure 15: Latency (Publish-Subscribe pattern).
Smart Grid Communication Middleware Comparison - Distributed Control Comparison for the Internet of Things
223
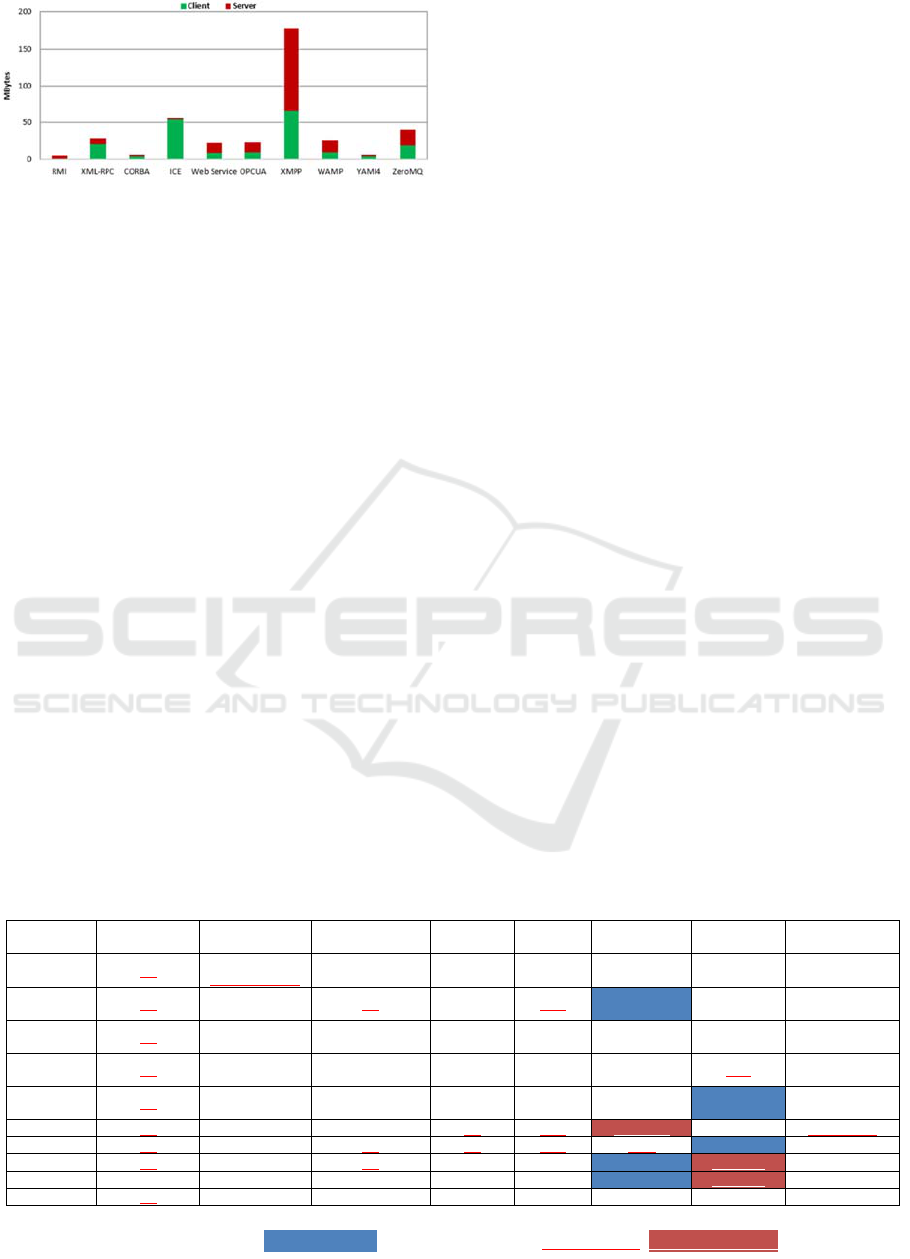
Figure 17: Memory use.
3.2 Characteristics Comparison
The comparison of middleware characteristics (table
1) shows what the middleware are capable of
natively.
Only YAMI4 natively support prioritization of
messages, which makes it especially suited for use
cases with a large bandwidth utilization for
measurement data exchange, and a requirement for
fast control command delivery.
Publish-Subscribe is only supported by half the
middleware, while all middleware, except RMI,
support Push-Pull asynchronously, both of which are
required to make efficient communication possible
and all support Request-Reply.
Interchangeable serialization is supported by all
middleware except XML-RPC and XMPP (which
only support XML), and WAMP (which only support
JSON and MessagePack).
Determining whether a middleware is scalable on
SoC devices, is quite subjective and for the test, SoC
scalability is based on whether they can do 1000
iterations on a Raspberry Pi 3, which OPC UA and
XMPP cannot.
The quality of the available resources (manual,
tutorials, examples), the required development effort
(based on implementation effort for the comparison),
and the size of the community (based on
StackOverflow.com and Google search) are quite
subjective and should be judges based on the given
use case.
The license of the middleware can be decisive in
the choice of middleware. Luckily, the only
middleware that is closed source and only available
with a paid license is OPC UA, while the only
middleware that requires a paid license for
commercial use are ICE and YAMI4.
4 DISCUSSION
When choosing the middleware, the first thing to
consider is the middleware characteristics, which
should be used to limit the number of middleware
candidates, and the performance comparison should
then be used to find the best candidates for the use
case.
4.1 Characteristics Comparison
The license is especially important for commercial
products, and the SoC scalability is essential for using
the middleware on SoC devices.
The development characteristics (resource
quality, development effort, and community size) is
especially important for small projects, but also for
bigger projects, because of maintainability.
Interchangeable serialization is very important to
achieve the highest throughput and lowest latency,
but require the serialization to be chosen carefully.
The Publish-Subscribe messaging pattern is
necessary for a high degree of measurement data
exchange, and for use cases where the DER getting
Table 1: Middleware characteristics.
Message
Prioritization
Messaging
Patterns
Interchangeable
Serialization
SoC
Scalability
Resource
quality
Development
effort
Community
size
License
RMI
No
Req.-Rep.
Sync. Push-Pull
Yes Yes
Medium Medium
High Oracle BCL
XML-RPC
No
Req.-Rep.
Push-Pull
No
Yes
Low
Very low
Medium
Apache v2
CORBA
No
Req.-Rep.
Push-Pull
Yes Yes High Low High Oracle BCL
ICE
No
Req.-Rep.
Push-Pull
Yes Yes High Low
Low
GPLv2
Web
Services
No
Req.-Rep.
Push-Pull
Yes Yes High
Medium
Very high Apache v2
OPCUA
No
All Yes
No
Low Very high Medium Commercial
XMPP
No
All
No
No Low High
Very high Apache v2
WAMP
No
All
No
Yes
Medium
Very low
Very low
Apache v2
YAMI4 Yes All Yes Yes High Very low
Very low GPLv3
ZeroMQ
No
All Yes Yes High Low High MPLv2
For easier reading: Big Advantage, Advantage, Neutral, Disadvantage, Big Disadvantage.
SMARTGREENS 2017 - 6th International Conference on Smart Cities and Green ICT Systems
224

data does not know how often data is sampled by the
DER supplying the measurement data. Also, the
Push-Pull pattern, with asynchronous push, is
important for use cases requiring middleware
supporting low latency control command.
Prioritization is important for getting control
commands delivered within the given timeframe
when large amounts of measurements are being
exchanged.
4.2 Performance Comparison
With the comparison of binary and string message
types, the increase in throughput for the middleware
is up to 40 percent for the majority of the tests as
shown in figures 4 - 9. But the real gain from using
binary messages comes from the smaller sizes
produced by the binary serializers which are up to 5
times smaller, than the corresponding string
serializers, as shown by the earlier paper “Smart Grid
Serialization Comparison” (Petersen et al. 2017).
Because of the stable bandwidth utilization, the
gain from the messages being up to 5 times smaller
with binary serialization means that the throughput is
increased by up to 5 times. In addition to the up to 40
percent increase in throughput because of the
middleware being faster with serialization, the total
gain from using binary serialized data with an
interchangeable serialization middleware is up to 7
times higher throughput.
The gain from using modern middleware also
comes from them supporting the Publish-Subscribe
messaging pattern which results in around 2-3 times
higher throughput which is shown in figures 4 - 6 by
comparing the throughput of Publish-Subscribe for
the 5 middleware that support it to the throughput of
Request-Reply for all the middleware.
This gain in throughput for Publish-Subscribe is
in addition to the advantage of avoiding the problems
with Request-Reply polling of measurement data,
which include using the wrong polling interval, which
will either cause a loss of measurements or waste
bandwidth by getting the same measurements more
than once. Even when using the correct polling
interval, a few messages will be lost, because of the
communication request not being executed with the
exact same interval as the hardware polling.
The average latency shown in figures 10-15 show
how long it takes for a control command to get to a
DER on average, but it is only a small part of the
latency of sending a control command over the
Internet, as opposed to the comparison, which uses
Ethernet. Still the results show that asynchronous
Push-Pull improves the latency by 3-4 times, which
can clearly be seen in figure 11, where the limit of the
bandwidth is not reached and the messages are big
enough for the results to be clear.
The results also show that interchangeable
serialization, like with throughput, also improves the
latency by about 2 times for messages of half the size,
which is seen in figure 14, by comparing the 10 kB
messages to the 20 kB messages. Which means that if
the message size is reduced by 5 times, then the
latency is improved by 5 times, in addition to the
gains from the middleware having faster latency for
binary messages.
The data loss of the compared middleware is
minimal and should not affect most use cases, but in
those few affected cases, middleware with data loss,
should off course be avoided, which includes XML-
RPC, CORBA, and Web Services, as shown in figure
16. This is however only for Push-Pull when a stable
high-bandwidth data connection is used.
The memory consumption is important for use
cases using SoC devices and for scaling up to very
high throughput use cases. It should be noted that the
measured memory consumption for OPC UA and
XMPP are for 100 iterations, which means that if they
could be run with 1000 iterations they would use a lot
of memory. However, even excluding this difference,
the memory consumption differs by at least a factor
of 10, as shown in figure 17.
4.3 Guidance
When choosing whether to use middleware advocated
for by the prevalent communication standards (Web
Services and XMPP), it should be considered that
they have terrible performance, to begin with.
Especially when considering that Web Services does
not support Publish-Subscribe and XMPP does not
support interchangeable serialization, which is
extremely problematic with low bandwidth data
connections and high throughput use cases.
The fact that these standards are moving from
Web Services to XMPP, makes the choice even easier
with SoC devices because XMPP can only be used for
use cases with low traffic where the rest of the control
system uses very little memory, and then still risks
failure due to running out of memory.
YAMI4 and ZeroMQ have a strong performance
and advantages in characteristics, primarily Publish-
Subscribe that makes them strong candidates to use
for Smart Grid control system.
ZeroMQ has better performance than YAMI4 and
can be used for commercial products, while YAMI4
has lower memory consumption and QoS
prioritization, which makes YAMI4 better suited for
Smart Grid Communication Middleware Comparison - Distributed Control Comparison for the Internet of Things
225

distributed control on SoC devices with low
bandwidth data connections, and ZeroMQ better
suited for centralized or hierarchical control on strong
hardware with high bandwidth data connections.
WAMP should also be considered because it uses
Web Sockets, which is an emerging web standard,
which is being broadly used, and even though it has
lower performance, does not support prioritization
and interchangeable serialization, it does support
MessagePack which is a quite efficient serialization
format and might support either more serialization
formats or interchangeable serialization in the future.
When it is matured and for use cases not requiring
prioritization, it could possibly be one of the best
choices.
5 CONCLUSIONS
The paper shows that using message based
middleware in the form of YAMI4 or ZeroMQ has
excellent performance, and provide the best
characteristics, while other papers (Albano et al.
2015) just state that message based middleware is the
obvious choice for Smart Grid communication
because of it being message based by nature.
The paper shows the results of comparing a large
carefully chosen range of middleware, including
modern middleware, considering Smart Grid
requirements, the impact of serialization and SoC
devices, for distributed control with
recommendations for the choice of middleware.
Future work could be done by combining
serialization and communication middleware to show
the impact of combinations of the two, and to run
performance tests on high and low bandwidth data
connections, using constrained and more capable
hardware.
REFERENCES
Petersen, B., Bindner, H., Poulsen, B., You, S. (2017).
Smart Grid Serialization Comparison. In SAI
Computing Conference (unpublished), London, 2017.
Mackiewicz, R. E. (2006). Overview of IEC 61850 and
Benefits. In IEEE PES Power Systems Conference and
Exposition, Atlanta, 2006. pp. 623-630.
McParland, C. (2011), OpenADR open source toolkit:
Developing open source software for the Smart Grid. In
IEEE Power and Energy Society General Meeting, San
Diego, 2011. pp. 1-7.
Uslar, M., Rohjans, S., Specht, M., Vázquez, J. M. G.
(2010). What is the CIM lacking?. IN IEEE PES
Innovative Smart Grid Technologies Conference
Europe (ISGT Europe), Gothenburg, 2010. pp. 1-8.
Albano, M., Ferreira, L. L., Pinho, L. M., Alkhawaja, A. R.
(2015). Message-oriented middleware for smart grids.
In Computer Standards & Interfaces. 2015, 38: 133-
143.
Qilin, L., Mintian, L. (2010). The state of the art in
middleware. In Information Technology and
Applications (IFITA). 2010.
Dworak, A., Sobczak, M., Ehm, F., Sliwinski, W., Charrue,
P. (2011). Middleware trends and market leaders 2011.
In Conf. Proc.. Vol. 111010. No. CERN-ATS-2011-196.
2011., 2011.
W3C, 2016, Web Services [Online]. Available:
http://www.w3.org/2002/ws/. [Accessed 25 11 2016].
XSF, 2016, XMPP [Online]. Available: https://xmpp.org/.
[Accessed 25 11 2016].
Eclipse, 2016, Jetty [Online]. Available:
http://www.eclipse.org/jetty/. [Accessed 24 11 2016].
Apache Mina, 2016, Vysper [Online]. Available:
https://mina.apache.org/vysper-project/. [Accessed 24
11 2016].
Realtime Ignite, 2016, Smack [Online]. Available:
https://www.igniterealtime.org/projects/smack/.
[Accessed 24 11 2016].
Lehnhoff, S., Mahnke, W., Rohjans, S., Uslar, M. (2011).
IEC 61850 based OPC UA Communication-The Future
of Smart Grid Automation. In 17th Power Systems
Computation Conference (PSCC 2011). 2011.
Stockholm.
Srinivasan, S., Kumar, R., Vain, J. (2013). Integration of
IEC 61850 and OPC UA for Smart Grid automation. In
2013 IEEE Innovative Smart Grid Technologies-Asia
(ISGT Asia). 2013.
Prosys, 2016, OPC UA [Online]. Available:
https://www.prosysopc.com/products/opc-ua-java-
sdk/. [Accessed 25 11 2016].
Oracle, 2016, RMI [Online]. Available:
http://www.oracle.com/technetwork/java/javase/tech/i
ndex-jsp-136424.html. [Accessed 25 11 2016].
Apache, 2016, XML-RPC [Online]. Available:
https://ws.apache.org/xmlrpc/. [Accessed 25 11 2016].
OMG, 2016, CORBA [Online]. Available:
http://www.corba.org/. [Accessed 25 11 2016].
ZeroC, 2016, ICE [Online]. Available: https://zeroc.com/.
[Accessed 25 11 2016].
iMatix, 2016, ZeroMQ [Online]. Available:
http://zeromq.org/. [Accessed 25 11 2016].
JeroMQ, 2016, JeroMQ [Online]. Available:
https://github.com/zeromq/jeromq. [Accessed 25 11
2016].
Tavendo, 2016, WAMP [Online]. Available: http://wamp-
proto.org/. [Accessed 25 11 2016].
Matthias247, 2016, Jawampa [Online]. Available:
https://github.com/Matthias247/jawampa. [Accessed
25 11 2016].
Inspirel, 2016, YAMI4 [Online]. Available:
http://www.inspirel.com/yami4/. [Accessed 25 11
2016].
SMARTGREENS 2017 - 6th International Conference on Smart Cities and Green ICT Systems
226
