
Using Evolving Graphs to Evaluate Structural Openness in
Multi-Agent Systems
Sondes Hattab, Faten Ben Hmida and Wided Lejouad Chaari
COSMOS Laboratory, Ecole Nationale des Sciences de l’Informatique, Université de la Manouba, 2010, Manouba, Tunisia
Keywords: Evaluation, Evolving graph, Multi-Agent Systems, Modelling, Measure, Openness, Observation.
Abstract: The evaluation of Multi-Agent Systems (MAS) issue is invoked in the literature in a twofold manner: from
an external point of view through the assessment of design methodologies and development tools and
platforms or from an internal point of view by measuring the functional characteristics of MAS applications.
The latter kind of evaluation is not sufficiently addressed and is mostly oriented towards structural properties.
We believe behavioural characteristics may considerably affect MAS performances and have to be assessed
in order to judge correctly the quality of the MAS. Thus, our aim is to propose an approach to evaluate one
of the most important behavioural characteristics in MAS: openness. We focus especially on structural
openness and we suggest for this purpose a three-step method: observation, modelling and measure. The
modelling technique is based on an evolving graph whose properties are used to estimate metrics for the
evaluation. Then, our approach is tested and validated on a road traffic application.
1 INTRODUCTION
Thanks to their ability to solve a huge number of
complex problems, Multi-Agent Systems (MAS)
have gained increasing interest in the scientific
community. Such success has been accompanied with
several issues have aroused the curiosity of
researchers. We mention particularly the issue
concerning performance evaluation which seems to
become a more complex subject when it is related to
MAS. This is what explains, hence, the limited
number of works in the topic of performance
evaluation. Through these few works, we can
distinguish two categories of proposed approaches.
The first treats the system from an external point of
view like the evaluation of design methodologies and
development tools and platforms. The second focuses
on the evaluation of MAS through the assessment of
their functional characteristics. Unfortunately, such
kind of evaluation is not sufficiently addressed and is
mostly oriented towards structural properties such as
interaction, communication and organization.
Behavioural and interface ones were rarely assessed.
This paper contributes in the enrichment of MAS
evaluation field by focusing on their functional
characteristics. We believe behavioural ones may
considerably affect MAS performances and have to
be estimated in order to well-judge the quality of the
MAS. Thus, our long-term goal is to study and
evaluate behavioural characteristics in MAS. At this
stage, we focus on openness. We propose to put the
spotlight on the structure of open MAS and its
evolution in time, and we will propose an approach to
evaluate structural openness.
The paper is organized as follows: in section 2, a
literature review of multi-agent systems evaluation is
presented, section 3 deals with openness in MAS and
the related existing works. Our proposed evaluation
approach is described in section 4. The application on
which Experimentations were carried out is described
in section 5. We finish by presenting our conclusions
and perspectives in section 6.
2 EVALUATION OF
MULTI-AGENT SYSTEMS
The existing MAS evaluation approaches and our
work position are presented and criticized in Table1.
Hattab, S., Hmida, F. and Chaari, W.
Using Evolving Graphs to Evaluate Structural Openness in Multi-Agent Systems.
DOI: 10.5220/0006334505910598
In Proceedings of the 19th International Conference on Enterprise Information Systems (ICEIS 2017) - Volume 1, pages 591-598
ISBN: 978-989-758-247-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
591
Table 1: MAS evaluation works.
3 OPENNESS IN MULTI-AGENT
SYSTEMS
Openness in MAS has been identified in the literature
regarding two aspects:
Structural aspect: It considers openness as the
ability to deal with inconstant entities that leave
and enter to the system causing a change in its
structure (Valckenaers, 2007). In this case,
openness is called structural openness.
Functional aspect: openness here is based on
the internal evolution of agents and interactions
and considers the modification of their content,
goals, attributes and functionalities (Boissier,
2004). In this case, openness is called
functional openness.
The evaluation of such property is not well
explored in the previous researches. The existing
related works do not evaluate openness as a set of
additions, removals and internal evolution of entities.
Related works Issue Solution
Black-Box-
Based
approaches
They are studied
independently of internal
properties and functionalities:
the evaluation of Agent-
Oriented technology (Tveit,
2001), the evaluation of design
methodologies (Cernuzzi and
Rossi, 2003), the evaluation of
development platforms and
tools (Occello, 2002).
Such evaluation is
done from an external
point of view and does
not address the
running of the
application, its
internal properties or
even the relationship
between its
components and their
evolution in time.
The solution proposed in the literature is to
take into account the internal evolution of
MAS by evaluating implemented multi-agent
applications. It aims to assess MAS
performances regardless of the used design
methodology and development tool.
The
evaluation
of multi-
agent
applications
The literature has revealed two
categories of evaluations in
this context: the evaluation of
the functional adequacy
(Kaddoum, 2009) and the
evaluation of global
performances. We mention as
example the work of (Joumaa,
2008) that interests in
assessing interactions in a
robots’ society.
Such evaluation is
considered in (Ben
Hmida, 2013) as
system dependent and
specific to a given
topic.
The solution proposed by (Ben Hmida, 2013)
is to evaluate MAS functional properties from
a generic point of view. It takes into account
three categories of characteristics: the
structural properties describing how agents
are organized in the system, namely:
communication, interaction, organization,
distribution and decentralization, the
behavioural properties describing the way the
system evolves in time and behaves towards
itself, its components, its environment and
other external systems : autonomy, openness,
adaptation and emergence, the third is the
interface properties focusing on the
relationship between the MAS and the outside
whether it is its environment, a different
system or a human actor: personalization,
delegation, intelligibility and the situation in
the environment.
Generic
Fuctional-
Characterist
ics-Based
approaches
We interest especially in Ben
Hmida works in which
structural properties are
evaluated, more particularly
communication (Ben Hmida,
2008) and organization (Ben
Hmida, 2012). In this context,
a graph-theory based approach
is proposed. It follows a three-
step process: observation,
modelling and measuring.
The existing works are
essentially oriented
towards structural
characteristics and
neglect behavioural
and interface ones.
Behavioural and interface characteristics are
not yet evaluated from a generic point of view.
We argue that behavioural properties may
affect considerably MAS performances so
that measuring only the structural
characteristics seems to be not enough. Thus,
our challenge is to propose an approach to
evaluate behavioural properties, and then test
it on real world applications. At this stage of
our research work, we are interested in the
evaluation of openness and its impact on the
system.
ICEIS 2017 - 19th International Conference on Enterprise Information Systems
592

But, they take into account other associated aspects.
For example, (Vercouter, 2001) evaluated the
approaches dedicated to managing openness in MAS
namely the centralized and the distributed
approaches. Both of them were compared to identify
the more advantageous one by using few criteria,
namely the number of agents to communicate with,
the relevance of other agents representation and the
robustness of the system. In (Berreur, 2005),
openness is measured by referring to three aspects:
openness on the environment, openness to the user
and openness to other agents. To this end, an
evaluation criterion was proposed. It consists in
quantifying each aspect depending on the number of
exchanges between the agent and one of the three
facets. Other efforts are devoted to assessing trust
level in open MAS. Trust is, in fact defined as a
relationship between two agents where a trustor agent
performs for estimating the credibility of the trustee.
In this context, (Khosravifar, 2009) provides a trust
assessment process to evaluate the trustworthiness of
the participating agents. In the present work, we
interest in structural openness. We aim to evaluate the
latter property as defined in the literature and bring,
as a consequence, added value to the field of MAS
evaluation.
4 PROPOSED APPROACH FOR
STRUCTURAL OPENNESS
EVALUATION
The addition and removal of entities in MAS make its
structure difficult to analyse. Thus, it is necessary to
reduce this complexity by using an easy to handle
mean. Modelling represents an appropriate technique
allowing the explanation of the structure and the
determination of some important aspects. So, in order
to evaluate structural openness in MAS, we propose
to adopt the process of (Ben Hmida, 2013):
observation, modelling and measure.
4.1 Observation
In our evaluation approach, observation consists in
generating traces each time a significant event occurs
in the MAS. That’s to say, when an addition or/and a
removal of agents or/and interactions is detected, a
specific model is produced. Such operation is
performed through software probes based on Aspect
Oriented Programming (AOP). As for the generated
model, it will be discussed and justified in the
following paragraphs.
4.2 Modelling
Due to its dynamicity and strong evolution, structural
openness in MAS requires a changing-nature model
to be represented. In other words, the proposed model
must be dynamic and have to allow highlighting the
different events causing the observed modifications.
Besides, whenever a system consists of many single
components interacting together, it becomes natural
to represent it as a graph where each node stands for
one component and interactions are symbolized by
edges.
Thus, a dynamic graph seems to be appropriate to
represent the structure of open MAS. It is indeed a
powerful mean that has interested many researchers
i.e (Afrasiabi Rad, 2016), (Zaki, 2016) and (Beck,
2016). They all give a consensual definition of a
dynamic graph and define a set of related metrics.: it
is a sequence ᴦ := (G1,G2,…,Gn) where each static
graph Gi := (Vi, Ei) models a set of objects Vi, called
vertices or nodes and their relationships
⊆
ViVicalled edges or arcs. The indices refer
to a sequence of time steps: 1, 2, … , .The
graph G
i+1
is obtained from G
i
by simple
modifications: additions and removals of vertices and
edges.
Many dynamic graphs were studied and analyzed
in the literature. We mention mainly: Complex
Networks (Boccaletti, 2006), evolving graphs
(Ferreira, 2003) and (Bui-Xuan, 2003), Re-
optimization graphs and finally cumulative graphs
and Space-Time Networks. These graphs are
classified in (Pigné, 2009) following three criteria:
Graph dynamicity: it refers to the ability of the
dynamic graph to undergo modifications in its
components. In this context, (Zaki, 2016)
distinguishes between two types of dynamic
graphs. The first is the fully-dynamic graphs
allowing modifications in nodes, arcs and their
associated attributes namely Complex
Networks and evolving graphs. The second is
the partially-dynamic graphs allowing changes
only at some components namely Re-
optimization graphs, cumulative graphs and
Space-Time Networks.
The knowing level of events evolution:
According to this criterion, dynamic graphs are
classified into two categories: those whom
evolution is known in advance such as complex
networks, Re-optimization graphs and
cumulative graphs, and those whom changes
are not initially known but progressively-
revealed in time like evolving graphs and
Space-Time Networks.
Using Evolving Graphs to Evaluate Structural Openness in Multi-Agent Systems
593
The evolution process of the graph: this
criterion distinguishes between dynamic
graphs depending on how the events of the
evolution are generated. In fact, the process to
generate the events may be described in the
model such as in complex networks or are
simply the result of random applications, which
is the case for other dynamic graphs
Actually, an open MAS is a strongly-dynamic
system which permit any operation of addition and
removal of agents and interactions. Its environment is
so uncertain that it is impossible to know in advance
which are the events responsible for the structural
change or how are they generated. Therefore, the
dynamic graph that we will base on should have the
following properties: a full dynamicity, a
progressively-revealed events evolution and an
unknown evolution process. So, we say that an
evolving graph is more appropriate to model
structural openness in MAS.
Evolving graphs are studied in several works. We
mention mainly (Ferreira, 2002), (Monteiro, 2006)
and (Jarry, 2008). Its definition is given below:
Let be given a graph G (V, E) and an ordered
sequence of its sub-graphs SG = G
1
,G
2
, . . . ,G
T
such
that
⋃
Gi G
. Let S
T
= t
0
, t
1
, t
2
. . . t
T
be a sequence
of time instants. Then, the system GE = (G, S
G
, S
T
),
where each Gi is the sub-graph during [t
i−1
, t
i
[, is
called an evolving graph. The graph G is called
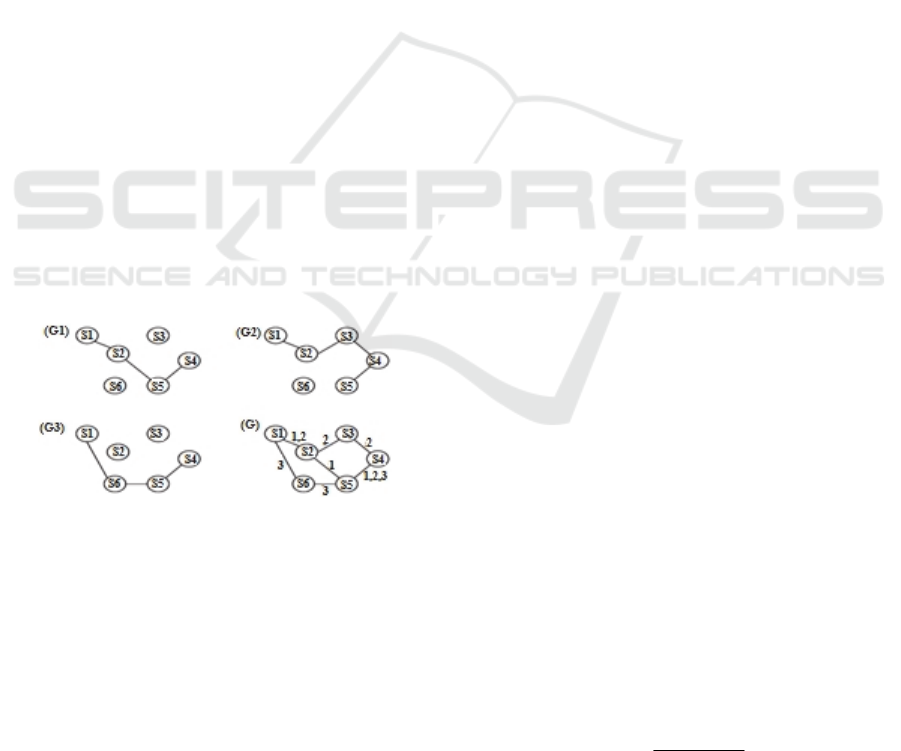
underlying graph. Figure1 shows an illustrating
example of an evolving graph built from three sub-
graphs G
1
, G
2
and G
3
.
Figure 1: Illustrating example of an evolving graph.
Our evolving graph consists of a set of vertices V
that represent the agents having existed in the system
and a set of arcs E symbolizing the interactions
having appeared over the time. Each edge stands for
a transmitted message between two agents. Thus, our
graph is directed for the simple reason that any
message has a sender and a receiver agent. We
propose to label each node of the underlying graph G
with a vector < id, P
v
, app
v
, disp
v
> where id is the
identifier of the corresponding agent, P
v
is the
presence vector of the node, app
v
is the number of
appearances of the corresponding agent in the system
and disp
v
is its number of disappearances. Similarly,
each arc of the underlying graph G is labelled with a
vector < SrcId, DesId, P
e
, app
e
, disp
e
> where SrcId is
the identifier of the sender agent, DesId is the
identifier of the receiver agent, P
e
is the presence
vector of the arc, app
e
is the number of appearances
of the corresponding interaction and disp
e
is its
number of disappearances. The generated graph will
be exploited in order to propose measures to evaluate
the structural openness in MAS. This is what we will
detail in the next paragraph.
4.3 Measuring
In this section, we will analyse our model and
estimate some appropriate measures.
4.3.1 Alpha Index α
Alpha index is the measure used to estimate the
variation of the number of agents. It is applied on the
underlying graph G and expressed as the difference
between the total number of nodes’ appearances and
their total number of disappearances:
α = ∑
v
app
v
- ∑
v
disp
v
(1)
α reflects the nature of the evaluated open MAS.
In fact:
If α>0 then MAS is said to be increasing.
If α<0 then MAS is said to be decreasing.
If α=0 then MAS is said to be conservative.
4.3.2 Degree of Structural Extensibility χ
The degree of structural extensibility is proposed to
evaluate how much the system is able to manage the
free entering and leaving of agents. It is estimated
through the renewal rate of the graph and applied on
the sequence of the sub-graphs S
G.
This latter is
defined in (Pigné, 2009) as follows:
Let be a structure of a dynamic graph observed on two
instants S
1
and S
2
. The renewal rate tr (S
1
, S
2
) is the
number of changes M between the two dates
compared to the number of elements |S1| in the
starting structure.
We consider that the sub-graph G
i
is the structure
on which we conduct our calculation and we interest
only in the additions and removals of nodes. Thus,
the renewal rate of G
i
is defined as follows:
tr (G
i-1
,
G
i
) =
)G(Ord
M
1i
(2)
ICEIS 2017 - 19th International Conference on Enterprise Information Systems
594

M is the total number of appearances and
disappearances of nodes and Ord(G
i-1
) is the number
of nodes in the sub-graph G
i-1
.Then, we define χ as
the average renewal rate of G
i
.
χ =
1N
)G,G(tr
N
1i
i1i
(3)
N stands for the number of sub-graphs in the sequence
S
G
.
χ may reflect the degree of scalability of the open
MAS. This latter is defined as the ability of the system
to adapt itself from a dimensional point of view as to
larger sizes than to smaller ones while maintaining its
efficiency. Therefore, when χ 0.5 i.e. when the
number of entering and leaving agents between G
i-1
and G
i
exceeds on average the half of the existing
agents in G
i-1
, the MAS is qualified as highly scalable.
On the opposite case, the system is low scalable.
4.3.3 Structural Impact π
j
Structural impact π
j
is the proportion of time during
which the agent j is functional in the MAS. Based on
the sequence of sub-graphs S
G,
we define it as the ratio
between the cumulative age of the corresponding
node S
j
and the observation duration D. The
cumulative age of an element in a dynamic graph is
defined in (Pigné, 2009) as the sum of the durations
of the time intervals during which it is present in the
dynamic graph:
D
)Sj(CA
,VS
jj
(4)
In open MAS where agents can be removed at any
time, an agent that persists for a long time is said to
be stable. It may acquire a significant amount of
information and behave as a leader. Therefore, the
structural impact π
j
may reflect the degree of stability
of the agent j in the evaluated MAS. The more π
j
is
elevated, the more the corresponding agent is stable
and its convergence to the leadership is important.
4.3.4 Dependency Rate τ
j
We call the dependency rate τj the relationship
between the number of added interactions by an agent
j and the possible number of interactions could be
added by the same agent. Indeed, the number of the
established interactions by an agent j, symbolized by
a node Sj, is the sum of the outgoing edges’ activities.
Actually, the activity of an edge e is denoted δ
E
(e) and
defined in (Ferreira, 2003) as the number of its
presence intervals. The formula of τ
j
is as follows:
Ti
0i
ivv
K
kjE
vkj
jv
)G,S(P
))S,S((
j,VS,S,S
(5)
In open MAS, an agent has a partial view of its
environment. It must cooperate and interact with
other agents in order to acquire what it needs to
achieve its goal. Thus, the dependency rate τj reflects
the deficiency degree in terms of capabilities and
resources that leads the corresponding agent to
establish new interactions.
4.3.5 Lambda Index λ
Lambda index λ estimates the variation of the number
of interactions. It is applied on the underlying graph
G and expressed as the difference between the total
number of edges’ appearances and their total number
of disappearances:
λ = ∑
E
app
e
- ∑
E
disp
e
(6)
Lambda index λ reflects the effect of the structural
openness on the abundance of communication
between the agents. In fact:
If λ ≥0 then we say that the structural openness
promotes the abundance of communication in
the system.
If λ <0 then we say that the structural openness
demotes the abundance of communication in
the system.
4.3.6 Transitivity T
j
We define transitivity T
j
as the ability of an agent j to
acquire data from the other agents. We express it as
the relationship between the number of existing
journeys between the corresponding nodes S
i
and S
j
denoted N
ij
and the number of all the existing journeys
in the graph N
J
. In (Ferreira, 2003), a journey in an
evolving graph is defined as follows:
Let R be a path R = e
1
, e
2
... e
k
with ∈ . Let
R
σ =
σ
1,
σ
2
,...,σ
k
be a time schedule indicating that edge
e
i
is to be traversed at time σ
i
.
A journey J = (R, R
σ
)
is defined if and only if R
σ
is in accordance with R
and GE i.e., J allows for a traversal over time from u
to v in GE.
The formula we propose in order to calculate T
j
is:
J
j
j
N
Ni
Tj,S
(7)
Using Evolving Graphs to Evaluate Structural Openness in Multi-Agent Systems
595
In this case, an interaction is seen as a trust
relationship. It is progressively acquired by agents
thanks to the MAS openness. Thus, the more Tj is
elevated, the more agent j is trusted. The agent having
the greatest transitivity is said to be the more stressed
to the communication over the time.
4.3.7 Structural Distribution ρ
In open MAS where agents and interactions can
freely enter and leave, coalition structures can be
progressively created. In other words, agents having
compatible goals form a group and cooperate together
in order to perform a common task (Hasan, 2013).
Thus, we define ρ as the number of maximal time-
connected components. This latter is defined in
(Ferreira, 2003) as follows:
A maximum time-connected component (MTCC) in
an evolving graph is the maximum set of vertices
U ⊆ such that for any pair of u, v ∈, there exists
a journey from u to v and a journey from v to u using
only vertices in U.
According to (Gruszczyk, 2008), When agents
cannot complete their tasks individually they may
exchange information and form coalitions which
gives them best efficiency in terms of solved problem.
Thus, structural distribution ρ allows determining the
effect of the structural openness on the system’s
performance. We say, the more the number of
obtained MTCC is elevated, the faster agents are able
to achieve their local goals.
5 EXPERIMENTATION AND
RESULTS
Our approach is tested on a multi-agent road traffic
application described as follows.
5.1 Agent-Based Test Application
The tested multi-agent application is a road traffic
simulator. It allows, at any time, the addition and
removal of agents and interactions. We believe that
testing such application is much more useful for MAS
community when it is used to compare coordination
strategies in dynamic scenarios. But, it is also
beneficial for us in the sense that we can take
advantages of its dynamicity and openness to conduct
our calculation and validate our evaluation approach.
Actually, our road traffic simulator is developed upon
the JADE framework and made of several agent
types:
Driver: this agent is able to stop, to forward, to
choose a path, to change its position and to
respect the lights at intersections. It can
communicate with its predecessor, its pursuer,
the road on which it is moving and the
intersection met in its movement. Its identifier
is prefixed by the word “Cond:”.
Road: this agent interacts with drivers
providing them with information concerning
their predecessors and pursuers. Its identifier is
prefixed by the word “Route”.
Intersection: this agent conveys information
concerning lights’ states and drivers at the
same intersection. Its identifier is prefixed by
the word “Carrefour”.
Light: this agent has for role to inform drivers
and pedestrians about its current state. It has an
identifier prefixed by the word “Feu”.
Pedestrian: it aims to cross a road while taking
into account the lights state. It has an identifier
prefixed by the word “Pieton”.
5.2 Results and Interpretations
Due to its strong dynamicity, our simulator generates
evolving datasets: the user can’t predict neither the
number of appearing and disappearing agents nor the
way they coordinate. That’s why, it seems judicious
to present a test case and analyse its results which are
with no doubt real datasets. As explained in section
4.2, we base on a directed evolving graph where each
edge is a transmitted message between two agents.
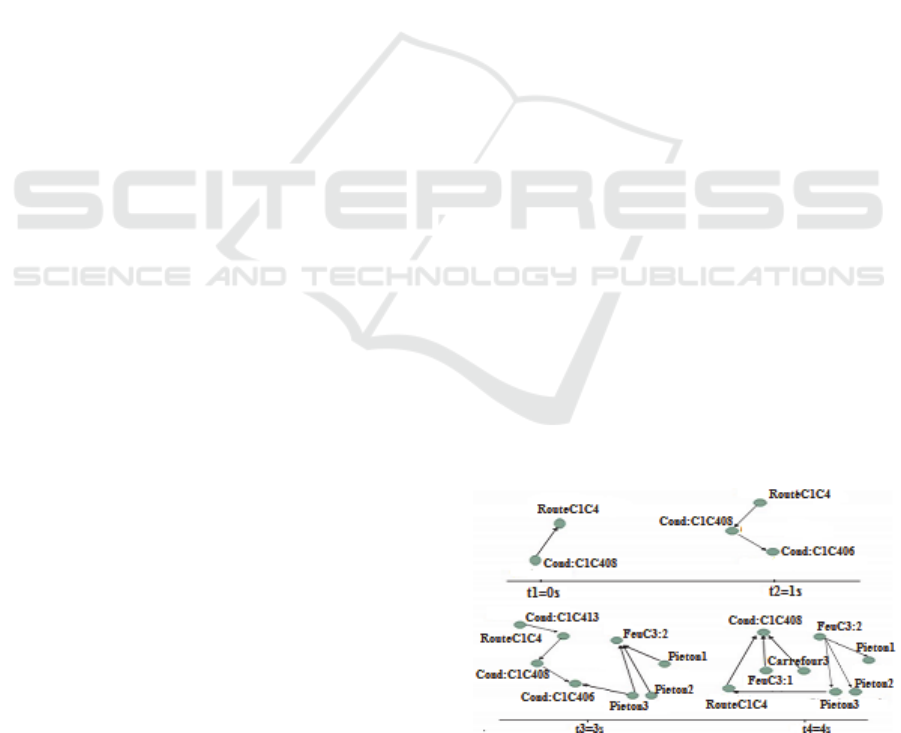
Figure 2 shows the sub-graphs S
G
representing the
evolution of the system during 4 seconds. The
different sub-graphs are generated using
Graphstream, a java library that focuses on the
dynamic aspects of graphs.
Figure 2: The set of sub-graphs S
G
generated during 4
seconds.
ICEIS 2017 - 19th International Conference on Enterprise Information Systems
596
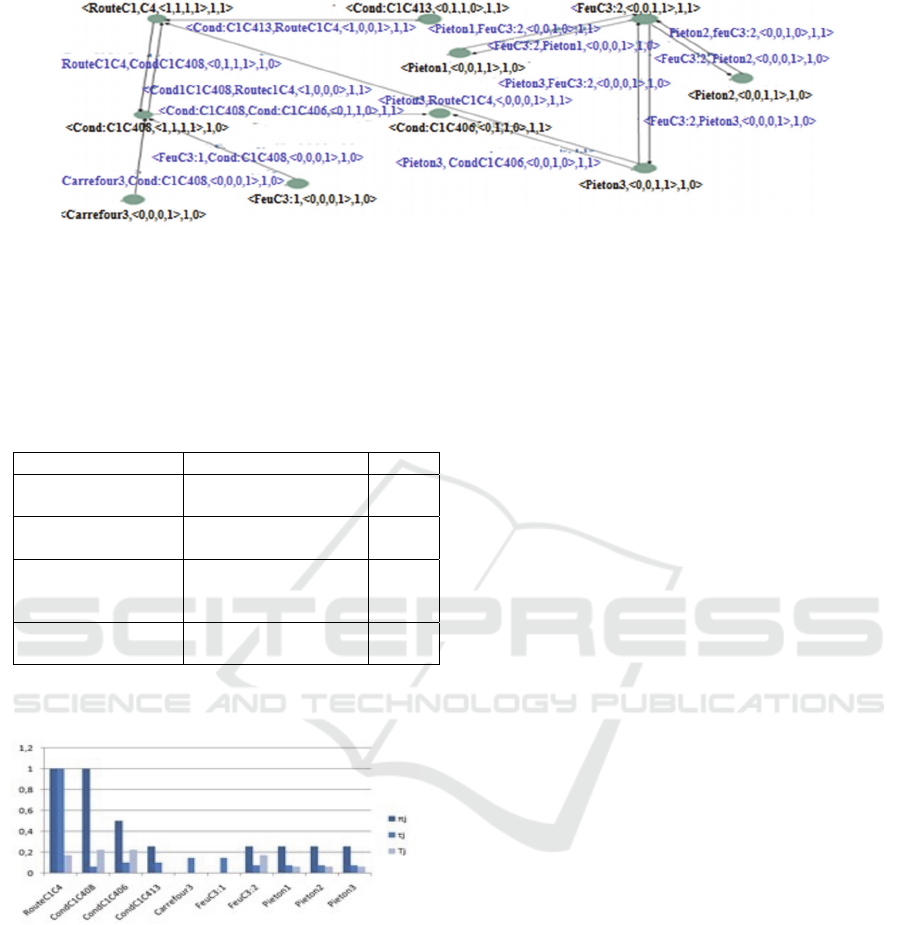
Figure 3: The underlying graph G.
Figure 3 shows the underlying graph G, the
aggregation of the previous sub-graphs.
Now, we can calculate our measures. The global
ones are presented in Table2.
Table 2: Global performance metrics.
Property Measure Value
Nature of the open
MAS
Alpha Index α 7
Degree of
scalability
Degree of structural
extensibility χ
0.89
The effect on the
communication
abundance
Lambda Index λ 5
Open MAS’
performance
Structural Distribution
ρ
4
As for the local measures, they are illustrated in
Figure 4.
Figure 4: Local performance metrics.
According to the obtained results, we have an
increasing trafic flow. Having a degree of structural
extensibility greater than 0.5, our system is said to be
high scalable. Its ability to manage the free entering
and leaving of drivers and pedestrians, is elevated
which reflects a high congestion level supported by
the simulated roads and helps to think about new
policies to make better the transport infrastructure.
Besides, the communication between
the agents is abundant and promoted in time. Thus,
our road trafic simulator is an interactive application
that puts together a set of social agents. The structural
openness of the application caused 4 coalitions. We
say that vehicles and infrastructure have a great
ability to communicate in order to get an optimal
transport network with efficient movement of traffic.
CondC1C408 have the highest value of π
j.
It is the
more stable agent in the system and the elected one to
be leader in the future. We can say also that
CondC1C408 is the more cost-effective in terms of
travel time and delay. RouteC1C4 have the greatest
dependency rate τ
j
which means that it has to interact
with other agents in order to overcome the issue of
capabilities insufficiency and avoid as a consequence
serious problems like accidents . Having the more
elevated transitivity T
j
, CondC1C406 and
CondC1C408 are the more trusted and the more
stressed to the communication over the time. Besides,
Route C1C4 is the road having the greatest
transitivity. This latter is then usually used by drivers
and pedestrians and that can be subject to traffic jam.
6 CONCLUSION
In this paper, we presented an evaluation approach of
structural openness in MAS. The proposed method
follows three steps: observation, modelling and
measure. The modelling technique is based on an
evolving graph which is used to estimate metrics to
get a clear idea about the quality of the open MAS.
The tests and experimentations were carried out on a
road traffic simulator, an open multi-agent
application which puts together a set of volatile and
persistent agents. The obtained results allowed us to
validate the proposed evaluation model and to give
some interpretations related to the underlying road
traffic state. As a perspective of this work, we aim to
focus on two points. The first consists in working on
the functional openness interesting in the internal
evolution of agents and interactions. The second is to
evaluate the behavioural characteristics in MAS:
adaptation, emergence and autonomy.
Using Evolving Graphs to Evaluate Structural Openness in Multi-Agent Systems
597

REFERENCES
Afrasiabi Rad, A., 2016. Social Network Analysis and Time
Varying Graphs. Ph.D dissertation, University of
Ottawa,Canada.
Beck, F., Burch, M., Diehl, S., Weiskopf, D., 2016. A
Taxonomy and Survey of Dynamic Graph
Visualization. In Computer Graphics Forum.
Ben Hmida, F. B., Séguy, A., and Dupas, R. 2012.
MultiAgent Systems for Production Planning and
Control in Supply Chains. In Proceedings of the 9th
International Conference on Distributed Computing
and Artificial Intelligence (pp. 205- 212). Springer
Berlin Heidelberg.
Ben Hmida, F., Lejouad Chaari, W., and Tagina, M. 2008.
Performance evaluation of multiagent systems:
communication criterion. In Proceedings of the 2nd
KES International Conference on Agent and Multi-
Agent Systems: Technologies and Applications (pp.
773-782). Springer Berlin Heidelberg.
Ben Hmida, F., 2013. Evaluation des performances des
systèmes multi-agents. Ph.D dissertation, University of
Manouba,Tunisia.
Berreur, P., 2005. Evaluer les systèmes multi-agents.
Technical report. Pellucid 5FP IST-200134519,
University of Joseph fourier, France.
Boissier, O., Gitton, S., and Glize, P. 2004.
Caractéristiques des Systèmes et des Applications.
Systèmes multi-agents / Observatoire français des
techniques avancées, ARAGO 29.
Boccaletti, S., Latora , V., Moreno, Y., Chavez, M., Hwang,
D-U., 2006. Complex Networks: Structure and
Dynamics. Physics reports., 424(4), 175-308.
Bui-Xuan, B., Ferreira,A., Jarry,A., 2003. Computing
Shortest, fastest and foremost journeys in dynamic
networks. In International Journal of Foundations of
Computer Sciences, April,2003, 14(02), 267-285.
Cernuzzi, L., Rossi, G., & Plata, L. 2002. On the evaluation
of agent oriented modeling methods. In Proceedings of
the 1st Workshop on Agent Oriented Methodology,
Seattle (pp. 21-30).
Demetrescu, C., Italiano, G., 2006. Fully dynamic all pairs
shortest paths with real edge weights. In Journal of
Computer and system Sciences. February 2, 2006,72(5),
813-837.
Ferreira, A., 2002. On Models and Algorithms for Dynamic
Networks: The case for evolving Graphs. In 4e
Rencontres Francophones sur les Aspects
Algorithmiques des Télécommunications (ALGOTEL’
2002), Mèze, France.
Ferreira, A., 2003. Building a Reference Combinatorial
Model For Dynamic Networks : Initial results in
Evolving Graphs. Ph.d dissertation, INRIA.
Gruszczyk, W., & Kwasnicka, H. 2008. Coalition
formation in multi-agent systems—an evolutionary
approach. In Computer Science and Information
Technology, 2008. IMCSIT 2008. International
Multiconference on (pp. 125-130). IEEE.
Hasan, M-R., and Raja. A., 2013. Emergence of Multiagent
Coalition by Leveraging Complex Network. In
Proceedings of AAMAS 2013 Fifth International
Workshop on Emergent Intelligence on Networked
Agents (WEIN'13), (pp 1-15).
Jarry, A., 2008. Connexité dans les réseaux de
télécommunication. Ph.D dissertation, University of
Nice, Sophia Antipolis, France.
Joumaa, H., Demazeau, Y., and Vincent, J. M. 2008.
Evaluation of multi-agent systems: The case of
interaction. In Proceedings of the 3rd International
Conference on Information and Communication
Technologies: From Theory to Applications, (pp. 1-6).
IEEE.
Kaddoum, E., Gleizes, M. P., George, J. P., Glize, P., and
Picard, G. 2009. Analyse des critères d'évaluation de
systèmes multi-agents adaptatifs. In Journées
Francophones sur les Systèmes Multi-Agents, (pp. 123-
132).
Khosravifar, B.,Gomrokchi,M., benTaher,J., Thiran, P.,
2009. Maintenance-Based Trust of Multi-Agent
Systems. In Proceedings of the 8
th
International
Conference on Autonomous Agents and multi-Agent
Systems-Volume 2 (pp.1017-1024). International
Foundation for Autonomous Agents and Multi-Agent
Systems.
Monteiro, J., Goldman, A., & Ferreira, A. 2006.
Performance evaluation of dynamic networks using an
evolving graph combinatorial model. In Wireless and
Mobile Computing, Networking and Communications,
2006.(WiMob'2006). IEEE International Conference
on (pp. 173-180). IEEE.
Occello, M., Guessoum, Z., and Boissier, O. 2002. Un
essai de définition de critères pour l étude comparative
de plates-formes multi-agents. Technique et Science
Informatiques (TSI), 21(4), 549-552.
Pigné, Y., 2009. Modélisation et traitement décentralisé
des graphes dynamiques : application aux réseaux
mobiles ad hoc (pp.1-41). Ph.D dissertation, University
of Havre, France.
Tveit, A. 2001. A survey of agent-oriented software
engineering. In NTNU Computer Science Graduate
Student Conference, Norwegian University of Science
and Technology. Vercouter, L., 2001. Conception et
mise en œuvre de systèmes multi-agents ouverts et
distribués. Ph.D dissertation, University of Jean
Monnet and School of Mines de Saint-Etienne, France.
Valckenaers, P., Sauter, J.A., Sierra, C., Rodrıguez
Aguilar, J.A. 2007. Applications and environments for
multi-agent systems. In Autonomous Agents and Multi-
Agent Systems, 14(1), 61–85
Vercouter, L., 2001. Conception et mise en œuvre de
systèmes multi-agents ouverts et distribués. Ph.D
dissertation, University of Jean Monnet and School of
Mines de Saint-Etienne, France.
Zaki, A., Attia, M., Hegazy, D., Amin, S., 2016.
Comprehensive Survey on Dynamic Graph models. In
International Journal of Advanced Computer Science
and Applications, 7(2), 573-582.
ICEIS 2017 - 19th International Conference on Enterprise Information Systems
598
