
A Method for Traffic Sign Recognition with CNN using GPU
Alexander Shustanov and Pavel Yakimov
Samara National Research University, Moskovskoye shosse 34, Samara, Russia
Keywords: TensorFlow, Convolutional Neural Networks, Traffic Sign Recognition, Image Processing, Computer Vision,
Mobile GPU.
Abstract: In recent years, the deep learning methods for solving classification problem have become extremely popular.
Due to its high recognition rate and fast execution, the convolutional neural networks have enhanced most of
computer vision tasks, both existing and new ones. In this article, we propose an implementation of traffic
signs recognition algorithm using a convolution neural network. Training of the neural network is
implemented using the TensorFlow library and massively parallel architecture for multithreaded
programming CUDA. The entire procedure for traffic sign detection and recognition is executed in real time
on a mobile GPU. The experimental results confirmed high efficiency of the developed computer vision
system.
1 INTRODUCTION
Development of the technical level of modern mobile
processors enabled many vehicle producers to install
computer vision systems into customer cars. These
systems help to significantly improve the safety and
implement an important step on the way to
autonomous driving. Among other tasks solved with
computer vision, the traffic sign recognition (TSR)
problem is one of the most well-known and widely
discussed by lots of researchers. However, the main
problems of such systems are low detection accuracy
and high demand for hardware computational
performance, as well as the inability of some systems
classify the traffic signs from different countries.
Recognition of traffic signs is usually solved in
two steps: localization and subsequent classification.
There are many different localization methods
(Nikonorov et al., 2013), (Ruta et al., 2009),
(Belarossi et al., 2010). In papers (Fursov et al., 2013)
and (Yakimov, 2015), the authors proposed effective
implementations of the image preprocessing and
traffic signs localization algorithms, which performed
in real time. Using a modified Generalized Hough
Transform (GHT) algorithm, the solution allowed to
determine the exact coordinates of a traffic sign in the
acquired image. Thus, in the classification stage, the
simple template matching algorithm was used.
Combined with precise localization stage, this
algorithm showed the final results of 97.3% accuracy
of traffic sign recognition. The dataset from GTSDB
(Stallkamp et al., 2012) was used for training and
testing the developed algorithms. Figure 1 shows the
images for training the traffic signs recognition
algorithm and testing the localization algorithm.
Figure 1: Images from GTSDB (Stallkamp et al., 2012).
While testing the developed technology for
detecting and classifying traffic signs in real
conditions, i.e. using videos from cameras installed
on a windshield, the end-to-end technology showed
significant decrease in the efficiency. Studies have
shown that such a decrease arose because of too
strong variations in the illumination, contrast, and
angle of rotation in images of localized traffic signs.
Thus, a simple classification algorithm like template
matching was not able to achieve high-qaulity
recognition because of a limited set of predefined
templates. To improve the system performance, the
localization algorithm that has shown good results
42
Shustanov, A. and Yakimov, P.
A Method for Traffic Sign Recognition with CNN using GPU.
DOI: 10.5220/0006436100420047
In Proceedings of the 14th International Joint Conference on e-Business and Telecommunications (ICETE 2017) - Volume 5: SIGMAP, pages 42-47
ISBN: 978-989-758-260-8
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

can be combined with recognition using the
convolutional neural networks that have received
such a wide application in recent years (Zhu et al.,
2016), (LeCun and Servanet, 2011).
In this paper, we describe a revised end-to-end
technology for detecting and recognizing traffic signs
in real time. The developed system uses the speed
received from the vehicle. This allows you to predict
not only the presence of the object, but also the scale
and its exact coordinates in the neighboring frame.
Thus, the accuracy of detection increases, while the
computational complexity remains the same. The
classification of localized objects is implemented
using convolutional neural networks (CNNs). The use
of the GPU allows real-time processing of the frames
in the video sequence.
2 TRAFFIC SIGN
LOCALIZATION AND
TRACKING
The developed technology for traffic signs
recognition consists of three steps: image
preprocessing, localization and classification.
During image preprocessing, the HSV color space
is used to extract red and blue pixels from an image.
Due to errors in the process of images acquiring and
the presence of small colored objects, some point-like
noise occurs in the images after applying a threshold
filter. To address this point-like noise we apply the
algorithm described in (Fursov et al., 2013). Paper
(Yakimov, 2013) shows the effective implementation
of the algorithm for noise removal implemented using
CUDA. With GPUs, the acceleration reaches 60-80
times as compared with conventional executing on a
CPU. The frame size is 1920x1080 pixels. Using the
CUDA-enabled mobile GPU NVIDIA Jetson TK1
allows to preprocess one videoframe within 7-10 ms,
which satisfies the requirements of video processing
in real time.
Paper (Yakimov, 2015) addresses the algorithms
for detecting and tracking traffic signs. The method
for localization, which is a modification of the
generalized Hough transform, has been developed
considering the constraints on the time for processing
a single frame. The algorithm shows effective results
and functions well with the preprocessed images.
Tracking using the value of the vehicle current speed
has improved the performance of the system, as the
search area in the adjacent frames can be significantly
reduced. In addition, the presence of a sign in the
sequence of adjacent frames in predicted areas
significantly increases the confidence of correct
recognition. Classification, which is the final step,
ensures that the entire procedure has been executed
successfully.
3 TRAFFIC SIGN
CLASSIFICATION
3.1 Convolutional Neural Networks
Classification with artificial neural networks is a very
popular approach to solve pattern recognition
problems. A neural network is a mathematical model
based on connected via each other neural units –
artificial neurons – similarly to biological neural
networks. Typically, neurons are organized in layers,
and the connections are established between neurons
from only adjacent layers. The input low-level feature
vector is put into first layer and, moving from layer to
layer, is transformed to the high-level features vector.
The output layer neurons amount is equal to the
number of classifying classes. Thus, the output vector
is the vector of probabilities showing the possibility
that the input vector belongs to a corresponding class.
An artificial neuron implements the weighted
adder, which output is described as follows:
∑
,
(1)
where
is the j
th
neuron in the i
th
layer,
stands
for weight of a synapse, which connects the j
th
neuron
in the i
th
layer with the k
th
neuron in the layer i-1.
Widely used in regression, the logistic function is
applied as an activation function. It is worth noting
that the single artificial neuron performs the logistic
regression function.
The training process is to minimize the cost
function with minimization methods based on the
gradient decent also known as backpropagation. In
classification problems, the most commonly used
cost function is the cross entropy:
,
∑
(2)
Training networks with large number of layers, also
called deep networks, with sigmoid activation is
difficult due to vanishing gradient problem. To
overcome this problem, the ReLU function is used as
an activation function:
0, 0
,else
(3)
Today, classifying with convolutional neural
networks is the state of the art pattern recognition
A Method for Traffic Sign Recognition with CNN using GPU
43
method in computer vision. Unlike traditional neural
networks, which works with one-dimensional feature
vectors, a convolutional neural network takes a two-
dimensional image and consequentially processes it
with convolutional layers.
Each convolutional layer consists of a set of
trainable filters and computes dot productions
between these filters and layer input to obtain an
activation map. These filters are also known as
kernels and allow detecting the same features in
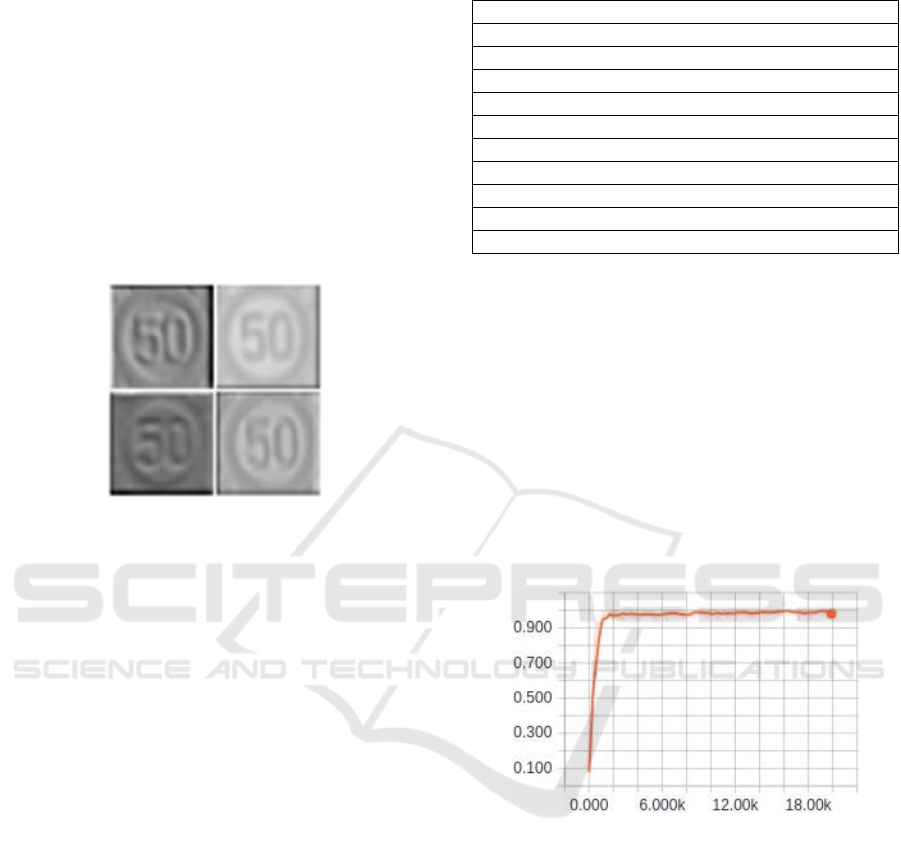
different locations. For example, Figure 2 shows the
result of applying convolution to an image with 4
kernels.
Figure 2: Input image convolution.
3.2 Proposed Implementation
To solve the traffic sign recognition task, we used the
deep learning library TensorFlow (Abadi et al.,
2016). Training and testing were implemented using
the dataset from GTSRB (Houben et al., 2013). The
developed method can classify the 16 most popular
traffic signs types.
Table 1 describes the developed network
architecture. It consists of several convolutional
layers, fully connected layers and one softmax layer.
Some convolutional layers have parameter stride
equal to 2. This parameter determines the stride of the
convolution sliding window, so layers with parameter
stride greater than 1 also combine the pooling
operation. The softmax layer normalizes the previous
layer output so that its output contains probabilities of
belonging to recognizable classes for the original
input image.
TensorFlow contains a set of tools to visualize
models at different abstraction levels down to low-
level mathematical operations. The common name of
these tools is TensorBoard. The presented model can
be divided into two stacked blocks: the convolutional
block and the fully connected block.
Table 1: Neural network architecture.
Layer
Convolutional, stride 2, kernel 7x7x4
Convolutional, stride 2, kernel 5x5x8
Convolutional, stride 2, kernel 3x3x16
Convolutional, stride 2, kernel 3x3x32
Convolutional, stride 1, kernel 2x2x16
Convolutional, stride 1, kernel 2x2x8
Convolutional, stride 1, kernel 2x2x4
Fully connected-64
Fully connected-16
Softmax
To train and evaluate the model, the initial dataset
was divided into the train and test datasets with ratio
80/20 correspondently. At the training stage, the
network processed the batch of 50 images from the
train dataset per one iteration. Every 100 iterations,
the intermediate accuracy was computed with batch
of 50 images from the test dataset. After successful
training, the accuracy was computed using all images
from the test dataset. Figure 3 shows the classification
accuracy growing with increasing the number of
training iterations. The graph shows that, starting with
the 2000
th
iteration, the network reaches the
classification accuracy above 0.9.
Figure 3: Classification accuracy changing with training
iterations.
4 EXPERIMENTAL RESULTS
As the paper emphasizes on an end-to-end solution to
real-time traffic sign localization and recognition, it
is necessary to evaluate preprocessing, localization
and classification performance. Paper (Yakimov,
2015) shows an effective implementation of
localization with preprocessing algorithms that
executes in 20 ms.
To evaluate the classification execution time, we
used the GPUs Nvidia GeForce GTX 650 and Nvidia
GeForce GT 650M, and CPU Intel Core i7 5500u.
Table 2 shows the results.
SIGMAP 2017 - 14th International Conference on Signal Processing and Multimedia Applications
44
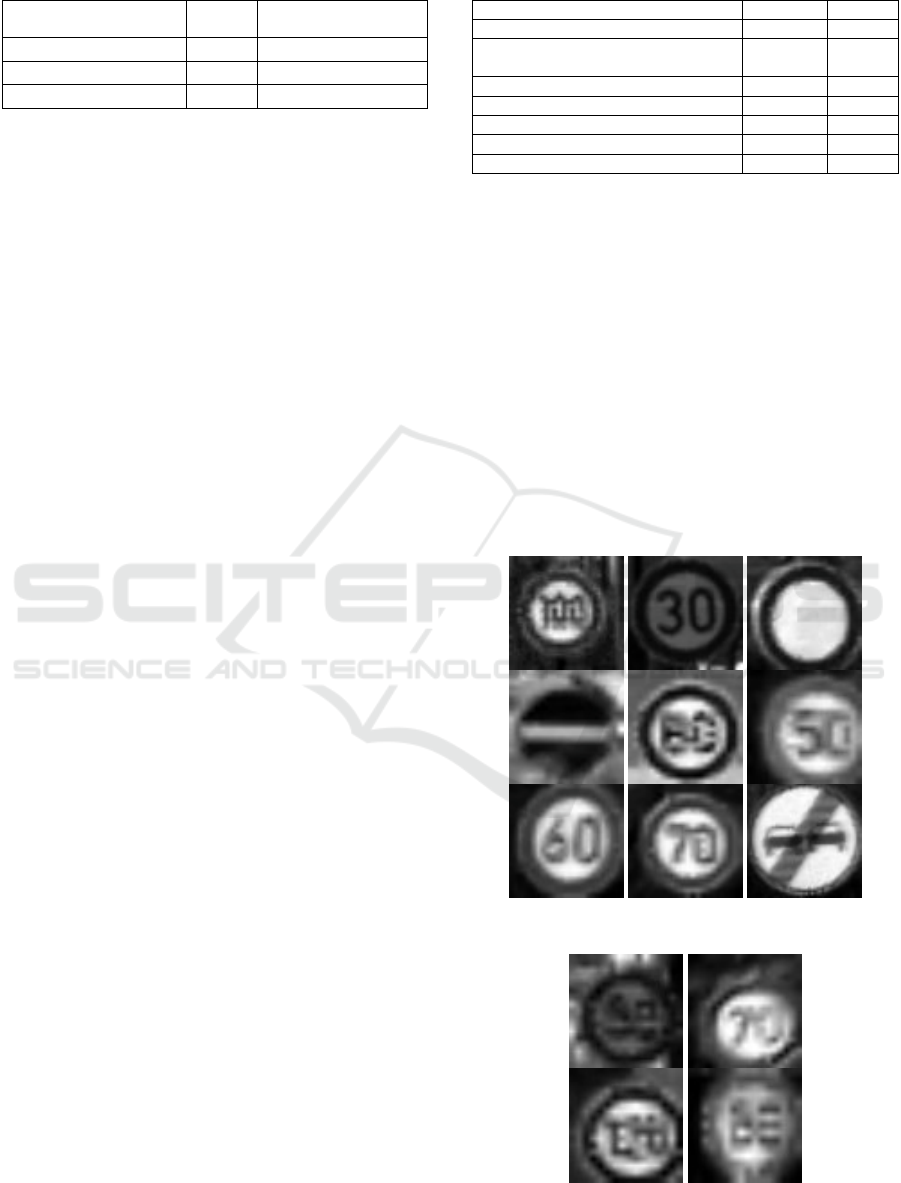
Table 2: CNN training and classifying execution time.
Hardware Training
Classifying an image
(64x64)
Nvidia GeForce GTX 650 7 min 0.05 ms
Nvidia GeForce GT 650M 12 min 0.14 ms
Intel Core i7 16 min 0.37 ms
To evaluate the localization and recognition
algorithms accuracy, we used the German Traffic
Sign Detection Benchmark (GTSDB) (Stallkamp et
al., 2012) and the German Traffic Sign Recognition
Benchmark (GTSRB) (Houben et al., 2013). They
contain more than 50,000 images with traffic signs
registered in various conditions. To assess the quality
of the sign localization, we counted the number of
images with correctly recognized traffic signs. When
testing the developed algorithms, we used only 9,987
images containing traffic signs of the required shape
and with red contours. The experiments showed
99.94% of correctly localized and detected
prohibitory and danger traffic signs.
Table 3 shows the resulting accuracy and
performance of the detection algorithms from
(Stallkamp et al., 2012), (Yakimov, 2015), (Aghdam
et al. 2016) and the method described in this paper.
The accuracy of all methods shown in the table
was obtained using the dataset GTSDB. The sliding
window method (Mathias et al., 2013) shows the best
result with 100% of accuracy. However, the described
in this paper modified GHT+CNN reaches the best
performance.
One of the most efficient methods for TSR using
GTSDB and GTSRB is the method using ConvNet
for both localizing and classifying traffic signs
(Aghdam et al. 2016). The authors show results
reaching precision equal to 99.89% when detecting a
sign and 99.55% when classifying it. Also, the
method can process 37.72 high-resolution images per
second. The method described in this paper shows
slightly better results in both precision and
performance, but it is difficult to compare FPS as
there is no description of the hardware used for
experiments.
Figure 4 shows images of traffic signs that were
successfully recognized by the proposed in this paper
CNN implementation. The picture shows that the
applied method gives good recognition results even
with traffic signs images, which are not easy to
recognize for a human.
Figure 4 shows images of traffic signs that were
successfully recognized by the proposed in this paper
CNN implementation. The picture shows that the
applied method gives good recognition results even
with traffic signs images, which are not easy to
recognize for a human.
Table 3: Accuracy and performance of TSR methods.
Method Accuracy FPS
Sliding window + SVN 100 % 1
Modified GHT with preprocessing
+ CNN (this paper)
99.94 % 50
ConvNe
t
99.55 % 38
Modified GHT with preprocessing 97.3 % 43
Modified GHT withou
t
preprocessing 89.3 % 25
Viola-Jones 90.81 % 15
HOG 70.33 % 20
However, the accuracy doesn’t reach 100 %.
Figure 5 shows the images of traffic signs that were
recognized incorrectly.
As it is seen in Figure 5, the quality of input
images strongly influences on the recognition rate. It
means that such high classification quality will not
always be obtainable when using the developed
algorithms in real world. However, all the mentioned
in Table 3 algorithms will suffer from this input
images quality.
The developed algorithm was also tested on the
video frames obtained in the streets using an Android
device Nvidia Shield Tablet built in to a car. Figure 6
shows the fragments of the original images with
marked road signs on them.
Figure 4: Successful classification.
Figure 5: Unsuccessful classification.
A Method for Traffic Sign Recognition with CNN using GPU
45
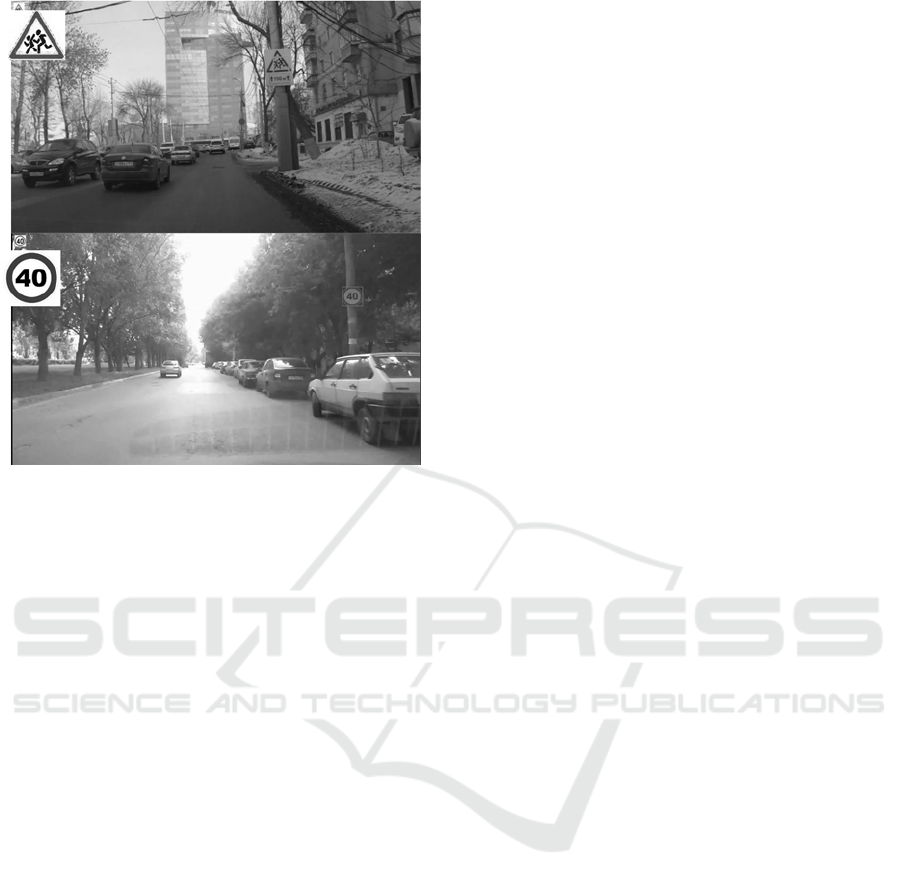
Figure 6: Localized and recognized traffic signs.
5 CONCLUSIONS
This paper considers an implementation of the
classification algorithm for the traffic signs
recognition task. Combined with preprocessing and
localization steps from previous works, the proposed
method for traffic signs classification shows very
good results: 99.94 % of correctly classified images.
The proposed classification solution is
implemented using the TensorFlow framework.
The use of our TSR algorithms allows processing
of video streams in real-time with high resolution, and
therefore at greater distances and with better quality
than similar TSR systems have. FullHD resolution
makes it posiible to detect and recognize a traffic sign
at a distance up to 50 m.
The developed method was implemented on a
device with Nvidia Tegra K1 processor. CUDA was
used to accelerate the performance of the described
methods. In future research, we plan to train the CNN
to consider more traffic sign classes and possible bad
weather conditions. In current, versions we
considered only daylight and good visibility.
ACKNOWLEDGEMENTS
This work was supported by the Russian Foundation
for Basic Research - Project # 16-37-60106
mol_a_dk.
REFERENCES
Shneier, M., 2005. Road sign detection and recognition.
Proc. IEEE Computer Society Int. Conf. on Computer
Vision and Pattern Recognition, pp. 215–222.
Nikonorov, A., Yakimov, P., Petrov, M., 2013. Traffic sign
detection on GPU using color shape regular
expressions. VISIGRAPP IMTA-4, Paper Nr 8.
Belaroussi, R., Foucher, P., Tarel, J. P., Soheilian, B.,
Charbonnier, P., Paparoditis, N., 2010. Road Sign
Detection in Images. A Case Study, 20th International
Conference on Pattern Recognition (ICPR), pp. 484-
488.
Ruta, A., Porikli, F., Li, Y., Watanabe, S., Kage, H., Sumi,
K., 2009. A New Approach for In-Vehicle Camea
Traffic Sign Detection and Recognition. IAPR
Conference on Machine Vision Applications (MVA),
Session 15: Machine Vision for Transportation.
Stallkamp J., Schlipsing M., Salmen J., Igel C., 2012. Man
vs. computer: Benchmarking machine learning
algorithms for traffic sign recognition. Neural
networks, vol. 32, pp. 323-332.
Houben, S., Stallkamp, J., Salmen, J., Schlipsing, M., Igel,
C.: Detection of Traffic Signs in Real-World Images:
The {G}erman {T}raffic {S}ign {D}etection
{B}enchmark. In: Proc. International Joint Conference
on Neural Networks, 2013.
Fursov, V., Bibkov, S., Yakimov, P., 2013. Localization of
objects contours with different scales in images using
Hough transform [in Russian]. Computer optics, vol.
37(4), pp. 502-508.
Yakimov, P., 2015. Tracking traffic signs in video
sequences based on a vehicle velocity [in Russian].
Computer optics, vol. 39(5), pp. 795-800.
Zhu, Z., Liang, D., Zhang, S., Huang, X., Li, B., Hu, S.,
2016. Traffic-Sign Detection and Classification in the
Wild. Proceedings of CVPR, pp. 2110-2118.
LeCun, Y., Sermanet, P., 2011. Traffic Sign Recognition
with Multi-Scale Convolutional Networks.
Proceedings of International Joint Conference on
Neural Networks (IJCNN'11).
Yakimov, P., 2013. Preprocessing of digital images in
systems of location and recognition of road signs [in
Russian]. Computer optics, vol. 37 (3), pp. 401-405.
M. Abadi, A. Agarwal, P. Barham, E. Brevdo, Z. Chen, C.
Citro, G. S. Corrado, A. Davis, J. Dean, M. Devin, S.
Ghemawat, I. J. Goodfellow, A. Harp, G. Irving, M.
Isard, Y. Jia, R. Jozefowicz, L. Kaiser, ´ M. Kudlur, J.
Levenberg, D. Mane, R. Monga, S. Moore, D. G.
Murray, C. Olah, M. Schuster, J. Shlens, B. Steiner, I.
Sutskever, K. Talwar, P. A. Tucker, V. Vanhoucke, V.
Vasudevan, F. B. Viegas, O. Vinyals, P. Warden, M.
Watten- ´ berg, M. Wicke, Y. Yu, and X. Zheng.
TensorFlow: Large-scale machine learning on
heterogeneous distributed systems. arXiv preprint,
1603.04467, 2016. arxiv.org/abs/1603.04467.
Software available from tensorflow.org.
Mathias, M., Timofte, R., Benenson, R., Gool, L., 2013.
Traffic sign recognition - how far are we from the
SIGMAP 2017 - 14th International Conference on Signal Processing and Multimedia Applications
46

solution? Proceedings of IEEE International Joint
Conference on Neural Networks.pp. 1-8.
Aghdam, H., Heravi, E., Puig, D., 2016, A practical
approach for detection and classification of traffic signs
using Convolutional Neural Networks, Robotics and
Autonomous Systems, Vol. 84, pp. 97-112.
A Method for Traffic Sign Recognition with CNN using GPU
47
