
Implementation of the Algorithms to Retrieve the Data About Local
and Global Wireless Networks from the Telematics Map
Serge Popov, Maxim Sharagin, Vadim Glazunov and Mikhail Chuvatov
Peter the Great St. Petersburg Polytechnic University, Saint-Petersburg, Russia
Keywords:
Connected Vehicle, Wireless Networks, Wi-Fi, Multiprotocol Unit, Spatial SQL Queries, Telematics Map.
Abstract:
This paper describes implementation and research of the algorithms to select the data about surrounding wire-
less networks from the moving vehicle. The data are retrieved from the telematics map, which is a cloud
service containing the data about all the available wireless networks in the region. The paper contains the
description of three scenarios of data extraction, relational queries to the telematics map which serve these
scenarios, and the experiment to test the data extraction from the cloud service under real road environment.
The experiment has shown that the time needed to extract the data about available local and global wireless
networks does not exceed 0.2 sec, which is acceptable for the tasks of scheduling the wireless connections
between the vehicle and the cloud services during the whole route. The results of this work may be used to
retrieve the list of available wireless networks in the algorithms of intelligent scheduling of bidirectional data
transmission for the connected vehicles.
1 INTRODUCTION
Modern intelligent transportation system (ITS) con-
sider each vehicle as an active source and destina-
tion for data flows containing traffic behaviour infor-
mation, which is important in prevention of road ac-
cidents, reduction of emissions, decreasing the time
spent by the driver and passengers in traffic jams. To
achieve these goals each vehicle keeps bidirectional
connection between the vehicle and cloud services
located outside of the car (Zaborovskiy et al., 2013;
Annese et al., 2011; Kutscher and Ott, 2006), it al-
lows to continuously obtain data about surrounding
road conditions, local traffic fluctuations, unwanted
weather changes. It is not an easy task to provide the
consistent connection because of large number and
dynamic behaviour of the vehicles on the city roads,
short range of local wireless technologies, presence of
the areas without cellular coverage, variability of the
network traffic among the vehicles. The fundamental
approach to this problem is to continuously retrieve
the data about possible connection points not only
near the current vehicle’s location, but at any point of
the selected area. Selection of the current geographic
region networks provides a combination of data man-
agement technologies of the telematics map and the
multiprotocol unit (Glazunov et al., 2015). The pro-
posed idea allows to implement the technologies of
gathering and aggregation of data about available
wireless networks of the region (Mikhail et al., 2015).
The first part of our paper contains the review of the
related works. In the second part we describe three
scenarios for the method of selection of the available
wireless networks from the telematics map and the
algorithm of communication between the vehicle and
the cloud service. The third part covers the imple-
mentation of spatial queries to the relational storage
of the telematics map. The fourth part includes the
description of the testbed, description of the experi-
ment, and the result of trials on data retrieval from
the moving vehicle. The proposed approach allows to
select the potentially available wireless networks for
arbitrary number of vehicles, thus providing flexibil-
ity to schedule the data transmission to or from the
connected vehicle.
2 RELATED WORKS AND THE
GOAL OF THE RESEARCH
At the initial stage in the development of vehicle net-
works the problem of efficient selection of the access
points was solved by specifying positions of these
points and sequentially switching among them using
static algorithm (Deshpande et al., 2009). The prob-
Popov, S., Sharagin, M., Glazunov, V. and Chuvatov, M.
Implementation of the Algorithms to Retrieve the Data About Local and Global Wireless Networks from the Telematics Map.
DOI: 10.5220/0006470504470452
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 2, pages 447-452
ISBN: Not Available
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
447

lem of continuous uninterrupted access to the network
was solved by using multiple Wi-Fi interfaces and
connecting them to different access points simultane-
ously (Annese et al., 2011). Active development of
the ”connected vehicle” technology required to de-
ploy the large amount of road infrastructure equip-
ment, and the continuous connection with these de-
vices must be maintained. These connections are
the important part in tasks of fog (Jain and Singhal,
2016) and cloud (Ko et al., 2016) computing, thus re-
quiring self-organizing sensor, ad-hoc, or mesh net-
works. The other option is to deploy the additional
road infrastructure equipment which communicates
with the vehicles using the WAVE protocol and ad-
hoc technologies (Salahuddin et al., 2015), it is also
possible to use smartphones of drivers and passengers
for continuous access to cloud services (Wahlstr
¨
om
et al., 2016). But in this case the problem of effi-
cient communication between the vehicle networks
and road infrastructure still exists. To address that
and find the suitable connection there are local static
and dynamic algorithms of selection of the best avail-
able network. These algorithms combine the wireless
networks scan mode and connection mode to work
within the selected network (Mouton et al., 2013).
Statistical methods of selection of the best available
network allow to analyze the connection time for each
network and to choose the one which provides the
longest active connection (Mostafa et al., 2011). To
achieve even better results there are fuzzy logic meth-
ods to select the best networks based on the driving
parameters (Ndashimye et al., 2016), or by distribut-
ing the vehicles among the networks based on the
QoS model (Xi et al., 2014). We propose the ap-
proach that allows to retrieve the data about available
wireless networks in case when the number of access
points, their status, and number of vehicles constantly
changes. The goal of this research is to compute and
analyze the execution time of the queries that retrieve
data about the telematics resources of the region. We
consider three different scenarios while acquiring the
data to predict the telematics environment on board of
the vehicle.
3 IMPLEMENTATION OF
SCENARIOS TO RETRIEVE
THE LIST OF NETWORKS
FROM THE MOVING VEHICLE
The data upload and download may occur when the
vehicle is moving on the route. When these data flows
appear we should select the best available point of
connection to the wireless network and perform the
transmission. To select the specific point we take into
account the set of high-level parameters, such as: link
bandwidth, time when the vehicle is in the coverage
of the network, traffic cost, connection establishment
time. However, we can redistribute the incoming and
outgoing traffic if we know the data size, the traf-
fic flows priorities, the time when these data should
be ready for use, and the vehicle’s route. Then the
data management scenarios could be local, when we
request the data in the area close to the vehicle, or
global, when we work with the data relevant for the
whole route. Based on this idea we can define three
basic scenarios of retrieving the data by the moving
vehicle from the telematics map when driving in city
or highway cycles: local, which is based on the vehi-
cle’s current position, and global, which is based on
the vehicle’s proposed route:
1. When the vehicle is on the parking or in the
garage, or when the vehicle is moving at a low
speed, or if the network suitable for scheduled
data transmission is present at some place on the
route - acquire the list of networks inside the rect-
angular area close to the vehicle and sort this list
by signal level or by the coverage in the selected
area.
2. When we schedule the continuous connection of
the vehicle to the wireless networks throughout
the route - acquire the list of networks which cover
the whole route of the vehicle, sequentially switch
among them to be continuously connected to the
cloud services.
The picture shows a graphic representation of
scenarios1.
To implement these scenarios we set up the telem-
atics map cloud service and propose the method to
extract the data in form of relational queries to the
database. The database schema is described in work
(Glazunov et al., 2015).
a) Scenario 1: obtaining data on the telematics en-
vironment around the vehicle. The initial data
for determining the telematic situation is the cur-
rent position of the vehicle, getting from the GPS
global positioning system in the WGS84 system,
and the size of the area for requesting data about
wireless networks. The size of the area is deter-
mined by factors such as the driving direction of
the vehicle and the sensitivity of the wireless re-
ceiver. The calculation of the area of interest for
determining the wireless networks is carried out
so that the data on the situation are available the
nearest 20s or 200m around the vehicle. The re-
quest returns the SSID of the wireless network and
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
448

Figure 1: Graphic representation of scenarios to extract the
data about the wireless networks of the region.
the percentage of the area of the area of interest
on which it will be available, taking into account
the sensitivity of the receiver in the vehicle. The
vehicle on-board software can select the best net-
work from the list and connect to it to receive or
transmit data.
b) Scenario 2: obtaining data on the wireless net-
works situation on the planned route. The ini-
tial data for the execution of the scenario is the
planned route of the vehicle’s movement that to
be received from the car’s navigation system or
the user’s smartphone. The planned route is deter-
mined by a set of points in the WGS84 coordinate
system and the times at which the vehicle is sup-
posed to be in this position. The configuration of
the area of interest is determined by factors such
as the planned route of the vehicle and the sen-
sitivity of the wireless receiver. The calculation
of the area of interest for determining the wire-
less networks is carried out so that the data on the
situation are available the nearest 20s and 200m
around the vehicle. The request returns the List of
the wireless networks, the percentage of the area
of the area of interest on which it will be available
and the position on the planned route, from where
this network is available. The wireless network
availability point is calculated taking into account
the sensitivity of the vehicle receiver.
The presented algorithms are implemented as
client-server application on the testbed with mul-
tiprotocol nodes (Popov et al., 2014). A multipro-
tocol server includes: WiFi, LTE transceivers and
the GPS positioning receiver. Also navigation
Algorithm 1: The procedure for requesting data
about wireless networks around the vehicle.
Data:
- Wi-Fi receiver sensitivity — level;
- Length the area of interests L
area
;
- Latitude, longitude of vehicle — lat
x
, lon
x
, t
x
;
- Data new acquisition area (lat
1
, lon
1
;lat
2
, lon
2
).
Result: Net{SSID, S} list of networks
Map{SSID, level},
1 , sorted by area of coverage.
2 while (new request of wireless network list) do
3 begin
4 Get data from GPS receiver
5 (lat
x
, lon
x
) ← GetGPSPosition()
6 Calculate the area of interest arround
vehicle
7 (lat
1
, lon
1
;lat
2
, lon
2
) ←
GetArea(L
area
, level)
8 Create the SQL Query
9 SELECT SSID, S
10 FROM map NATURAL JOIN network
11 NATURAL JOIN network value
12 WHERE network level ¡ level and
13 latitude ¿ lat1 AND latitude ¡ lat2 AND
14 longitude ¿lon1 AND longitude ¡ lon2
15 Run the SQL query
16 Query result ← Query
17 Save a network list
18 Net{SSID, S} ← Query result
19 end
20 end
system with a route-laying function are connected
with multiprotocol server in the vehicle. The data
from the hardware, sent by HTTP protocol to the
cloud service of the telematics map over available
wireless networks. The requests received in the
cloud service and its results are send back to the
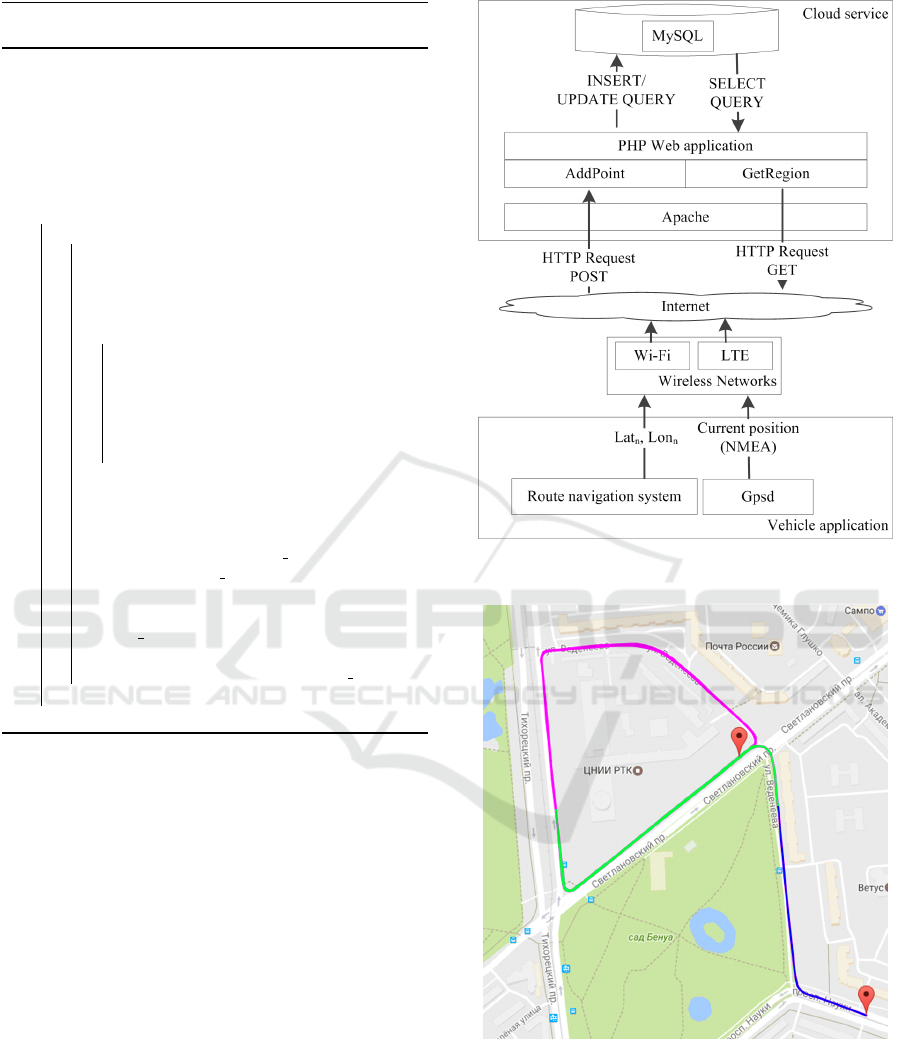
vehicle. Schema of data streams under the dis-
play of 2. Data streams are generated inside the
vehicle from the GPSd server includes NMEA co-
ordinates. The navigation system (Yandex Maps)
generates a traffic route and sends merged packet
with data to the cloud service via a HTTP POST
request. On the server, the received data is pro-
cessed by the WEB-application and accumulated
in the MySQL database. The server returns a list
of the networks sorted by the coverage area of the
networks relative to the route of the vehicle.
Implementation of the Algorithms to Retrieve the Data About Local and Global Wireless Networks from the Telematics Map
449
Algorithm 2: The procedure for requesting data
about wireless networks on the vehicle route.
Data:
- Wi-Fi receiver sensitivity — level;
- Latitude, longitude and time of vehicle — lat
x
, lon
x
, t
x
;
- Planned vehicle route — R(lat
area
, lon
area
).
Result: List of networks Map{SSID, S, {lat, lon}},
sorted by area of coverage and the point
where this network can become available
1 . while (new request of wireless network list) do
2 begin
3 Get data from GPS receiver
4 (lat
x
, lon
x
) ← GetGPSPosition()
5 Get data from navigation system
6 R(lat
x
, lon
x
) ← GetRoute()
7 while (for each point from R) do
8 Calculate the area of interest arround
point
9 (lat
1
, lon
1
;lat
2
, lon
2
) ←
GetArea(R(lat
area
, lon
area
, level)
10 Extend the query to a new area
11 Area(lat, lon) ← (lat
1
, lon
1
;lat
2
, lon
2
)
12 end
13 Create the SQL Query
14 SELECT SSID, S, lat, lon
15 FROM map NATURAL JOIN network
16 NATURAL JOIN network value
17 WHERE network level ¡ level and
18 (latitude AND latitude) in Area(lat, lon)
19 Run the SQL Query
20 Query result ← Query
21 Save a network list
22 Map{SSID, S, {lat, lon}} ← Query result
23 end
24 end
4 REALIZATION AND TESTING
THE ALGORITHMS TO
RETRIEVE DATA FROM THE
TELEMATICS MAP
The goal of the experiment is to obtain data on the
average time execution of two scenarios for obtaining
data about wireless networks from the vehicle in the
real traffic situation. The trajectory of vehicle driving
during the experiments is shown in the figure 3. Blue
indicates the part of actual trajectory, green - planned
for the request of the situation.
To implement the first scenario, the vehicle moved
along the path and at a frequency of 1Hz and re-
quested data on the wireless networks from the telem-
atics map. The time of the beginning of the transfer of
the query and the end of data reception is registered
and accepted as full time of the query execution.
To implement the second scenario, the vehicle
Figure 2: Data flows transmitted between the vehicle and
the cloud service.
Figure 3: Trajectory of vehicle movement in the process of
receiving data from the telematics card.
moves along a pre-selected path and requests data on
the telematics situation for the next 30 seconds of the
planned route. The request was repeated at a fre-
quency of 0.2Hz. The query execution time is reg-
istered in the same way as in scenario one.
In the table 1 the parameters and constants of the
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
450

experiment on the execution of query’s to the telem-
atics card are presented.
Table 1: Parameters and constants of the experiment.
Parameters, constants Values
Data transmission technologies 802.11n/b/g, LTE
System software Apache, PHP,
Mysql
Operstion system Debian Linux
Scenario 1
Query frequency, Hz 1
Number of query, pcs 5000
Scenario 2
Query frequency, Hz 0.2
Number of query, pcs 4900
Length route for query, point 30-60
Data allows analyzing the distribution of the exe-
cution time requests to the telematics map cloud ser-
vice from the vehicle. Such a query frequency pro-
vides the vehicle with real-time data. The figure 4
shows the distribution of the query execution time
when data is fetched around the vehicle. It can be
seen from the distribution that a larger number of re-
quests are executed in a time less than 0.2s, which al-
lows receiving data with frequency up to 1Hz, which
is comparable to real-time data acquisition.
Figure 4: The distribution of time execution of queries
about telematics resources around vehicle.
The figure 5 shows the distribution of the query
execution time for the planned vehicle route. The dis-
tribution shows the predicted traffic route of at least
30 seconds, the query is no more than 0.3s.
Figure 5: The distribution of time execution of queries
about telematics resources on the vehicle route.
5 CONCLUSION AND FUTURE
WORK
The article describes the technology of interaction of
a vehicle with a telematics card for obtaining data
about wireless networks around the car and on the
whole planned route of the vehicle. The realization of
the prototype of cloud service and vehicle on-board
software demonstrated the efficiency of the technol-
ogy. As a result of the conducted experiments it was
shown that the query execution time averages 0.2 s
for the local scenario and 0.3s for the scenario with
the intended path. This allows you to update data on
available networks on a vehicle with a frequency of
up to 1Hz or to increase the length of the intended
path. Results can be used for choosing and direct con-
nection of a vehicle in the current point or for use as
networks list for intellectual algorithms of data trans-
mission from the vehicle. Further of this work may
be increase in the number of connected vehicles in the
real traffic situation, the optimization of the frequency
of the execution of query and lengths of the planned
route, the integration with the subsystem of planning
the telematics traffic on the board. Alternative way of
future research is the use the modeling system such as
SUMO or NS-3 for study the high intensivity network
traffic with the real and virtual vehicles.
ACKNOWLEDGMENTS
The research is supported by the government contract
of Russian Federation #2.9198.2017/8.9.
Implementation of the Algorithms to Retrieve the Data About Local and Global Wireless Networks from the Telematics Map
451

REFERENCES
Annese, S., Casetti, C., Chiasserini, C. F., Maio, N. D.,
Ghittino, A., and Reineri, M. (2011). Seamless con-
nectivity and routing in vehicular networks with in-
frastructure. IEEE Journal on Selected Areas in Com-
munications, 29(3):501–514.
Deshpande, P., Kashyap, A., Sung, C., and Das, S. R.
(2009). Predictive methods for improved vehicular
wifi access. In Proceedings of the 7th International
Conference on Mobile Systems, Applications, and Ser-
vices, MobiSys ’09, pages 263–276, New York, NY,
USA. ACM.
Glazunov, V., Kurochkin, L., Popov, S., and Chuvatov,
M. (2015). Prototype of the telematics map cloud
service. In Open Innovations Association (FRUCT),
2015 17TH Conference of, pages 50–55.
Jain, A. and Singhal, P. (2016). Fog computing: Driving
force behind the emergence of edge computing. In
2016 International Conference System Modeling Ad-
vancement in Research Trends (SMART), pages 294–
297.
Ko, B., Liu, K., and Son, S. H. (2016). Towards efficient
data services in vehicular networks via coopera-
tive infrastructure-to-vehicle and vehicle-to-vehicle
communications. In 2016 Intl IEEE Conferences
on Ubiquitous Intelligence Computing, Advanced
and Trusted Computing, Scalable Computing and
Communications, Cloud and Big Data Computing,
Internet of People, and Smart World Congress
(UIC/ATC/ScalCom/CBDCom/IoP/SmartWorld),
pages 82–89.
Kutscher, D. and Ott, J. (2006). Service maps for hetero-
geneous network environments. In 7th International
Conference on Mobile Data Management (MDM’06),
pages 27–27.
Mikhail, C., Vadim, G., Michail, K., and Serge, P. (2015).
Methods of interaction between multiprotocol unit
and telematics map cloud service. In Proceedings of
the 1st International Conference on Vehicle Technol-
ogy and Intelligent Transport Systems - Volume 1: VE-
HITS,, pages 161–166.
Mostafa, A., Vegni, A. M., Singoria, R., Oliveira, T., Little,
T. D. C., and Agrawal, D. P. (2011). A v2x-based ap-
proach for reduction of delay propagation in vehicular
ad-hoc networks. In 2011 11th International Confer-
ence on ITS Telecommunications, pages 756–761.
Mouton, M., Castignani, G., Frank, R., Codeca, L., and
Engel, T. (2013). On the evaluation of make-before-
break handovers in urban wifi networks for moving
vehicles. In 2013 10th Annual Conference on Wireless
On-demand Network Systems and Services (WONS),
pages 170–177.
Ndashimye, E., Sarkar, N. I., and Ray, S. K. (2016). A
novel network selection mechanism for vehicle-to-
infrastructure communication. In 2016 IEEE 14th Intl
Conf on Dependable, Autonomic and Secure Com-
puting, 14th Intl Conf on Pervasive Intelligence and
Computing, 2nd Intl Conf on Big Data Intelligence
and Computing and Cyber Science and Technology
Congress(DASC/PiCom/DataCom/CyberSciTech),
pages 483–488.
Popov, S., Kurochkin, M., Kurochkin, L. M., and Glazunov,
V. (2014). Hardware and Software Equipment for
Modeling of Telematics Components in Intelligent
Transportation Systems, pages 598–608. Springer In-
ternational Publishing, Cham.
Salahuddin, M. A., Al-Fuqaha, A., and Guizani, M. (2015).
Software-defined networking for rsu clouds in support
of the internet of vehicles. IEEE Internet of Things
Journal, 2(2):133–144.
Wahlstr
¨
om, J., Skog, I., and H
¨
andel, P. (2016). Smartphone-
based vehicle telematics - A ten-year anniversary.
CoRR, abs/1611.03618.
Xi, L., Heli, Z., and Quansheng, X. (2014). Optimal ac-
cess scheme for mobile vehicular small cells in lay-
ered heterogenous networks. In 2014 4th IEEE In-
ternational Conference on Network Infrastructure and
Digital Content, pages 46–50.
Zaborovskiy, V., Lukashin, A., Popov, S., and Vostrov, A.
(2013). Adage mobile services for its infrastructure.
In ITS Telecommunications (ITST), 2013 13th Inter-
national Conference on, pages 127–132.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
452
