
Estimating the Survival Rate of Mutants
Imen Marsit
1
, Mohamed Nazih Omri
1
and Ali Mili
2
1
MARS Laboratory, University of Sousse, Tunisia
2
New Jersey Institute of Technology, Newark, NJ, U.S.A.
Keywords:
Mutation Testing, Mutant Survival Rate, Semantic Metrics.
Abstract:
Mutation testing is often used to assess the quality of a test suite by analyzing its ability to distinguish between
a base program and its mutants. The main threat to the validity/ reliability of this assessment approach is that
many mutants may be syntactically distinct from the base, yet functionally equivalent to it. The problem of
identifying equivalent mutants and excluding them from consideration is the focus of much recent research.
In this paper we argue that it is not necessary to identify individual equivalent mutants and count them; rather
it is sufficient to estimate their number. To do so, we consider the question: what makes a program prone
to produce equivalent mutants? Our answer is: redundancy does. Consequently, we introduce a number of
program metrics that capture various dimensions of redundancy in a program, and show empirically that they
are statistically linked to the rate of equivalent mutants.
1 EQUIVALENT MUTANTS
Mutation testing is typically used to assess the effec-
tiveness of test suites, by analyzing to what extent a
test suite T can distinguish between a base program
P and a set of mutants thereof, say P
1
, P
2
, ... P
N
(Debroy and Wong, 2010; Debroy and Wong, 2013;
V. and W.E., 2010; Ma et al., 2005; Zem
´
ın et al.,
2015). A recurring source of aggravation in mutation
testing is the presence of equivalent mutants: some
mutants may be syntactically distinct from the base
program, yet be functionally indistinguishable from
it (i.e. compute the same function). Equivalent mu-
tants distort the analysis of the test suite’s effective-
ness, because when a test suite fails to distinguish a
mutant P
i
from the base program P, we do not know
whether this is because P
i
is equivalent to P, or be-
cause T is not sufficiently effective at detecting faults.
Ideally, we want to quantify the effectiveness of a
test suite T , not by the ratio of the mutants it dis-
tinguishes over the total number of mutants (N), but
rather by the ratio of the mutants it distinguishes over
the number of non-equivalent (distinguishable) mu-
tants. Many researchers (Aadamopoulos et al., 2004;
Papadakis et al., 2014; Schuler and Zeller, 2010; Just
et al., 2013; Nica and Wotawa, 2012) have addressed
this problem by proposing means to identify (and ex-
clude from consideration) mutants that are equivalent
to the base program.
In this paper, we propose an alternative approach,
which does not seek to identify which mutants are
equivalent to the base, but merely to estimate their
number. To do so, we consider the research question
(RQ3) raised by Yao et al (Yao et al., 2014): What
are the causes of mutant equivalence? Our answer:
Redundancy in the program. Consequently, we de-
fine a number of software metrics that capture various
forms of redundancy, discuss why we believe they are
prone to produce equivalent mutants, then run an ex-
periment that appears to bear out conjecture out. This
is work in progress; we are fairly confident that our
analytical arguments are sound, and we are encour-
aged by the preliminary empirical results.
Following common usage, we say that a mutant
has been killed by a test data set T if and only if exe-
cution of the mutant on T exhibits a distinct behavior
from the original program P; consequently, when a
mutant goes through test data T and shows the same
behavior as P, we say that it has survived the test.
Also, we use the term survival rate of a program P
to designate the ratio (or percentage) of mutants of P
that are found to survive the execution of test data T .
For the purpose of our study, we use the seman-
tic metrics introduced in (Mili et al., 2014), which we
briefly review in section 2. In section 3 we discuss
why we feel that the semantic metrics introduced in
section 2 are good indicators of the number of poten-
tially equivalent mutants that a program P may yield.
208
Marsit, I., Omri, M. and Mili, A.
Estimating the Survival Rate of Mutants.
DOI: 10.5220/0006392802080213
In Proceedings of the 12th International Conference on Software Technologies (ICSOFT 2017), pages 208-213
ISBN: 978-989-758-262-2
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

In sections 4 and 5 we present the details of our
empirical study by discussing in turn the experimen-
tal set up we have put together, then the preliminary
results we have found. Finally in section 6 we assess
our prelimnary findings and sketch directions of fur-
ther research.
2 SEMANTIC METRICS
Whereas traditional software metrics usually capture
properties of the source code of a program, semantic
software metrics reflect functional properties of pro-
grams and specifications, regardless of how these pro-
grams and specifications are represented (Mili et al.,
2014; Morell and Voas, 1993; Voas and Miller, 1993;
Gall et al., 2008; Etzkorn and Gholston, 2002). We
consider four semantic metrics, due to (Mili et al.,
2014), and we discuss in the next section why we be-
lieve that these metrics may give us some indication
on the survival rate of the mutants of a program. To
discuss these metrics, we consider a program P on
space S, where S is defined by the variable declara-
tions that appear in program P; elements of S are de-
noted by lower case s, and are referred to as states of
the program; by abuse of notation, we use the same
symbol (P) to denote the program as well as the func-
tion that the program defines from its initial states to
its final states. We also consider a specification R in
the form of a binary relation on S, which represents
the (initial state, final state) pairs that are considered
correct by R. All the metrics we discuss are based
on the entropy function, with which we assume the
reader to be familiar (Csiszar and Koerner, 2011).
2.1 State Redundancy
It is very common for programs to have a state space
that is much larger than the range of values that it
takes in any execution. Examples abound: we declare
an integer variable (2
32
values) to represent a boolean
variable (2 values); we declare an integer variable
(2
32
values) to represent the age of a person in years
(120 values, to be optimistic); we declare three integer
variables (2
96
≈ 10
29
values) to represent the current
year, birth year, and current age of a person (about 10
4
values if we consider that one of the three variables is
redundant, and take 120 for maximum age and 100 for
longevity of the application). The state redundancy of
a program is the difference between the entropy of the
declared state and the entropy of the actual state; be-
cause the entropy of the actual state may change (de-
crease) during the execution of the program, we dis-
tinguish between the initial state redundancy and the
final state redundancy. If we let S, σ
I
and σ
F
be (re-
spectively) the random variable that ranges over the
declared space, the initial actual space and the final
actual space, then we define:
• Initial state redundancy: κ
I
(P) = H(S) − H(σ
I
).
• Final state redundancy: κ
F
(P) = H(S) − H(σ
F
).
2.2 Functional Redundancy
In the fault tolerant computing literature, it is common
to see references to modular redundancy, whereby
the same function is computed by different modules
and their results compared to detect failures (for dou-
ble modular redundancy) and recover from them (for
triple modular redundancy, or higher). But we do not
need deliberate, pre-planned, dependability-driven
measures to have functional redundancy; we consider
that we observe functional redundancy whenever a
function produces more information than is strictly
necessary to represent its result. If we let Y be the
random variable that represents the range of the pro-
gram’s function, then the functional redundancy of
program P is denoted by φ and defined by:
φ(P) =
H(S) − H(Y )
H(Y )
.
For double modular redundancy, this formula yields
φ(P) = 1 and for triple modular redundancy it yields
φ(P) = 2; but it takes arbitrary (not necessarily inte-
ger) non-negative values.
2.3 Non-injectivity
The injectivity of a function is the property of the
function to change its image as its argument changes;
the non-injectivity of a function is the property of
the function to map several distinct arguments onto
the same image. Programs are usually vastly non-
injective: a routine that sorts an array of size N maps
(N!) distinct arrays (corresponding to (N!) distinct
permutations of an array of N distinct cells) into a
single (sorted) permutation. We consider program P
and we let X be the random variable that represents
the domain of P. A natural way to quantify the non-
injectivity of function P is to consider the conditional
entropy of X given P(X); in other words, if we know
what P(X ) is, how much uncertainty do we have about
X. If P is injective then the conditional entropy is
zero, since P(X) uniquely determines X ; but if P is
not injective then the conditional entropy reflects the
number of antecedents that Y = P(X) may have; in the
case of the sorting routine, for example, if we look
at the output of the routine in the form of a sorted
array, then we know that the input could be any (of
Estimating the Survival Rate of Mutants
209

the (N!)) permutations of this array. Hence we define
non-injectivity as: θ(P) = H(X |P(X)).
2.4 Non Determinacy
A specification is non-deterministic if and only if it
assigns multiple final states to a given initial state; let
S be the space defined by three variables, say x, y and
z, and let R be a specification of the form
R
0
= {(s, s
0
)|x
0
= f
x
(s) ∧ y
0
= f
y
(s) ∧ z
0
= f
z
(s)},
where s stands for the aggregate hx, y, zi and f
x
(), f
y
(),
f
z
() are three functions that can be evaluated for any
s in S. Then R
0
is deterministic since for each s it
assigns a single s
0
. The following three specifications
are increasingly non-deterministic, since they restrict
final states less and less, hence allow more and more
final states.
R
1
= {(s, s
0
)|x
0
= f
x
(s) ∧ y
0
= f
y
(s)},
R
2
= {(s, s
0
)|x
0
= f
x
(s)},
R
3
= {(s, s
0
)|true }.
If we let X be a random variable that takes its values
in the domain of R, and let R(X) be the set of images
of X by R, then we define the non-determinacy of R
as the conditional entropy of R(X) given X , i.e. how
much uncertainty we have about the image of X if we
know X: χ(R) = H(R(X)|X ).
3 ANALYTICAL STUDY
The question that we address here is: what reason
do we have to believe that the semantic metrics we
have discussed in the previous section have any rela-
tion with the survival rate of mutants of a program?
3.1 State Redundancy
State redundancy reflects to what extent the aggregate
of program variables carry more bits than necessary
to represent the actual program state; the increase in
state redundancy yields an increase in the volume of
bits that have no effect on the execution of the pro-
gram. Hence with an increase in state redundancy, we
may expect an increase in the likelihood that the ex-
ecution of a mutant will affect irrelevant parts of the
state, hence will yield equivalent behavior.
3.2 Functional Redundancy
To the extent that added functional redundancy is
equated with greater tolerance to faults, it is normal
to expect that a program that has greater functional
redundancy is better able to recover from deviations
caused by a mutated statement. Even in the absence
of deliberate fault tolerance measures, increased func-
tional redundancy means increased likelihood that the
final state is determined by non-affected functional in-
formation.
3.3 Non-injectivity
The non-injectivity of a program reflects the breadth
of distinct initial (or intermediate) states that map to
the same final state. The higher the non-injectivity
of a program, the greater the likelihood that a state
generated by a base program and a state generated by
a mutant are mapped to the same final state.
3.4 Non Determinacy
Let S be the space defined by three integer variables
x, y and z, and let R and R
0
be the following specifica-
tions on S:
R = {(s, s
0
)|x
0
= y ∧ y
0
= x}.
R
0
= {(s, s
0
)|x
0
= y ∧ y
0
= x ∧ z
0
= x}.
Let P (base) and M (mutant) be the following pro-
grams on space S:
p: {z=x; x=y; y=z;}
m: {z=y; y=x; x=z;}
Whether M is found to be equivalent to P or not de-
pends on which oracle we use to test M: If we use
specification R (which focuses on x and y) then we
find it to be equivalent, and if we use R
0
we find it to
be distinct. Specification R differs from R
0
in its de-
gree of non-determinacy:
χ(R) = 32 bits,
χ(R
0
) = 0 bits.
As the non-determinacy of a specification increases
the determination of equivalence weakens, and more
programs are considered equivalent.
4 EMPIRICAL STUDY
4.1 Computing Survival Rates
In order to validate our conjecture that the seman-
tic metrics are correlated to the survival rate of a
program’s mutants, we consider a number of pro-
grams, compute their semantic metrics, then we de-
ploy mutant generators to produce a set of mutants
for each program, and check how many mutants sur-
vive the test in each case. To this effect, we con-
sider a sample of thirteen (13) programs from the
Common Math Library, a library of open source Java
ICSOFT 2017 - 12th International Conference on Software Technologies
210

projects, along with their corresponding JUnit auto-
mated unit test data sets. For each class in the li-
brary, say Myclass.java, corresponds a test class
MyclassTest.java, which contains a number of test
cases TestMethod() for each method of the class.
In order to generate mutants, we use the Pitest tool
(Coles, 2017), which integrates smoothly with JU-
nit; we use Maven (Inozemtseva and Holmes, 2014)
to build and run tests. First, we specify to Pitest
which class to mutate, along with the corresponding
test class; upon deployment, it generates mutants ac-
cording to the specified parameters and runs the se-
lected test suite on each one of them. Then it pro-
duces a report that shows: the line of code it mutates
for each mutant; the total number of mutants; and the
number of killed and live mutants. Because we have
no control over the test oracle (this is handled auto-
matically by the test environment) we do not include
non-determinacy in our current study.
4.2 Computing Semantic Metrics
Given a random variable X that ranges over a set of
values {x
1
, x
2
, ...x
N
}, the entropy of X is defined with
respect to a probability distribution, say π(), which
assigns a probability of occurrence π(x
i
) to each value
of X. The formula of the entropy is:
H(X) = −
∑
N
i=1
π(x
i
)log(π(x
i
)),
and is given in bits. When the probability distribution
π() is uniform, we have π(x
i
) =
1
N
for all i, which
yields H(X) = log(N). For a random variable X that
takes values of a 32-bit integer, N equals 2
32
and
log(N) is then merely equal to 32 bits. For the sake of
simplicity, we assume uniform probability through-
out, so that the entropy of any program variable is
basically the number of bits in that variable. As for
computing conditional entropies, we use the defini-
tion H(X |Y ) = H(X, Y ) − H(Y ), and the property that
if Y is a function of X then H(X, Y ) = H(X), so that
the conditional entropy in these cases is H(X|Y ) =
H(X) − H(Y ).
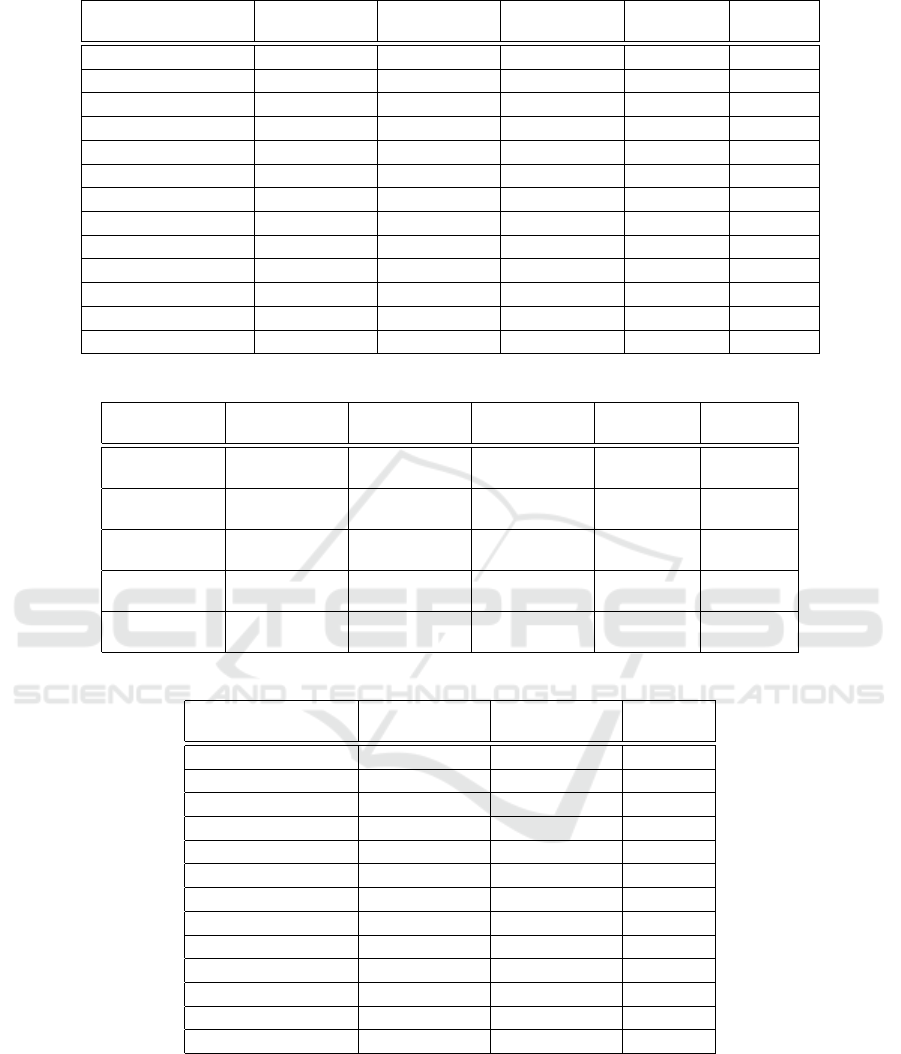
4.3 Raw Data
The raw data stemming from our experiment is given
in table 1. Columns 1 to 4 are filled using the data
collected in section 4.1 and the last column is filled
using the methods described in section 4.2.
5 STATISTICAL OBSERVATIONS
5.1 Correlations
Table 2 shows the correlation between the five factors
of table 1; of greatest interest to us is the correlation
between the survival rate and the semantic metrics.
As shown in the rightmost column of table 2 these
correlations are very high, ranging from 0.728 for ini-
tial state redundancy to 0.764 for final state redun-
dancy to 0.802 for functional redundancy to 0.921 for
non-injectivity; this bears out our conjectures.
5.2 Regression
We run a linear regression on this data, using the sur-
vival rate as a dependent variable and the semantic
metrics as the independent variables, and we find the
following equation:
SR = 2.417 + 0.012 × SR
i
+ 0.001 × SR
f
+0.116 × FR + 0.172 × NI,
where SR, SR
i
, SR
f
, FR and NI represent, respec-
tively, the survival rate, the initial state redundancy,
the final state redundancy, the functional redundancy
and the non-injectivity. As far as regression statistics,
we find 0.881 for R
2
and 0.821 for adjusted R
2
. Table
3 shows the comparison between the estimated values
and the actual values of the survival rates (as percent-
ages), along with the residuals. We find the average
of residuals to be -0.132 and the standard devitaion to
be 0.516; except for some outliers,most residuals are
within 20%, and many are well within 10%.
6 ASSESSMENT AND
PROSPECTS
Mutation testing is commonly used as a means to as-
sess the effectiveness of a test data set: Given a pro-
gram P and a test data set T , if we generate N mu-
tants of P and run them on data T and find that they
all exhibit a different behavior from P, we can con-
clude that T is very effective at detecting faults in P.
But if test data T can only distinguish, say 60% of the
mutants from P, we have no way to tell whether it is
because T is ineffective or because 40% of the gen-
erated mutants are equivalent to P.In order to distin-
guish between these two situations, we need to know
how many mutants of P are distinguishable from P,
and assess the effectiveness of T with respect to this
number, rather than with respect to N.
While most other approaches address the prob-
lem of equivalent mutants by trying to character-
ize/identify equivalent mutants and counting them,
Estimating the Survival Rate of Mutants
211
Function
Initial State
Redundancy
Final State
Redundancy
Functional
Redundancy
Non-
Injectivity
Survival
Rate
Vector1D 229.44 293.44 11.04 128.00 33.33
subandcheck 50.72 114.72 8.63 64.00 16.67
addandcheck 50.72 32.00 2.40 64.00 33.33
multiplyentry 681.68 685.00 8.25 128.00 33.33
trigamma 55.36 57.36 8.63 64.00 20.83
distanceinf 688.32 792.12 19.80 192.00 50.00
pow 114.72 121.36 0.90 128.00 11.11
getreducedfraction 50.20 82.71 6.22 64.00 11.76
linearCombination 1092.00 1509.44 56.83 256.00 66.67
gamma 234.08 313.36 2.32 64.00 18.75
normalizeArray 702.00 812.88 15.90 0.00 6.25
addSub 101.72 447.80 13.84 64.00 16.67
fraction 545.00 609.00 1.58 64.00 28.12
Figure 1: Raw Data.
Initial State
Redundancy
Final State
Redundancy
Functional
Redundancy
Non-
Injectivity
Survival
Rate
Initial State
Redundancy 1 0.985752 0.722747 0.573626 0.727965
Final State
Redundancy 1 0.80808 0.621823 0.763944
Functional
Redundancy 1 0.704976 0.801607
Non-
Injectivity 1 0.92079
Survival
Rate 1
Figure 2: Correlation Table.
Function
Actual
Survival Rate
Estimated
Survival Rate
Relative
Residual
Vector1D 33.33 28.760 0.137
subandcheck 16.67 15.149 0.091
addandcheck 16.67 14.344 0.139
multiplyentry 33.33 34.255 -0.028
trigamma 20.83 15.148 0.273
distanceinf 50.00 46.789 0.064
pow 11.11 26.035 -1.343
getreducedfraction 11.76 14.831 -0.261
linearCombination 66.67 67.654 -0.015
gamma 18.75 16.816 0.103
normalizeArray 6.25 13.498 -1.159
addSub 16.67 16.353 0.019
fraction 28.12 20.757 0.262
Figure 3: Actuals, Estimates, and Residuals.
attempt to estimate how many equivalent mutants a
program is prone to produce; in other words, we do
not need to know which mutants are equivalent, all
we need to know is how many equivalent mutants we
think there are. Our approach proceeds by analyz-
ing several forms of redundancy within the program,
which can be quantified by a set of semantic metrics.
In this paper, we present the semantic metrics in ques-
tion, discuss why we believe that they are related to
the survival rate of mutants of a program, then show
ICSOFT 2017 - 12th International Conference on Software Technologies
212

empirical evidence to support our conjecture, and pro-
vide an approximate formula that estimates the sur-
vival rate of a program as a function of its semantic
metrics. We envision the following extensions to our
work:
• Because the dependent variable is normalized (a
percentage), we argue that the independent vari-
ables ought to be normalized as well; hence we
envision to redo the statistical analysis using nor-
malized metrics (most can be normalized to the
entropy of the declared state of the program).
• Building a larger base of programs, involving
larger size programs.
• Validate the new regression formula on a realistic
set of programs, distinct from the programs with
which we build the predictive model.
• Automating the calculation of the semantic met-
rics, ideally by the generation of a compiler that
analyzes the source code of the program to com-
pute its semantic metrics.
• Consider the oracle that is used in identify-
ing equivalent mutants, and integrate the non-
determinacy of the oracle in the statistical model.
• Consider a possible standardization of the test
data we use to test mutants: currently, we are re-
lying on the test data provided by the Commons
Math Library. It is possible that some test classes
are more thorough than others; yet in order for our
statistical study to be meaningful, all test classes
need to be equally thorough; we need to define
standards across classes.
REFERENCES
Aadamopoulos, K., Harman, M., and Hierons, R. (2004).
How to overcome the equivalent mutant problem and
achieve tailored selective mutation using co-evolution.
In Proceedings, Genetic and Evolutionary Computa-
tion, volume 3103 of LNCS, pages 1338–1349.
Coles, H. (2017). Real world mutation testing. Technical
report, pitest.org.
Csiszar, I. and Koerner, J. (2011). Information Theory:
Coding Theorems for Discrete Memoryless Systems.
Cambridge University Press.
Debroy, V. and Wong, W. E. (2010). Using mutations to
automatically suggest fixes for faulty programs. In
Proceedings, ICST, pages 65–74.
Debroy, V. and Wong, W. E. (2013). Combining mutation
and fault localization for automated program debug-
ging. Journal of Systems and Software, 90:45–60.
Etzkorn, L. H. and Gholston, S. (2002). A semantic entropy
metric. Journal of Software Maintenance Evolution:
research and Practice, 14:293–310.
Gall, C. S., Lukins, S., Etzkorn, L., Gholston, L., Farring-
ton, P., Utley, D., Fortune, J., and Virani, S. (2008).
Semantic software metrics computed from natural lan-
guage design specifications. IET Software, 2(1).
Inozemtseva, L. and Holmes, R. (2014). Coverage is not
strongly correlated with test suite effectiveness. In
Procedings, 36th International Conference on Soft-
ware Engineering. ACM Press.
Just, R., Ernst, M. D., and Fraser, G. (2013). Using state
infection conditions to detect equivalent mutants and
sped up mutation analysis. In Proceedings, Dagstuhl
Seminar 13021: Symbolic Methods in Testing.
Ma, Y.-S., Offutt, J., and Kwon, Y.-R. (2005). Mujava : An
automated class mutation system. Journal of Software
Testing, Verification and Reliability, 15(2):97–133.
Mili, A., Jaoua, A., Frias, M., and Helali, R. G. (2014).
Semantic metrics for software products. Innovations
in Systems and Software Engineering, 10(3):203–217.
Morell, L. J. and Voas, J. M. (1993). A framework for defin-
ing semantic metrics. Journal of Systems and Soft-
ware, 20(3):245–251.
Nica, S. and Wotawa, F. (2012). Using constraints for equiv-
alent mutant detection. In Andres, C. and Llana, L.,
editors, Second Workshop on Formal methods in the
Development of Software, EPTCS, pages 1–8.
Papadakis, M., Delamaro, M., and LeTraon, Y. (2014).
Mitigating the effects of equivalent mutants with mu-
tant clasification strategies. Science of Computer Pro-
gramming, 95(P3):298–319.
Schuler, D. and Zeller, A. (2010). (un-)covering equiva-
lent mutants. In Proceedings, International Confer-
ence on Software Testing, Verification and Validation,
pages 45–54.
V., D. and W.E., W. (2010). Using mutation to automatically
suggest fixes to faulty programs. In Proceedings, ICST
2010, pages 65–74.
Voas, J. M. and Miller, K. (1993). Semantic metrics for
software testability. Journal of Systems and Software,
20(3):207–216.
Yao, X., Harman, M., and Jia, Y. (2014). A study of equiv-
alent and stubborn mutation operators using human
analysis of equivalence. In Proceedings, ICSE.
Zem
´
ın, L., Gutti
´
errez, S., de Rosso, S. P., Aguirre, N., Mili,
A., Jaoua, A., and Frias, M. (2015). Stryker: Scaling
specification-based program repair by pruning infeasi-
ble mutants with sat. Technical report, ITBA, Buenos
Aires, Argentina.
Estimating the Survival Rate of Mutants
213
