
Semi-supervised SVM with Fuzzy Controlled Cooperation of Biology
Related Algorithms
Shakhnaz Akhmedova, Eugene Semenkin and Vladimir Stanovov
Department of System Analysis and Operations Research, Reshetnev Siberian State University of Science and Technology,
“Krasnoyarskiy Rabochiy” avenue, 31, Krasnoyarsk, Russia
Keywords: Bio-inspired Algorithms, Fuzzy Controller, Support Vector Machines, Semi-Supervised Learning,
Classification, Constrained Optimization.
Abstract: Due to its wide applicability, the problem of semi-supervised classification is attracting increasing attention
in machine learning. Semi-Supervised Support Vector Machines (SVM) are based on applying the margin
maximization principle to both labelled and unlabelled examples. A new collective bionic algorithm,
namely fuzzy controlled cooperation of biology related algorithms (COBRA-f), which solves constrained
optimization problems, has been developed for semi-supervised SVM design. Firstly, the experimental
results obtained by the two types of fuzzy controlled COBRA are presented and compared and their
usefulness is demonstrated. Then the performance and behaviour of proposed semi-supervised SVMs are
studied under common experimental settings and their workability is established.
1 INTRODUCTION
One of the most important machine learning tasks is
classification that consists in identifying to which of
a set of categories a new instance belongs. If
sufficient labelled training data are given, there
exists a variety of techniques, for example, artificial
neural networks (Bishop, 1996), fuzzy logic
classifiers (Kuncheva, 2000) or Support Vector
Machines (SVM) (Vapnik and Chervonenkis, 1974),
to address such a task. However, labelled data are
often rare in real-world applications. Therefore,
recently semi-supervised learning has attracted
increasing attention among researchers (Zhu and
Goldberg, 2009).
In contrast to supervised methods, the latter class
of techniques takes both labelled and unlabelled data
into account to construct appropriate models. A
well-known concept in this field is semi-supervised
support vector machines (Bennett and Demiriz,
1999), which depict the direct extension of support
vector machines to semi-supervised learning
scenarios.
In this study semi-supervised SVMs generated
by a new collective bionic optimization algorithm,
namely fuzzy controlled cooperation of biology
related algorithms or COBRA-f, are described.
Initially, a meta-heuristic approach called Co-
Operation of Biology Related Algorithms or
COBRA (Akhmedova and Semenkin, 2013 (1)) was
developed for solving unconstrained real-parameter
optimization problems. Its basic idea consists in the
cooperative work of different nature-inspired
algorithms, which were chosen due to the similarity
of their schemes. However, there are still various
algorithms which can be used as components for
COBRA as well as previously conducted
experiments demonstrating that even the bionic
algorithms already chosen can be combined in
various ways.
Thus, to solve the described problem, in this
work COBRA was modified by implementing
controllers based on fuzzy logic (Lee, 1990). The
aim of this was to determine in an automated way
which bionic algorithm should be included in the co-
operative work. The proposed modification also
allows resources to be allocated properly while
solving unconstrained optimization problems. And
finally the obtained modification COBRA-f was
adopted for solving constrained optimization
problems.
Therefore, in this paper firstly a brief description
of the semi-supervised SVM is presented. Then the
COBRA meta-heuristic approach and the fuzzy
controller are described. In the next section, the
64
Akhmedova, S., Semenkin, E. and Stanovov, V.
Semi-supervised SVM with Fuzzy Controlled Cooperation of Biology Related Algorithms.
DOI: 10.5220/0006417400640071
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 64-71
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

experimental results obtained by two types of fuzzy
controller are discussed. And after that the
implementation of the best obtained fuzzy controlled
COBRA was applied for solving constrained
optimization problems as well as training the semi-
supervised SVM. For experiments several datasets
have been chosen, among which there are synthetic
and real datasets. In particular, we have used a
popular two moons problem, two datasets from the
UCI repository (namely Breast Cancer Wisconsin
(BCW) and Pima Indian Diabetes (PID)) with only
the 10 labels used available, and the gas turbine
dangerous vibrations detection problem. Finally,
some conclusions are given in the last section.
2 SEMI-SUPERVISED SUPPORT
VECTOR MACHINES
In Support Vector Machines (SVM), the intuition is
to try to create a separating hyperplane between the
instances from different classes (Vapnik and
Chervonenkis, 1974). SVM is based on the
maximization of the distance between the
discriminating hyperplane and the closest examples.
In other words since many choices could exist for
the separating hyperplane, in order to generalize
well on test data, the hyperplane with the largest
margin has to be found.
Suppose
()(){}
ll
yxyxL ,,...,,
11
= ,
m
i
Rx ∈
is a
training set with l examples (instances), each
instance
i
x has m attributes and is labelled as
i
y ,
where
li ,1= . Let v be a hyper-plane going through
the origin,
δ
be the margin and
δ
v
w =
. The margin
maximizing hyperplane can be formulated as a
constrained optimization problem in the following
manner:
min
2
1
2
→w
(1)
()
1≥⋅
ii
xwy
(2)
To solve the given optimization problem, the
proposed fuzzy controlled cooperation of biology
related algorithms or COBRA-f was used.
However, in this study semi-supervised SVMs
were considered. Thus, given the additional set
{}
ull
xxU
++
= ,...,
1
of unlabelled training patterns,
semi-supervised support vector machines aim at
finding an optimal prediction function for unseen
data based on both the labelled and the unlabelled
part of the data (Joachims, 1999). For unlabelled
data, it is assumed that the true label is the one
predicted by the model based on what side of the
hyperplane the unlabelled point ends up being.
In this study, self-training was used to learn from
the unlabelled data. Namely, the idea is to design the
model with labelled data and then use the model’s
own predictions as labels for the unlabelled data to
retrain a new model with the original labelled data
and the newly labelled data and then iteratively
repeat this process.
The problem with this method is that considering
its own predictions as true labels can cause the
model to drift away from the correct model if the
predictions were wrong initially. The model would
then continue to mislabel data and use it again and
continue to drift away from where it should be.
Therefore, to prevent this problem the technique
described in (Ravi, 2014) was used. More
specifically, the model’s predictions were used to
label the data only when there is a high confidence
about the predictions.
The notion of confidence used for the SVM
model is the distance from the found hyperplane.
The larger the distance from the hyperplane, the
higher the probability that the instance belongs to
the corresponding side of the separating hyperplane.
Consequently, the following basic steps were
performed:
Train SVM on the labelled set L by the
proposed meta-heuristic approach COBRA-f;
Use obtained SVM to classify all unlabelled
instances from U by checking the confidence
criteria from (Ravi, 2014);
Label instances from the set U if this is
possible;
Repeat from the first step.
Thus, the simplest semi-supervised learning
method was used for examining the workability of
COBRA-f.
3 CO-OPERATION OF BIOLOGY
RELATED ALGORITHMS
The meta-heuristic approach called Co-Operation of
Biology Related Algorithms or COBRA
(Akhmedova and Semenkin, 2013) was developed
based on five optimization methods, namely Particle
Swarm Optimization (PSO) (Kennedy and Eberhart,
1995), Wolf Pack Search (WPS) (Yang et al., 2007),
the Firefly Algorithm (FFA) (Yang, 2009), the
Cuckoo Search Algorithm (CSA) (Yang and Deb,
Semi-supervised SVM with Fuzzy Controlled Cooperation of Biology Related Algorithms
65

2009) and the Bat Algorithm (BA) (Yang, 2010)
(hereinafter referred to as “component-algorithms”).
Also, the Fish School Search (FSS) (Bastos and
Lima, 2009) was later added as COBRA’s
component-algorithm.
The main reason for the development of a
cooperative meta-heuristic was the inability to say
which of the above-listed algorithms is the best one
or which algorithm should be used for solving any
given optimization problem (Akhmedova and
Semenkin, 2013). Thus, the idea was to use the
cooperation of these bionic algorithms instead of any
attempts to understand which one is the best for the
problem in hand.
The originally proposed approach consists in
generating five populations, one population for each
bionic algorithm (or generating six populations with
the FSS algorithm added) which are then executed in
parallel, cooperating with each other. The COBRA
algorithm is a self-tuning meta-heuristic, so there is
no need to choose the population size for each
component-algorithm. The number of individuals in
the population of each algorithm can increase or
decrease depending on the fitness values: if the
overall fitness value was not improved during a
given number of iterations, then the size of each
population increased, and vice versa, if the fitness
value was constantly improved during a given
number of iterations, then the size of each
population decreased.
There is also one more rule for population size
adjustment, whereby a population can “grow” by
accepting individuals removed from other
populations. The population “grows” only if its
average fitness value is better than the average
fitness value of all other populations. Therefore, the
“winner algorithm” can be determined as an
algorithm whose population has the best average
fitness value. This can be done at every step. The
described competition among component-algorithms
allows the biggest population size to be allocated to
the most appropriate bionic algorithm on the current
generation.
The main goal of this communication between
all populations is to bring up-to-date information on
the best achievements to all component-algorithms
and prevent their preliminary convergence to their
own local optimum. “Communication” was deter-
mined in the following way: populations exchange
individuals in such a way that a part of the worst
individuals of each population is replaced by the
best individuals of other populations. Thus, the
group performance of all algorithms can be
improved.
The performance of the COBRA algorithm was
evaluated on a set of various benchmark problems
and the experiments showed that COBRA works
successfully and is reliable on different benchmarks
(Akhmedova and Semenkin, 2013). Besides, the
simulations showed that COBRA is superior to its
component-algorithms when the dimension grows or
when complicated problems are solved.
Then COBRA’s modification for solving
constrained optimization problems COBRA-c was
developed (Akhmedova and Semenkin, 2013 (2)).
Three constraint handling methods were used for
this purpose: dynamic penalties (Eiben and Smith,
2003), Deb’s rule (Deb, 2000) and the technique
described in (Liang, Shang and Li, 2010). The
method proposed in (Liang, Shang and Li, 2010)
was implemented in the PSO-component of
COBRA; at the same time other components were
modified by implementing Deb’s rule followed by
calculating function values using dynamic penalties.
The performance of this modification was
evaluated with a set of various test functions. It was
established that COBRA-c works successfully and is
sufficiently reliable. Finally, COBRA’s modification
outperforms all of its component-algorithms.
4 FUZZY CONTROLLER
The size control of the COBRA populations was
performed by the fuzzy controller, which received
algorithms’ success rates as inputs, and returned the
populations’ size modification values. Overall, there
were 7 input variables, i.e. one variable for each of
COBRA’s 6 component-algorithms, showing its
success rate, plus the overall success rate of all
components.
The success rate for all input variables except for
the last one was evaluated as the best fitness value of
its population. The last input variable was
determined as the ratio of the number of iterations,
during which the best-found fitness value was
improved, to the given number of iterations, which
was a constant period.
The number of outputs was equal to the number
of components.
The fuzzy rules had the following form:
R
q
: IF x
1
is A
q1
and … and x
n
is A
qn
THEN y
1
is
B
q1
and … y
k
is B
qk
(3)
where R
q
is the q-th fuzzy rule,
()
n
xxx ,...,
1
= are the
input values (components’ success rate) in n-
dimensional space (
7=n in this study),
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
66
()
k
yyy ,...,
1
= is the set of outputs ( 6=k ), A
qi
is the
fuzzy set for the i-th input variable, B
qj
is the fuzzy
set for the j-th output variable. The Mamdani-type
fuzzy inference with a centre of mass calculation
was used as the defuzzification method.
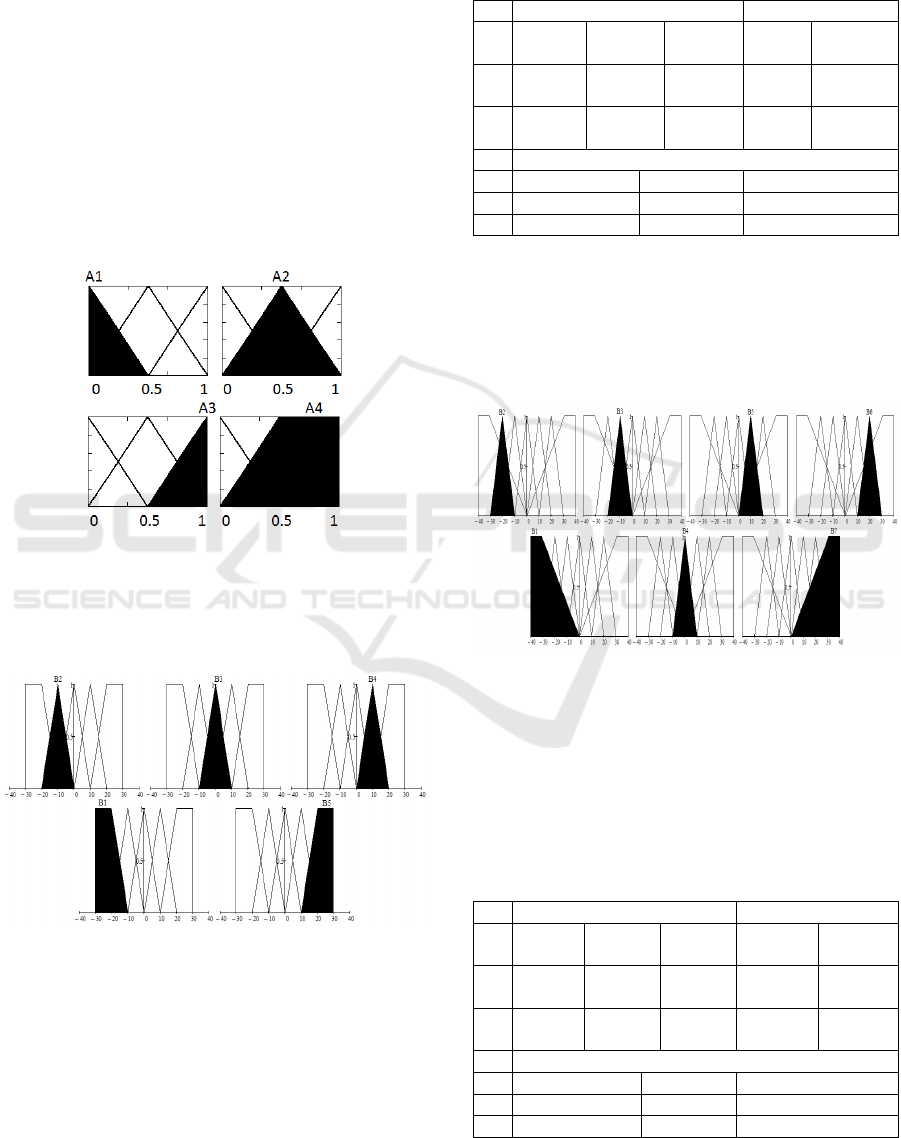
For the purposes of this study two variants of the
fuzzy controller, which differed in the number of
terms for output variables, have been implemented.
All inputs were values in the range
[]
1;0 , so that the
input fuzzy terms were equal for all variables. Also,
3 basis triangular fuzzy terms were used, and in
addition the A
4
term combining A
2
and A
3
, as well as
the “Don’t Care” condition (DC) have been included
to decrease the number of rules. The term shapes are
shown in Figure 1.
Figure 1: Fuzzy sets for inputs.
The first fuzzy controller’s 3 fuzzy terms, which
were used for the output, are demonstrated in Figure
2.
Figure 2: Fuzzy terms for all 6 outputs, first controller.
The adjustable parameters of the first fuzzy
controller are the values encoding positions of
output fuzzy terms, i.e. the position of central term
and side terms. For the example shown in Figure 2,
these values are -20, -10, 10 and 20, i.e. four values
were encoded, so that the terms may appear to be
non-symmetric after optimization.
A part of the rule base for the first controller is
presented in Table 1.
Table 1: Part of the first controller’s rule base.
№ IF THEN
1 X
1
is A
3
X
2
-X
6
is
A
4
X
7
is
DC
Y
1
is
B
5
Y
2
-Y
6
is
B
2
2 X
1
is A
2
X
2
-X
6
is
A
4
X
7
is
DC
Y
2
is
B
5
Y
2
-Y
6
is
B
2
3 X
1
is A
1
X
2
-X
6
is
A
4
X
7
is
DC
Y
3
is
B
5
Y
2
-Y
6
is
B
2
…
19 X
1
-X
6
is DC X
7
is A
1
Y
1
is B
1
20 X
1
-X
6
is DC X
7
is A
2
Y
1
is B
3
21 X
1
-X
6
is DC X
7
is A
3
Y
1
is B
5
The second controller had 7 terms for output
variables instead of 5. Two additional terms were
used for the last part of the rule base, which defined
the influence of the overall success rate, i.e. the 7-th
variable. The fuzzy terms for the second controller
are shown in Figure 3.
Figure 3: Fuzzy terms for all 6 outputs, second controller.
Terms 1 and 5 in the second controller have
different shapes, which allows the size control of
overall populations to be tuned more accurately.
The rule base is also different; it uses different
terms for the output. A part of the rule base is
presented in Table 2.
Table 2: Part of the second controller’s rule base.
№ IF THEN
1 X
1
is A
3
X
2
-X
6
is
A
4
X
7
is
DC
Y
1
is B
6
Y
2
-Y
6
is
B
3
2 X
1
is A
2
X
2
-X
6
is
A
4
X
7
is
DC
Y
2
is B
6
Y
2
-Y
6
is
B
3
3 X
1
is A
1
X
2
-X
6
is
A
4
X
7
is
DC
Y
3
is B
6
Y
2
-Y
6
is
B
3
…
19 X
1
-X
6
is DC X
7
is A
1
Y
1
is B
1
20 X
1
-X
6
is DC X
7
is A
2
Y
1
is B
4
21 X
1
-X
6
is DC X
7
is A
3
Y
1
is B
7
Semi-supervised SVM with Fuzzy Controlled Cooperation of Biology Related Algorithms
67
The second controller tends to be more flexible,
although it requires the tuning of 6 parameters
instead of 4 for the first one. For the case shown in
Figure 3 the parameter values are -30, -20, -10, 10,
20, 30, but terms may end up non-symmetric
afterwards.
5 EXPERIMENTAL RESULTS
In this section, the methodology employed in this
study to validate the proposed approach is presented.
The next sections describe the techniques used for
comparison purposes, the benchmark functions and
the statistical analysis.
5.1 Constrained Optimization
Problems
In this study 6 benchmark problems taken from
(Whitley, 1995) were used in experiments for
comparing the constrained optimization algorithms.
Optimal solutions for these problems are already
known, thus the algorithm’s reliability was estimated
by the achieved error value.
The given benchmark functions were considered
to evaluate the robustness of the fuzzy controlled
COBRA, which was modified for solving
constrained optimization problems in two ways:
By using dynamic penalties (Eiben and Smith,
2003);
By using Deb’s rule (Deb, 2000).
Consequently, firstly test problems were used to
determine the best parameters for the four types of
fuzzy controllers:
Controller with 4 parameters, constraint
handling technique is dynamic penalties;
Controller with 4 parameters, constraint
handling technique is Deb’s rule;
Controller with 6 parameters, constraint
handling technique is dynamic penalties;
Controller with 6 parameters, constraint
handling technique is Deb’s rule.
The standard Particle Swarm Optimization
algorithm was used for this purpose. Therefore, the
individuals were each represented as parameters of
the fuzzy controlled COBRA, namely the positions
of the output fuzzy terms. The following objective
function was optimized by the PSO algorithm:
() ()
=
==
6
11
,
1
6
1
i
T
t
t
i
xf
T
xF
(4)
where
10=T is the total number of program runs
for each benchmark problem listed earlier. Thus, on
each iteration all test problems were solved T times
by a given fuzzy controlled COBRA and then the
obtained results were averaged. Calculations were
stopped on each program run if the number of
function evaluations exceeded
D10000 . The
population size for the PSO algorithm was equal to
50 and the number of iterations was equal to 100;
calculations were stopped on the 100-th iteration for
the PSO heuristic.
Accordingly, the following parameters for the
fuzzy controllers were obtained:
[]
27;5;5;9 −− ;
[]
34;27;10;33 −−
;
[]
29;24;1;0;0;14− ;
[]
21;16;14;3;6;23 −−−
;
On the following step, the obtained parameters
were applied to the fuzzy controlled COBRA and it
was tested on the mentioned benchmark functions.
There were 51 program runs for each constrained
optimization problem, and calculations were stopped
if the number of function evaluations was equal to
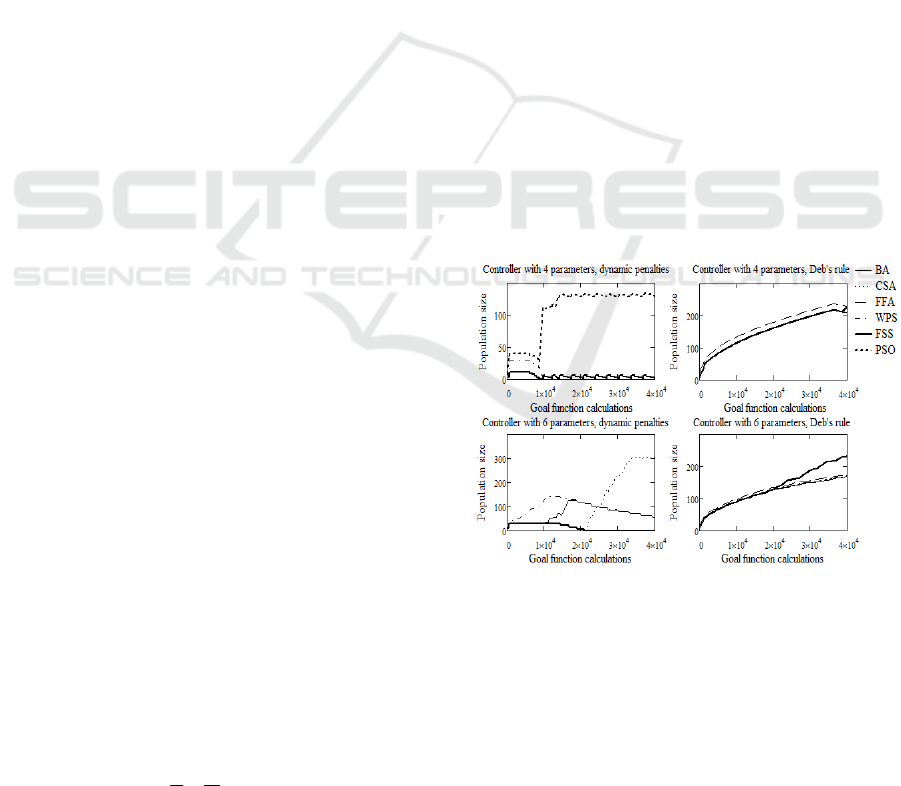
D10000 . Also, for example, a change in population
sizes was obtained while testing on the benchmark
problems. This change for the third problem is
presented in Figure 4.
Figure 4: Change in population sizes.
Based on the results received for other functions,
it was concluded that the algorithm with Deb’s rule
exhibits strange behaviour, i.e. it tends to increase
the size of all populations, while dynamic penalties
show more complicated cooperation. More
specifically, for the second fuzzy controller with 6
variables, for example, CSA is one of the worst
algorithms for the first 20000 calculations (it has
around 3 points available), but after 20000 it rapidly
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
68
increases its population size to 300 and more,
because it shows a much better ability to optimize
the function. At the same time, BA and WPS, who
were winners at the first phase, gradually decrease
their resource.
In Table 3 and Table 4 the results obtained by the
fuzzy controlled COBRA, the controller of which
has 4 parameters, are presented with the best
parameters. The following notations are used: the
best found function value (Best), the function value
averaged by the number of program runs (Mean) and
the standard deviation (STD).
Table 3: Results obtained by the fuzzy controlled COBRA
(4 parameters) with dynamic penalties.
Best Mean STD
1 0.000222883 0.000450223 0.000269495
2 4.44089e-016 1.20453e-006 5.73208e-006
3 0.0168729 0.0861003 0.106644
4 0.00246478 0.0270861 0.0240794
5 0.000349198 0.00205344 0.00184918
6 4.07214e-005 0.00012163 7.28906e-005
Table 4: Results obtained by the fuzzy controlled COBRA
(4 parameters) with Deb’s rule.
Best Mean STD
1 0.000194127 6.48378 12.6967
2 1.37668e-014
0.0508509 0.153545
3 0.241445 1.59201 1.35446
4 0.093186 6.36309 6.95277
5 0.0646682 5.93762 7.14939
6 0.00463816 3.50586 19.3554
Table 5: Results obtained by the fuzzy controlled COBRA
(6 parameters) with dynamic penalties.
Best Mean STD
1 0.000222799 0.0023863 0.00386538
2 4.44089e-016 5.45027e-006 1.14566e-005
3 0.0265527 0.249473 0.645633
4 0.0114249 0.0379335 0.0643213
5 0.000159134 0.0380605 0.125444
6 0.000236098 0.000955171 0.00178648
Table 6: Results obtained by the fuzzy controlled COBRA
(6 parameters) with Deb’s rule.
Best Mean STD
1 1.47682e-009 0.00234639 0.0054576
2 3.10862e-015 0.000577974 0.00155304
3 0.015536
0.055806 0.0984222
4 0.00559601 0.038134 0.113326
5 0.000160994 0.0656134 0.130952
6 6.15548e-006 0.000296266 0.000680345
In Table 5 and Table 6 the results obtained by the
fuzzy controlled COBRA, the controller of which
has 6 parameters, are presented with the best
parameters. The same notations as in the previous
tables are used.
For comparison, in Table 7 the results obtained
by COBRA-c with six component-algorithms with
the standard tuning method are given.
Table 7: Results obtained by COBRA-c with six
component algorithms.
Best Mean STD
1 2.54087e-005 0.00710629 0.0177543
2 2.08722e-014 0.000114461 5.15068e-005
3 6.39815e-005 0.0477759 0.0422946
4 0.0267919 0.0324922 0.00119963
5 0.000341288
0.0678906 0.0331402
6 1.21516e-005 0.000278707 0.000268217
Thus, the comparison demonstrates that the
fuzzy controlled COBRA with dynamic penalties
outperformed the same algorithms with Deb’s rule.
Aside from this, there is no significant difference
between the results obtained by the fuzzy controlled
COBRA with either 4 or 6 parameters. However, the
4-parameter fuzzy controlled COBRA with dynamic
penalties also outperformed the COBRA with six
components without a controller. Therefore, it can
be used for solving the optimization problems
instead of the given algorithm’s versions.
5.2 Classification Performance
Several artificial and real-world data sets described
in Table 8 were considered in this study, namely the
well-known two-dimensional “Moons” data set and
data sets for two medical diagnostic problems (Frank
Semi-supervised SVM with Fuzzy Controlled Cooperation of Biology Related Algorithms
69
and Asuncion, 2010). Each data set instance was
split into a labelled part and an unlabelled one, and
the different ratios for the particular settings were
used.
Table 8: Data sets considered in the experimental
evaluation, each consisting of n patterns having d features.
Data Set n d
Moons 200 2
Breast Cancer Wisconsin 699 9
Pima Indians Diabetes 768 8
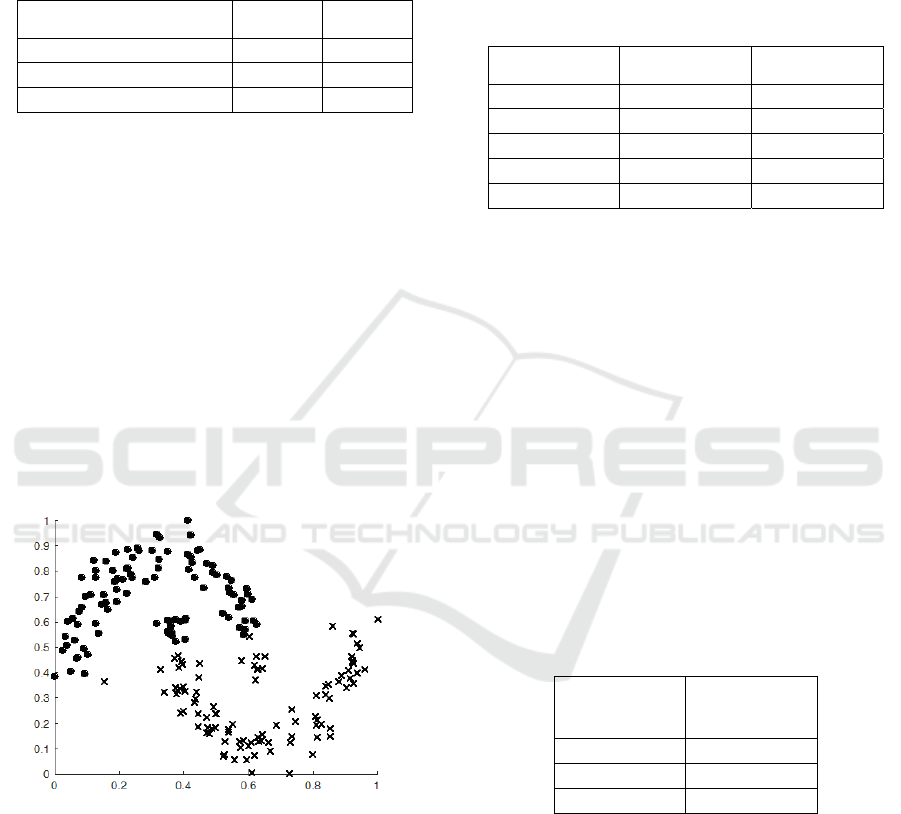
For the sake of exposition, firstly the well-known
“Moons” data set was considered. This choice is
conditioned by the fact that the given data set is a
difficult training instance for semi-supervised
support vector machines due to its non-linear
structure. The “Moons” problem is a classical semi-
supervised problem for testing algorithms. It consists
of two groups of moon-like sets of points, which are
easily recognized as two classes by a human, but
represent significant difficulty for modern
algorithms. In the conducted experiments only 2
labelled points for every class were known, and the
rest of the points were classified using the semi-
supervised SVM described above. The results
obtained on the “Moons” problem are shown in
Figure 5.
Figure 5: Semi-supervised classification of “Moons”.
As can be seen, the algorithm does not recognize
all points correctly, i.e. it builds an almost linear
classification. However, most of the points are in the
right class.
Then two medical diagnostic problems, namely
Breast Cancer Wisconsin (BCW) and Pima Indian
Diabetes (PID), were solved. Both problems are
binary classification tasks. For these data sets, 10
examples were randomly selected to be used as
labelled examples, and the remaining instances were
used as unlabelled data. The experiments are
repeated 10 times and the average accuracies and
standard deviations are recorded. The results are
shown in Table 9. Alternative algorithms (linear
SVMs) for comparison are taken from (Li and Zhou,
2011).
Table 9: Performance comparison of semi-supervised
methods.
BCW PID
TSVM 89.2±8.6 63.4±7.6
S3VM-c 94.2±4.9 63.2±6.8
S3VM-p 93.9±4.9 65.6±4.8
S3VM-us 93.6±5.4 65.2±5.0
This study 95.5±1.8 69.3±1.5
The gas turbine dangerous vibrations problem
includes 11 input variables, which are process
parameters, potentially connected to the vibration
level, and the output is the class number –
dangerous/stable vibration level. The vibration
signal is one of the most important diagnostic
instruments when measuring the turbine wear.
For the experiments with this dataset, we have
used 5%, 10% and 15% of the labelled data for
training, while the rest of the training set was
unlabelled. The total size of the dataset is 1000
instances, 900 were used for training, while 100
instances were left for a test set. In 3 experiments,
the number of labelled examples was 45, 90 and 135
instances. The average classification quality on the
test set obtained after 10 experiments is presented in
Table 10.
Table 10: Performance comparison, gas turbine dataset.
Labelled
COBRA Semi-
supervised
SVM
5% 86.2±1.7
10% 87.8±0.4
15% 88.2±0.6
The classification quality is relatively high even
with only 5% of labelled examples in the training
set. This result provides the possibility to use a vast
amount of available unlabelled data for model
improvements in future.
Consequently, the inference should be drawn that
the suggested algorithm successfully solved all the
problems of designing semi-supervised SVM-based
classifiers with competitive performance. Thus, the
study results can be considered as confirming the
reliability, workability and usefulness of the fuzzy
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
70

controlled cooperative algorithm in solving real
world optimization problems.
6 CONCLUSIONS
The problem of semi-supervised classification is
important due to the fact that obtaining labelled
examples is often very expensive. However, using
this data during classification may be helpful. In this
paper, the semi-supervised SVM was trained using a
cooperative algorithm, whose components were
automatically adjusted by a fuzzy controller. The
fuzzy controller itself was tuned to deliver better
results for constrained optimization problems. This
tuning of the meta-heuristic allowed better results of
SVM training to be achieved, compared to other
studies. The proposed approach, combining biology-
related algorithms and fuzzy controllers could be
applied to other complex constrained optimization
problems.
ACKNOWLEDGEMENTS
Research is performed with the support of the
Ministry of Education and Science of Russian
Federation within State Assignment project №
2.1680.2017/ПЧ.
REFERENCES
Akhmedova, Sh., Semenkin, E., 2013 (1). Co-Operation of
Biology related Algorithms. In IEEE Congress on
Evolutionary Computations. IEEE Publications.
Akhmedova, Sh., Semenkin, E., 2013 (2). New
optimization metaheuristic based on co-operation of
biology related algorithms, Vestnik. Bulletine of
Siberian State Aerospace University. Vol. 4 (50).
Bastos, F. C., Lima, N. F., 2009. Fish School Search: an
overview, Nature-Inspired Algorithms for
Optimization. Series: Studies in Computational
Intelligence. Vol. 193.
Bennett, K. P., Demiriz, A., 1999. Semi-supervised
support vector machines, Advances in Neural
Information Processing Systems 11.
Bishop, C. M., 1996. Theoretical foundation of neural
networks. Technical report, Aston Univ., Neural
computing research group, UK.
Deb, K., 2000. An efficient constraint handling method for
genetic algorithms, Computer methods in applied
mechanics and engineering. Vol. 186(2-4).
Eiben, A. E., Smith, J. E., 2003. Introduction to
evolutionary computation, Springer. Berlin.
Frank, A., Asuncion, A., 2010. UCI Machine Learning
Repository. Irvine, University of California,
School of Information and Computer Science.
http://archive.ics.uci.edu/ml
Joachims, T., 1999. Transductive inference for text
classification using support vector machines. In
International Conference on Machine Learning.
Kennedy, J., Eberhart, R., 1995. Particle swarm
optimization. In IEEE International Conference on
Neural Networks.
Kuncheva, L. I., 2000. How Good Are Fuzzy If-Then
Classifiers, IEEE Transactions on Systems, Man, and
Cybernetics, Part B: Cybernetics. Vol. 30, No. 4.
Lee, C.-C., 1990. Fuzzy logic in control systems: fuzzy
logic controller-parts 1 and 2, IEEE Transactions on
Systems, Man, and Cybernetics. Vol. 20, No. 2.
Li, Y. F., Zhou, Z. H., 2011. Improving Semi-Supervised
Support Vector Machines Through Unlabeled
Instances Selection. In The Twenty Fifth AAAI
Conference on Artificial Intelligence.
Liang, J. J., Shang Z., Li, Z., 2010. Coevolutionary
Comprehensive Learning Particle Swarm Optimizer.
In CEC’2010, Congress on Evolutionary
Computation. IEEE Publications.
Ravi, S., 2014. Semi-supervised Learning in Support
Vector Machines. Project Report COS 521.
Vapnik, V., Chervonenkis, A., 1974. Theory of Pattern
Recognition, Nauka. Moscow.
Whitley, D., 1995. Building Better Test Functions. In The
Sixth International Conference on Genetic Algorithms
and their Applications.
Yang, Ch., Tu, X., Chen, J., 2007. Algorithm of marriage
in honey bees optimization based on the wolf pack
search. In International Conference on Intelligent
Pervasive Computing.
Yang, X. S., 2009 Firefly algorithms for multimodal
optimization. In
The 5th Symposium on Stochastic
Algorithms, Foundations and Applications.
Yang, X. S., 2010. A new metaheuristic bat-inspired
algorithm. Nature Inspired Cooperative Strategies for
Optimization, Studies in Computational Intelligence.
Vol. 284.
Yang, X. S., Deb, S., 2009. Cuckoo Search via Levy
flights. In World Congress on Nature & Biologically
Inspired Computing. IEEE Publications.
Zhu, X., Goldberg, A. B., 2009. Introduction to Semi-
Supervised Learning, Morgan and Claypool.
Semi-supervised SVM with Fuzzy Controlled Cooperation of Biology Related Algorithms
71
