
Developing a Mathematical Model of Oil Production in a Well That
Uses an Electric Submersible Pumping System
María Hallo
1
, Byron Jaramillo
2
, José Aguilar
1,3
, Hector Lozada
3,4
and Edgar Camargo
4
1
Escuela Politécnica Nacional, Quito, Ecuador
2
NOUX C.A., Quito, Ecuador
3
CEMISID, Dpto. Computación, Universidad de los Andes, 5101, Mérida, Venezuela
4
PDVSA, Línea de Servicio AIT, Maracaibo, Venezuela
Keywords: Genetic Programming, Electro Submersible Pump Efficiency, Identification Problem, Well Production.
Abstract: This paper presents an approach to get a mathematical model for describing the production of an Electro
Submersible Oil Pumping System (ESP). The determination of this mathematical model considering the
variables of the process, is a very hard task. In this case, we propose the determination of this model using a
data approach, in order to exploit the large quantity of data about the process obtained from its sensors. Our
approach based on data uses the genetic programming techniques for the identification of the mathematical
model, which follows an evolutionary process to solve the problem. Our approach has been implemented
using an extension of R program. The training data were collected from an oil well. This paper presents the
results of the training phase and of the generated models after several iterations. Additionally, the paper
analyses the differences between the generated models, according to the number of variables considered, the
complexity of the expressions, and the error.
1 INTRODUCTION
Due to the demands of productivity, safety and
profitability in the industry, process automation
demands sophisticated and complex Information
Communication and Automation Technology
(ICATs), which must operate on different platforms
and exploit diverse data and information sources.
Thus, the number, complexity, and variety of ICAT
applications for process automation continue to grow.
In previous works, we have proposed a
mechanism for integrating the different intelligent
techniques, to conform what we have called an
Intelligent Autonomous System for Petroleum
Processes (SAi2P, for its acronym in Spanish
"Sistema Autonómico Inteligente para Procesos
Petroleros"), which has the abilities to adapt to new
situations, and possesses attributes of reasoning to
generalize and discover knowledge from the data,
among other things, to make decisions about the
processes (Lozada et al., 2017). In this way, SAi2P
involves concepts, paradigms and adaptive
algorithms, which allow to generate appropriate
actions in complex and changing environments.
Specifically, one of the tasks of SAi2P is the
optimization of operational performance, and in order
to perform this task, it is necessary to determine the
mathematical expression that calculates the
efficiency of the production process of a well, based
on the process variables. This mathematical function
allows several things, from predicting the behavior of
the well, until detecting possible problems in the
production process.
SAi2P has been instanced in an oil production
process based on the Electric Submersible Pumping
system (ESP) (Ronning, 2011), which is an
economical and efficient method of artificial crude
lifting, capable of handling large volumes of fluids.
In this paper, we propose an approach to define the
mathematical model of the efficiency of the
production of a well, which uses an Electro
Submersible Pumping System, based on genetic
programming.
The genetic programming has been used to solve
problems of system identification, based on the data
about the system in study. Genetic programming
follows an evolutionary process of the species, and
uses a population of solutions (in our case,
mathematical models) in order to search the best one,
according to the goals of the problem to reach (in our
230
Hallo, M., Jaramillo, B., Aguilar, J., Lozada, H. and Camargo, E.
Developing a Mathematical Model of Oil Production in a Well That Uses an Electric Submersible Pumping System.
DOI: 10.5220/0006421202300237
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 230-237
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
case, to follow the behavior of the production).
We consider a real case of oil production. The
application range of this lifting method is between
300 and 80,000 Barrels by day (BPD) for a variety of
operating conditions, in oil crudes ranging from 8.5
to 40° API and viscosities of up to 5000 cp
(centipoise). Additionally, the depths are between
1000 and 14,000 feet with bottom temperatures up to
350° F.
In general, the cost for installing an ESP system is
high, so it requires an adequate operational
management if its useful life is to be extended. That
is why keeping this system within its operational
parameters is the main task of real-time supervising
systems. However, getting an optimal set point of
operation is usually based on the experience of the
field operator. On the other hand, a lot of data from
these systems are being stored in the operational
databases of real-time monitoring systems. This
situation represents a great opportunity for the
development of mathematical models, to describe the
efficiency of the pump of an ESP system, according
to its operational parameters, with the aim of
maximizing production. (Bermúdez, 2015), (Osman
et al., 2005).
In this paper, we propose an approach to
determine the mathematical model that describes the
efficiency of the pump of an ESP system, using the
data stored in the operational databases. Our approach
is based on the genetic programming, and it is able to
determine the mathematical model of the efficiency
of the pump in function of its operational parameters,
with the final objective of optimizing the production
of the system.
Also, this paper presents the theoretical
framework to develop the model, and the parameters
considered as well as the procedure for the creation of
the model. Finally, it presents several operational
scenarios, as well as the results and their analysis.
2 CONTEXT
2.1 Well Problem
This article focuses on the development of a
mathematical model, which describes the efficiency
of a ESP, using its operational variables, such as
(Pwf) flowing pressure of the well, (Php) Pressure in
the Production Head, (Thp) Temperature in the
Production Head, and Produced Flow (Qprod), which
are captured in the field by temperature and pressure
sensors, and are integrated to control devices, and
then transmitted wirelessly to the control rooms,
where production operators adjust the values. The
behaviour of the ESP system can be described by a
serie of characteristic curves, such as load vs flow,
efficiency vs flow, power vs flow, supplied by the
system manufacturer taking into account its model,
engine frequency, speed of rotation, and the specific
gravity (Ramírez, 2004).
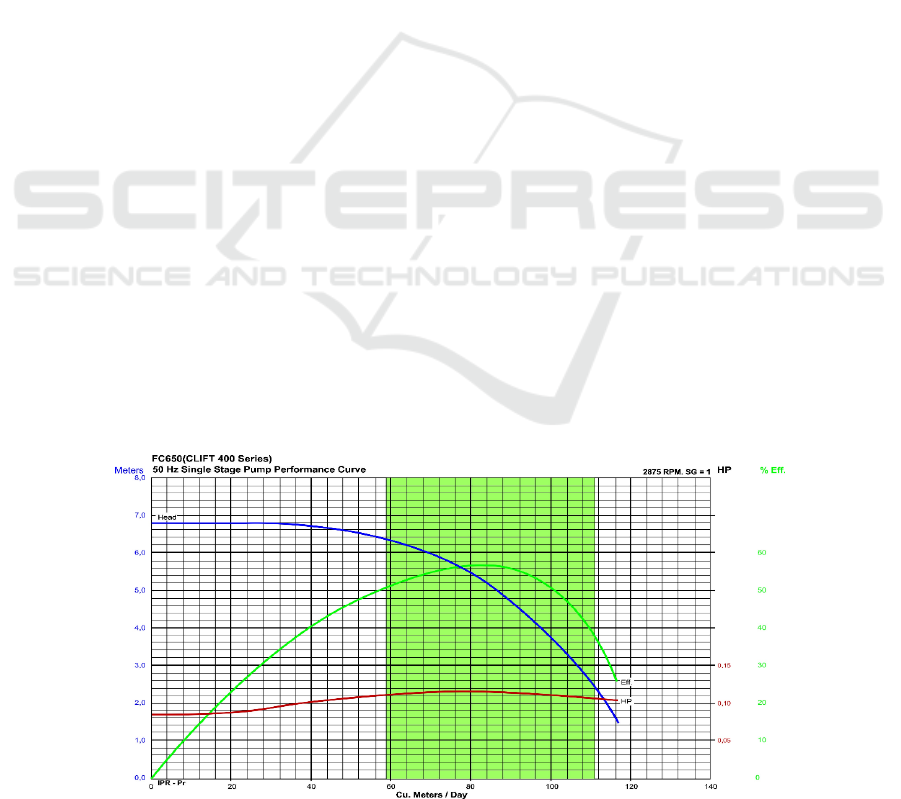
Determining the point of operation of the pump
will be a task where factors such as the total system
load and the load vs. flow curve will play a
fundamental role, and the intersection of each curve
marks the point of operation of the system (See Figure
1), (Baieli et al., 2006). The Figure 1 also shows the
curves of the operational parameters of the system,
and the green zone determines the most efficient
region of operation of a well based on an ESP system.
In general, the flow regulation in this type of
system is performed by adjusting the motor rotation
speed, this results in a change in the flow rate, and this
change causes a new point of operation of the system.
Figure 1: ESP characteristic curves.
Developing a Mathematical Model of Oil Production in a Well That Uses an Electric Submersible Pumping System
231
Likewise, the changes in the physical conditions of
the fluid in which the system works bring as a
consequence a change in the curves, and therefore,
another point of operation of the system.
Keeping the system at an optimum efficiency
point is a task that must be constantly carried out
whenever there are changes in the operating
conditions of the system. In order to achieve this, it is
necessary to have a mathematical model that
describes the efficiency behaviour, in function of the
operational variables of the system.
2.2 SAi2P
In previous works, we have proposed an Intelligent
Autonomous System for Petroleum Processes called
SAi2P, which can generate and discover knowledge
from the data in the process, to make decisions about
it (Lozada et al., 2017). SAi2P uses a set of concepts,
paradigms and adaptive algorithms, which allow to
generate appropriate actions in complex and changing
environments.
SAi2P is defined by a closed loop of data
analytical tasks, which allow exploiting the data
about the oil process, in order to carry out an
intelligent supervision of it (Camargo et al., 2014). In
general, an "Autonomic Cycle of Data Analysis"
defines a set of tasks of data analysis, whose common
goal is to achieve an improvement in the process
under study (Aguilar et al., 2016). They interact with
each other, and have different roles: observe the
process, analyze and interpret what happens in it, or
make decisions in order to improve the process. The
integration of data analytics tasks allows solving
complex problems that have far been impossible to
study by the amount of knowledge required for
resolution.
Particularly, in this paper, we consider SAi2P, an
autonomic cycle of data analytical tasks for oil
production. The autonomous cycle defines a closed
loop of tasks of analysis of data, which supervises
permanently the oil process. It is a supervision cycle
of processes based on LA tasks, in order to
permanently improve them. Specifically, the data
analysis tasks in the autonomous cycle are:
Monitoring of events affecting the world oil
market.
Identification of production cost.
Monitoring of the trends of variables.
Identification of patterns of oil prices.
Economic profitability assessment.
Recognition of fault patterns.
Diagnosis of the operational problems.
Optimization of the operational performance.
Maximization of the production at the lowest cost.
Specifically, in this paper, we are interested in the
“optimization of the operational performance” task of
SAi2. In order to perform this task, it is necessary to
determine the mathematical expression that
calculates the efficiency of the production process of
a well, based on the process variables. This paper
proposes an approach for that.
2.3 Genetic Programming
Genetic Programming is a technique that
automatically solves problems, without requiring the
user to know the structure of the solution in advance
(Aguilar et al., 2001); (Langdon et al., 2013).
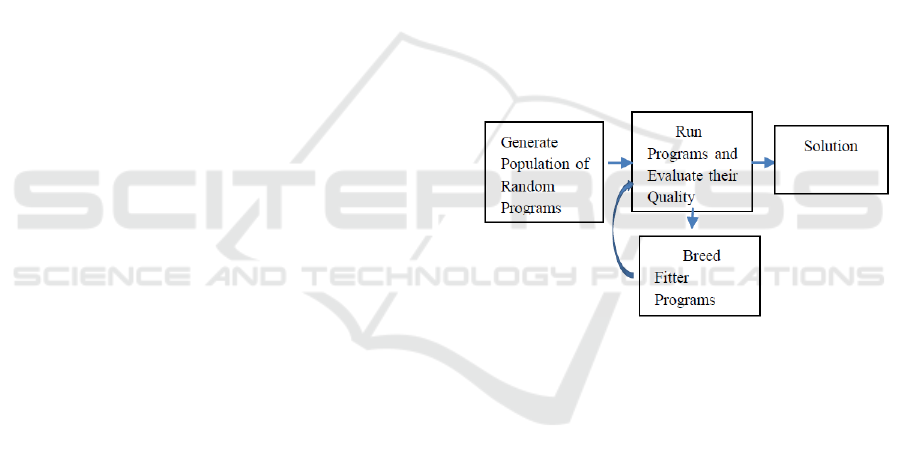
Fig. 2 is a flowchart that shows how the
evolutionary process works. The initial step is to
create a population of program trees that are
randomly assembled from the available inputs. This
allows a broad sampling of possible inputs, and
begins the search for productive combinations.
Figure 2: Control Flow for Genetic Programming.
The initial population will probably have a poor
performance overall, some individuals will perform
better than others because of their features, or the way
how they have combined the parameters. It is
improved in the next generations, using an
evolutionary process, where the best individuals are
selected to generate new individuals, which must be
better with respect to the individuals of the previous
generations.
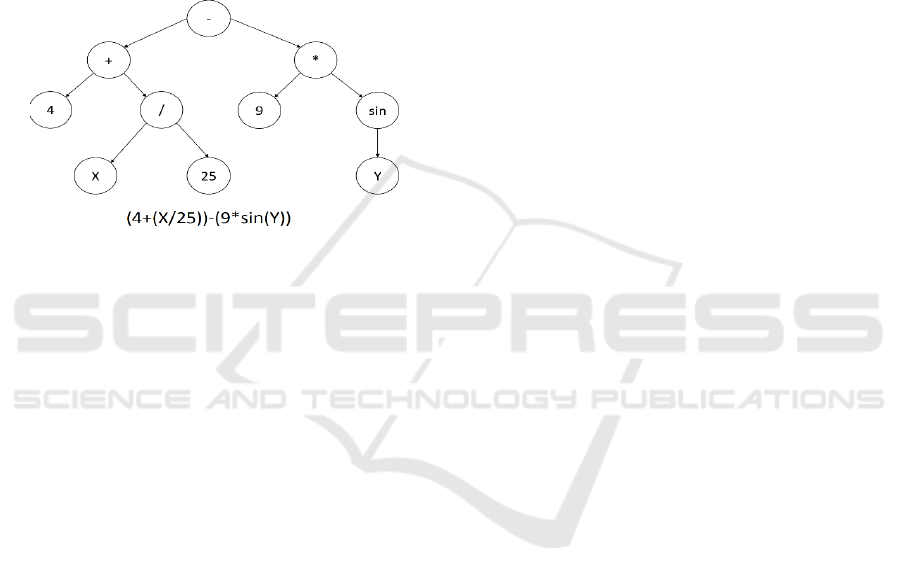
In the Genetic Programming, the programs are
usually expressed as syntax trees. The variables and
constants in the program are leaves of the tree. The
arithmetic operations (+,*, etc.) are internal nodes
called functions.
The steps of the Genetic Programming are:
Initialization. The individuals in the initial
population are typically randomly generated.
Selection. Genetic operators are applied to
individuals that are probabilistically selected
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
232
based on their fitness. That is, better individuals
are more likely to have more kids than inferior
individuals.
Apply genetic operators. The genetic operations
that are used to create new programs from existing
ones are:
o Crossover: The creation of a child by
combining randomly chosen parts from two
selected parent program.
o Mutation: The creation of a new child by
randomly altering a randomly chosen part of a
selected parent program.
Figure 3: Genetic Programming syntax tree representing a
mathematical expression.
2.4 Genetic Program in System
Identification
There are some works about the application of genetic
programing in the identification problem.
(Iba et al., 1995) presents a genetic programming,
which integrates a local parameter tuning mechanism
employing statistical search, for the system
identification. More precisely, they integrate the
structural search of traditional genetic programing
with a multiple regression analysis method to
establish an adaptive program, called
STROGANOFF (STructured Representation On
Genetic Algorithms for NOn-linear Function Fitting).
The fitness evaluation is based on a minimum
description length (MDL) criterion, which effectively
controls the tree growth in GP.
In (Witczak et al., 2002) it is provided a system
identification framework based on genetic
programming technique. Moreover, a fault diagnosis
scheme for non-linear systems is proposed. In
particular, they show how to use the genetic
programming technique to increase the convergence
rate of the observer. (Patelli, 2011) approaches the
nonlinear system identification problem, by
suggesting several original genetic programming
based algorithms enhanced with various mechanisms
designed to increase run time performance.
(Kötzing et al., 2011) analyses the Genetic
Programming in the well-known PAC learning
framework and point out how it can observe quality
changes in the evolution of functions by random
sampling. This leads to computational complexity
bounds for a linear genetic programming algorithm
for perfectly learning any member of a simple class
of linear pseudo-Boolean functions. Finally, (Madar,
2005) proposes a method for the structure selection of
Linear-in-parameters models, which uses genetic
programming to generate nonlinear input−output
models of dynamical systems that are represented in
a tree structure. The main idea of the paper is to apply
the orthogonal least squares (OLS) algorithm to
estimate the contribution of the branches of the tree
to the accuracy of the model.
Our approach presents an innovative application
of genetic programming in the field of continuous
processes, in particular, the identification of systems
in petroleum processes using data stream. To our
knowledge, there are no such applications in this
field.
3 SYSTEM IDENTIFICATION
BASED ON GENETIC
PROGRAMMING
In this section, we present our approach for the
determination of the mathematical expression that
calculates the efficiency of the production process of
a well, based on the process variables. The steps of
our approach, based on genetic programming are:
1. Definition of the parameters of the problem.
2. Determination of the quality of the data.
3. Implementation of the Genetic Programming
model.
4. Test and validation of the results
3.1 Definition of the Parameters of the
Problem
The operational parameters used to develop the
mathematical model for describing the EPS system
used in the oil production are:
Pwf (psi): Background Fluent pressure (referring
to the vertical midpoint of the perforations).
Php (psi): Pressure in the Production Head.
Frec (hz): Frequency of pump rotation.
Thp (psi): Oil temperature on the Production
Head.
Qprod (barrels/day): Oil production.
Developing a Mathematical Model of Oil Production in a Well That Uses an Electric Submersible Pumping System
233
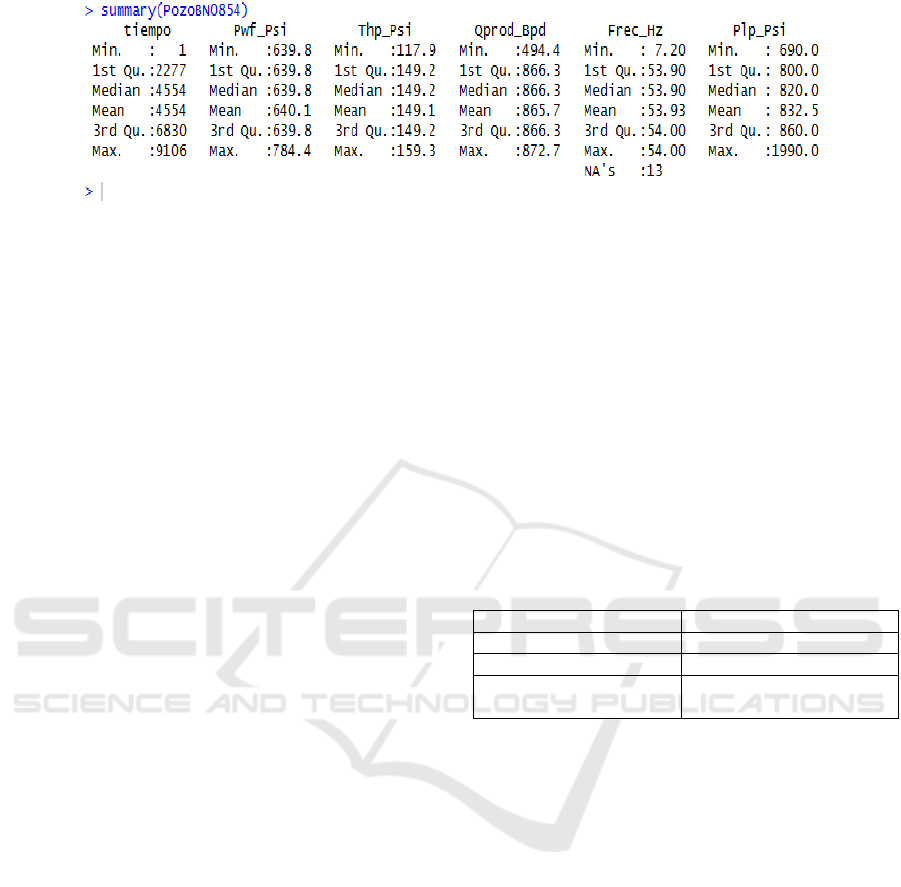
Figure 4: Initial data analysis.
Data were collected from an oil well. The number
of measures were 9107.
3.2 Determination of the Quality of the
Data
The quality of the Data were determined applying
basic statistics to find anomalies.
Figure 4 shows the results of the data analysis
with maximum and minimal values for each variable.
3.3 Implementation of the Genetic
Programming Model
To apply the Genetic Programming to a problem, we
need preparatory steps, in which are defined the set of
parameters of the genetic programming:
The terminal set, composed of variables,
functions with no arguments and /or constants
(specified or randomly generated).
The function set (arithmetic, mathematical or
Boolean functions)
The fitness measure (error between the individual
output and the desire output)
The parameters that control the run (probabilities
of the genetic operators, etc.)
The termination criterion (e.g. maximum number
of generations).
3.4 Tests and Validation of the Results
The details of this phase are shown in Section 4.
4 EXPERIMENTATION
For the implementation of our approach, we have
used the software RGP based on the R environment.
This software support Symbolic Regression using
Genetic Programming, and provides a basic set of
genetic operators: mutation, crossover and selection
(Flasch et al., 2010).
In table 1, we show the mean errors of the models
generated in a different set of experiments. In the first
experiment, we use a source of data that has
anomalous data, which represent failures in the
system. The second set of experiments uses a source
of data where have been filtered the anomalous data.
In the third set of experiments we use only correct
data, and the concept of individuals’ elite. We find the
best models in the third set of experiments, with the
lowest mean errors (0.26%), but the models found are
complexes and have only one variable (see next
Tables).
Table 1: Quality of the RGP Models generated by the
different experiments.
Conditions
Mean errors
Without filter
0,6%
With filter
0.29%
With filter and Elite
individuals
0.26%
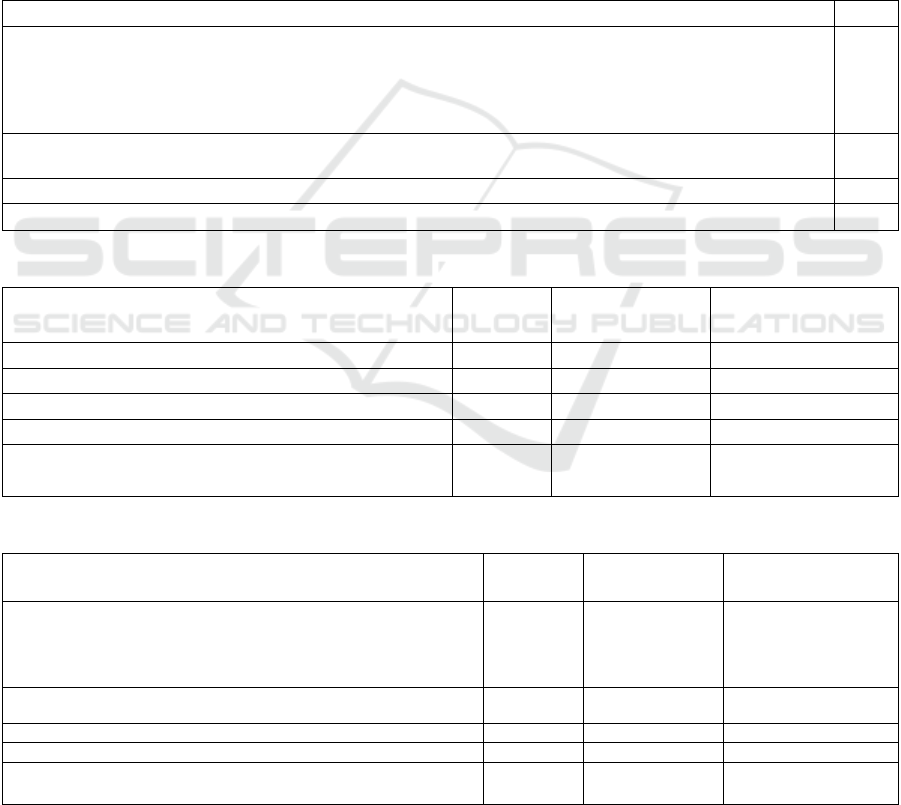
In table 2, we present some of the mathematical
models generated by the first experiment, where we
have not filtered the data, with the corresponding
errors. We obtain very complex individuals, and the
error is due to that the mathematical equations
generated in this case, consider conditions when the
system has failed. That means, the genetic
programming tries to generate a model that considers
the normal and abnormal behavior.
Table 3 shows the best results of the second
experiment. In this case, we improve the quality of
the error due to that we only consider data without
anomalous data, that means, data that do not represent
situations with faults. Again, we obtain very complex
individuals, but these mathematical equations can be
simplified, because there are constants that can be
eliminated.
Table 4 shows the best mathematical equations
generated in the third experiment, where we reduce
the error in one important level, but the number of
variables considered in the equations are very limited.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
234
To determine the best mathematical equation, we
need to combine several criteria, such as the error,
number of variables and complexity of the
expression. We like a mathematical equation with
little error because we need to follow the system, with
low complexity because the mathematical equation
must be easy to interpret, and which considers the
largest number of variables in the modeling system.
Table 5 shows these results from the different
experiments according to these criteria. The first row
is from the first experiment, and we see that this
individual is very good, but the expression is very
complex and consider only one variable. The second
equation is from the second experiment, and this
equation is very interesting because the error is
not high, it considers three variables of the process,
and the final equation is very simple.
One important remark is that the mathematical
models generated by the second and third
experiments can be used in the context of the
detection of failures in our system (Araujo et al.,
2003). These mathematical equations follow the
normal behaviour of the system, and can predict its
future behaviour. However, when the behaviour of
the real system is different to the estimated by our
models it is because the real system has an abnormal
behaviour. This can be due to failure in the system.
Table 2: RGP Models without filters, ranked by error values.
Mathematical Model
Error
exp(exp(exp(-1.45805039908737 - Frec_Hz)/(Plp_Psi * Pwf_Psi - ln(Thp_Psi)) - (exp(exp(-2.08472784608603)) - (Thp_Psi
+ 4.06191883143038)/(Pwf_Psi + Thp_Psi)) + exp(exp(ln(8.86126783676445/8.49407647270709))))) *
exp(sqrt(sqrt((sqrt(exp(-5.91158133465797)) - (-1.11350659746677 - -
1.72236355952919)/ln(Pwf_Psi))/((2.87925401702523 * 7.04056354705244 - exp(-4.26327155902982))/(-
8.26513446867466/Frec_Hz/(-3.26833550352603 * -2.56143803242594))))))
0.6%
sqrt(Frec_Hz * sqrt(Thp_Psi * ln(7.85157934296876))) + sqrt(Thp_Psi * Thp_Psi * ln(7.6389035070315)) *
ln(sqrt(exp(7.85157934296876)))
0,86%
sin(Thp_Psi) + (-8.43441986013204 + exp(6.77450031973422))
1.42%
sqrt(exp(sqrt(Thp_Psi) + ln(3.46520180348307))) + exp(3.46520180348307)
1.16%
Table 3: RGP Models with filters and without elite individuals, ranked by error values.
RGP Mathematical models
Error <1%
Variables number
Complexity of the
structure
sqrt(Pwf_Psi) + Thp_Psi + Pwf_Psi + Frec_Hz
0,36%
3
1
Frec_Hz + (Thp_Psi + Pwf_Psi + sqrt(Pwf_Psi))
0,36%
3
1
sqrt(Pwf_Psi) + (Frec_Hz + (Pwf_Psi + Thp_Psi))
0,36%
3
1
Pwf_Psi + 4.17186871170998 * Frec_Hz
0,26%
2
2
sqrt((Thp_Psi + (Thp_Psi + Pwf_Psi)) * (Thp_Psi + Pwf_Psi)) +
5.222307164222
0,29%
2
2
Table 4: RGP Models with filter and elite individuals, ranked by error values.
RGP Mathematical models
Error <1%
Variables number
Complexity of the
structure
exp(sqrt(sqrt(5.1154277799651 * sqrt(exp(5.1154277799651 +
6.8138162791729) + (5.1154277799651 * sqrt(exp(5.1154277799651 +
6.8138162791729)) + (Frec_Hz + exp(6.59457715693861) +
exp(6.59457715693861))))))) + Frec_Hz
0,15%
1
4
exp(6.75399861298501) + sqrt(Frec_Hz)
0,22%
1
3
5.8022110722959 * Thp_Psi
0,46%
1
1
Pwf_Psi * 1.35906734503806
0,46%
1
1
9.91066501475871 + sqrt(sqrt(sqrt(exp(Frec_Hz)))) +
9.91066501475871
0,63%
1
3
Developing a Mathematical Model of Oil Production in a Well That Uses an Electric Submersible Pumping System
235

Table 5: Best mathematical models, based on the error, number of variables and complexity.
RGP Mathematical models
Error
Complexity of the structure
Variables
exp(sqrt(sqrt(5.1154277799651 * sqrt(exp(5.1154277799651 +
6.8138162791729) + (5.1154277799651 * sqrt(exp(5.1154277799651 +
6.8138162791729)) + (Frec_Hz + exp(6.59457715693861) +
exp(6.59457715693861))))))) + Frec_Hz
0.15%
High
Frec
Frec_Hz + (Thp_Psi + Pwf_Psi + sqrt(Pwf_Psi))
0.36%
Low
Frec, Thp, Pwf
5 CONCLUSIONS
SAi2P is a closed loop of data analytical tasks, which
allow integrating different analytical tasks in order to
give an intelligent supervision of an oil process. This
framework requires of complex data analytical task in
order to improve the production process. In this
paper, we have studied one of them, to determine the
model of production of a well, in order to define the
model of optimization of its production.
Genetic Programming has been the intelligent
technique used, and it has been an appropriated
approach to get the mathematical model from data of
the process. We have carried out different tests, with
different data, in order to analyse different criteria
about the mathematical equations obtained. These
criteria were the error, number of variables and
complexity of the expression.
The mathematical models obtained are very
interesting, because their quality are very different,
according to the criteria used. Additionally, some of
the models obtained can be used in the context of fault
detection, because they can follow the normal
behaviour of our system. When the real system
change its behaviour due to a failure, a detection
system based on our mathematical equations can
detect it (Araujo et al. 2003).
With respect to previous works, in the literature
(Patelli, 2011), (Cerrada et al., 2001) have been
proposed several approaches for the identification
problem using genetic programming. The main
differences with our approach, it is that our approach
can be used in real time, and it forms part of SAi2P,
an autonomic loop of data analytical tasks that allows
the intelligent supervision of an oil process.
ACKNOWLEDGMENT
Dr. Aguilar has been partially supported by the
Prometeo Project of the Ministry of Higher
Education, Science, Technology and Innovation
(SENESCYT) of the Republic of Ecuador.
REFERENCES
Aguilar, J. and Rivas, F. (2001) Introducción a las Técnicas
de Computación Inteligente, Meritec.
Aguilar J. Buendia O., Moreno K., Mosquera D. (2016)
Autonomous Cycle of Data Analysis Tasks for Learning
Processes, Technologies and Innovation (R. Valencia-
García, et al., Eds.), Communications Computer and
Information Science Series, Vol. 658, Springer, pp.
187-202.
Araujo, M. Aponte, H. and Aguilar J. (2003) “Fault
Detection System in Gas Lift Well based on Artificial
Immune System”. Proceeding of the International Joint
Conference on Neural Networks, pp. 1673-1677.
Baieli, L. Daparo, D. and Pereyra, M (2006) “Experiencia
con bombas electro sumergibles de bajo caudal”, Wood
Group ESP. Argentina.
Bermúdez, F. Carvajal, G Moricca, G. Dhar, J. and Adam
F. (2014) “Fuzzy Logic Applications to Monitor and
Predict Unexpected Behavior in Electric Submersible
Pump. Society Petroleum Engineers”. SPE-167820-
MS.
Camargo, E. and Aguilar, J. (2014) “Advanced Supervision
of Oil Wells based on soft computing Techniques”,
Journal of Artificial Intelligence and soft computing
research, Vol 4. Number 3, 215-225.
Camargo, E. and Aguilar, J. (2014) “Hybrid Intelligent
Supervision Model of Oil Wells”, Proceedings of the
IEEE World Congress on Computational Intelligence
(IEEE WCCI), pp. 934 – 939.
Cerrada M., and Aguilar, J. (2001) “Genetic Programming-
Based Approach for System Identification”, Advances
in Fuzzy Systems and Evolutionary Computation,
Artificial Intelligence (Ed. N. Mastorakis), World
Scientific and Engineering Society Press, pp. 329-334.
Flasch, O., Mersmann, O.,and Bartz-Beielstein, T. (2010).
“RGP: An open source genetic programming system for
the R environment”, In Proceedings of the 12th annual
conference companion on Genetic and evolutionary
computation (pp. 2071-2072). ACM.
Iba H., deGaris H., Sato M., (1995). A Numerical Approach
to Genetic Programming for System Identification.
Evolutionary Computation, 3 (4): 417-452.
Kötzing T., Neumann F., Spöhel R. (2011). PAC Learning
and Genetic Programming, Genetic and Evolutionary
Computation Conference.
Langdon, W. B., and Poli, R. (2013). Foundations of
genetic programming. Springer Science & Business
Media.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
236

Lozada H., Aguilar J., Camargo E. (2017) “Sistema
Autonómico Inteligente Para Procesos Petroleros
(SAi2P)”, submitted to publication, Latin American
Journal of Computing.
Madar J., Abonyi J., Szeifert F., (2005). Genetic
Programming for the Identification of Nonlinear Input-
Output, Industrial & Engineering Chemistry Research,
44 (9), 3178–3186.
Osman, O. Shalaby, S. Elayouty. E. and Soleiman, M.
(2005) “Production Data Analysis for Electric
Submersible Pumping (ESP) well” In Proceedings of
Offshore Mediterranean Conference.
Patelli A. (2011). Genetic Programming Techniques for
Nonlinear Systems Identification, Ed. Politehnium.
Poli, R. (2010). “Genetic programming theory”.
In Proceedings of the 12th annual conference
companion on Genetic and evolutionary
computation (pp. 2473-2502). ACM.
Ramírez, M. (2004) “Bombeo Electrosumergible: Análisis,
Diseño, Optimización y Trouble Shooting. Technical
Report”, ESP OIL Maturín. Monagas.Venezuela.
Ronning, R (2011) “Automatic Start-up and Control of
Artificially Lifted Wells, Technical Report”,
Norwegian University of Science and Technology.
Department of Engineering Cybernetics.
Witczak M., Obuchowicz A. KorbiczWitczak J. (2002).
Genetic programming based approaches to
identification and fault diagnosis of non-linear dynamic
systems. International Journal of Control 75(13): 1012-
1031.
Developing a Mathematical Model of Oil Production in a Well That Uses an Electric Submersible Pumping System
237
