
Digital Assisted Communication
Paula Escudeiro
1,2
, Nuno Escudeiro
1,3
, Marcelo Norberto
1,2
, Jorge Lopes
1,2
and Fernando Soares
1,2
1
Departamento de Engenharia informática - Instituto Superior de Engenharia do Porto, Porto, Portugal
2
GILT – Games, Interaction and Learning Technologies, Porto, Portugal
3
INESC TEC - Laboratory of Artificial Intelligence and Decision Support, Porto, Portugal
Keywords: Sign Language, Blind, Deaf, Kinect, Sensor Gloves, Translator.
Abstract: The communication with the deaf community can prove to be very challenging without the use of sign
language. There is a considerable difference between sign and written language as they differ in both syntax
and semantics. The work described in this paper addresses the development of a bidirectional translator
between several sign languages and their respective text, as well as the evaluation methods and results of
those tools. A multiplayer game is using the translator is also described on this paper. The translator from sign
language to text employs two devices, namely the Microsoft Kinect and 5DT Sensor Gloves in order to gather
data about the motion and shape of the hands. This translator is being adapted to allow the communication
with the blind as well. The Quantitative Evaluation Framework (QEF) and the ten-fold cross-validation
methods were used to evaluate the project and show promising results. Also, the product goes through a
validation process by sign language experts and deaf users who provide their feedback answering a
questionnaire. The translator exhibits a precision higher than 90% and the projects overall quality rates are
close to 90% based on the QEF.
1 INTRODUCTION
Promoting equal opportunities and social inclusion of
people with disabilities is one of the main concerns of
the modern society and also a key topic in the agenda
of the European Higher Education.
The emergence of new technologies combined
with the commitment and dedication of many
teachers, researchers and the deaf community is
allowing the creation of tools to improve the social
inclusion and simplify the communication between
hearing impaired people and the rest.
Despite all the efforts there are still a lot of
improvements to be done for this matter. For
example, in the public services, it is not unusual for a
deaf citizen to need assistance to communicate with
an employee. In such circumstances it can be quite
complex to establish communication. Another critical
area is education. Deaf children have significant
difficulties in reading due to difficulties in
understanding the meaning of the vocabulary and the
sentences. This fact together with the lack of
communication via sign language in schools severely
compromises the development of linguistic,
emotional and social skills in deaf students.
The VirtualSign project intends to reduce the
linguistic barriers between the deaf community and
those not suffering from hearing disabilities.
The project aims to improve the accessibility in
terms of communication for people with disabilities
in speech, hearing and also the blind. ACE also
encourages and supports the learning of sign
language.
The sign language, like any other living language,
is constantly evolving and becoming effectively a
contact language with listeners, increasingly being
seen as a language of instruction and learning in
different areas, a playful language in times of leisure,
and professional language in several areas of work
(Morgado and
Martins, 2009).
2 LINGUISTIC ASPECTS
The sign language involves a set of components that
make it a rich and hard to decode communication
channel. Although it is not as formal and not as
structured as written text it contains a far more
complex way of expression. When performing sign
language, we must take account of a series of
Escudeiro, P., Escudeiro, N., Norberto, M., Lopes, J. and Soares, F.
Digital Assisted Communication.
DOI: 10.5220/0006377903950402
In Proceedings of the 13th International Conference on Web Information Systems and Technologies (WEBIST 2017), pages 395-402
ISBN: 978-989-758-246-2
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
395

parameters that define the manual and non-manual
components. The manual component includes:
Configuration of the hand. In Portuguese sign
language there is a total of 57 identified hand
configurations.
Orientation of the palm of the hand. Some pairs
of configurations differ only in the palm’s
orientation.
Location of articulation (gestural space).
Movement of the hands.
The non-manual component comprises:
Body movement. The body movement is
responsible for introducing a temporal context.
Facial expressions. The facial expressions add
a sense of emotion to the speech.
3 RELATED WORK
In the last two decades a significant number of works
focusing on the development of techniques to
automate the translation of sign languages with
greater incidence for the American Sign Language
(Morrissey and Way, 2005), and the introduction of
serious games in the education of people with speech
and/or hearing disabilities (
Gameiro et al., 2014) have
been published.
Several of the methods proposed to perform
representation and recognition of sign language
gestures, apply some of the main state-of-the-art
techniques, involving segmentation, tracking and
feature extraction as well as the use of specific
hardware as depth sensors and data gloves.
The collected data is classified by applying a
random forests algorithm (Biau, 2012), yielding an
average accuracy rate of 49,5%.
Cooper et al. (
Cooper et al., 2011) use linguistic
concepts in order to identify the constituent features
of the gesture, describing the motion, location and
shape of the hand. These elements are combined
using HMM for gesture recognition. The recognition
rates of the gestures are in the order of 71,4%.
The project CopyCat (
Brashear et al., 2010) is an
interactive adventure and educational game with ASL
recognition. Colorful gloves equipped with
accelerometers are used in order to simplify the
segmentation of the hands and allow the estimation of
motion acceleration, direction and the rotation of the
hands. The data is classified using HMM, yielding an
accuracy of 85%.
ProDeaf is an application that does the translation
of Portuguese text or voice to Brazilian sign language
(ProDeaf, 2016). This project is very similar to one of
the main components used on the VirtualSign game,
which is the text to gesture translation. The objective
of ProDeaf is to make the communication between
mute and deaf people easier by making digital content
accessible in Brazilian sign language. The translation
is done using a 3D avatar that performs the gestures.
ProDeaf already has over 130 000 users.
Showleap is a recent Spanish Sign language
translator (Showleap, 2016), it claims to translate sign
language to voice and voice into sign language. So far
Showleap uses the Leap motion which is a piece of
hardware capable of detecting hands through the use
of two monochromatic IR cameras and three infrared
LEDs and showleap uses also the Myo armband . This
armband is capable of detecting the arm motion,
rotation and some hand gestures through
electromyographic sensors that detect electrical
signals from the muscles of the arm. So far Showleap
has no precise results on the translation and the
creators claim that the product is 90% done
(Showleap, 2015).
Motionsavvy Uni is another sign language
translator that makes use of the leapmotion
(Motionsavvy, 2016). This translator converts
gestures into text and voice and voice into text. Text
and voice are not converted into sign language with
Uni. The translator has been designed to be built into
a tablet. Uni claims to have 2000 signs on launch and
allows users to create their own signs.
Two university students at Washington University
won the Lemelson-MIT Student Prize by creating a
prototype of a glove that can translate sign language
into speech or text (University of Washington, 2016).
The gloves have sensors in both the hands and the
wrist from where the information of the hand
movement and rotation is retrieved. There is no clear
results yet as the project is a recent prototype.
4 VirtualSign TRANSLATOR
VirtualSign aims to contribute to a greater social
inclusion for the deaf through the creation of a bi-
direction translator between sign language and text.
In addition a serious game was also developed in
order to assist in the process of learning sign
language.
The project bundles three interlinked modules:
Translator of Sign Language to Text:
module responsible for the capture,
interpretation and translation of sign language
gestures to text. A pair of sensors gloves (5DT
Data Gloves) provides input about the
configuration of the hands while the Microsoft
WEBIST 2017 - 13th International Conference on Web Information Systems and Technologies
396

Kinect provides information about the
orientation and movement of the hands. The
Figure 1 shows its interface.
Figure 1: Sign to text translator interface.
Translator of Text to Sign Language: (Figure
2): This module is responsible for the
translation of text to sign language. The
gestures are performed by an avatar based on a
defined set of parameters that are created using
the VirtualSign Studio (VSS). The VSS
provides an interface to the users to create all
the gestures and that information is stored on
the VirtualSign server and is reused for the
translations.
Figure 2: Text to sign translator interface.
Serious Game: Module responsible for the
didactic aspects which integrates the two
modules above described into a serious game.
The system architecture as a whole has two
main components. The main component is the
game client that includes the game module and
the VirtualSign translator. Then there is the
Web Server component that hosts all the web
services needed for the game. Those web
services have access to the server database
where the players’ information is kept. The
game clients communicate with each other
using Unity network commands and with the
web server through HTTP requests.
5 SIGN LANGUAGE TO TEXT
The translation process between gesture and text is
done by combining the data received through the
Kinect and the data received from the 5DT gloves.
To simplify, we consider that a word corresponds
to a gesture in sign language.
A gesture comprises a sequence of configurations
from the dominant hand, each associated with
(possibly) a configuration of the support hand, and a
motion and orientation of both hands. Each element
of the sequence is defined as an atom of the gesture.
The beginning of a gesture is marked by the adoption
of a configuration by the dominant hand. In the case
of a configuration change, two scenarios may arise:
the newly identified configuration is an atom of the
sequence of the gesture in progress or the acquired
atom closes the sequence of the gesture in progress
and signals the beginning of a new gesture that will
start with the following atom.
5.1 Hand Configuration
When we speak of sign language, we must mention
that each Country, sometimes each Region, has its
own Sign Language. In Portuguese Sign
Language(PSL), there are a total of 57 hand
configurations, reduced to 42, since 15 pairs differ
only in the orientation, as is the case of the letters M
and W.
The configuration assumed by the hand is
identified through classification – a machine learning
setting by which one (eventually more) category from
a set of pre-defined categories is assigned to a given
object. A classification model is learned from a set of
labelled samples. Then, this model is used to classify
in real time new samples as they are acquired.
5.1.1 Hand Configuration Inputs
In order to obtain the necessary information to
identify the configuration of each hand, 5DT data
gloves (5DT, 2011) are used. Each glove has 14
sensors, placed in specific places of the joints of the
hand and it is possible to obtain data at a rate of 100
samples per second.
To increase robustness in reading data and reduce
the weight of that noise, a set of sensor data is only
maintained (for further classification) if that data is
stable for a pre-defined period of time, after having
detected a significant change.
Digital Assisted Communication
397

5.1.2 Classification
The classification is made from labelled samples, and
then the program classifies the new samples in real
time. After the sample is obtained the data is passed
thought the classification.
To improve the result of this classification
process, the 42 hand configurations were divided into
different groups. The differential factor between each
group was the fingers with greater relevance for this
group of configurations.
As seen in Figure 3, in group 3, the configurations
similar to the hand-opening gesture were grouped. On
the other hand, in Figure 4, we see that in group 2, the
configurations related to the thumb raising.
Figure 3: Group 3 - Open hand related configurations.
Figure 4: Group 2 - Thumb raising hand configurations.
Three individuals, named A, B and C performed
the tests. Each with a dataset with 10 samples for each
existing configuration, with a total of 1260 samples.
This samples were then crossed with datasets, using 2
of the individuals as training and the remainder as
test, using a k-nearest neighbors (KNN) classifier
(Zhang et al., 2006).To reduce the variance of our
estimates we have used 10-fold cross validation.
In the following tables we see the results of the
tests performed.
Table 1: Correct prediction rate in the group classifier test.
A point to take into consideration is the fact that
intermediate (fake) configurations that constitute
only noise may occur during the transition between
two distinct configurations.
As example we can see in Figure 5 the transition
from the configuration corresponding to the letter "S"
to the configuration corresponding to the letter "B",
where we obtain as noise an intermediate
configuration associated that matches the hand
configuration for number "5" in PSL.
Figure 5: Transition from configuration S to configuration
B, through the intermediate configuration (noise) 5.
Intermediate configurations differ from the others
by the time component, i.e., intermediate
configurations have a shorter steady time, which is a
constant feature that may be used to distinguish
between a valid configuration and a noisy,
intermediate configurations. Thus, we use
information about the dwell time of each
configuration as an element of discrimination by
setting a minimum execution (steady) time below
which configurations are considered invalid.
5.2 Hand Motion and Orientation
To obtain information that allows characterizing the
movement and orientation of the hands we use the
Microsoft Kinect.
The skeleton feature allows tracking up to four
people at the same time, with the extraction of
characteristics from 20 skeletal points in a human
body, at a maximum rate of 30 frames per second.
Of the 20 points available only 6 are used, in
particular the points corresponding to the hands,
elbows, hip and head.
The information about the motion is only saved
when a significant movement happens, i.e. when the
difference between the position of the dominant hand
(or both hands), and the last stored position is greater
than a predefined threshold.
Therefore, when a significant movement is
detected we save an 8-dimensional vector
corresponding to the normalized coordinates of each
hand (x
n
, y
n
, z
n
) and the angle that characterizes its
orientation. If the gesture is performed just with the
dominant hand, the coordinates and angle of the
support hand assume the value zero. The coordinates
are normalized by performing a subtraction of the
vector that represents the hand position (x
m
, y
m
, z
m
)
by the vector that defines the central hip position (x
a
,
y
a
, z
a
).
,
,
,
,
,
,
To be capable of getting the orientation made, the
WEBIST 2017 - 13th International Conference on Web Information Systems and Technologies
398
angular coefficient is defined to a straight line of the
intersection of the hand and the elbow.
In summary, for each configuration assumed by
the dominant hand, a set of vectors characterizing the
motion (position and orientation) of the hands are
recorded.
5.3 Evaluation
The main focus in performance is in the capacity of
the model to predict correctly the words being
represented through sign language.
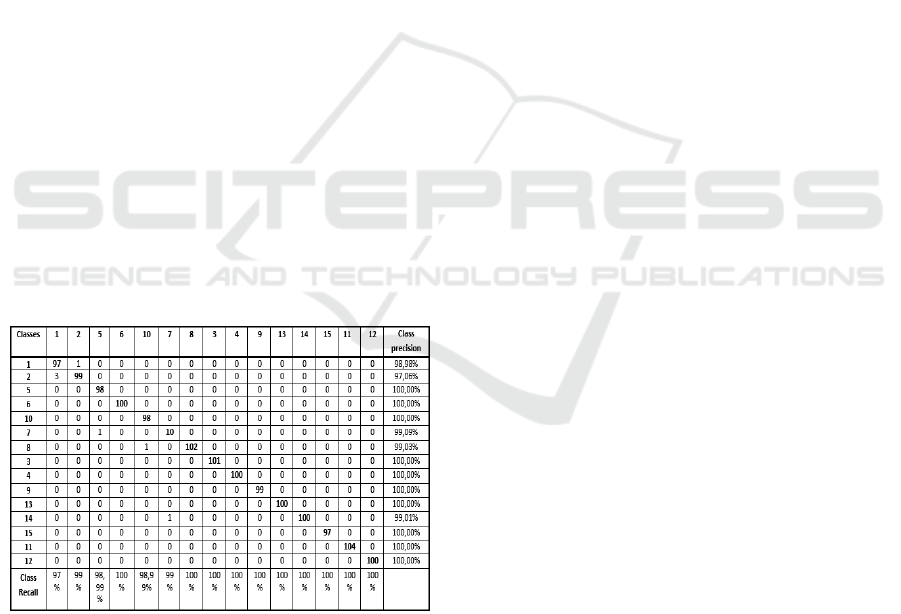
This evaluation counts with 15 words, these 15
words have 2260 samples, but only 750 samples were
used to train the SVM (Steinwart and Christmann,
2008). Each one of the 15 words has 50 examples, the
same number was used for all of them to ensure a
uniform distribution of the classes.
This gestures have been obtained by different
users. The recall is a measure to select all the
instances of a particular class and the precision is the
percentage of correct predictions to a particular class.
The classes (words) used are “Olá”(1), “Adeus”(2),
“Sorrir”(3), “Segredo”(4), “Floresta”(5), “Sol”(6),
“Flor”(7), “Aluno”(8), “Escola”(9), “Casa”(10),
“Aulas”(11), “Desenho”(12), “Amigo”(13),
“Pais”(14) and “Desporto”(15).
The confusion matrix shown in Table 2 clearly
shows the effectiveness of the classifier that achieves
an average precision above 99% for this test scenario.
Table 2: Confusion Matrix.
6 TEXT TO SIGN LANGUAGE
The translation of any text to sign language is a quite
demanding task due to the specific linguistic aspects.
Such as any other language, the sign language has
its own grammatical aspects that must be taken into
consideration. Those details are taken into
consideration in the VSS.
A server based syntax and semantics analyser is
being developed to improve the accuracy of the
translation. Deaf people usually have a hard time
reading and writing their language. The avatar used
for the translations was created with Autodesk Maya
as well as its hand animations.
The Figure 2 shows the avatar body that has
identical properties to a human one in order to get the
best accuracy possible performing the gestures.
Other aspects were taken into consideration, such
as the background that must create a contrast with the
avatar. That contrast is needed so all the gestures and
the movements can be easily understood by the deaf.
6.1 Structure
The text to sign language translator module is divided
in several parts. In order to improve the distribution
and efficiency of all the project components their
interconnections were carefully planned.
The connection to the Kinect and data gloves is
based on sockets. This protocol was also used for the
PowerPoint Add-in, the text from the powerpoint will
be sent to the translator, thus the avatar will translate
all the text to sign language. The Add-in will send
each word on the slide, highlighting it and waiting for
the reply in order to continue so that the user knows
what is being translated at the time.
The database contains all the parameters and the
corresponding text. During the translation process the
application will search the database for the word that
came as input. When the text is found in the database
the parameters containing the data required for the
avatar to translate will be sent to the application. If
there is no match in the database, the avatar will then
translate the word letter by letter.
6.1.1 Architecture
The Figure 6 shows the two main modules, which
carry out the steps needed in the translation process:
The first module (text recognition) converts the
written text into signals, which is represented by an
animated character.
The second module translates the gestures of sign
language into text. In this process we used two
devices: The Kinect for motion recognition and the
gloves for the recognition of static hand
configurations.
Digital Assisted Communication
399
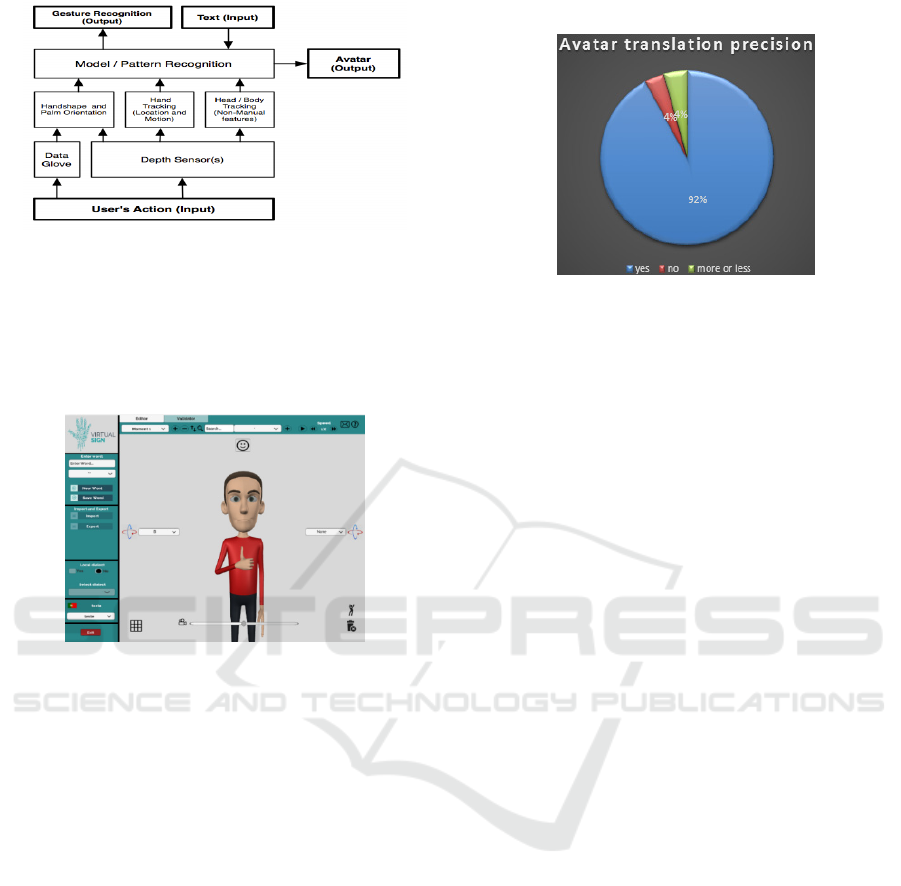
Figure 6: Translator architecture.
6.2 VirtualSign Studio
The VSS is the tool where users can create the
gestures for each word. VSS main interface is
represented on Figure 7.
Figure 7: VirtualSign Studio interface.
In order to use this application the user only needs
to put the user and the password to login. There are
two types of users, editors and validators.
The editor is capable of creating words to be
introduced in the data-base. To create the words the
editor has access to all the linguistic aspects
represented by the avatar. There is also a possibility
to import a word already made.
The validator has the possibility of validating
words, the validator imports words that need to be
validated and can then use the preview system to see
if the word is correct, if the word is correct then the
validator only needs to click in the validate button and
after that moment this word starts to be used to
translate the texts.
The validator can also set a word in a review state
where the editor can fix it.
6.3 Text to Sign Results
Anonymous questionnaires were made to obtain
information about the quality of translation of the
translation between gesture to text and text to gesture.
The text to gesture already has a large database with
arround 600 words.
Figure 8: Text to sign results.
The Figure 8 presents the results obtained about
the precision of the 600 gestures that have been
analyzed by four specialists of PSL. The range of ages
of the specialist that have answered these
questionnaires went from 39 to 64 years old.
7 SERIOUS GAME
The digital games provide a remarkable opportunity
to overcome the lack of educational digital content
available for the hearing impaired community.
Playing a game as the name suggest has a great leisure
aspect that can’t be found in conventional educational
means. Educational game researcher James Gee (Gee,
2003) shows how good game designers manage to get
new players to learn their long, complex, and difficult
games.
Two games were created for the project.
A single player game where the player controls a
character that interacts with various objects and non-
player characters with the aim of collecting several
gestures from the Portuguese Sign Language
(Escudeiro, 2014).
The first game is played in first person view in
which the player controls a character on the map.
Each map represents a level and each level has several
objects that represent signs scattered through the map
for the player to interact with.
The second game created is a multiplayer game.
The game consists of a first person puzzle game and
requires two players to cooperate in order to get
through the game.
7.1 Game Concept
VirtualSign games aim to be an educational and
social integration tool to improve the user’s sign
language skills and allow them to communicate with
WEBIST 2017 - 13th International Conference on Web Information Systems and Technologies
400

others using those skills.
The game is a first person puzzle game, where the
puzzles are based on simple form objects such as
cubes and spheres. The Player will be motivated into
solving the puzzles using the surrounding
environment. The objects can be moved by the user
and there is also intractable objects such as buttons
and switches. However, some of those objects are
only accessible to one of the players, thus, creating
the need to cooperate with each other in order to finish
each level.
After the players complete the level, the time they
took to complete will be registered on an in game
worldwide ranking table with others players times to
incite competition. There is also a personal score that
each player achieves so there is competition between
the two players as well.
The communication between the players is shown
as gestures in real time but there will be also a text
chat where the previous messages can be accessed.
The Figure 9 shows the input application and the
avatar translating after receiving a message.
Figure 9: VirtualSign Cooperation game interface during
gameplay.
7.2 Game Results
Ten testers (8 male and 2 female) aged between 23
and 65 tested the game and answered surveys.
However, due to the need of using the VS translator
only 5 of those testers were able to try that feature and
answer one of the questions. The link with the form
and instructions was given to the testers. The forms
were answered anonymously. The survey of the beta
test phase had 20 questions of which the last one was
an optional written answer about possible
improvements to the game.
The questions graded the game between 1 and 5
with 1 being the worst and 5 being the best. The final
average was 4.5 out of 5 at the end of the testing
phase.
8 VISUAL IMPAIRED
INCLUSION
Besides the social inclusion of the deaf with the
VirtualSign translator, the ACE project also aims to
reach visually impaired people. With the use of voice
as input and output for the translator ACE aims to
provide the means for a deaf person to talk with a
blind one and vice-versa.
So far there is a game under development ACE for
the blind, which gives the player feedback trough
sound. The voice features are also being integrated in
VirtualSign in order to achieve ACE final goal.
9 CONCLUSIONS
The VirtualSign system is prepared to work with
several distinct sign languages making it possible to
have deaf people from different countries
understanding each other.
The machine learning techniques used to process
the inputs from Kinect and the 5dt Gloves are able to
identify the signs being represented with high
accuracy.
VirtualSign can be applied in places with public
attendance to facilitate the communication among
deaf and non-deaf people. It is naturally accepted that
having assistance to understand sign language in
places like fire departments, police stations,
restaurants, museums and airports, among many
others, will be of clear added value in the promotion
of equal opportunities and social inclusion of the deaf
and hearing impaired.
The VirtualSign translator was tested by several
users. The estimated accuracy of the conversion from
gestures to text reaches values of 97%.
For future work on the translator gesture to text a
system with the same precision and accuracy without
using gloves is being planned.
Also an intermediate system of semantics
between sign language and the written text is being
created. The semantic and syntax are very important
because the translation between the languages is not
direct.
There is also the blind voice recognition and
synthetization that is being developed as mentioned
before and there is a game for the blind under
development. We also aim to create a way for both
deaf and blind to create digital arts through an
application using all the progress made so far.
Digital Assisted Communication
401

ACKNOWLEDGEMENTS
This work was supported by FCT - ACE - Assisted
Communication for Education (ref: PTDC/IVC-
COM/5869/2014) and European Union- Erasmus + I-
ACE International Assisted Communication for
Education 2016-1-PT01-KA201-022812.
REFERENCES
Morgado, M., Martins, M., 2009. Língua Gestual
Portuguesa. Comunicar através de gestos que falam é o
nosso desafio, neste 25. º número da Diversidades,
rumo à descoberta de circuns-tâncias propiciadoras
nas quais todos se tornem protagonistas e
interlocutores de um diálogo universal., 7.
Morrissey, S., Way, A., 2005. An example-based approach
to translating sign language.
Gameiro, J., Cardoso, T., Rybarczyk, Y., 2014. Kinect-
Sign, Teaching sign language to “listeners” through a
game. Procedia Technology, 17, 384-391.
Biau, G., 2012. Analysis of a random forests
model. Journal of Machine Learning
Research, 13(Apr), 1063-1095.
Cooper, H., Pugeault, N., & Bowden, R., 2011. Reading the
signs: A video based sign dictionary. In Computer
Vision Workshops (ICCV Workshops), 2011 IEEE
International Conference on (pp. 914-919). IEEE.
Steinwart, I., & Christmann, A., 2008. Support vector
machines. Springer Science & Business Media.
Brashear, H., Zafrulla, Z., Starner, T., Hamilton, H., Presti,
P., & Lee, S., 2010. CopyCat: A Corpus for Verifying
American Sign Language During Game Play by Deaf
Children. In 4th Workshop on the Representation and
Processing of Sign Languages: Corpora and Sign
Language Technologies.
ProDeaf, 2016. Solutions. [Online] Available at:
http://www.prodeaf.net/en-us/Solucoes [Accessed
December 2016].
Showleap, 2015. Showleap blog. [Online] Available at:
http://blog.showleap.com/2015/12/2016-nuestro-ano/
[Accessed December 2016]. 79.
Showleap, 2016. Showleap. [Online] Available at:
http://www.showleap.com/ [December July 2016].
Motionsavvy, 2016. Motionsavvy Uni. [Online] Available
at: http://www.motionsavvy.com/ [Accessed December
2016].
University of Washington, 2016. UW undergraduate team
wins $10,000 Lemelson-MIT Student Prize for gloves
that translate sign language. [Online] Available at:
http://www.washington.edu/news/2016/04/12/uw-
undergraduate-team-wins-10000-lemelson-mit-
student-prize-for-gloves-that-translate-sign-language/
[Accessed December 2016].
Gloves, 5DT., 2011. Fifth dimension technologies. [Online]
Available at: http://www.5dt.com/?page_id=34.
Zhang, H., Berg, A. C., Maire, M., & Malik, J., 2006. SVM-
KNN: Discriminative nearest neighbor classification
for visual category recognition. In Computer Vision
and Pattern Recognition, 2006 IEEE Computer Society
Conference on (Vol. 2, pp. 2126-2136).
IEEE.
Gee, J. P., 2003. What video games have to teach us about
learning and literacy. Computers in Entertainment
(CIE), 1(1), 20-20.
Escudeiro, P., Escudeiro, N., Reis, R., Barbosa, M.,
Bidarra, J., Baltasar, A. B., ... & Norberto, M. (2014).
Virtual sign game learning sign language. In A.
Zaharim, & K. Sopian (Eds.), Computers and
Technology in Modern Education, ser. Proceedings of
the 5th International Conference on Education and
Educational technologies, Malaysia.
WEBIST 2017 - 13th International Conference on Web Information Systems and Technologies
402
