
Recovery-Oriented Resource Management in Hybrid Cloud
Environments
Yasser Aldwyan
1,2
and Richard O. Sinnott
1
1
School of Computing and Information Systems, The University of Melbourne, Australia
2
Department of Computer Science, Islamic University in Madinah, Saudi Arabia
Key
words: Cloud Computing, Hybrid Cloud, Reliability, Recovery Oriented Computing (ROC), Fault Tolerance,
Virtual Infrastructure Management, Resource Management.
Abstract: Cloud-based systems suffer from an increased risk of individual server failures due to their scale. When
failures happen, resource utilization and system reliability can be negatively affected. Hybrid cloud models
allow utilization of local resources in private clouds with resources from public clouds as and when needed
through cloudbursting. There is an urgent need to develop cloudbursting approaches that are cognisant of
the reliability and fault tolerance of external cloud environments. Recovery oriented computing (ROC) is a
new approach for building reliable services that places emphasis on recovery from failures rather than
avoiding them completely since even the most dependable systems will eventually fail. All fault tolerant
techniques aim to reduce time to recover (TTR). In this paper, we develop a ROC-based fault tolerant
approach for managing resources in hybrid clouds by proposing failure models with associated feedback
control supporting a local resource-aware resource provisioning algorithm. We present a recovery-oriented
virtual infrastructure management system (RVIMS). Results show that RVIMS is more reliable than those
of single cloud environments even though TTR in the single cloud environments are about 10% less than
those of RVIMS.
1 INTRODUCTION
Cloud computing has become an important
paradigm in the field of Information Technology. It
encompasses important aspects such as self-service,
enhanced access to virtualized resources, such as
compute, i.e. virtual machines (VMs) and storage
resources, and on-demand capacity provisioning.
While cloud computing has many benefits, its main
advantage is the ability to provision and release
resources based on workloads (Voorsluys et al.,
2011). However, this ability poses a challenge when
the traditional single cloud model is used and the
data center overloaded. Hybrid cloud models can
help to overcome such issues by making the cloud
adaptive and allowing seamless utilization of
resources of public clouds along with the local
resources of private clouds.
As in other large-scale distributed systems,
failures in cloud computing are unavoidable due to
their scale (Javadi et al., 2012). When failures occur,
the utilization of resources, reliability and
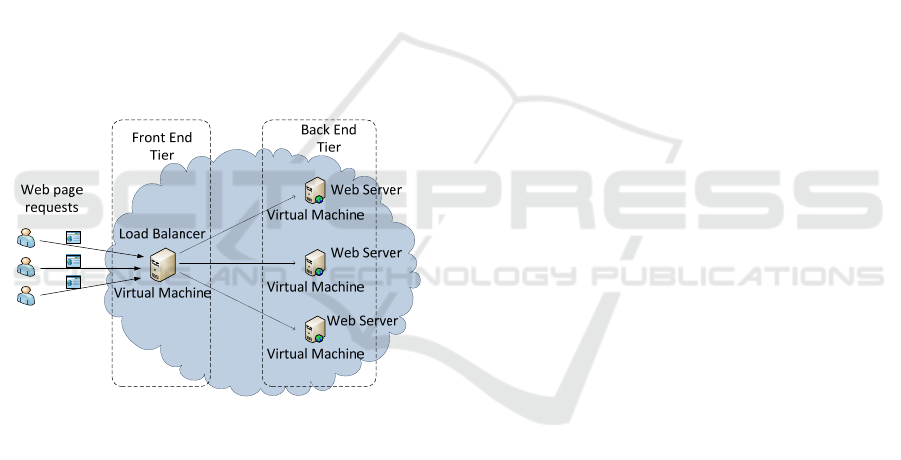
availability can be adversely affected. Consider a
web application running in a cloud. Figure 1 shows a
typical architectural model of the application that
consists of a load balancer running on a VM, (i.e., a
front end tier) and a number of web servers deployed
on other VMs in the cloud. The load balancer
distributes the incoming (http) requests for web
pages evenly across the back end servers, and the
back end servers process the requests and send back
the responses which can include web pages or other
web resources. Now, assume in a given period, the
load on these web servers increases dramatically.
This could result in a failure in performance if the
cloud management system was not aware of this
increase and could not take appropriate action, e.g.
by provisioning new VMs to run new web servers.
This failure could cause the CPU utilization of the
web servers to exceed predefined thresholds. The
response time thus becomes high and thus the
overall quality of service (QoS) will decrease. This
situation exemplifies an undesirable form of
utilization, i.e., overutilization of resources.
Furthermore, under-utilization of resources is
another unwanted form of resource utilization. This
situation occurs when the incoming requests
decrease and the cloud management system does not
Aldwyan, Y. and Sinnott, R.
Recovery-Oriented Resource Management in Hybrid Cloud Environments.
DOI: 10.5220/0006359602530265
In Proceedings of the 7th International Conference on Cloud Computing and Services Science (CLOSER 2017), pages 225-237
ISBN: 978-989-758-243-1
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
225
decrease the number of resources given to the cloud
application. At any given time a VM crash can cause
unavailability of the cloud application and affect the
QoS. To overcome these issues, cloud management
systems need to be fault tolerant and have the ability
to provide cloud applications with appropriate
features, such as auto-scaling and load balancing,
across multiple clouds. This requires the cloud
management system supports fault tolerant
techniques in hybrid cloud environments.
Most existing fault tolerant approaches attempt
to predict failures and avoid them before they occur.
However, failures will inevitably happen. Thus, in
our work we attempt to detect failures and recover
from them as rapidly as possible i.e. our proposed
fault tolerant techniques put effort to reduce time to
recover (TTR). The aim of our research is to
develop an approach for enabling fault tolerant
techniques in hybrid cloud environments that will
enable those environments to be recovery-oriented,
adaptive and self-managed in order to optimize the
utilization of resources; improve availability and
reliability and minimize human interventions.
Figure 1: Example architectural model of cloud-based web
application.
We adopt a recovery-oriented computing approach
(ROC) (Berkeley, 2004). Specifically, we
investigate failure models for hybrid clouds. To
support this, we first explore failure models by
identifying failures and their characteristics that can
impact on TTR. We then develop a feedback control
system. To support this, we propose a system model
based on a control theory (Yixin et al., 2005), which
provides a number of mechanisms for designing
automated self-managing computing models. The
model periodically monitors the health of resources,
detects failures and recovers from failures. We use
this to establish a recovery-oriented virtual
infrastructure management system (RVIMS). We
apply RVIMS in a hybrid cloud environment and
show how it can subsequently be used to manage
cloud services in fault tolerant hybrid cloud
environments.
The rest of the paper is organized as follows.
Section 2 presents background and an overview of
cloud computing and ROC with focus on feedback
control models for self-managing computing
systems and virtual infrastructure management. In
Section 3 we present failure models for hybrid
clouds. Then in Section 4, the feedback control
model is proposed, including a local resource aware
hybrid cloud provisioning algorithm. In Section 5,
the architecture of RVIMS is presented. The
experiments and results are presented in Section 6.
Finally, conclusions and future work are presented
in Section 7.
2 BACKGROUND AND RELATED
WORK
This section aims to provide an overview of cloud
computing with particular focus on hybrid cloud
models. We introduce relevant concepts and services
and provide a brief overview of ROC; the control
theory for self-managing computing systems, and
virtual infrastructure management systems for
hybrid clouds.
Cloud Computing is based on two main
technologies: service oriented architectures (SOA)
and virtualization technology (El-Refaey, 2011).
SOA are an architectural model in which everything
should be provided as a service, including
processing power, networks, storage, IT
infrastructure, software, hardware and other IT
resources. El-Refaey (El-Refaey, 2011) defines
virtualization technology as technology that provides
an abstraction of computing resources: examples
include CPUs, memory, storage and networks. This
has led to the division of physical servers into
multiple virtual machines (VMs). This technology is
significant in cloud computing because it facilitates
the management of resources and improves the
utilization of those resources.
A Hybrid Cloud, also known as a Multi-Cloud
in related literature (Grozev and Buyya, 2014) is a
combination of two or more different cloud
infrastructures: private, public or community. A
major benefit of the hybrid cloud model is that it
takes the attributes of both public and private clouds
and combines them into a unified, automated, and
well-managed cloud computing offering. A hybrid
cloud takes advantage of a public cloud’s scalability
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
226

and cost-effectiveness while also providing the
control and high performance available in a private
cloud. However, utilizing resources from both
models in an optimized way is a major issue in
hybrid clouds, and to ensure a minimum level of
quality of service (QoS), providers must leverage
strategies that fulfil potentially diverse QoS
requirements.
Resource Provisioning is used for exercising
control over VMs or other cloud resources in cloud
systems. This is often used for launching,
suspending and terminating VMs. A hybrid cloud
resource provisioning service us used for
provisioning resources from different clouds. For
instance, if a user requests three VMs in a hybrid
cloud, the resource provisioning can launch one VM
from the private cloud and the other two from the
public cloud. Many factors can be considered when
provisioning resources in hybrid clouds including
local resource awareness. Local resource awareness
factors allows resource provisioning services to first
launch local resources, e.g. resources from private
clouds, and then, when local resources are at
capacity, launch resources on public resources
(Grozev and Buyya, 2014). This improves
scalability however it incurs additional complexity
and potential monetary cost.
Recovery-Oriented Computing (ROC) is an
approach developed by Berkeley and Stanford for
investigating innovative strategies and techniques
for building highly-dependable Internet services
(Berkeley, 2004). ROC places emphasis on recovery
from failures rather than avoiding failures. The
motivation behind this approach is that even long-
lasting and healthy systems will periodically face
failures. There are three assumptions considered in
the ROC approach: Software and hardware will
definitely fail; not all failures can be predicted in
advance, and individuals can/do make mistakes.
Applying the ROC approach helps a system
designer change their way of thinking from paying
attention to failure avoidance to paying attention to
reducing the time needed to recover from a failure.
This shift of thinking can help create more robust
cloud platforms (Microsoft, 2014a). In (Microsoft,
2014a), the authors propose an approach to design
reliable cloud services based on ROC. They
introduce mean time to recover (MTTR) (or only
time to recover [TTR] (Microsoft, 2014b)) which is
the time needed to re-establish a service after a
failure. Minimizing TTR requires a system to be
recovered to a fully functional state as quickly as
possible.
A hybrid cloud model helps in overcoming
scalability and availability issues. A better approach
is to make such adaptations happen automatically
(Tanenbaum and Steen, 2006). This is often known
as autonomic computing or self-managing systems,
such as IBM’s Autonomic Computing and
Microsoft’s Dynamic Systems Initiative. A main
goal of these systems is to minimize the costs of
operation by increasing automation, i.e. making
systems self-managing without any human
interaction (Yixin et al., 2005). Making cloud
systems self-managing allows them to recover from
failures quickly and, subsequently the TTR can be
reduced.
To make automatic adaptations, monitoring and
adjustments of Cloud systems is required. One way
to achieve this is to organize systems to include
high-level feedback and control systems. These
systems are typically based on control theory which
gives a valuable set of methods for building self-
diagnosis, self-repairing, self-healing, self-
optimizing, self-configuring and ultimately self
managing computing systems (Yixin et al., 2005,
Tanenbaum and Steen, 2006).
A system that manages virtualized resources is
known as a Virtual Infrastructure Management
System (VIMS) or a virtual infrastructure (VI)
manager (Sotomayor et al., 2009). When designing
and implementing hybrid (or private) clouds,
Sotomayor el al. (Sotomayor et al., 2009) outlined
several features of public clouds that must be
considered: a hybrid cloud must provide a
consistent, identical, homogeneous view of all
virtualized resources without consideration of the
virtualization technology, e.g. Xen or VMware. It
must have control over the entire lifecycle of VMs,
such as VM disk image and software deployment. It
must be adaptive to meet dynamic needs for
resources, such as peak times where resources are
not sufficient for the current demand. Resource
provisioning in hybrid clouds must also be
configurable to different policies in order to meet the
systems’ requirements such as server consolidation
to save power and/or cost optimization or support
high availability demands.
OpenNebula (OpenNebula, 2016) is an example
of a VIMS. In our work, we propose a recovery
oriented virtual infrastructure management system
(RVIMS), which employs the proposed failure and
feedback control models in hybrid cloud
environments.
2.1 Related Work
A standard model of Cloud computing (i.e. a single
Recovery-Oriented Resource Management in Hybrid Cloud Environments
227

cloud) poses a number of challenges (Grozev and
Buyya, 2014). In terms of availability and reliability,
a data center outage can cause mass service
unavailability and all cloud clients will not be able to
access cloud resources (NIST, 2011, Armbrust et al.,
2009, Laing, 2012, Google, 2010). Another
challenge is scalability. This occurs when the cloud
is overloaded. Hybrid clouds as a kind of Multi-
Cloud (Grozev and Buyya, 2014) overcome these
issues by making the cloud adaptive and utilize
cloud resources from external public clouds.
Considerable work has been done in the
development of hybrid cloud open-source libraries,
e.g. Apache LibCloud (Libcloud, 2009). These
libraries provide a unified API for managing and
deploying cloud resources, such as VMs and storage
(Grozev and Buyya, 2014). However, they are not
concerned with resource provisioning. Likewise,
cross-cloud management services, such as
RightScale (RightScale, 2006) only offer (unified)
user interfaces and tools for managing different
clouds without implementing resource provisioning.
In terms of application deployment, projects like
Contrail (Cascella et al., 2012) aim at deploying
applications in hybrid cloud environments.
However, they only deal with provisioning and set-
up and do not consider the distribution of workload
and autoscaling of applications.
With regards to resource provisioning, Javadi et
al. (Javadi et al., 2012) propose hybrid cloud
resource provisioning policies in the presence of
resource failures. These policies only consider
resource failure correlations when redirecting user
requests for resources to suitable cloud providers
and not during deployment of VMs for user requests.
Furthermore, in (Mattess et al., 2013), the authors
propose a dynamic provisioning algorithm of
MapReduce applications across hybrid clouds,
however this does not handle failures. In contrast to
others, our hybrid cloud resource provisioning
approach considers: failures that may occur during
the whole lifecycle of cloud applications; recovery
mechanisms based on recovery-oriented computing
(ROC) (Berkeley, 2004); local resource awareness
issues (Grozev and Buyya, 2014) to reduce the cost,
and offers a multi-tier architectural model suited for
web-based applications.
Significant efforts have been made in the
development of virtual infrastructure management
systems (Sotomayor et al., 2009). These kind of
management systems are often called Multi-Cloud
services when they support multiple clouds (Grozev
and Buyya, 2014). Amazon Elastic Compute Cloud
(Amazon EC2) (Amazon, 2016) and Google
Compute Engine (Google, 2016) provide single-
cloud VIMS. On the other hand, Eucalyptus
provides a VIMS across hybrid clouds, however the
clouds have to be compatible with Amazon Web
Services (AWS) (Eucalyptus, 2008). They also lack
fault tolerant techniques to make them more reliable
and resilient. In contrast, we propose a recovery-
oriented virtual infrastructure management system
(RVIMS) suitable for hybrid cloud environments
that is failure-aware and leverages control theory.
This offers self-managing features for systems
(Yixin et al., 2005). We also facilitate the process of
adding new clouds to the system. Lastly, we develop
a vendor-independent cloud agent that provides
RVIMS with feedback messages to monitor
resources across multiple clouds.
3 FAILURE MODELS FOR
HYBRID CLOUDS
In this section, we explore failure models for hybrid
cloud systems. We identify possible failures and
their characteristics and potential recovery solutions.
Our failure models are adapted from Resilience
Modeling and Analysis (RMA), i.e. an approach for
improving resilience at Microsoft (Microsoft,
2014b). This approach adopts the main ideas behind
ROC, i.e. failures will eventually occur and thus it is
necessary to try to reduce TTR to minimize the
impacts of such failures. There are six types of
failures in the proposed models: full private VM pool
capacity, cloud outage, VM crash, VM slowdown,
VM high load failures and VM low load failures as
illustrated in Table 1.
Table 1: Failures in hybrid clouds.
Failure
Recovery
Private Cloud
Solution
Hybrid Cloud
Solution
Full Private
VM Pool
Capacity
Request rejected
Launch VMs on
public clouds
Cloud
Outage
No solution
Launch VMs on
healthy clouds
VM Crash
Launch a VM on
private cloud; or
reject
Launch new VM on
private or public
clouds
VM
Slowdown
Launch a VM on
private cloud; or
reject.
Launch new VM on
private or public
clouds
VM High
Load
Launch a VM to
distribute the load
Launch a VM to
distribute the load
VM Low
Load
Decrease the
running VMs
Decrease the number
of running VMs
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
228

A Full Private VM Pool Capacity Failure occurs
when the resources of a private cloud are fully
utilized, i.e. when VMs are allocated to other cloud
applications. Such a failure arises when the
infrastructure of the private cloud is overloaded.
Such a situation impacts both the cloud provider and
cloud application providers. The former will not be
able to meet one of its core needs, scalability while
the latter will find that their needs are unmet.
To detect a full private VM pool capacity failure,
it is necessary to monitor the number of idle VMs in
the cloud. If no idle VMs in the private cloud are
available (or a limited number) then mitigating steps
should be taken. In terms of recovery, when only a
private cloud is used, there is no solution for
recovery from this type of failure. The cloud
provider will often simply reject any request for
VMs needed for new cloud applications until VMs
become available. The cloud provider can solve this
issue by scaling the infrastructure out (i.e. adding
new physical resources), but this solution can cause
optimization issues in the longer term, i.e. the
infrastructure may subsequently be underutilized.
On the other hand, a hybrid cloud solution is more
efficient in terms of time and resource utilization.
Cloud providers can scale their cloud infrastructure
dynamically based on demand. This provides an
opportunity to scale up and down based on need, so
the utilization of resources can be optimized.
A Cloud Outage Failure has been known since
the emergence of cloud computing (Google, 2010,
Laing, 2012). In this failure, cloud application
providers and users cannot access services and
applications. The cause of this failure varies. It can
be a network partition of the data center, an outage
of the power supply or even a bug in cloud
infrastructure software. This failure can have a
major impact on cloud providers and end users
because all running services in the data center
become effectively unavailable. There are many
detection mechanisms that can be used here, e.g.
pinging where a dummy message is sent to a
suspected machine and a reply expected. Recovering
from this failure is a challenge. There is no solution
in a single cloud model (i.e. private cloud), however,
a hybrid cloud model can address it to some extent,
by launching VMs from healthy clouds, or at least
mitigate its impact on cloud applications and overall
cloud systems (Grozev and Buyya, 2014). This
cannot be guaranteed to be autonomously supported
however. Thus if a private cloud experiences a total
outage, then an automated process to launch new
VMs on the public cloud via redirecting request
from the private cloud may be impossible.
A VM Crash Failure can be caused by
hardware failure, a virtual machine monitor issue
(VMM), an operating system issue or indeed an
application software issue. The impact of this failure
is downtime of the VM and the inaccessibility of the
cloud applications running on the VM. This can
have major issues, especially when a cloud
application is running on only the impacted VM.
The situation is less risky when the application is
running on two or more VMs, e.g. as shown in
Figure 1 with a web application running on back end
servers with a load balancer running at the front end.
Like all distributed systems, detecting a VM failure
in cloud computing is non-trivial (Tanenbaum and
Steen, 2006). This is because, even if the suspected
VM is running (apparently) healthily, there may be
other issues such as network partitions or test
messages getting lost due to network issues. As with
cloud outage failures, the mechanism that can be
used to detect a VM crash can be as simple as
pinging.
Recovery from this failure in the private cloud
solution can be achieved by launching a new VM
from the single private cloud. However, the request
for a new VM may be rejected if there are no
available VM resources in the private resource pool.
If the cloud application is running on only one VM,
this will make the application unavailable for
potentially unpredictable periods. In contrast, in a
hybrid cloud solution this situation can be avoided if
the system is able to launch new VMs to the public
cloud. In this case, the amount of downtime is
determined by how long it takes to launch a new
VM and install and start the cloud application.
Knowing the temporal thresholds for such re-
establishment is a key aspect of TTR.
A VM Slowdown Failure is less problematic
type of failure than other failure types because the
application is still running and can respond, although
the response time may be relatively high. The cause
of this failure can be due to other VM issues.
Another cause may be input/ output (I/O) sharing
among multiple VMs running on a physical
machine. In (Armbrust et al., 2009), Armbrust et al.
introduce I/O sharing as an obstacle for cloud
computing that can unpredictably affect the overall
system performance. They claim that sharing CPUs
and memory among different VMs results in
improved performance in cloud computing but that
I/O sharing is a problem.
The effects of a VM slowdown failure on cloud
applications can include a delay in handling requests
and QoS subsequent decrease. There are two
possible methods for detecting a VM slowdown
Recovery-Oriented Resource Management in Hybrid Cloud Environments
229
failure. One is when a response time exceeds a
predefined threshold. The other is when the number
of requests per second exceeds a given threshold, i.e.
the cloud application responds after a delay.
Regarding failure recovery, the private cloud and the
hybrid cloud solutions are similar to solutions
involving the recovery mechanism of a VM crash
failure. The only difference is that the failed VM
will continue to serve, albeit with lower QoS, until
the new VM is ready to use.
A VM High Load Failure occurs when the
demands on a cloud application increase and
consequently the load on the VM increases and it
eventually becomes over-utilized. The cause of this
failure is related to high demands on the cloud
application itself, e.g. if it becomes very popular or
the business running it offers a temporary discounted
price on the offered services. For an application to
be ready for unexpected bursts, it needs to be
scalable dynamically and automatically. The impact
of this failure is on the QoS of the cloud application
and higher response times.
Detecting VM high load failures can be achieved
by monitoring CPU utilization, main memory
utilization and network traffic. A policy including a
set of thresholds for each VM (e.g. CPU and
memory) should be provided before launching the
application in the cloud. A failure occurs when a
resource exceeds a predefined threshold. To recover
from this failure in the private cloud, a new VM can
be launched in order to distribute the workload
evenly on all running VMs for the cloud application.
However, this will be problematic if the private
cloud is overloaded. Hybrid cloud systems can
overcome this issue by launching a new VM on a
public cloud and thus distributing the load to VMs
across multiple clouds.
In contrast to the previous failures a VM Low
Load Failure can introduce other undesirable forms
of resource utilization. This type of failure is caused
when the cloud application encounters lower
demands. As result, the resources will be
underutilized. The failure detection mechanism for
this failure is similar to the one for the VM high load
failure. There is a need for lower load thresholds for
cloud application resources. The failure happens
when the use of a monitored VM resource is below a
predefined threshold. In terms of failure recovery,
there is only one solution, and it can be applied in
either a private cloud or a hybrid cloud. This
solution is decreasing the number of running VMs
for the cloud application.
4 FEEDBACK CONTROL MODEL
FOR HYBRID CLOUDS
To detect failures and recover from them rapidly to
reduce TTR, there is an urgent need for a fault
tolerant system model based on the failure models
proposed in the previous section. As consequence,
we propose a self-managed feedback control model
in a hybrid cloud environment by organizing
components in a way that enables monitoring
resources and taking appropriate action in the
presence of failures. We describe the components of
the model and propose local resource-aware hybrid
cloud provisioning, failure detection and failure
recovery algorithms.
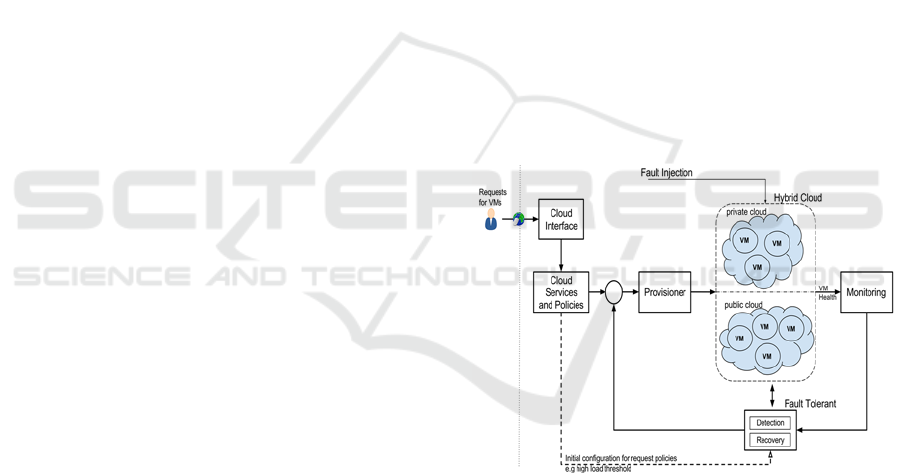
4.1 Components of Feedback Control
Model
As shown in Figure 2, the proposed model consists
of six components: the cloud interface component,
cloud services and policies components, provisioner
component, monitoring component and fault
tolerance components.
Figure 2: Feedback control model for hybrid clouds.
The Cloud Interface Component is an entry point
for cloud users (e.g. SaaS/cloud application
providers) to request cloud services upon which to
deploy their cloud applications. This component
receives requests for cloud services. After receiving
requests, the cloud interface component passes them
to the cloud services and policy component. Then,
the cloud interface component waits until it receives
a response from other components as to whether the
cloud platform is able to handle a given request by
provisioning the needed resources. If not, the request
is rejected. In both cases, the response is forwarded
to the cloud users.
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
230

The Cloud Services and Policies Component is
responsible for creating and initializing appropriate
cloud services and policy objects based on user
requests and then passing them to the provisioner
component for deployment. Cloud services can be
VMs used to deploy cloud applications, load
balancers used to distribute workloads across
multiple back end VMs or autoscaling services used
to scale up or down based on peak usage times.
Cloud policies are a set of rules or conditions that
help support failure detection and failure recovery
and to take appropriate action when one or more
conditions are met.
The Provisioner Component controls private
and public resource pools in the hybrid cloud
platform. It is responsible for provisioning VMs and
other cloud resources on private and public clouds.
This component provides a hybrid cloud
provisioning service using the provisioning
algorithm (see Algorithm 1). This service has a
number of advantages for the proposed model,
including providing awareness of local resources
and thus reducing monetary costs (Grozev and
Buyya, 2014). Furthermore, it has the ability to
easily add more resource pools either from public or
private clouds. Another benefit of this service is that
it provides a higher level of abstraction by hiding the
lower level communications and their
implementation across clouds.
Algorithm 1: Local Resource Aware Hy
b
rid Cloud
Provisioning.
input: nReqVMs //Number of VMs for a request
// VMs in unavailable clouds will not be considered
nIdleVMs getTotalHybridCloudIdleVMs();
listPrivateIdleVMs empty list;
listPublicIdleVMs empty list;
if nReqVMs ≤ nIdleVMs then
nPrivateIdleVMs
getTotalPrivatCloudIdleVMs();
if nPrivateIdleVMs ≥ 0 then
// add idle VMs from private pool
listPrivateIdleVMs.add(privateIdleVMs)
nRemainingVMs nReqVMs –
length of listPrivateIdleVMs
if nRemainingVMs > 0 then
// add idle VMs from public pool
listPublicIdleVMs.add(publicIdleVMs)
if listPrivateIdleVMs is not empty then
// Launch VMs from private pool
launchVM( listPrivateIdleVMs)
if listPublicIdleVMs is not empty then
// Launch VMs from public pool
launchVM(listPublicIdleVMs)
else
reject the request
The provisioner component manages the whole life
cycle of VMs in the model. Firstly it launches,
suspends, migrates and terminates VM instances
across multiple clouds. Secondly it runs
customization scripts. Thirdly it installs cloud agent
software on the top of VMs, to allow the cloud
management system to monitor the health of the
hybrid cloud resources. The provisioner component
is also able to migrate VM instances from public
clouds to private ones whenever VMs in the private
cloud become free thereby reducing cost.
With regards to the local resource-aware hybrid
cloud-provisioning algorithm shown in Algorithm 1,
the primary parameter is the number of VMs
required for user requests. The algorithm checks
whether the total number of idle VMs in the hybrid
cloud system is sufficient for the request. If the
resources are not sufficient, then the request will be
rejected and the algorithm will exit. Otherwise, the
algorithm will first attempt to provision VMs from
the resource pool of the private cloud. If there are
not enough VMs at that time, the algorithm will
provision VMs from public pools of available public
clouds.
The Monitoring Component is designed to
monitor VMs in both the private and public clouds.
Each cloud agent running in a VM checks the health
of the VM and periodically sends health messages to
the monitoring component. This component listens
on a (predefined) monitoring port and receives the
VM health messages. It extracts the health
information (e.g. CPU load) and sends it to the
failure detection component so that any failures can
be detected as early as possible.
The Failure Detection Component detects
failures that occur during the lifetime of cloud
applications running on VMs. It can detect the
occurrence of a failure based on the VM health
information coming from the monitoring component
or on information obtained by direct
communications with VMs (e.g. pinging and
measuring response times). The failure detection
component detects failures using two approaches:
message based failure detection methods (MFDM)
and direct failure detection methods (DFDM). In the
MFDM method, the component receives a health
message from a running VM, extracts the health
information for resources from that VM and then
compares this information with predefined
thresholds provided by cloud policies that are
received initially from the cloud services and
policies component. These policies can vary from
one cloud application to another based on user
requests for the specific cloud services. For DFDM,
Recovery-Oriented Resource Management in Hybrid Cloud Environments
231
the failure detection component continuously
(periodically) pings all running VMs across clouds
in order to detect their liveness. If there is a reply,
then the receiving VM is awake and healthy. If there
is no reply, the cloud manager repeats the request to
make sure the problem is not related to a sporadic
network issue. If there is no reply after three
attempts, the failure detector component detects a
VM crash failure. Every time a VM crash failure is
detected, the detector checks if other VMs in the
resource pool have crashed, and if so a cloud outage
failure is flagged and the resource pool of that cloud
is marked as unavailable. This helps the provisioner
to use live and available clouds only.
Another form of DFDM is a slowdown detection.
In this form, the failure detection component
periodically sends test messages to all VMs running
a cloud application and measures their response
time. If the response time is more than the
predefined threshold in the policy of the cloud
application, then a VM slowdown failure is
identified. When such a failure occurs, the failure
detection component puts a failure message into the
failure recovery component’s message queue,
prompting the component to take appropriate action
to recover from the failure as soon as possible.
The Failure Recovery Component reads failure
messages in its message queue and handles the
failure accordingly. The means of recovering from
failures depends on the nature of failure and the
cloud policy and autoscaling service associated with
the cloud services and policies component of the
cloud application. This component is used to reduce
TTR and thus enhance the utilization of resources.
The input parameter of this component’s
algorithm is a failure message. The algorithm checks
the failed VM object and the autoscaling service in
which the VM is involved. After that, the algorithm
takes the appropriate action based on the type of
failure. If the failure is a VM crash failure, then the
algorithm will unregister the failed VM from the
load balancer, terminate the failed VM, launch a
new VM and, finally, register the new VM with the
load balancer. If the failure is a VM slowdown
failure, then a new VM will be launched and
registered with the load balancer and, finally, the
failed VM will be released. If the failure is a VM
high load failure, then the algorithm will launch and
register a new VM with the load balancer. If the
failure is a VM low load failure, the cloud platform
will look first for a VM running on the public cloud
to be unregistered from the load balancer and then
released. Otherwise, any private VM for the cloud
application will be chosen. The reason for doing this
is to reduce the monetary cost since public VMs are
typically not free. We note that this algorithm
recovers from failures occurring during the lifetime
of the cloud application, while the failures occurring
before the deployment of the cloud application are
handled implicitly by the provisioner component.
5 SYSTEM ARCHITECTURE
Employing the previously mentioned models in
hybrid clouds requires the realization of a cloud
management system. A central goal of this kind of
system is to provide a high level of abstraction with
which to facilitate the process of managing
heterogeneous resources across different clouds
including monitoring resources in VMs across
different clouds. Ideally it should be possible to add
new public clouds easily. In this section, we present
a system architecture and implementation of a fault
tolerant cloud management system for hybrid cloud
environments supporting a Recovery-Oriented
Virtual Infrastructure Management System
(RVIMS).
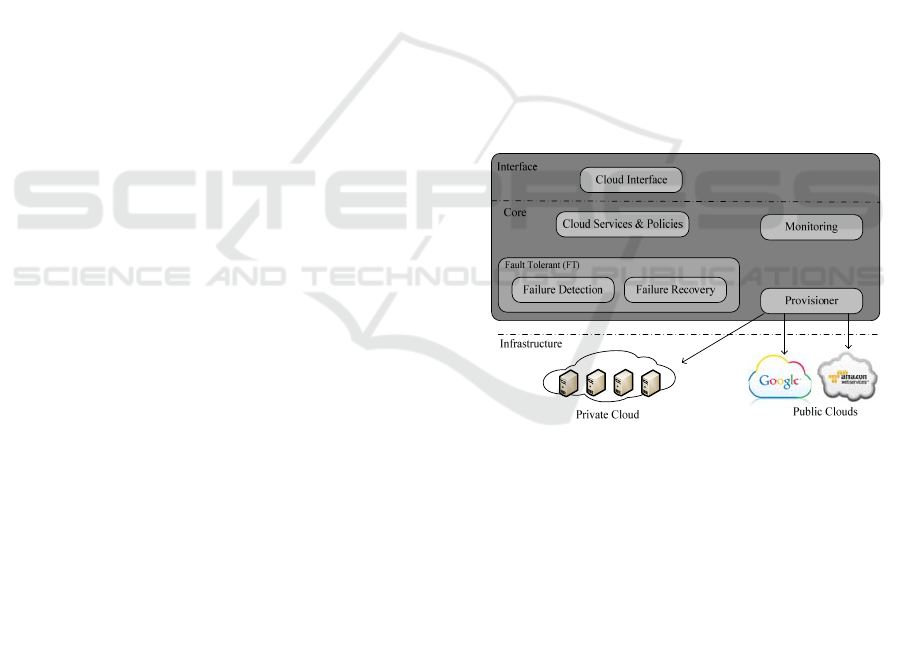
Figure 3: Architecture of RVIMS.
RVIMS has a number of key features. First, it
deploys cloud services, such as creating instances of
VMs and volumes, in different cloud platforms. At
present the system supports Google Compute Engine
(Google, 2016) and Amazon (AWS) (Amazon,
2016) clouds and the Australian National eResearch
Collaboration Tools and Resources (Nectar) research
cloud (Nectar, 2016). Secondly, it automates the
process of installing cloud applications and their
dependencies on VMs. Thirdly, it supports
OpenStack based cloud platforms (e.g. Nectar)
(OpenStack, 2010). Fourthly, it can easily support
new cloud platforms. Essentially, it can detect and
recover from all failures previously given in Table 1.
As shown in Figure 3, the architecture of RVIMS
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
232
consists of the same components found in the
feedback control model section. RVIMS offers a
cloud interface component, which acts as an entry
point for cloud application providers. In the core
part, we have four components: the cloud services
and policies, monitoring, provisioner, failure
detection, and failure recovery components. As
noted, the provisioner component is responsible for
providing higher levels of abstraction for managing
heterogeneous resources more readily.
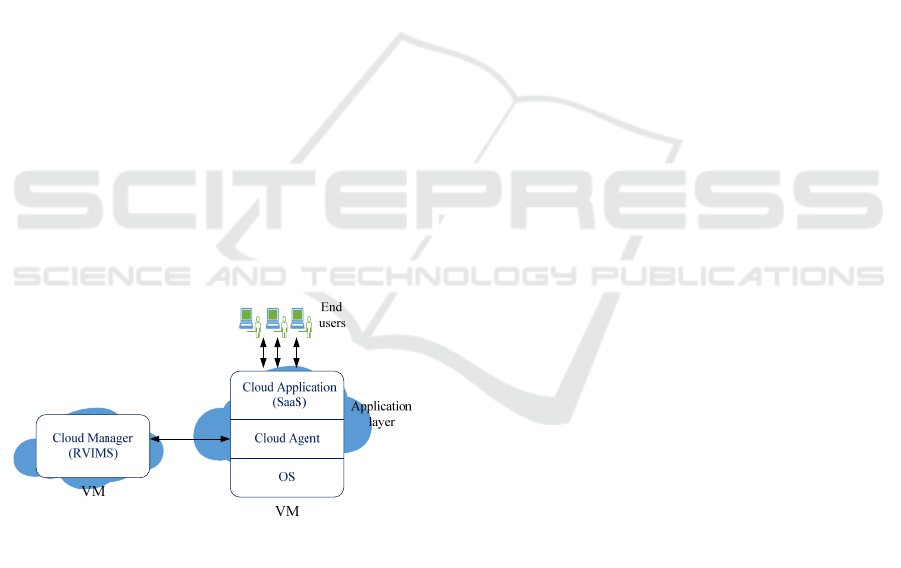
Figure 4 depicts the interaction between RVIMS and
a VM instance. To understand the RVIMS and VM
interactions, we consider the layered architecture of
a VM. The first layer from the bottom is the
operating system (OS) layer. The OS is chosen
during the process of launching a VM. The layer
above the OS layer is a cloud agent layer. This layer
allows management and monitoring of running VMs
regardless of the cloud platform from which they
were launched. To achieve this, the cloud agent has
to be in the application layer. On top of the cloud
agent layer, we have the cloud application itself.
With regard to the interaction between RVIMS and a
VM, the cloud agent monitors VM resources (i.e.,
CPU, memory, hard disk and network traffic) and
captures the behaviour of the cloud application. It
periodically sends a health message containing this
information to RVIMS. RVIMS reads the
information, detects failures if they have occurred or
failures that might subsequently arise and
subsequently resolves them.
Figure 4: Interaction between RVIMS and a VM instance.
6 EXPERIMENTS AND RESULTS
This section aims to evaluate RVIMS by considering
a recovery solution in a single (private) cloud as the
baseline and then applying recovery solutions in two
different hybrid cloud environments. The primary
evaluation metric here is TTR, a measurement that
starts when the system detects a failure and ends
when the failure has been successfully resolved.
Note that this work focuses on independent web
services and inter-process communications between
more complex applications and their deployment
management across hybrid clouds remains an area
for future work.
6.1 Experimental Testbed and Sample
Application
The RVIMS system was deployed in a hybrid cloud
environment consisting of three resource pools from
different cloud providers: Nectar, Amazon and
Google clouds. Nectar was used as a private cloud
and the others were treated as public clouds. The
private cloud was composed of four VMs, each of
which was an m1.medium instance with two virtual
CPUs (VCPUs) and 8 GB of RAM. Amazon cloud
as a public cloud provider had a t2.large VM with
two VCPUs and 8 GB of RAM. The other public
cloud resource, which was provisioned was from
Google cloud which included an n1-standard-2
instance with two VCPUs and 7.5 GB RAM. Nectar
instances were located in Melbourne, Australia. The
Amazon instance was in Sydney, Australia, and the
Google cloud was in Changhua County, Taiwan.
One VM instance in the private cloud was
running the RVIMS while the others were used to
deploy a sample application. The sample application
for this evaluation was a simple two-tier web server.
The first tier consisted of a load balancer running on
a private VM instance, used to balance the load
related to incoming http requests. The second tier
was composed of back-end web servers running VM
instances in different clouds.
A number of configuration parameters in the
experiments were used to cause deliberate failures.
This allowed us to observe the proposed system
reactions in the presence of different kinds of
failures. One configuration parameter was used to
shut down a back-end server running on a VM
instance. Another parameter slowed down the
processing procedures of http requests in a back-end
server by adding a sleep statement. Another
configuration parameter increased the load on a VM
instance by causing CPU utilization to exceed the
threshold specified in the user request for VMs. The
final configuration parameter acted to decrease the
load on a VM instance.
User requests for cloud resources consisted of a
number of VMs needed to run a cloud application.
In our experiment, we limit the user request to a
maximum of 3 VMs where one VM runs as a load
balancer while the others run as back-end web
servers. In all tests, all resources were provisioned
Recovery-Oriented Resource Management in Hybrid Cloud Environments
233
initially from the private cloud. When a failure was
injected, there were three ways of handling it (see
Table 2). The first is the private cloud solution,
which handles failures in the private cloud only. The
second is through the hybrid cloud (using the public
cloud Amazon) for handling failures in the Amazon
cloud. The third is through the cloud (using the
public cloud Google), which handles failures in
Google public cloud. In the second and the third
recovery solutions, we assume the private cloud is
overloaded.
Table 2: Types of failure recovery solutions.
Recovery Solution Description
Private cloud Only
(Nectar)
Failures resolved in the
private cloud only.
Hybrid cloud
(Nectar & Amazon)
Failures resolved in
Amazon cloud.
Hybrid cloud
(Nectar & Google)
Failures resolved in
Google cloud.
6.2 Test Scenarios: Results and
Discussion
Each test in the experiment involved the user request
(described in the previous section) in the hybrid
cloud environment. A configuration parameter was
used to deliberately cause failures. We immediately
began to measure TTR of RVIMS. We included a
test scenario for each failure in the failure models
except for the full private VM capacity failure—this
exception was made because we were interested here
in the failures that occurred during the run time of
our user request. Five tests were conducted for each
recovery solution.
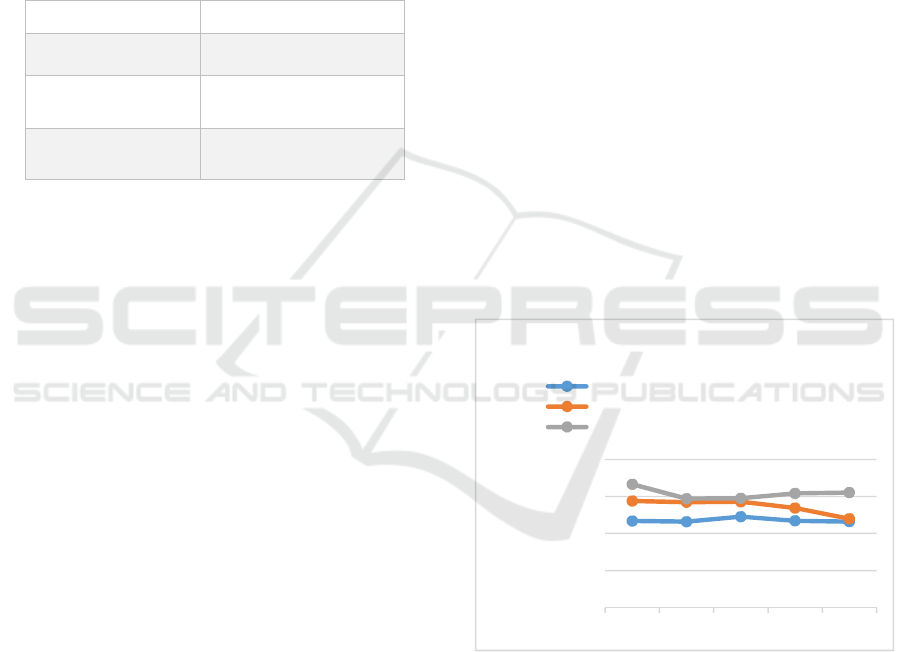
6.2.1 VM Crash and Outage Failures Test
Scenario
The VM crash failure and outage failure are similar.
The impact of each failure is the only difference.
The impact of an outage failure is complete service
unavailability (downtime) while the effect of a VM
crash failure is decreased QoS. As a result, we used
the same test scenario for both. A recovery
mechanism was used to launch new VMs. In the
private cloud solution, the new VM was launched on
the private cloud (Nectar), while in the hybrid cloud
solution, it was launched on a public cloud. As
shown in Figure 5, the results indicate that the
private cloud had the lowest TTR, which means it
was the fastest to recover from failures. The worst
case showed that the TTR difference between the
private cloud and the hybrid cloud (Google) ranged
from 10-20 seconds. This may be an issue for
critical applications. The Amazon hybrid cloud
solution showed better TTRs than the Google hybrid
cloud solution. However, in the case of cloud outage
failure, there was no recovery at all in the private
cloud solution. Also, when the private cloud was
overloaded, the TTRs increased and became
undermined.
6.2.2 VM Slowdown Failure Test Scenario
The VM slowdown failure can be triggered by using
the VM slow down configuration parameter through
adding a sleep statement. The results showed that
TTRs in the private cloud solution were better than
those of the hybrid cloud solutions (see Figure 6). In
one case, a TTR for the Amazon hybrid cloud
solution was the same as that for the private cloud
solution. In another case, a TTR for the Amazon
hybrid cloud solution was the worst (i.e. Test 2).
Notice that TTRs in the private cloud solution were
more stable than those of the other solutions.
Additionally, the Google hybrid cloud solution was
more stable than the Amazon one. Test 1 of the
private cloud and the two other hybrid recovery
solutions showed similar TTRs.
Figure 5: Time to recover from VM crash failure.
0
20
40
60
80
Test 1Test 2Test 3Test 4Test 5
Time To
Recover
TTR
(secs)
Time to Recover from VM Crash Failure
Private Cloud Only (Nectar)
Hybrid Cloud ( Nectar & Amazon)
Hybrid Cloud (Nectar & Google)
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
234
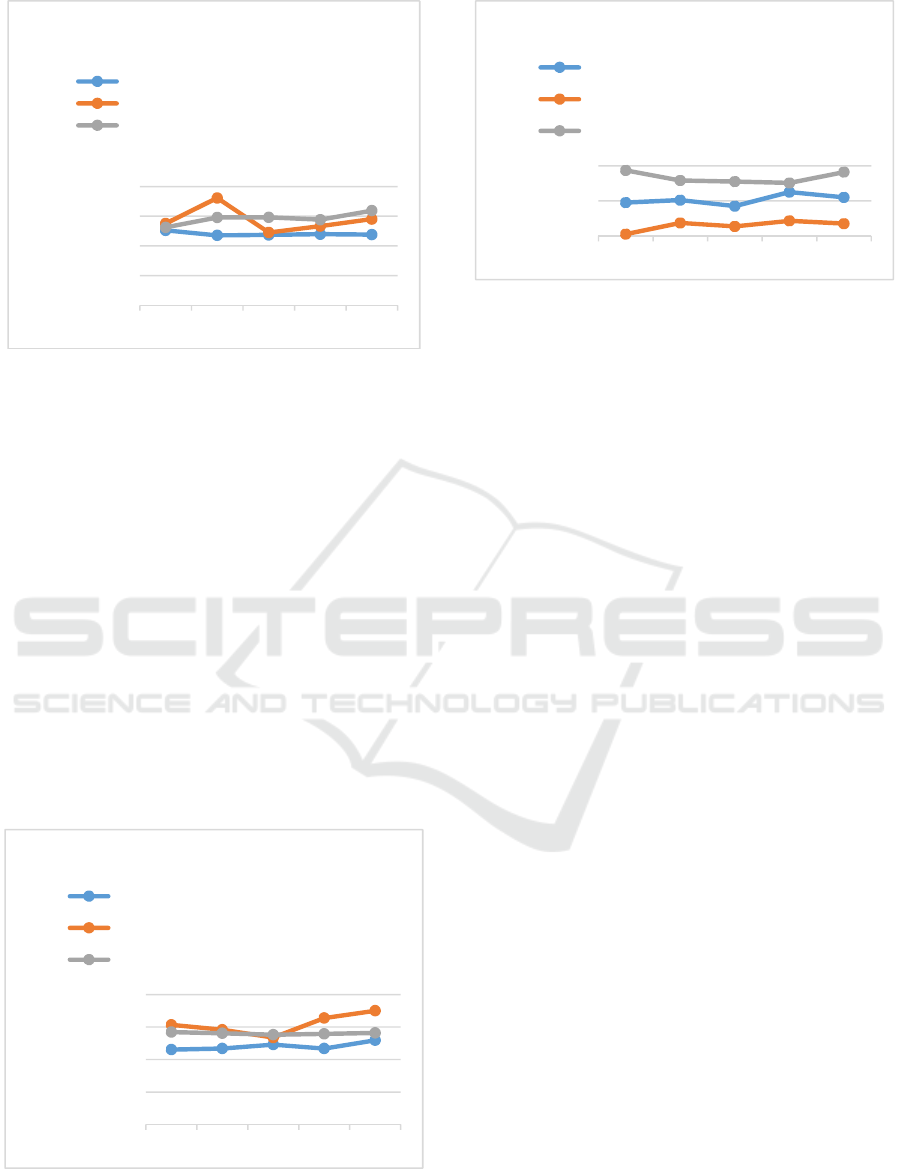
Figure 6: Time to recover from VM slowdown failure.
6.2.3 VM High Load Failure Test Scenario
When the requests on the application increase, the
CPU and memory utilization subsequently increase.
In our tests, the VM load increase configuration
parameter was used to increase the CPU and
memory utilization. This caused a VM high load
failure to occur. The failure recovery mechanism
here was to scale the cloud application by adding
new VMs. As shown in Figure 7, the values of TTRs
for the private cloud solution were the smallest of all
of the tests. In terms of hybrid cloud solutions, the
Google hybrid cloud solution showed shorter TTRs
than Amazon. In addition, the Google hybrid cloud
solution was more stable than Amazon. TTRs for the
Google hybrid cloud solution were around 56
seconds while the average TTRs for the private
cloud solution were of the order of 47 seconds.
Figure 7: Time to recover from VM high load failure.
Figure 8: Time to recover from VM low load failure.
6.2.4 VM Low Load Failure Test Scenario
The VM low load failure is almost the opposite of
the VM high load failure. Here, the application load
decreases and thus the CPU and memory utilization
are reduced. To avoid resources being underutilized,
the cloud management systems need to scale down
the applications immediately by terminating idle
VMs. A VM load decrease configuration parameter
can deliberately cause this kind of failure. Moreover,
though this failure has no impact on the cloud
application itself, it affects the resource utilization of
the overall cloud platform. The results depicted in
Figure 8 show that the Amazon hybrid cloud
solution performed better with this kind of failure
than the other recovery solutions. The average TTR
for the Amazon hybrid cloud solution was about 0.3
seconds. The TTR values for the Google hybrid
cloud solution were the highest. Overall, the TTRs
for all solutions were small compared to other TTR
failures.
7 CONCLUSIONS AND FUTURE
WORK
We have presented a fault tolerant approach for
efficiently managing cloud resources, improving
reliability and availability and minimizing human
intervention in hybrid cloud environments. The
methodology behind this approach leverages ideas
from recovery-oriented computing (ROC)
approaches. A key assumption of the ROC approach
is that failures will (eventually) occur. Instead of
attempting to solely rely on predicting failures and
attempting to avoid them completely, one should
also focus on attempting to recover quickly from
them. Thus, the intermediate goal of applying ROC
0
20
40
60
80
Test 1 Test 2 Test 3 Test 4 Test 5
Time to
Recover
(TTR)
(secs)
Time to Recover from VM Slowdown
Failure
Private Cloud Only (Nectar)
Hybrid Cloud ( Nectar & Amazon)
Hybrid Cloud (Nectar & Google)
0
20
40
60
80
Test 1 Test 2 Test 3 Test 4 Test 5
Time to
Recover
(TTR)
(seconds)
Time to Recover from VM Highload Failure
Private Cloud Only (Nectar)
Hybrid Cloud ( Nectar & Amazon)
Hybrid Cloud (Nectar & Google)
0
1
2
Test 1 Test 2 Test 3 Test 4 Test 5
Time to
Recover
(TTR)
(secs)
Time to Recover from VM Lowload Failure
Private Cloud Only (Nectar)
Hybrid Cloud ( Nectar & Amazon)
Hybrid Cloud (Nectar & Google)
Recovery-Oriented Resource Management in Hybrid Cloud Environments
235

in our research was to reduce the recovery time after
failures to meet QoS demands.
Our fault tolerant approach supports a range of
failure models and a feedback control system model
that leverages hybrid cloud services for autoscaling,
resilience and load distribution. The RVIMS realizes
the proposed models and heterogeneous cloud
services. This fault tolerant system can overcome
many scalability issues found in single cloud
models.
In our research, we have taken into account
awareness of failures and local resources when
deciding upon resource provisioning. However,
considering only those factors leaves a number of
challenges unmet in achieving optimal resource use.
Further studies are needed to determine how other
factors influence the effectiveness of hybrid clouds.
Furthermore most resource provisioning
algorithms suffer when dealing with big data
including data transfer, limitations of network
bandwidths and the topology awareness of clouds. It
is imperative that such issues are addressed in order
to make hybrid clouds more reliable and efficient.
This is one focus of our future work.
Furthermore, augmenting our work with further
(richer) models of fault tolerance and failure
prediction is also an area of future consideration.
Thus whilst ROC can help certain classes of
application to recover, partial failures for long
running applications can have unique requirements
that need to be considered also.
Finally the challenge of bursting to the public
cloud can often have implications on what
applications and data can be recovered to external
resources, e.g. due to privacy considerations of
outsourcing. We shall also consider such demands as
part of a more holistic approach to where and how
RVIMS can be optimally applied.
ACKNOWLEDGEMENTS
The authors would like to express thanks to the
Nectar Research Cloud (www.nectar.org.au) for the
cloud resources used to perform this research.
REFERENCES
Amazon. 2016. Amazon Elastic Compute Cloud [Online].
Available: http://aws.amazon.com/ec2 [Accessed 22-
09-2016].
Armbrust, M., Fox, A., Griffith, R., Joseph, A. D., Katz,
R. H., Konwinski, A., Lee, G., Patterson, D. A.,
Rabkin, A., Stoica, I. & Zaharia, M. 2009. Above the
Clouds: A Berkeley View of Cloud Computing. EECS
Department, University of California, Berkeley.
Berkeley. 2004. Recovery-Oriented Computing Overview
[Online]. Available:
http://roc.cs.berkeley.edu/roc_overview.html
[Accessed 03-11-2016].
Cascella, R. G., Morin, C., Harsh, P. & Jegou, Y. 2012.
Contrail: a reliable and trustworthy cloud platform.
Proceedings of the 1st European Workshop on
Dependable Cloud Computing. Sibiu, Romania: ACM.
El-Refaey, M. 2011. Virtual Machines Provisioning and
Migration Services. Cloud Computing. John Wiley &
Sons, Inc.
Eucalyptus. 2008. Eucalyptus Cloud Platform [Online].
Available: www.eucalyptus.com [Accessed 25-09-
2016].
Google. 2010. Google. Post-mortem for February 24th,
2010 outage [Online]. Available:
https://groups.google.com/forum/#!topic/google-
appengine/p2QKJ0OSLc8 [Accessed 02-10-2016].
Google. 2016. Google Compute Engine [Online].
Available: https://cloud.google.com/compute
[Accessed 04-07-2016].
Grozev, N. & Buyya, R. 2014. Inter-Cloud architectures
and application brokering: taxonomy and survey.
Software: Practice and Experience, 44, 369-390.
Javadi, B., Abawajy, J. & Sinnott, R. O. 2012. Hybrid
Cloud resource provisioning policy in the presence of
resource failures. Cloud Computing Technology and
Science (CloudCom), 2012 IEEE 4th International
Conference on, 10-17.
Laing, B. 2012. Summary of Windows Azure Service
Disruption on Feb 29th, 2012 [Online]. Available:
https://azure.microsoft.com/en-us/blog/summary-of-
windows-azure-service-disruption-on-feb-29th-2012
[Accessed 07-07-2016].
Libcloud. 2009. Apach Libcloud [Online]. Available:
http://libcloud.apache.org [Accessed 05-09-2016].
Mattess, M., Calheiros, R. N. & Buyya, R. Scaling
MapReduce Applications Across Hybrid Clouds to
Meet Soft Deadlines. Advanced Information
Networking and Applications (AINA), 2013 IEEE
27th International Conference on, 25-28 March 2013
2013. 629-636.
Microsoft. 2014a. An Introduction to designing reliable
cloud services [Online]. Trustworthy Computing.
Available: https://www.microsoft.com/en-
us/twc/reliability.aspx [Accessed 08-01-2017].
Microsoft. 2014b. Resilience by design for cloud services
[Online]. Trustwothy Computing. Available:
https://www.microsoft.com/en-us/twc/reliability.aspx
[Accessed 02-01-2017].
Nectar. 2016. The Australian National eResearch
Collaboration Tools and Resources (Nectar) Research
Cloud [Online]. Available: http://cloud.nectar.org.au
[Accessed 13-10-2016].
NIST. 2011. The NIST Definition of Cloud Computing
[Online]. Available: http://csrc.nist.gov/publications/
PubsSPs.html [Accessed 9-10-2016].
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
236

OpenNebula. 2016. OpenNebula Cloud Platform [Online].
Available: http://opennebula.org [Accessed 13-11-
2016].
OpenStack. 2010. OpenStack Cloud Platform [Online].
Available: https://www.openstack.org [Accessed 10-
10-2016].
RightScale. 2006. RightScale - A Cloud Management
Solution [Online]. Available:
http://www.rightscale.com [Accessed 25-10-2016].
Sotomayor, B., Montero, R. S., Llorente, I. M. & Foster, I.
2009. Virtual Infrastructure Management in Private
and Hybrid Clouds. IEEE Internet Computing, 13, 14-
22.
Tanenbaum, A. S. & Steen, M. v. 2006. Distributed
Systems: Principles and Paradigms (2nd Edition),
Prentice-Hall, Inc.
Voorsluys, W., Broberg, J. & Buyya, R. 2011.
Introduction to Cloud Computing. Cloud Computing.
John Wiley & Sons, Inc.
Yixin, D., Hellerstein, J. L., Parekh, S., Griffith, R.,
Kaiser, G. E. & Phung, D. 2005. A control theory
foundation for self-managing computing systems.
Selected Areas in Communications, IEEE Journal on,
23, 2213-2222.
Recovery-Oriented Resource Management in Hybrid Cloud Environments
237
