
Parameter Identification of an Electrical Battery Model
using DC-IR Data
Ayse Cisel Aras and Emre Yonel
AVL Research and Engineering, Istanbul, Turkey
Keywords:
Electrical Battery Model, Parameter Identification, DC-IR Data, Curve Fitting, Genetic Algorithm.
Abstract:
Parameter identification of an electrical battery model is significant for the analysis of the performance of a
battery. In order to obtain an accurate electrical battery model, a series of cell characterization tests should be
conducted which will take a considerable amount of time. In this study, in order to identify the parameters of
the electrical battery model in a short amount of time with an acceptable accuracy, DC-IR data is used. DC-IR
test will take less time compared to the cell characterization tests. For the parameter identification, one of
the most commonly used evolutionary algorithm (EA), Genetic Algorithm (GA) is used for the curve fitting
problem and its performance is compared with the Levenberg-Marquardt algorithm.
1 INTRODUCTION
The battery systems are having a bigger role in au-
tomotive industry since the emergence and develop-
ment of Electrical Vehicles (EVs) and Hybrid Elec-
trical Vehicles (HEVs). The performance metrics for
batteries become more important, as the demand for
electrical vehicles continues and sustains a competi-
tion on higher efficiencies, lower consumptions in an
environment of stricter emission standards.
In automotive applications it is a necessity to es-
timate and control State of Charge (SOC), capacity,
State of Health (SOH), remaining useful life, remain-
ing available power of a battery since the performance
of the vehicle is highly dependent on those battery
states. Modern Battery Management Systems (BMS)
use various methods to estimate these battery states in
order to make sure that battery is working in a safe op-
erating region. One of the methods that helps estimat-
ing the states of the battery and analyzing the battery
performance is to obtain an accurate battery model.
In this study, battery model for lithium-ion batteries
are considered.
In literature, there are methods based on equiva-
lent circuit model for the battery modeling, such as;
electrochemical and electrical models (Waag et al.,
2014). Electrochemical models define the chemi-
cal processes in a battery and are highly accurate
models. However, they possess a high computa-
tional burden (Seaman et al., 2014). One of the most
widely used methods among the electrical models is
the Electrochemical Impedance Spectroscopy (EIS),
but its complexity of the equipment and process are
preventing the applications of EIS on to vehicles.
EIS can estimate many properties of a battery; Re-
sistance (ohmic, polarization), Capacitance (double-
layer, coating), Constant-Phase Elements and Induc-
tance, with an equivalent circuit approximation. But
this method requires relevantly high precision equip-
ment and AC-stimulation of the battery (Khan et al.,
2016).
In this study, in order to benefit the advantage
of using electrical equations, an electric equivalent
circuit model is used. In literature, there are vari-
ous studies that estimates the parameters of electri-
cal equivalent circuit models (Sepasi et al., 2014),
(Nejad et al., 2016), and (Mesbahi et al., 2016). In
(Sepasi et al., 2014), a novel approach, model adap-
tive extended Kalman filter (MAEKF), is proposed
in order to estimate the SOC of a lithium-ion bat-
tery. The SOC is not a measurable value, so it has
to be estimated. An electrical battery model is used
for this estimation and the parameters of the electri-
cal model are identified by using an optimization al-
gorithm in the proposed MAEKF method. The per-
formance of the proposed approach is compared with
the extended Kalman filter (EKF). The drawback of
the EKF method is that it relies on the electric model
parameters and may not handle the aging of the cell,
accurately. The obtained results show that the pro-
posed approach is able to handle this drawback of
the EKF method. In (Nejad et al., 2016), the most
Aras, A. and Yonel, E.
Parameter Identification of an Electrical Battery Model using DC-IR Data.
DOI: 10.5220/0006422705750581
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 575-581
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
575

commonly used lumped-parameter equivalent circuit
models used in literature for modeling lithium-ion
batteries are examined. The model parameters and
states of the battery model are estimated by using
dual Extended Kalman Filter (dual-EKF) and its per-
formance is verified through pulsed current test re-
sults and the New European Drive Cycle (NEDC)
driving cycle profile over a temperature range be-
tween 5∼45
◦
C. Two cell chemistries are tested,
lithium iron phosphate (LiFePO
4
) and lithium nickel-
manganese-cobalt oxide (LiNMC). The simulation
studies indicate that two RC model structure is the
optimum lumped-parameter equivalent circuit model
for the battery energy and management applications.
In (Mesbahi et al., 2016), a 40Ah lithium-ion battery
cell is modeled by a dynamic equivalent circuit model
to be used in Electric Vehicle (EV) applications. A
hybrid Particle Swarm-Nelder-Mead (PSO-NM) opti-
mization algorithm is used in the identification of the
model parameters of the battery model. The perfor-
mance of the battery model is tested with a dynamic
driving cycle and a constant current/constant voltage
(CC/CV) charge profile. The obtained results show
that the modeling error is below 0.5% within a differ-
ent operating conditions.
This paper proposes a simplification on equivalent
circuit approximation by the usage of DC-IR data val-
ues. DC-IR values are internal resistance values of the
battery, which are dependent both on SOC and tem-
perature. For the calculation of the internal resistance,
two measured voltage and current values are needed.
These tests can be conducted in a short amount of
time. In this work, the aim is to obtain an acceptable
battery model in a reasonable amount of time.
In this study, two methods are used for the esti-
mation of the electrical battery model, Genetic Algo-
rithm(GA) and Nonlinear Least Squares (Levenberg-
Marquardt Algorithm) and their performances are
compared.
Genetic Algorithm is one of the most commonly
used Evolutionary Algorithms (EAs) that can be ap-
plied to both constrained and unconstrained optimiza-
tion problems. It can be used in a wide variety of
engineering problems, such as; image analysis, opti-
mization, classification, and etc. (Sopov and Ivanov,
2014), (Kaabi and Jabeur, 2015), and (Gasanovaet al.,
2014). In (Sopov and Ivanov, 2014), an image anal-
ysis problem, age recognition, is investigated. In this
work, genetic algorithm is used with a novelty search.
The obtained results indicate that the computational
cost of the proposed approach is high compared to
traditional approaches. However, it can be imple-
mented to the problems that do not have a prior in-
formation about the problem. In (Kaabi and Jabeur,
2015), a Multi-Compartment Vehicle Routing Prob-
lem with Time Windows (MCVRPTW) with profit is
considered. This problem is handled via a hybrid ap-
proach, genetic algorithm with Iterated Local Search
(ILS). The novelty of this work is that the problem
is formulated considering the time windows and col-
lected profit. The genetic algorithm is used to obtain
a minimum traveling cost and this solution is solved
via Iterated Local Search considering temporal, ca-
pacity, and profit constraints. In (Gasanova et al.,
2014), text classification problem is handled. The size
of the text classification is reduced based on hierar-
chical agglomerative clustering algorithm. Then, the
weights of the clusters are optimized with cooperative
coevolutionary genetic algorithm.
The performance of the genetic algorithm
is compared with one of the most commonly
used parameter identification method, Levenberg-
Marquardt. There are several applications that uses
Levenberg-Marquardt method for parameter identifi-
cation (Talebitooti and Torabi, 2016), (Dkhichi et al.,
2014), and (Khan et al., 2014). In (Talebitooti and
Torabi, 2016), a semi-epirical tire is modeled with a
hybrid identification method, genetic algorithm and
Levenberg-Marquardt method. The advantage of the
hybrid method is indicated with a comparison of ex-
isting methods in literature, Starting Values Opti-
mization technique (SVO), IMMa Optimization Al-
gorithm (IOA) in terms of accuracy and convergence
rate. In (Dkhichi et al., 2014), a highly non-linear
solar cell is modeled based on Levenberg-Marquardt
(LM) method with simulated annealing (SA). The ob-
tained results of the proposed approach (LMSA) are
compared to the methods in literature and it is ob-
served that the proposed approach has a higher ac-
curacy as compared to the other methods in literature.
In (Khan et al., 2014), the State of Charge (SOC) es-
timation of the battery is estimated online based on
parameter identification methods of the battery model
and a linear recursive Kalman filter. The parame-
ters of the battery model is identified through a com-
bination of modified genetic algorithm and modified
Levenberg-Marquardt algorithm. The proposed esti-
mation framework is online and the SOC is estimated
with an acceptable accuracy.
This study is organized as follows; In section 2,
the electrical battery model is presented. In section
3, the parameter identification methods that are used
in this study are given. In section 4, the simulation
studies and results are presented. In section 5, the
obtained results are analyzed and the future work in
this area is discussed.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
576

2 MODEL BASED APPROACH
A commonly used approach for battery modeling is
the model-based approach. In literature, there are ba-
sically two methods for the model-based approach;
electrical and electrochemical models.
Electrochemical models are highly non-linear and
it is hard to implement them in a real time application
(Waag et al., 2014). In this study, due to the highly
complex structure of the electrochemical models, an
electrical model is used for the battery model.
2.1 Electrical Battery Model
Electrical model of the battery has the advantage of
using the electrical equations (Waag et al., 2014). In
Fig. 1, a general representation of an n
th
order elec-
trical model is given. Depending on the degree of
the electrical model, the accuracy is improving; how-
ever, the implementation in real-time systems will be
harder due to the increased number of parameters.
In this work, for simplicity and computational ef-
ficiency, a second-order RC electrical model is used
as seen in Fig. 2. In this model, the fast and slow
dynamics of the battery are given by R
fast
, τ
fast
and
R
slow
, τ
slow
, respectively.
The output of the electrical model is given as in
the following:
u
cell
= u
OCV
+ u
Ohmic
+ u
fast
+ u
slow
(1)
where u
OCV
is the open circuit voltage (OCV), u
Ohmic
presents the ohmic losses from the R
Ohmic
resistance.
It indicates the pure resistive effect at high frequen-
cies. u
fast
indicates the losses due to the double-
layer effects (Butler-Volmer) between the electrode
and electrolyte of the battery. u
slow
represents the
mass transport (Warburg) effect in the battery cell due
to diffusion (Jossen, 2006).
u
cell
= u
OCV
+ I
pack
∗
R
Ohmic
+ R
fast
∗
1− e
(−t/τ
fast
)
+ R
slow
∗
1− e
(−t/τ
slow
)
!
(2)
Figure 1: n
th
order electrical equivalence circuit of a battery
model.
Figure 2: Second order electrical equivalence circuit of the
battery model.
3 PARAMETER
IDENTIFICATION OF AN
ELECTRICAL BATTERY
MODEL
In this work, the aim is to find the parameters of the
electrical battery model based on DC-IR data. In or-
der to obtain an accurate electrical battery model, cell
characterization tests should be realized. However,
these tests can be time consuming and they can last
for weeks. In this time frame, the battery cannot be
modeled and simulation studies, for instance, devel-
opment of Battery Management System (BMS), esti-
mation of the states of the battery, eg. State of Charge
(SOC), remaining available power, etc., cannot be re-
alized. In order to alleviate this problem, DC-IR test
results can be used for the estimation of the parame-
ters of the electrical battery model with an acceptable
accuracy.
In literature, there are various methods for the in-
ternal resistance determination, (Ratnakumar et al.,
2006) and (Ansen et al., 2013). In this study, a 42Ah
lithium iron phosphate (LiFePO
4
) type battery cell is
studied. The DC-IR values are obtained by using the
result of a pulse test. In this pulse test, the following
C-rate charge and discharge pulses are applied: C/5,
C/ 3, 1C, and 2C for 10 seconds at 25
◦
C. In order to
stabilize the chemical reactions in the battery, the rest
between two consecutive pulse is 10 minutes. The
pulses are applied from 90% SOC until 10% SOC and
SOC decreases 10%, incrementally. For each SOC
decrement, the mentioned C-rate pulses are applied.
From the last pulse until the pulse for SOC decrement,
the rest is for 20 minutes. From the SOC decrement
until the first pulse, the rest is for 10 minutes. The
DC-IR values are obtained by measuring the charge
and discharge voltage and current values by using the
highest C-rate, 2C, at 0.1, 1, 3, 6, and 10 time sec-
onds. In Fig. 3, the voltage response of a 10 sec-
ond 2C charge and discharge current pulse for 70%
Parameter Identification of an Electrical Battery Model using DC-IR Data
577

Figure 3: Voltage response of a 10 second 2C charge and
discharge current pulse (at 70%SOC for 25
◦
C).
Table 1: R
internal,Ch
(Ω) values at 25
◦
C and 70% SOC.
Pulse(sec) R
internal,Ch
(Ω)
0.1 0.0002
1 0.0012
3 0.0021
6 0.0023
10 0.0025
SOC at 25
◦
C is given as an example. The charge and
discharge internal resistance values for 0.1 second is
driven as follows:
R
Internal,Ch,0.1s
=
V
6
−V
Ref,Ch
I
Ref,Ch
(3)
R
Internal,DCh,0.1s
=
V
Ref,DCh
−V
1
I
Ref,DCh
(4)
An example of the derived internal resistance values
for charge current at 0.1, 1, 3, 6, and 10 seconds for
70% SOC at 25
◦
C are given in Table 1.
Initially, it is considered that 1 Ampere is given to
the electrical battery model described by Eq. 2. Thus,
the output of the electrical battery model is the resis-
tance values derived from the pulse test. In Fig. 4,
the voltage response of the model is shown. As it is
seen, the result at 0.1 second can be considered as the
ohmic resistance, R
Ohmic
of the electrical model. The
unknown parameters of the electrical model are the
time constants τ
fast
, τ
slow
and the gain values, R
fast
and R
slow
, of the fast and the slow dynamics of the
electrical battery model, respectively. By applying a
curve fitting approach, these unknown parameters of
the electrical battery model can be estimated. The de-
rived DC-IR values are used as the desired voltage
values, which are used in the parameter identification
methods described in the subsequent subsections.
0 2 4 6 8 10
0
0.5
1
1.5
2
2.5
x 10
−3
Time (Sec)
R
internal
Figure 4: An example of the DC-IR data and curve fitting
(For 2C charge current, for 70%SOC at 25
◦
C).
3.1 Parameter Identification of
Electrical Battery Model based on
Genetic Algorithm
Genetic Algorithm (GA) is one of the Evolutionary
Algorithms (EAs) that can be applied to a wide range
of optimization problems. The fundamental ideas
of Genetic Algorithm have been developed by John
Holand in late 1960s and early 1970s. Genetic Algo-
rithm is not a traditional optimization algorithm that
uses gradient or Hessians. It uses probabilistic search
method (Chong and Zak, 2001).
Genetic Algorithm is based on a biological pro-
cess that uses natural selection. Every iteration, the
parents are selected randomly from the current pop-
ulation and the offsprings of these parents are pro-
duced. This evolving procedure continues until the
algorithm reaches the optimal solution.
In this work, genetic algorithm is used to find the
parameters of the electrical battery model by using
DC-IR data. DC-IR data set is composed of DC inter-
nal resistance valuesat different time seconds depend-
ing on the temperature and SOC values. The first it-
eration starts with an initial population which is com-
posed of randomly generated individuals. Then, in
the next iteration, the result of the current population
is used. This iteration continues until the stopping
criteria (ε), the change in the fitness function is below
1e-6 (ε <1e-6), is reached. The fitness function is the
absolute value of the difference between the desired
voltage value (DC-IR values) and the voltage value
of the electrical battery model. It is given as in the
following:
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
578

f
fitnessfunction
=
u
desired,R
1sec
− u
fitted,R
1sec
+
u
desired,R
3sec
− u
fitted,R
3sec
+
u
desired,R
6sec
− u
fitted,R
6sec
+
u
desired,R
10sec
− u
fitted,R
10sec
(5)
The pseudo code of a general genetic algorithm is
given in the following (Man et al., 1996):
function A general genetic algorithm()
{
% Start with counter
k = 0;
% Randomly initialize the population
Initialize Population: P(t)
% Evaluate the fitness of the all
initial individuals inside the population
Evaluate: f(P(t))
Get the best solution
while (not terminate) (stopping criteria)
% Increase the counter
k = k + 1;
% Select parents from
the population for the offsprings
Selection Parents: P
′
(t)
% Create a combination of selected parents
Combination: P
′
new
(t)
% Mutate the offspring
Mutate: P
′
new
(t)
% Evaluate the offspring
Evaluate: f(P
′
new
(t))
% Select the best fits
Population: BestFit(P(t), P
′
new
(t))
}
3.2 Parameter Identification of
Electrical Battery Model based on
Nonlinear Least Squares Algorithm
In literature, Levenberg-Marquardt algorithm has
been used for decades for non-linear fitting problems.
It has been first introduced by Levenberg (Leven-
berg, 1944) and improved by Marquardt (Marquardt,
1963). Levenberg-Marquardt algorithm is one of the
non-linear least squares algorithms and it is obtained
by applying Levenberg-Marquardtmodification to the
Gauss-Newton method (Chong and Zak, 2001). In
this study, the aim is to minimize the following error:
e = (u
desired,R
1sec
− u
fitted,R
1sec
)
+ (u
desired,R
3sec
− u
fitted,R
3sec
)
+ (u
desired,R
6sec
− u
fitted,R
6sec
)
+ (u
desired,R
10sec
− u
fitted,R
10sec
)
(6)
The objective function is given as follows:
f
objective
=
1
2
N
∑
k=1
(e
k
(x))
2
(7)
where
x
(k+1)
= x
(k)
−
J(x)
T
J(x) + µ
k
I
−1
J(x)
T
r(x) (8)
where x = [τ
fast
,τ
slow
,R
fast
,R
slow
]
T
, J(x) is the Jaco-
bian matrix of e, I is the unity matrix, µ is the adjust-
ment factor (µ > 0), and k = 1,..., N.
In this study, the performance of the genetic algo-
rithm is compared with Levenberg-Marquardt algo-
rithm.
4 THE SIMULATION STUDIES
Battery modeling is critical in order to analyze the
performance and to estimate the states of a battery.
In this study, DC-IR data is used to obtain the param-
eters of a second order electrical model of a LFP type
battery.
The DC-IR data set is composed of DC internal
resistance values at different time seconds depending
on the temperature and SOC values. The data is ob-
tained at 25
◦
C considering different SOC values (be-
tween 10% and 90% with 10% increment). In DC-IR
data, the pulse that corresponds to the smallest pulse
time can be selected as the R
Ohmic
, ohmic resistance
of the battery model. Thus, the number of the esti-
mated parameters are reduced to four instead of five.
These parameters are the time constants and the re-
sistance values of the fast and slow dynamics of the
electrical battery model, τ
fast
, τ
slow
, R
fast
, and R
slow
,
respectively. In addition, charge and discharge state
of the battery is also taken into account for these pa-
rameters. These parameters are estimated by using
0 200 400 600 800 1000 1200
3
3.05
3.1
3.15
3.2
3.25
3.3
3.35
3.4
3.45
3.5
Time(sec)
Cell Voltage (V)
U
Cell Simulated
U
Cell Measured
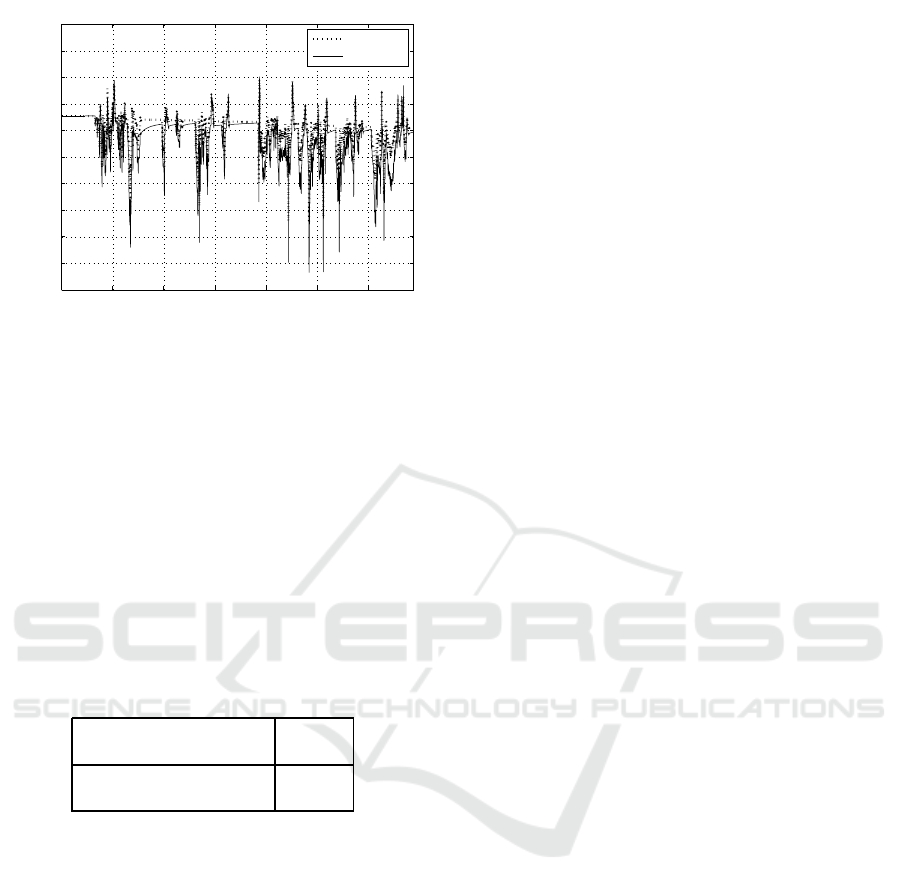
Figure 5: The comparison of the measured cell voltage with
the simulation result via Genetic Algorithm.
Parameter Identification of an Electrical Battery Model using DC-IR Data
579
0 200 400 600 800 1000 1200
3
3.05
3.1
3.15
3.2
3.25
3.3
3.35
3.4
3.45
3.5
Time(sec)
Cell Voltage (V)
U
Cell Simulated
U
Cell Measured
Figure 6: The comparison of the measured cell voltage with
the simulation result via Levenberg Marquardt Algorithm.
two curve fitting methods, namely, Genetic Algorithm
and Levenberg-Marquardt algorithm.
The obtained battery model is validated through
a driving cycle at 25
◦
C with an initial SOC value of
∼76%. The obtained results based on Genetic Algo-
rithm and Levenberg-Marquardt algorithm are given
in Figures 5 and 6, respectively. The obtained mean
absolute error (MAE) values are given in Table 2. As
it is observed, genetic algorithm has a less mean ab-
solute error value and has a better convergence com-
pared to the Levenberg-Marquardt algorithm.
Table 2: Comparison of Mean Absolute Error (MAE) val-
ues of the parameter identification methods.
MAE (V) (Genetic
Algorithm (GA)) 0.0081
MAE (V) (Levenberg
Marquardt Algorithm) 0.0198
5 CONCLUSION
In this study, DC-IR data is obtained from a pulse test
and it is used to obtain the parameters of an equiva-
lent electric circuit of a LFP type lithium-ion battery.
For this aim, two parameter identification algorithms
are used, namely; genetic algorithm and Levenberg-
Marquardt algorithm. The obtained results are ver-
ified through a driving cycle and the performances
of the these two algorithms are compared in terms of
mean absolute error (MAE) value.
The simulation studies indicate the utility of the
genetic algorithm. The future work in this area will
be to increase the order of the electrical battery model,
eg., a third order battery model and to obtain a more
accurate battery model.
ACKNOWLEDGEMENTS
The authors would like to acknowledge the support of
Ihsan Caner Boz, who worked as an intern for AVL
Research and Engineering, Istanbul, Turkey.
REFERENCES
Ansen, D., Garca, V. M., Gonzlez, M., Viera, J. C., Blanco,
C., and Antua, J. L. (2013). Dc internal resistance
during charge: Analysis and study on lifepo4 batter-
ies. In 2013 World Electric Vehicle Symposium and
Exhibition (EVS27), pages 1–11.
Chong, E. and Zak, S. (2001). An Introduction to Opti-
mization. John Wiley and Sons, New York, USA, 2nd
edition.
Dkhichi, F., Oukarfi, B., Fakkar, A., and Belbounaguia, N.
(2014). Parameter identification of solar cell model
using levenbergmarquardt algorithm combined with
simulated annealing. Solar Energy, 110:781 – 788.
Gasanova, T., Sergienko, R., Semenkin, E., and Minker, W.
(2014). Dimension reduction with coevolutionary ge-
netic algorithm for text classification. In 2014 11th In-
ternational Conference on Informatics in Control, Au-
tomation and Robotics (ICINCO), volume 01, pages
215–222.
Jossen, A. (2006). Fundamentals of battery dynamics. Jour-
nal of Power Sources, 154:530–538.
Kaabi, H. and Jabeur, K. (2015). Hybrid algorithm for
solving the multi-compartment vehicle routing prob-
lem with time windows and profit. In 2015 12th In-
ternational Conference on Informatics in Control, Au-
tomation and Robotics (ICINCO), volume 01, pages
324–329.
Khan, M. R., Mulder, G., and Mierlo, J. V. (2014). An
online framework for state of charge determination of
battery systems using combined system identification
approach. Journal of Power Sources, 246:629 – 641.
Khan, S., Rizvi, S. M. A., and Urooj, S. (2016). Equivalent
circuit modelling using electrochemical impedance
spectroscopy for different materials of sofc. In 2016
3rd International Conference on Computing for Sus-
tainable Global Development (INDIACom), pages
1563–1567.
Levenberg, K. (1944). A method for the solution of cer-
tain non-linear problems in least squares. Quarterly
of Applied Mathematics, 2(2):164–168.
Man, K. F., Tang, K. S., and Kwong, S. (1996). Genetic
algorithms: concepts and applications [in engineering
design]. IEEE Transactions on Industrial Electronics,
43(5):519–534.
Marquardt, D. W. (1963). An algorithm for least-squares
estimation of nonlinear parameters. Journal of
the Society for Industrial and Applied Mathematics,
11(2):431–441.
Mesbahi, T., Khenfri, F., Rizoug, N., Chaaban, K.,
Bartholomes, P., and Moigne, P. L. (2016). Dynami-
cal modeling of li-ion batteries for electric vehicle ap-
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
580

plications based on hybrid particle swarmneldermead
(psonm) optimization algorithm. Electric Power Sys-
tems Research, 131:195 – 204.
Nejad, S., Gladwin, D., and Stone, D. (2016). A systematic
review of lumped-parameter equivalent circuit models
for real-time estimation of lithium-ion battery states.
Journal of Power Sources, 316:183 – 196.
Ratnakumar, B., Smart, M., Whitcanack, L., and Ewell, R.
(2006). The impedance characteristics of mars explo-
ration rover li-ion batteries. Journal of Power Sources,
159(2):1428 – 1439.
Seaman, A., Dao, T.-S., and McPhee, J. (2014). A survey
of mathematics-based equivalent-circuit and electro-
chemical battery models for hybrid and electric vehi-
cle simulation. Journal of Power Sources, 256:410 –
423.
Sepasi, S., Ghorbani, R., and Liaw, B. Y. (2014). A novel
on-board state-of-charge estimation method for aged
li-ion batteries based on model adaptive extended
kalman filter. Journal of Power Sources, 245:337 –
344.
Sopov, E. and Ivanov, I. (2014). Design efficient tech-
nologies for context image analysis in dialog hci us-
ing self-configuring novelty search genetic algorithm.
In 2014 11th International Conference on Informatics
in Control, Automation and Robotics (ICINCO), vol-
ume 02, pages 832–839.
Talebitooti, R. and Torabi, M. (2016). Identification of tire
force characteristics using a hybrid method. Applied
Soft Computing, 40:70 – 85.
Waag, W., Fleischer, C., and Sauer, D. U. (2014). Critical
review of the methods for monitoring of lithium-ion
batteries in electric and hybrid vehicles. Journal of
Power Sources, 258:321–339.
Parameter Identification of an Electrical Battery Model using DC-IR Data
581
