
Context-awareness Meta-model for Reconfigurable Control Systems
Soumoud Fkaier
1, 2, 3
, Mohamed Romdhani
2
, Mohamed Khalgui
1, 2
and Georg Frey
3
1
Polytechnic School of Tunisia, Carthage University, Tunisia
2
LISI Lab. of INSAT, Carthage University, Tunisia
3
Automation and Energy Systems, Saarland University, Germany
Keywords:
Meta-model, Reconfiguration, Real-time System, Software Architecture, Adaptive System, Functional
Constraint.
Abstract:
With the increasing evolution of adaptive control systems, control applications are asked to satisfy more con-
straints. On one hand, these applications have to guarantee flexible adaptation processes. On the other hand,
they must offer an efficient interaction with the environment. Satisfying such needs is still challenging due to
real-time requirements. Developing an application covering these constraints needs a robust software support.
Some properties like clear structuring, flexibility and reuse are becoming necessary to ease the development
of the appropriate applications. In this paper, we propose a context-aware meta-model enabling the devel-
opment of real-time reconfigurable control systems. This meta-model offers a development flexibility while
meeting the functional as well as the real-time constraints. To prove the efficiency of this meta-model, we
implemented a framework on the basis of the new concepts. Also, we simulated a case study using the new
tool. As a performance test, we calculated the system response time and we compared it with other work.
1 INTRODUCTION
Adaptive control systems are systems that provide
the possibility to adapt their behavior to the eventual
changes (Lepuschitz et al., 2011). The main feature
that distinguishes them is leading self-reconfiguration
(Valentini et al., 2013). Reconfiguration scenarios are
dedicated to allow adding, removing and/or updating
some system tasks at the aim to keep its effective-
ness (Idriss et al., 2015). Reconfigurations can have
various origins: They can be caused by changes in
the control targets, the state of the system and even
the environment that the system behaves within (Ca-
linescu et al., 2011). In this paper we focus on devel-
oping reconfigurations coming from the environment.
We consider that this issue can be treated based on
context-awareness paradigm. This concept has dealt
at first with the field of mobile computing. It was in-
troduced by (Schilit and Theimer, 1994) as a solution
for mobile applications to enable the adaptation to the
location, nearby users/objects, and modifications of
those objects at run-time. After that, the notion has
been boosted and it was developed in a wide range of
fields: Internet of Things (Sukode et al., 2015), health
care systems (Lo et al., 2011), transportation systems
(Al-Sultan et al., 2013), and many other fields (Zhang
et al., 2013) (Zhan et al., 2014)(Schuller et al., 2013).
One important promising field of study is improving
the control systems by providing them with the ap-
titude to adjust their execution according to the dy-
namic changes of the environment.
To be useful, a reconfigurable system has to meet
some constraints. One common challenge of the most
of the adaptive systems is respecting real-time re-
strictions. These systems are considered meaning-
ful unless they do not exceed the deadlines of their
tasks. Hence, satisfying real-time constraints is pri-
marily needed. Furthermore, ensuring a certain level
of awareness about what happens in the environment
is of great importance. So, these systems are asked
to be flexible enough in order to lead fluent reconfig-
urations. Also, they are inquired to pick-up as max-
imum as possible the occurred events in their prox-
imity. Moreover, treating reconfigurations at runtime
is not a trivial task since there are some events that
can be contradictious or that may need some shared
resources. The system services must be executed re-
specting the dependencies relations. As can be seen,
there are various constraints to be fulfilled. Develop-
ing such systems will be really a hard or even a com-
plex task. In that case, to avoid design complexity a
high-level of abstraction becomes a necessity.
226
Fkaier, S., Romdhani, M., Khalgui, M. and Frey, G.
Context-awareness Meta-model for Reconfigurable Control Systems.
DOI: 10.5220/0006328502260234
In Proceedings of the 12th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2017), pages 226-234
ISBN: 978-989-758-250-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Our contribution in this paper, is to offer a new
modeling concept of real-time context-aware recon-
figurable systems. We propose a context-aware meta-
model allowing the specification of such system in an
easy way. The proposed meta-model aim to guarantee
the interaction with the environment and the aware-
ness about the context of the use. It offers the respect
of real-time as well as the functional constraints of
the system. Also, it offers a flexibility of the recon-
figuration processes. In addition, we implemented a
framework using C# programming language. We sim-
ulated a formal case study with the developed tool.
We calculated the system response time to prove the
efficiency of the new meta-model and we compared
the results to another work.
The remainder of this paper is given as follows:
Section 2 presents briefly the background of our
proposition. Section 3 contains the definition and
modeling of the new meta-model. Section 4 presents
the application to the case study. Finally, Section 5
concludes this paper and highlights the perspectives.
2 BACKGROUND
Numerous works have provided specifications facil-
itating the development of adaptive control systems
(Siddiqi and de Weck, 2008). In the following, we
briefly show some works on modeling of real-time
reconfigurable systems. (Capilla et al., 2011) have
proposed an UML meta-model to be able to capture
decisions. They focused on some important issues
such as maintenance, evolution and run-time deci-
sions. (Feiler et al., 2006) proposed the Architecture
Analysis and Design Language (AADL) which is an
architecture description language allowing the spec-
ification of both software and hardware of a system.
It offers specifying reconfigurable systems using state
machines in which the state represents a configuration
and a transition represents an event. (Gumzej et al.,
2006) have dealt with PEARL specification which is
a hardware/software co-design methodology. They
offered a guide for system reconfigurations. (Nafti
et al., 2015) have presented a meta-model for re-
configurable embedded systems called Chameleon.
Chameleon is an object oriented meta-model allow-
ing reconfiguration flexibility and reduces the con-
sumption of both the processor time and the mem-
ory. (Krichen et al., 2011) and (Hamid and Krichen,
2010) have proposed a meta-model aiming at speci-
fying the distributed reconfigurable real-time embed-
ded systems. Also, they implemented an UML profile
called RCA4RTES as an application of their meta-
model. (Dowling and Cahill, 2001) have proposed an
architecture meta-model enabling the creation of dy-
namic software architectures. They provided an adap-
tation contract description language aiming at sep-
arating the adaptive behavior of systems from their
functional behavior. (Lehmann et al., 2010) have pre-
sented a meta-modeling process for modeling self-
adaptive applications in order to facilitate the dynamic
adaptation at run-time.
All the previous researches have proposed several
modeling and specification methods to describe re-
configurable systems. However managing the con-
text information is practically not studied. Providing
the models of context collection, classification, pro-
cessing and dissemination is useful to minimize the
complexity of the reconfiguration processes. More-
over, some of the existing models do not highlight
well how real-time constraints can be treated. Adding
to that, organizing the relation between the different
reconfigurations and resolving conflicting scenarios
are not mentioned as well. The functional constraints
like the inclusion or exclusion rules, the dependencies
relations, the sharing resources issues are not satis-
fied with a clear and easy way. On these basis, we
propose a new meta-model overcoming all these con-
straints. We design a three levels meta-model where
each level concerns a particular directive. The first
level tackles the relation of the system with its envi-
ronment. The second level is dedicated to manage the
system behavior by respecting all the possible con-
straints. The third level contains the set of the system
services. The next section presents a description of
the proposed meta-model.
3 NEW CONTEXT-AWARENESS
META-MODEL
In this section, we present the proposed concept by
showing a detailed description of the different com-
ponents of the meta-model.
3.1 Concept Description
Adaptive control systems have many common charac-
teristics. There are some execution steps repeated in
most of them regardless their field of application and
their specificity of operation. For instance, the major-
ity of them have an agent or an entity responsible for
the digital control. This agent includes the controllers
and algorithms, the logic entities, etc. Also, they con-
tain another agent responsible for the mechanical part
(management of the sensors and actuators). And fi-
nally, most of them include an entity responsible for
the interaction with the users (handling the I/O and
Context-awareness Meta-model for Reconfigurable Control Systems
227
the graphical display). In order to provide an easy
modeling of these entities and to express the relations
between them, a high level of abstraction is really
needed. In this context, we propose a new reconfig-
urable context-aware real-time meta-model. We de-
fine this meta-model through giving three viewpoints:
(i) Structural approach, (ii) Behavioral approach, (iii)
Constraints perspective approach.
3.1.1 Structural Approach
The study of the adaptive systems allows us to deduct
that they can be designed through three levels archi-
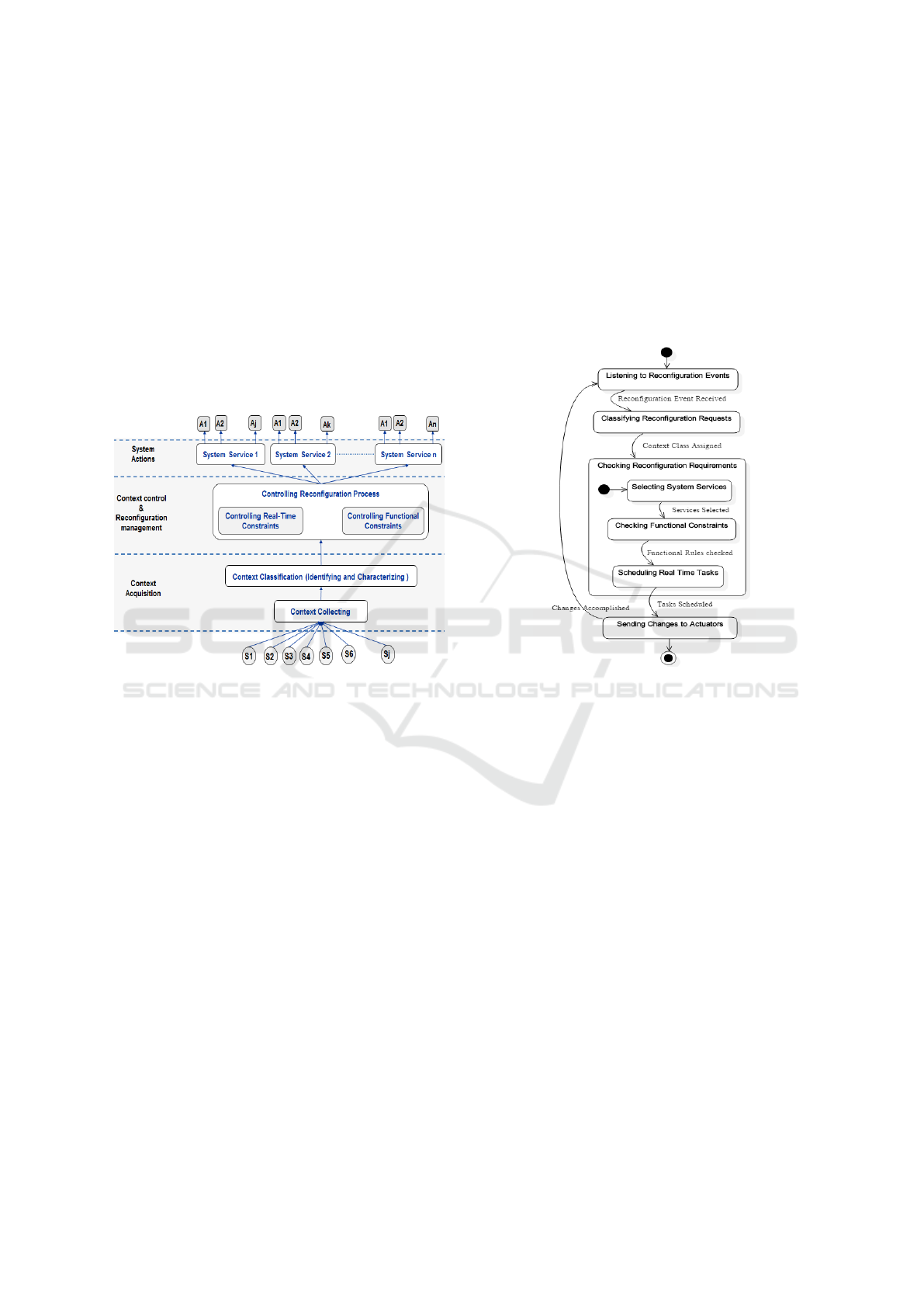
tecture (see Fig. 1).
Figure 1: A generic structure of the context-aware real-time
systems.
The first level can be called Context Acquisition.
It has to manage the communication with the events
triggered in the environment by means of sensors.The
context acquisition has to be achieved in two steps: (i)
Context collecting, (ii) Context classification (it can
be reached by identifying the type of the event and by
attributing to it a set of properties). The second level
can be called Context Control and Reconfiguration
Management. This level should contain the control
logic as well as the constraints verification modules
which are basically the real-time and functional re-
strictions. The third level can be called System Ac-
tions and it has to include the system services. Hav-
ing a separation between the system services and the
control aspects helps developers to benefit from the
re-usability and the flexibility.
3.1.2 Behavioral Approach
The analysis of the behavior of adaptive control sys-
tems enables us to note many observations about their
control attitudes. Most of these systems need to per-
form an adaptation to the context they are putted in.
The adaptation logic has many shared steps, therefore
we propose a generic process expressed via the FSM
(Finite State Machine) of Fig. 2. Most of the self-
adaptive control systems have to detect to the even-
tual changes. Then, classifying the reconfiguration
requests and identifying them is a necessary step that
helps to decide which control process to lead. After
that, checking the constraints that can be faced has to
be performed. Finally, sending the update commands
to the appropriate actuators is needed.
Figure 2: The FSM expressing a generic context adaptation.
3.1.3 Constraints Perspective Approach
A survey of the mostly faced constraints in adaptive
systems drives us to assume that they have a set of
shared constraints. Basically, all these systems have
to perform their tasks under real-time constraints.
Functional constraints also are always required. Thus,
we propose to use generic OCL rules (the Object Con-
straint Language which is a formal language for the
definition of constraints on UML models) with the
aim of abstracting the commonly faced constraints.
3.2 Meta-Model Definition
The meta-model is composed of three main packages
(see Fig. 3). RealTime ContextAware MetaModel is
the container package that contains: (i) Context Ac-
quisition, (ii) Context Control and Reconfiguration
Management, and (iii) System Actions. These three
packages are linked through dependencies relations
(in particular import that allows to get the services
from another package and use which allows to utilize
the content of a package).
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
228
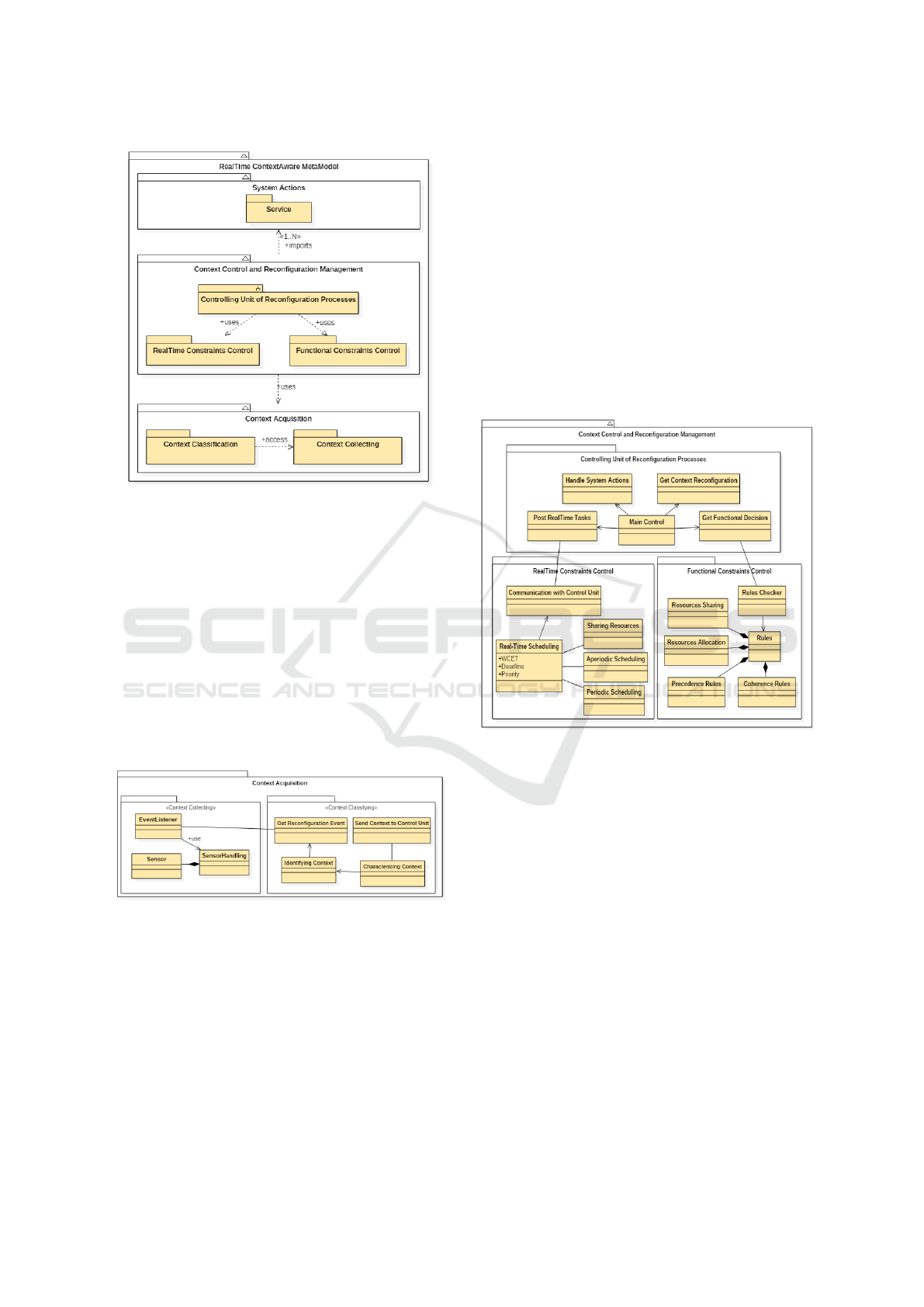
Figure 3: Model diagram of the proposed meta-model.
3.2.1 Context Acquisition
This package is composed of two packages: Context
Collecting and Context Classification (see Fig. 4).
Context Collecting contains the meta-class Event Lis-
tening which is responsible for picking-up the trig-
gered events from the surrounding environment. For
this, it uses the meta-class Sensors Handling which
manages the different kind of the used sensors. Sen-
sors Handling is composed of the meta-class Sensor
that offers an abstraction of sensors (it has a set of
attributes like the name of the sensor, the detected
value...).
Figure 4: Context Acquisition Level.
Context Collecting package is accessed by the
package Context Classification through to the meta-
class Get Reconfiguration Event. Then, the reconfig-
uration events are imported by the meta-class Iden-
tifying Context in order to recognize their type. The
meta-class Characterizing Context will use the iden-
tified events and then it performs an abstraction. Fi-
nally, it will send them to the control unit through the
meta-class Communicate Context to Control Unit.
3.2.2 Context Control and Reconfiguration
Management
This package uses the Context Acquisition in order to
get the reconfiguration requests. It also imports the
services to be offered by the system from the pack-
age System Actions. It is composed of three packages
linked through dependencies relationships. The main
package is called Controlling Unit of Reconfiguration
Processes (see Fig. 5). This package uses two other
packages which contain the system constraints. The
specification of constraints is performed on the basis
of OCL. We distinguish between two types of con-
straints: functional and real-time.
Figure 5: Context Control and Reconfiguration Manage-
ment Level.
Controlling Unit of Reconfiguration Processes
contains five meta-classes. The meta-class Main Con-
trol includes the main control algorithm. It imports
the reconfiguration requests through the meta-class
Get Context Reconfiguration. To accomplish its task,
it uses the meta-class Get Functional Decision that
will interact with the package Functional Constraints
Control in order to pick-up the services to be executed
after having been checked by this package. Services
selection will be performed through the meta-class
Handle System Actions. The chosen services will be
sent to the meta-class Post Real-Time Tasks which is
responsible for the interaction with the package Real-
Time Constraints control.
The package Real-Time Constraints Control is re-
sponsible for scheduling the real-time tasks of the sys-
tems. It contains a meta-class called Communication
with Control Unit responsible for the interaction with
the package Controlling Unit of Reconfiguration Pro-
Context-awareness Meta-model for Reconfigurable Control Systems
229
cesses. It contains also a meta-class called Real-Time
Scheduling including the main scheduling algorithm
which is responsible for keeping the feasibility of the
system. This is a generic meta-class that can be in-
stantiated to specify the type of scheduling. These
instances are called as follows: Periodic Scheduling,
Aperiodic Scheduling and Sharing Resources.
Functional Constraints Control is the third pack-
age. It contains a meta-class called Rules Checker.
This meta-class is responsible for checking the func-
tional rules of the smooth execution of the system
services. It uses a meta-class called Rules which is
composed of four other meta-classes specifying the
type of rules to be checked. These meta-classes are:
(i) Resources Allocation responsible for reserving the
needed resources for the system execution. (ii) Prece-
dence Rules responsible for organizing the tasks ac-
cording the precedence logic. (iii) Resources Sharing
responsible for indicating all the shared resources to
be used in the system. (iv) Coherence Rules indicat-
ing the system tasks that have to work simultaneously
and the tasks that have not to work together.
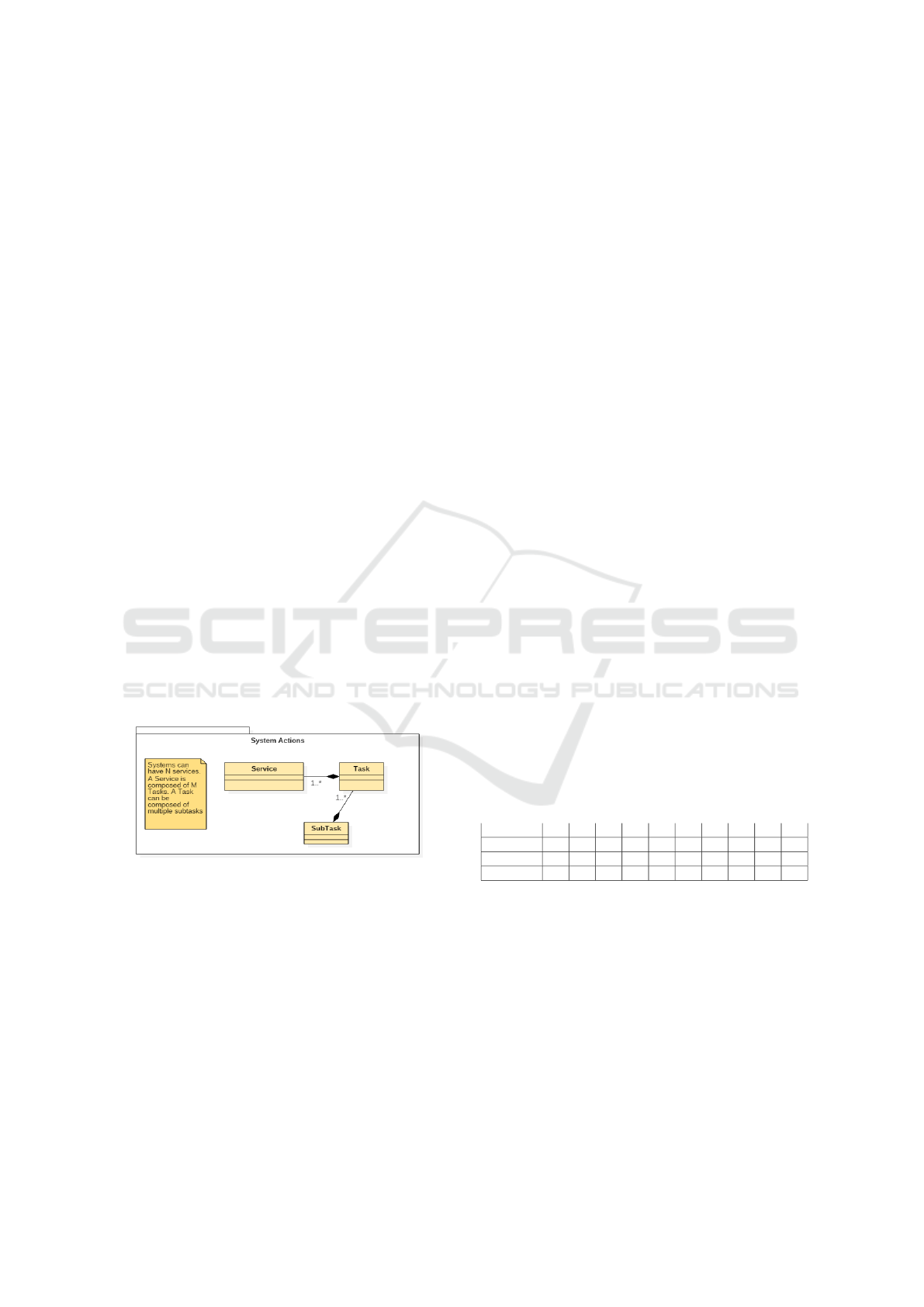
3.2.3 Systems Actions
This package is dedicated to be the container of the
systems services. It can contain N service pack-
ages. Every service meta-class can contain also M
task meta-classes. These meta-classes can be linked
through many types of relationship such as import,
use, access, etc. In Fig. 6 shows the abstraction of the
system service meta-classes.
Figure 6: The Package System Actions.
4 CASE STUDY
In order to evaluate the suitability of the proposed
meta-model, we present the modeling of a case study.
4.1 Case Study Presentation
The formal adaptive control system must adapt its be-
havior according to the dynamic changes of the en-
vironment (Landau et al., 1998). It is running under
real-time as well as functional constraints. It has a
set of services that contains the tasks to be performed.
Let us assume that this system uses a set of different
sensors (temperature, humidity, accelerometer, etc.).
Let the ten services called as follows: S
i
, i=1..10.
These services are distinct units containing the main
tasks of the different execution modes. A service is
executed after having been elected by the control unit.
This control unit organizes the services according to
the needs of the user: It can be executed in a periodic
way (fixed by the developers) or in aperiodic way (re-
configuration triggered by the events). Some of the
services are urgent and need to be treated before ex-
ceeding their deadlines.
Services are linked between each other through
various relationship types. Some of them are linked
by precedence relationship, which means that a ser-
vice S
i
cannot begin the execution before the end of
the service S
j
. The precedence order for this case
study is given by {(S1,6), (S2, 9), (S3, 5), (S4, 10),
(S5, 1), (S6, 7), (S7, 2), (S8, 3), (S9, 8), (S10, 4)} (i.e
S5 has to be executed at first, then S7, then S8, etc.)
Other services have a resources constraint, which
means that they need some shared resources in their
execution. The shared resources of this case study are
{ X, Y, Z, R, Q,} and they are used as follows: {(S1,
X), (S2, R-Z), (S4, Y-Q), (S5, Y,R), (S7, X), (S10, R-
Z)}. Not only that, but also there are services having
a coherence relationship. It determines whether the
services can be executed together or not. In this sys-
tem, we assume that (S2 and S3), (S4 and S7) and (S8
and S5) are not coherent and the execution of the one
implies the blocking of the other. Finally, to be ex-
ecuted correctly, the system services need to allocate
some resources like the memory, energy, and proces-
sor time. Let us consider the resources amounts indi-
cated in the resources table. (see Table 1).
Table 1: Resources table.
Service 1 2 3 4 5 6 7 8 9 10
Memory 10 8 15 20 5 12 10 8 15 30
Energy 20 16 30 40 10 24 20 16 30 60
Processor 8 6 13 18 3 10 8 6 13 28
4.2 Case Study Modeling
The proposed formal adaptive system uses the con-
cepts proposed in the meta-model. A triggered event
in the environment is picked-up by the acquisition
level (see Fig. 7).
At this level, it is identified by attributing a type
and characterized by attributing a set of properties like
the Worst Case Execution Time (WCET), the prior-
ity, and the deadline. After being abstracted and pre-
sented by the first level, the reconfiguration request is
sent to the Context Control and Reconfiguration Man-
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
230
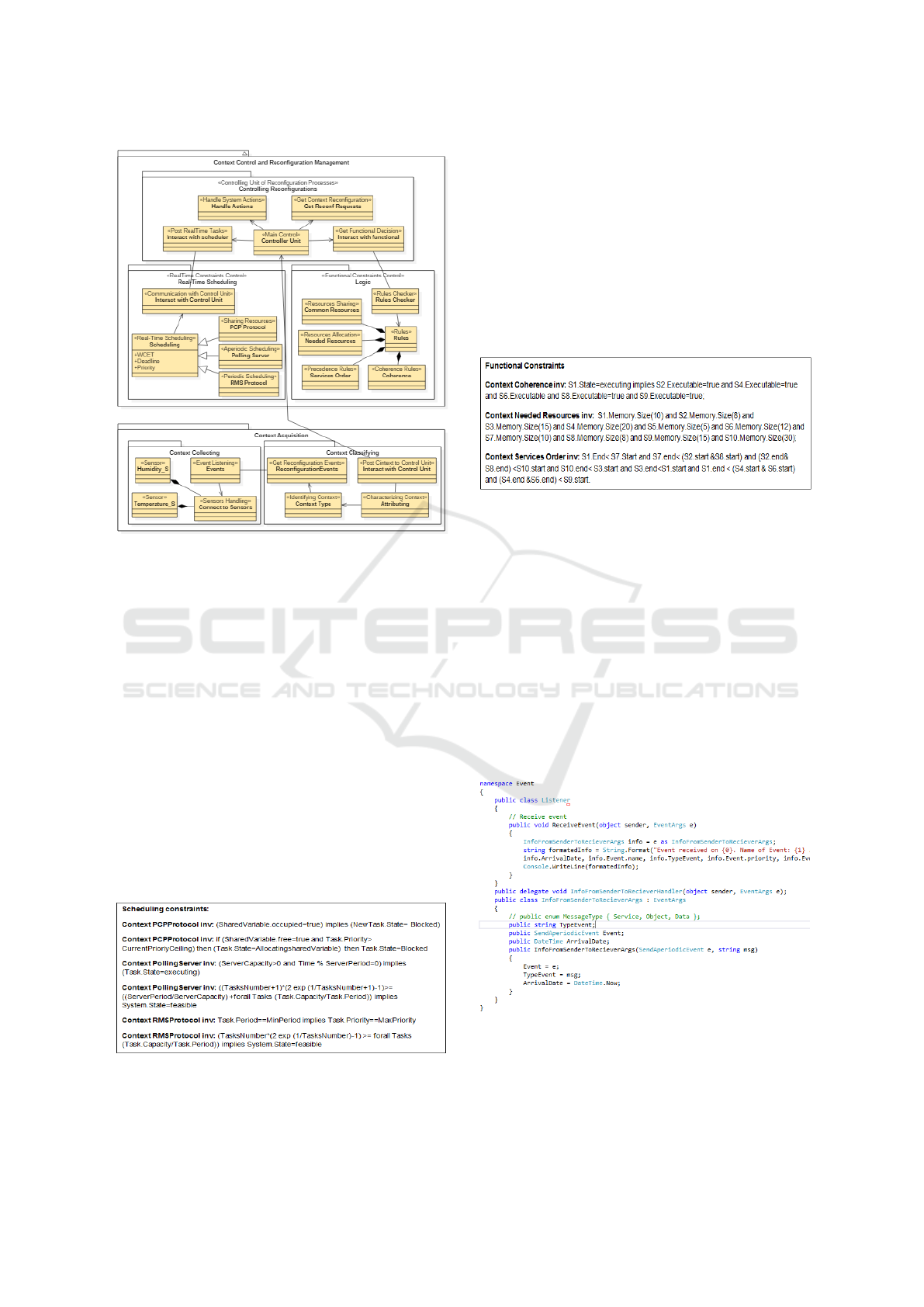
Figure 7: The model of the case study.
agement level in order to be verified. The control unit
will guarantee the global control of the reconfigura-
tion process. In fact, the package Controlling Recon-
figurations will collaborate with the packages of the
verification of the system constraints. It will interact
with both Real-Time Scheduling and Logic packages.
The Rate Monotonic (Lehoczky et al., 1989) is im-
plemented to handle periodic tasks, the Polling Server
(Davis et al., 1993) for the aperiodic tasks and the
Priority Ceiling Protocol (Sha et al., 1990) for the
scheduling under sharing resources. The system fea-
sibility is guaranteed when services do not exceed
their deadline. Also when the rate of utilization of the
processor is not at its maximum level. For this rea-
sons, we have developed a set of real-time constraints
by means of OCL (see Fig. 8). These queries have
to be always satisfied in order to keep system correct-
ness.
Figure 8: The feasibility OCL queries.
In the same manner, the package Logic is designed
to hold the functional constraints of the system. The
class Rules is composed of four other classes. Needed
Resources will manage the used resources during the
execution of the control application. It leads all al-
location and de-allocation processes. Common re-
sources manage the shared resources that can be used
by the system. Services Order is responsible for con-
trolling precedence constraints. Coherence mention
the services that are able to be treated together. The
OCL rules are implemented by the classes of the func-
tional constraints package in order to avoid confusion
(see Fig. 9).
Figure 9: The functional OCL rules.
4.3 Case Study Simulation
In this subsection, we present the simulation scenario
of the modeled adaptive system.
4.3.1 Implementation
We have developed a framework following the new
meta-model. This framework is holding the modules
existing in the three levels described by the meta-
model. We used C# programming language in the
implementation phase. Fig. 10 shows the class re-
sponsible for detecting events from the environment.
Figure 10: Listener class of the context collecting package.
4.3.2 Simulation
We consider the formal adaptive system presented in
the previous subsection. The services priorities are
Context-awareness Meta-model for Reconfigurable Control Systems
231
given as follows: {(S1, 5), (S2, 6), (S3, 3), (S4, 7),
(S5, 4), (S6, 5), (S7, 6), (S8, 6), (S9, 3), (S10, 1)
} . S10 has the highest priority, S4 the next highest
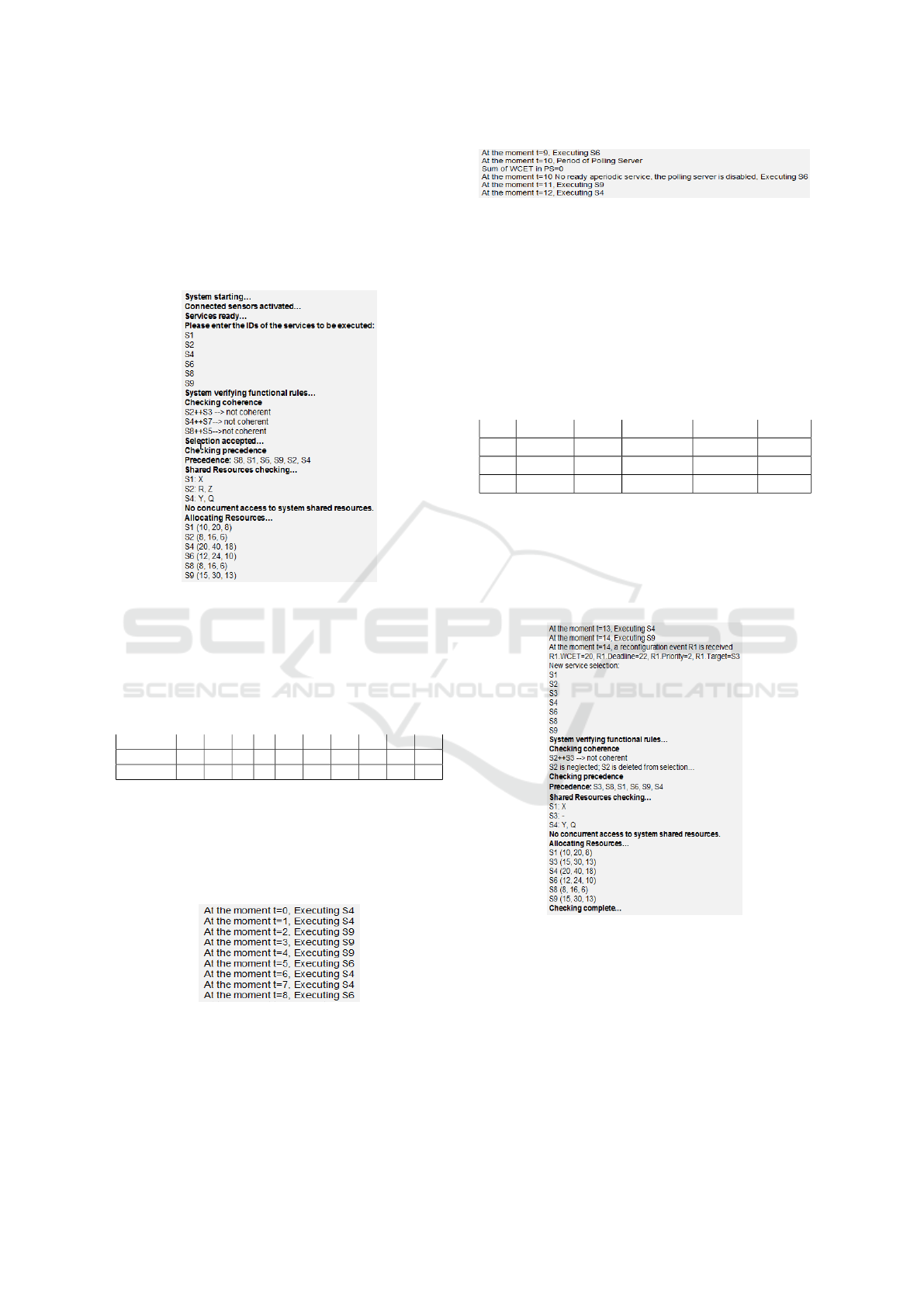
priority, and so on. The first step performed by the
control unit is loading the services and checking the
functional constraints. Then, it starts the resources
allocation for each service (see Fig. 11)
Figure 11: The execution trace of the functional checking.
After that, the control unit interacts with the
scheduling package and set-up the scheduling table
in the real-time constraints module. Table 2 indicates
the capacity of each service as well as its period of
activation.
Table 2: Services capacities and periods.
Service 1 2 3 4 5 6 7 8 9 10
Capacity 5 6 3 2 7 4 5 6 3 1
Period 22 28 8 6 45 16 22 35 11 4
The Rate Monotonic scheduling protocol is se-
lected as the protocol to be used to handle periodic
services. The execution of the services is given in the
next Fig. 12. In each timer tick, the processor treats a
unit of a service.
Figure 12: The execution of the services according RMS
protocol.
The polling server has these properties: capac-
ity=4 and period=10. So, every 10 time units the
polling server will be activated in order to check the
list of aperiodic services (Fig. 13).
Figure 13: The activation of the Polling Server.
A reconfiguration scenario take place when a re-
configuration request is received by the control unit.
A reconfiguration request can be a change in the en-
vironment, human intervention, components added or
deleted from the system, etc. These reconfigurations
are unpredictable and they are event driven.
We suppose that three reconfiguration requests are
picked-up during the execution and that they have the
following properties (see Table 3).
Table 3: Reconfiguration table.
id arrival wcet deadline priority target
R1 t=14 20 22 2 S3
R2 t=25 30 32 1 S10
R3 t=40 35 36 3 S7
Every reconfiguration request is labeled by a
deadline, WCET, and priority and it aims at loading
a specific service. When they come in the system,
the control unit checks the priority of the current ex-
ecuting service and decides whether to interrupt the
execution or to re-schedule the ready tasks.
Figure 14: Checking the functional constraints of the recon-
figuration request.
At t=14, a reconfiguration event is coming to load
the service S3. This change is urgent and has a high
priority (priority=2). At this moment, the control unit
will check all the functional constraints and prepare
the new configuration to be applied on the next ac-
tivation of the Polling Server. The services order is
necessarily updated, the service loaded by the recon-
figuration request will take place in the schedule. Fig.
14 shows the execution trace of these updates. The
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
232
execution of the reconfiguration service starts at the
activation period of the Polling Server (the moment
t=20) as shown in Fig. 15.
Figure 15: The execution of the loaded service.
The simulation is performed in this way: ev-
ery received request will induce a checking of the
functional constraints then the aimed service will be
scheduled according to the real-time protocols.
4.4 Comparison with other work
Comparing our proposed meta-model with other ex-
isting works will help us to highlight the originality as
well as the efficiency of our contribution. That is why
we compared our meta-model with the Chameleon
(Nafti et al., 2015). We chose to compare it with
Chameleon meta-model since it includes some sim-
ilarities. In fact, both meta-models intend to model
the reconfiguration of control systems. Reconfigu-
rations are performed with the aim of satisfying the
adaptation of the system to its environment as well as
satisfying an optimal operation of the system.
In Chameleon, the classes composing the system
may change their behavior automatically. They con-
tain all the common methods for all the possible con-
figurations and a set of specific methods for each con-
figuration. Therefore, if developers choose to imple-
ment the control applications of an adaptive control
system with Chameleon, they have to develop their
system services through the Chameleon classes. And
according to the definition of the Chameleon classes,
some components have to be created in all of them
such as: the method table, the scheduling table, the
data table, the constant table, etc.
Our meta-model shows a higher level of consis-
tency and robustness in fulfilling these goals. In fact,
it presents a separation between the system services
and the control processes. As seen before, all the con-
trol aspects are encapsulated into the Context Con-
trol and Reconfiguration Management level while the
system services are encapsulated in the System Ac-
tions level. This distinction and separation of con-
cepts helps to benefit from re-usability and make the
development process more flexible. The most impor-
tant thing is that our architecture allows a better re-
source consumption since no redundancy or extra pro-
cessing is done.
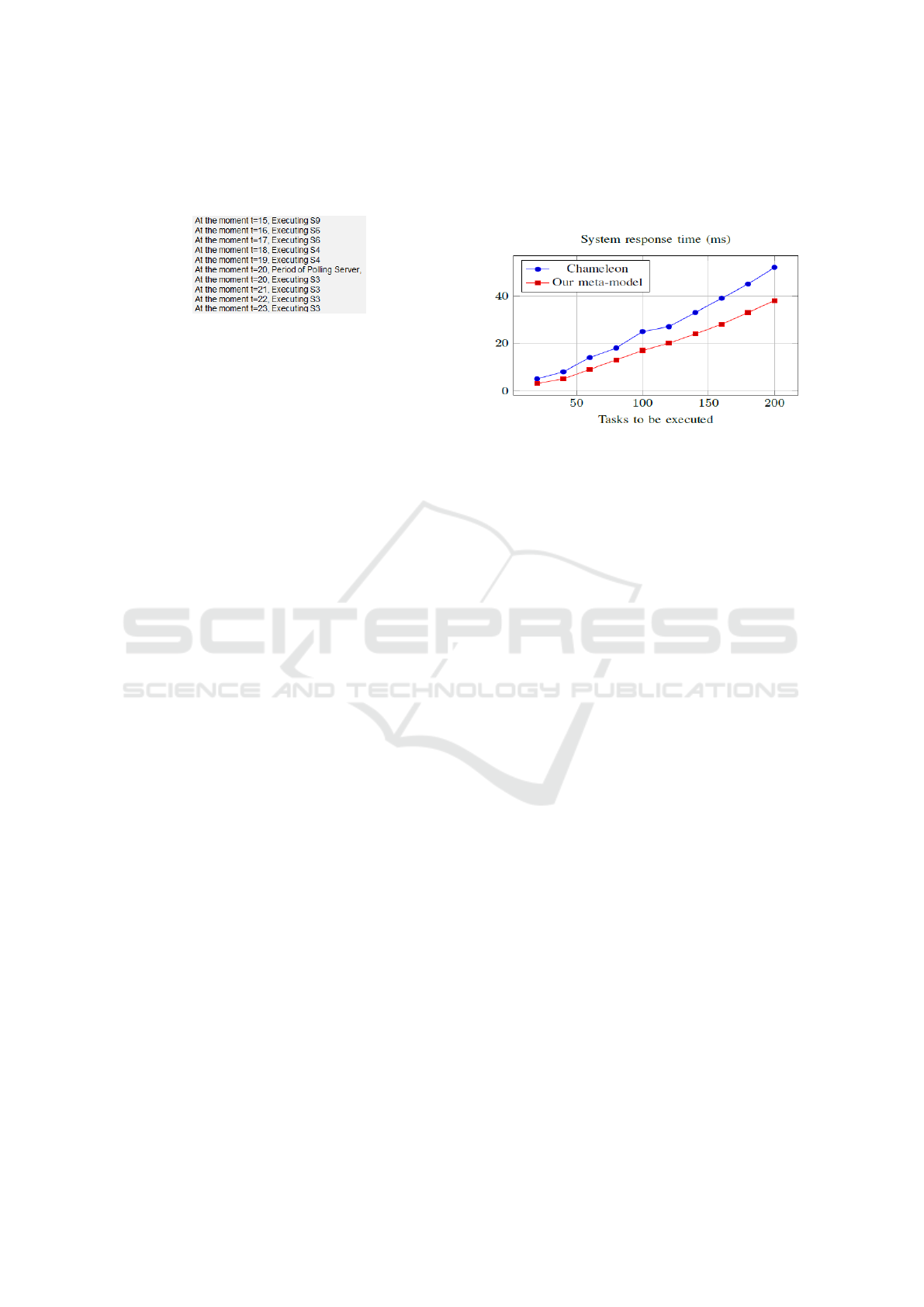
As a proof, we present an approximate calcula-
tion of the response time of the system when using
our meta-model compared to using Chameleon meta-
model (see Fig. 16).
Figure 16: The system response time.
According to Figure 16, with the increasing num-
ber of the system services the system response time
taken by Chameleon is higher than the response time
taken by our meta-model. This can be explained by
the definition of several tables in each Chameleon
class. Surely these tables require much processing
time comparing to our meta-model. Thus, our meta-
model prove its robustness.
5 CONCLUSION
This paper proposed a new context-awareness meta-
model for developing real-time reconfigurable adap-
tive control systems. This new meta-model offers the
satisfaction of real-time as well as functional con-
straints that can be needed in adaptive control sys-
tems. Compared to other meta-models developed for
adaptive control systems, the reconfiguration flexibil-
ity, the awareness about the context of use and the
system response time are optimized. A framework
is implemented using C# programming language and
a formal case study is simulated as a running exam-
ple. To test the performance of the proposed meta-
model, we have performed measurement of the sys-
tem response time and we have compared the results
with Chameleon meta-model. We presented the anal-
ysis of the obtained results. In future works, we aim
to expand the flexibility and robustness of the meta-
model by covering other control aspects such as the
quality of service issues and the compliance to multi-
platforms.
Context-awareness Meta-model for Reconfigurable Control Systems
233

REFERENCES
Al-Sultan, S., Al-Bayatti, A. H., and Zedan, H. (2013).
Context-aware driver behavior detection system in in-
telligent transportation systems. IEEE transactions on
vehicular technology, 62(9):4264–4275.
Calinescu, R., Grunske, L., Kwiatkowska, M., Mirandola,
R., and Tamburrelli, G. (2011). Dynamic qos manage-
ment and optimization in service-based systems. IEEE
Transactions on Software Engineering, 37(3):387–
409.
Capilla, R., Zimmermann, O., Zdun, U., Avgeriou, P.,
and K
¨
uster, J. M. (2011). An enhanced architectural
knowledge metamodel linking architectural design de-
cisions to other artifacts in the software engineering
lifecycle. In European Conference on Software Archi-
tecture, pages 303–318. Springer.
Davis, R. I., Tindell, K. W., and Burns, A. (1993). Schedul-
ing slack time in fixed priority pre-emptive systems. In
Real-Time Systems Symposium, 1993., Proceedings.,
pages 222–231. IEEE.
Dowling, J. and Cahill, V. (2001). The k-component ar-
chitecture meta-model for self-adaptive software. In
International Conference on Metalevel Architectures
and Reflection, pages 81–88. Springer.
Feiler, P. H., Lewis, B. A., and Vestal, S. (2006). The
sae architecture analysis & design language (aadl) a
standard for engineering performance critical systems.
In 2006 IEEE Conference on Computer Aided Con-
trol System Design, 2006 IEEE International Con-
ference on Control Applications, 2006 IEEE Interna-
tional Symposium on Intelligent Control, pages 1206–
1211. IEEE.
Gumzej, R., Colnaric, M., and Halang, W. A. (2006).
Safe and timely scenario switching in uml real-time
projects. In Ninth IEEE International Symposium
on Object and Component-Oriented Real-Time Dis-
tributed Computing (ISORC’06), pages 8–pp. IEEE.
Hamid, B. and Krichen, F. (2010). Model-based engi-
neering for dynamic reconfiguration in drtes. In Pro-
ceedings of the Fourth European Conference on Soft-
ware Architecture: Companion Volume, pages 269–
276. ACM.
Idriss, R., Loukil, A., and Khalgui, M. (2015). New mid-
dleware for secured reconfigurable real-time systems.
In International Conference on Intelligent Software
Methodologies, Tools, and Techniques, pages 469–
483. Springer.
Krichen, F., Hamid, B., Zalila, B., and Jmaiel, M. (2011).
Towards a model-based approach for reconfigurable
dre systems. In European Conference on Software Ar-
chitecture, pages 295–302. Springer.
Landau, I. D., Lozano, R., M’Saad, M., and Karimi, A.
(1998). Adaptive control, volume 51. Springer Berlin.
Lehmann, G., Blumendorf, M., Trollmann, F., and Al-
bayrak, S. (2010). Meta-modeling runtime models. In
International Conference on Model Driven Engineer-
ing Languages and Systems, pages 209–223. Springer.
Lehoczky, J., Sha, L., and Ding, Y. (1989). The rate mono-
tonic scheduling algorithm: Exact characterization
and average case behavior. In Real Time Systems Sym-
posium, 1989., Proceedings., pages 166–171. IEEE.
Lepuschitz, W., Zoitl, A., Vall
´
ee, M., and Merdan, M.
(2011). Toward self-reconfiguration of manufacturing
systems using automation agents. IEEE Transactions
on Systems, Man, and Cybernetics, Part C (Applica-
tions and Reviews), 41(1):52–69.
Lo, C.-C., Chen, C.-H., Cheng, D.-Y., and Kung, H.-Y.
(2011). Ubiquitous healthcare service system with
context-awareness capability: Design and implemen-
tation. Expert Systems with Applications, 38(4):4416–
4436.
Nafti, A., Romdhani, M., and Khalgui, M. (2015).
Chameleon: New object oriented solution for adaptive
control systems. In Pervasive and Embedded Comput-
ing and Communication Systems (PECCS), 2015 In-
ternational Conference on, pages 1–8. SCITEPRESS.
Schilit, B. N. and Theimer, M. M. (1994). Disseminating
active map information to mobile hosts. IEEE net-
work, 8(5):22–32.
Schuller, B., Dunwell, I., Weninger, F., and Paletta,
L. (2013). Pervasive serious gaming for behavior
change–the state of play. IEEE pervasive computing,
3(12):48–55.
Sha, L., Rajkumar, R., and Lehoczky, J. P. (1990). Prior-
ity inheritance protocols: An approach to real-time
synchronization. IEEE Transactions on computers,
39(9):1175–1185.
Siddiqi, A. and de Weck, O. L. (2008). Modeling meth-
ods and conceptual design principles for reconfig-
urable systems. Journal of Mechanical Design,
130(10):101102.
Sukode, S., Gite, S., and Agrawal, H. (2015). Context aware
framework in iot: A survey. International Journal,
4(1).
Valentini, A., Gharbi, A., Khalgui, M., and Gharsellaoui, H.
(2013). Safety reconfiguration of embedded control
systems. Embedded Computing Systems: Applica-
tions, Optimization, and Advanced Design: Applica-
tions, Optimization, and Advanced Design, page 184.
Zhan, K., Faux, S., and Ramos, F. (2014). Multi-scale con-
ditional random fields for first-person activity recog-
nition. In Pervasive Computing and Communications
(PerCom), 2014 IEEE International Conference on,
pages 51–59. IEEE.
Zhang, D., Huang, H., Lai, C.-F., Liang, X., Zou, Q., and
Guo, M. (2013). Survey on context-awareness in
ubiquitous media. Multimedia tools and applications,
67(1):179–211.
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
234
