
Analysis of a Batch Strategy for a Master-Worker Adaptive Selection
Algorithm Framework
Christopher Jankee
1
, S
´
ebastien Verel
1
, Bilel Derbel
2
and Cyril Fonlupt
1
1
Universit
´
e du Littoral C
ˆ
ote d’Opale, LISIC, France
2
Universit
´
e Lille 1, LIFL – CNRS – INRIA Lille, France
Keywords:
Master-Worker Architecture, Adaptive Selection Strategy.
Abstract:
We look into the design of a parallel adaptive algorithm embedded in a master-slave scheme. The adaptive
algorithm under study selects online and in parallel for each slave-node one algorithm from a portfolio. In-
deed, many open questions still arise when designing an online distributed strategy that attributes optimally
algorithms to distribute resources. We suggest to analyze the relevance of existing sequential adaptive strate-
gies related to multi-armed bandits to the master-slave distributed framework. In particular, the comprehensive
experimental study focuses on the gain of computing power, the adaptive ability of selection strategies, and the
communication cost of the parallel system. In fact, we propose an adaptive batch mode in which a sequence
of algorithms is submitted to each slave computing node to face a possibly high communication cost.
1 INTRODUCTION
In this work, we target black-box optimization prob-
lems for which no information can be known before-
hand. There is no explicit hypothesis on these prob-
lems such as an explicit analytic expression of the
fitness function, regularity, gradient properties, etc.
This wide range of problems include optimization
scenarios that require extensive numerical simulation.
For example, some engineering design problems use a
simulator of the physic to optimize criteria of interest
for the designed system (Muniglia et al., 2016) (Ar-
mas et al., 2016). From a practical, as well as from a
theoretical, point of view, in a black-box optimization
scenario, the choice of the relevant algorithmic com-
ponents according to the problem to solve is an open
issue, and an active domain of research (Baudi
ˇ
s and
Po
ˇ
s
´
ık, 2014). Moreover, when a large scale parallel
compute environment is available, an optimization al-
gorithm implies additional design challenges to make
an effective cooperation between parallel resources.
Thus, the paper investigates the online selection of al-
gorithmic components in a master-worker framework
in order to take full benefits from the compute power
in a black-box optimization scenario.
From the early works of Grefenstette (Grefen-
stette, 1986) to recent works (Kotthoff, 0 30) and
many other researchers (Kunanusont et al., 2017),
the parameters setting or the algorithm selection, is
a recurrent topic in evolutionary computation due to
its crucial importance in practice. In this work, we
are interested in adaptive algorithm selection; which
consists in the online choice, among a number of
alternatives stored beforehand in a portfolio, of an
appropriate algorithm to execute next according to
the current state of the search. Unlike the off-line
tuning of parameters (Eiben et al., 2007) which se-
lects an effective set of parameters (that is algorithmic
components) before the execution of the optimization
method, the online setting, also called control con-
tinuously selects an algorithm all along the optimiza-
tion process using the feedback from the optimiza-
tion algorithm being executed (Fialho et al., 2010;
Baudi
ˇ
s and Po
ˇ
s
´
ık, 2014). Hence, online algorithm se-
lection can be viewed as an adaptive optimization al-
gorithm which follows the multi-armed bandit frame-
work where the arms are the algorithms of the portfo-
lio (DaCosta et al., 2008). The adaptive selection is
then performed as follows. A reward is computed ac-
cording to the performance observed when previously
executing an algorithm.
As previously noticed, numerous black-box real
world optimization problems, such as in engineer-
ing design, are computationally expensive, e.g., one
fitness function evaluation can take several min-
utes (Muniglia et al., 2016). Thus, such problems
can take benefit of the new compute facilities of-
fered by large scale parallel platforms (clouds, pay-
as-you-go, etc.). At the same time, it opens new re-
search perspectives to develop original and more ro-
bust optimization methods. Several models of paral-
lel evolutionary algorithms have been investigated for
Jankee C., Verel S., Derbel B. and Fonlupt C.
Analysis of a Batch Strategy for a Master-Worker Adaptive Selection Algorithm Framework.
DOI: 10.5220/0006504203130320
In Proceedings of the 9th International Joint Conference on Computational Intelligence (IJCCI 2017), pages 313-320
ISBN: 978-989-758-274-5
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

parallel compute platform: from fine-grained (cellu-
lar model) to coarse grain (island) model (Tomassini,
2005). The centralized Master-Worker (M/W) archi-
tecture is the general research context of this work.
Each worker computes a batch of actions scheduled
by the master (i.e. mainly the evaluation of candi-
dates solutions), and the master collects the local re-
sults from the workers, again mainly the fitness value
of the best local solution, and coordinates the next ac-
tions to send to each worker. It is worth-noticing that
this framework is often adopted in practice, not only
due to the simplicity of deploying it over a real test
bed, but also due to its high accuracy when dealing
with computationally expensive optimization prob-
lems (Dasgupta and Michalewicz, 2013; Harada and
Takadama, 2017).
In this context, we argue that an adaptive selection
method of algorithms in a master-worker approach re-
quires specific mechanisms in order to achieve opti-
mal performances. In a sequential approach, the re-
ward of each possible algorithm in the portfolio is up-
dated according to the performance of the algorithm
executed previously in the last iteration by one single
process. In an M/W approach, the reward can be up-
dated using the set of performances observed by the
set of distributed workers. Nevertheless, two careful
design components of the reward method has to be
taken into account. First, if a batch of algorithms is
executed by each worker node at each round, an ac-
curate function to compute the local reward has to be
defined. In addition, a global reward function is also
required to aggregate the set of local rewards and to
assign a reward of each algorithm from the portfo-
lio. Besides, we can differentiate two types of parallel
adaptive strategy: when adopting a homogenous strat-
egy, all workers will execute the same algorithm at
each round, or when adopting a heterogeneous strat-
egy, the workers can execute different algorithms even
in the case where a batch of algorithms is executed at
each round by each worker. Several existing machine
learning schemes have been used and studied previ-
ously in the sequential setting (Fialho et al., 2010),
as well as in the decentralized island model (Derbel
and Verel, 2011; Jankee et al., 2015). However, to
our best knowledge, the analysis of online selection
strategies have not been investigated within an M/W
framework. Indeed, the M/W framework is more suit-
able to understand the tradeoff between an optimal
global selection at the parallel system level and an op-
timal local selection of the most accurate algorithms
at the worker level. In an M/W framework, the master
node has a global view of the system which enables to
define a global reward function and a global selection
approach. This allows us to focus on the important
selection strategy at the master level; and to propose
new dedicated selection mechanisms. For instance,
we deeply analyze a batch strategy which submits a
sequence of actions to each worker (e.g. several fit-
ness evaluation obtained by a set of algorithms). Such
framework provides a way to deal with the tradeoff
between communication and computation costs (fit-
ness evaluation) as well as the adaptive efficiency of
such strategy.
To summarize, we introduce a M/W algorithm se-
lection framework contributing to the solving of the
following questions:
(i) How to extend a selection strategy in a batch-
oriented distributed framework ?
(ii) What is the impact of a batch framework on the
performance of selection strategies ?
(iii) How does the batch framework affects the cost of
communication?
Our M/W framework is evaluated using a tun-
able benchmark family and a simulation-based ex-
perimental procedure in order to abstract away the
technical implementation issues, and instead provide
a fundamental and comprehensive analysis of the ex-
pected empirical parallel performance of the underly-
ing adaptive algorithm selection.
The rest of the paper is organized as follows. In
Section 2, we review some related works.
In Section 3, the design components of our M/W
adaptive framework is described in detail. In Sec-
tion 4, we report our main experimental findings. In
Section 5, we conclude the paper and discuss future
research directions.
2 RELATED WORKS
In the following, we provide an overview of related
studies on the algorithm selection problem in the se-
quential and distributed setting, as well as a brief sum-
mary of exiting optimization benchmark problems de-
signed at the aim of evaluating their dynamics and be-
havior.
2.1 Sequential Adaptive Algorithm
Selection
In the sequential setting, a number of reinforcement
machine learning schemes have been proposed for the
online and adaptive selection of algorithms from a
given portfolio. Back to the early works of Grefen-
stette (Grefenstette, 1986), one standard technique
consists in predicting the performance of a set of oper-
ators using a simple linear regression and the current

average fitness of the population, which then allows
to select the best operator to be chosen according to
the prediction given by the regression. However, re-
cent works embed this selection problem into a multi-
armed bandit framework dealing more explicitly with
the tradeoff between the exploitation of the best so
far identified algorithm, and the exploration of the re-
maining potentially underestimated algorithms.
A simple strategy is the so-called ε-greedy strat-
egy which consists in selecting the algorithm with the
best estimated performance at the rate (1 − ε), and a
random one at rate ε.
The Upper Confidence Bound (UCB) strat-
egy (Auer et al., 2002) is a state-of-the-art framework
in machine-learning which consists in estimating the
upper confidence bound of the expected reward of
each arm by ˆµ
i
+C · e
i
; where ˆµ
i
is the estimated (em-
pirical) mean reward, and e
i
is the standard error of
the prediction. It then selects the algorithms with the
higher bound (for maximization problem). The pa-
rameter C allows to tune the exploitation/exploration
trade-off. In the context of algorithm selection (Fialho
et al., 2010) where the arms could be neither indepen-
dent nor stationary, the estimation of the expected re-
ward is refined using a sliding window where only the
W previous performance observations are considered.
The Adaptive Pursuit (AP) strategy (Thierens,
2005) is another technique using an exponential re-
cency weighted average to estimate the expected re-
ward with a parameter α to tune the adaptation rate
of the estimation. This is used to define the probabil-
ity p
i
of selecting every algorithm from the portfolio.
At each iteration, these probability values are updated
according to a learning rate β, which basically allows
to increase the selection probability for the best algo-
rithm, and to decrease it for the other ones.
One key aspect to design a successful adaptive se-
lection strategy is the estimation of the quality of an
algorithm based on the observed rewards. Some au-
thors showed that the maximum reward over a sliding
window improves the performance compared to the
means on some combinatorial problems (Fialho et al.,
2010; Candan et al., 2013); but no fundamental analy-
sis of this result was given. In genetic algorithms, the
reward can be computed not only based on the quality
but also on the diversity of the population (Maturana
et al., 2009). In the context of parallel adaptive al-
gorithm selection, the estimation of quality of each
available algorithm is also a difficult question since
not only one but many algorithms instances could be
executed in each iteration.
2.2 Parallel Adaptive Algorithm
Selection
The Master-Worker (M/W) architecture has been ex-
tensively studied in evolutionary computation (e.g.,
see (Dubreuil et al., 2006)). It is in fact simple to im-
plement, and does not require sophisticated parallel
operations.
Two communication modes are usually consid-
ered. In the synchronous mode, the distributed enti-
ties operate in rounds, where in each round the master
communicates actions to the workers and then waits
until receiving a response from every worker before
starting a new round, and so on. In the asynchronous
mode, the master does not need to wait for all work-
ers; but instead can initiate a new communication with
a worker, typically when that worker has terminated
executing the previous action and is idle. When the
evaluation time of the fitness function can vary sub-
stantially during the course of execution, the asyn-
chronous mode is generally preferred (Yagoubi and
Schoenauer, 2012) since it can substantially improve
parallel efficiency. However, the synchronous mode
can allow to have a more global view of the dis-
tributed system which can be crucially important to
better coordinate the workers (Wessing et al., 2016).
Adaptive selection approaches designed to oper-
ate in a distributed setting are not new. The island
model, which is considered as inherently distributed,
has been investigated in the past. The first studies con-
ducted in this context demonstrate that the dynamics
of an optimal parallel selection method can be funda-
mentally different at the first sight from its sequential
counterpart. For instance, because of the stochasticity
of evolutionary operators, it has been noted that a set
of heterogeneous nodes can outperform a set of nodes
executing in parallel the same sequence of algorithms
computed according to a sequential algorithm selec-
tion oracle (Derbel and Verel, 2011). To cite a few,
in (Tanabe and Fukunaga, 2013; Garc
´
ıa-Valdez et al.,
2014), it is also well known that a random setting
the parameters at each iteration in a heterogeneous
manner can outperform static homogeneous parame-
ter settings. Nonetheless, embedding a reinforcement
machine learning technique instead of random selec-
tion can improve the performance of the adaptive dis-
tributed system.
In (Derbel and Verel, 2011; Jankee et al., 2015),
a distributed adaptive metaheuristic selection frame-
work is proposed which can be viewed as a natural
extension of the island model that was specifically de-
signed to fit the distributed nature of the target com-
pute platforms.
The adaptive selection is performed locally by

selecting the best rewarded metaheuristic from the
neighboring nodes (islands) or a random one with
small probability like in ε-greedy strategy. Notice,
however, that we are not aware of any in-depth anal-
ysis addressing the design principles underlying an
M/W adaptive algorithm selection approach. In this
work, we propose and empirically analyze the behav-
ior of such an approach in an attempt to fill the gap
between the existing sequential algorithm selection
methods and the possibility to deploy them in a paral-
lel compute environment using a simple, yet effective,
parallel scheme like the M/W one.
2.3 Benchmarks: The Fitness Cloud
Model
The understanding of the dynamics of a selection
strategy according to the problem at hand is a difficult
issue. A number of artificial combinatorial problems
have been designed and used in the literature. We
can distinguish between two main benchmark classes.
In the first one, a well-known combinatorial problem
in evolutionary algorithm is used, such as oneMax or
long-path problems, with basic operators, such as bit-
flip, embedded in a (1+λ)-EA (DaCosta et al., 2008).
This, however, can only highlight the search behavior
according to few and problem-specific properties. In
the second class of benchmarks, the problem and the
stochastic operators are abstracted. The performance
of each available operator is then defined according to
the state of the search (Thierens, 2005; Fialho et al.,
2010; Go
¨
effon et al., 2016; Jankee et al., 2016). This
allows to study important black box (problem inde-
pendent) features such as the number of operators, the
frequency of change of the best operators, the quality
difference between operators, etc.
In this work, we use a tunable benchmark, called
the Fitness Cloud Model (FCM), introduced recently
in (Jankee et al., 2016). The FCM is a benchmark
from the second class where the state of the search is
given by the fitness of the solution. The fitness of
a solution after applying a search operator is mod-
eled by a random variable for which the probability
distribution depends on the fitness of the current so-
lution. A normal distribution with tunable parame-
ters is typically used. More specifically, given the
fitness z = f (x) of the current solution x, the prob-
ability distribution of the fitness f (y) of one solu-
tion obtained by a specific operator is defined by:
Pr( f (y) = z
0
| f (x) = z) ∼ N (µ(z), σ
2
(z)) where µ(z)
and σ
2
(z) are respectively the mean and the variance
of the normal distribution. In (Jankee et al., 2016),
a simple scenario with two operators is studied. The
mean and variance of the conditional normal distri-
bution are defined as follows: µ
i
(z) = z + K
µ
i
and
σ
2
i
(z) = K
σ
i
for each operator i ∈ {1, 2}. Parameters
K
µ
i
and K
σ
i
are different constant numbers. An adap-
tive algorithm is assumed to start with a search state
where the fitness value is 0, and stops when a fitness
value of 1 is reached. The expected running time of
(1 +1)-EA is then proved to be the inverse of the best
expected improvement of among the considered oper-
ators, which can be analytically computed assuming a
normal distribution. Notice that in the FCM, one can
control the average quality and the variance of each
operator as well the relative difference between the
considered operators.
3 DESIGN BATCH ADAPTIVE
MASTER-WORKER
ALGORITHM
The global architecture of the proposed adaptive M/W
framework is summarized in Algorithm 1. 2 depicts
the high level code executed by the master. Algo-
rithm 3 presents the high level code executed in par-
allel by each worker. The overall algorithm operates
in different parallel rounds. At each round, the master
sends the best solution x
?
and a batch of operator iden-
tifiers Θ to be executed by each worker node i. After
getting the batch, each worker executes iteratively its
assigned operators starting from x
?
as an initial solu-
tion and computes a new local best solution. The mas-
ter waits for all best local solutions to be computed in
parallel by the workers, and updates the x
?
to be con-
sidered in the next round. The workers also inform
back the master of the performance observed when
executing the batch of operators. Note that when the
size of the batch of operators is one, each worker ex-
ecutes only one fitness evaluation; which is basically
the same as a synchronous parallel (1+ λ)-EA with λ
equals to the number of workers n.
In our algorithm selection setting, a portfolio of k
(local search) operators is assumed to be given, and
no a priori knowledge is assumed on the behavior of
the operators. The adaptive part of our framework
is mainly handled at the master level. In fact, af-
ter collecting the rewards computed locally by each
worker, the master executes the main function Selec-
tion Strategy (line 12 of Algo. 1) which allows him to
compute the new set of batches Θ
i
to be sent again to
each worker i. Before going into further details, it is
important to emphasize that the batch Θ
i
is simply an
ordered list of operators to be executed consecutively
in a row by the corresponding worker i following the
general framework of a (1+1)-EA as depicted in Al-

Algorithm 1: Adaptive M/W algorithm for the master node.
1: (Θ
1
, Θ
2
, ..., Θ
n
) ←Selection Strategy Initialization()
2: x
?
← Solution Initialization() ; f
?
← f (x
?
)
3: repeat
4: for each worker i do
5: Send Msg(Θ
i
, x
?
, f
?
) to worker i
6: end for
7: Wait until all messages are received from all work-
ers
8: for each worker i do
9: (r
i
, x
i
, f
i
) ← Receive Msg() from worker i
10: end for
11: x
?
← x
i
; f
?
← f
i
s.t. f
i
= max{ f
?
, f
1
, f
2
, . . . , f
n
}
12: (Θ
1
, Θ
2
, ..., Θ
n
) ← Selection Strategy(r
1
, ..., r
n
)
13: until stopping criterion is true
Algorithm 2: Adaptive algorithm selection strategy.
1: function SELECTION STRATEGY(r
1
, ..., r
n
)
2: for each operator j do
3: R
j
← Global Reward Aggregation(r
1
, ..., r
n
)
4: end for
5: (Θ
1
, Θ
2
, ..., Θ
n
) ←Decision Strategy(R
1
, R
2
, ..., R
k
)
6: return (Θ
1
, Θ
2
, ..., Θ
n
)
7: end function
Algorithm 3 : Adaptive M/W algorithm for each worker
node.
1: (Θ, x
?
, f
?
) ← Receive Msg() from master
2: for each index b of operators batch Θ do
3: x
0
← Apply operator Θ
b
on x
?
4: f
0
← Evaluate fitness of x
0
5: δ
b
← max(0, f
0
− f
?
)
6: if f (x
?
) < f (x
0
) then
7: x
?
← x
0
; f
?
← f
0
8: end if
9: end for
10: for each operator j do
11: r
j
← Local Reward Aggregation(δ)
12: end for
13: Send Msg((r
1
, r
2
, . . . , r
k
), x
∗
, f
∗
) to master
gorithm 3.
More precisely, the number of search iterations
executed by each worker is the size of the batch, and
the search operator applied at each iteration corre-
spond to the order given in the same batch. At each
iteration, the fitness improvement δ
b
of each operator
is evaluated (the positive fitness difference between
solutions before and after applying the operator). The
fitness improvement (Fialho et al., 2009) will allow
each worker to compute a local reward for every exe-
cuted operator. The Local Reward Aggregation func-
tion (line 11 of Algo. 3) allows each worker to com-
pute a local reward r
j
for each operator (if included in
the batch) according to the observed improvements δ.
The main function Selection Strategy executed at
the master level is responsible for : (i) aggregating
Table 1: Parameter use for the selection strategies.
Selection strategies Parameter
UCB c = 0.005, w = 700
AP α = 0.2, β = 0.2
ε-Greedy ε = 0.05, w = 4500
δ-Greedy Inc = 10
Operators µ (×10
−4
) σ (×10
−4
)
op
1
-1 1
op
2
-10 5
the local rewards sent by the worker and (ii) accord-
ingly select the new set of operators batches. This is
described in next subsection.
We also designed a simple heterogeneous selec-
tion strategy, called ∆-greedy. In the very first round,
the operators are randomly assigned to workers just
like for any other strategies. In the subsequent rounds,
the number of workers associated with the best opera-
tor is increased by ∆, where ∆ is an integer parameter;
and the number of workers associated with the worst
operator is decreased by ∆. The best (resp. worst) op-
erator is computed as the one which attains the high-
est (resp. lowest) local reward in the previous round.
In order to avoid side effects, the number of workers
associated with each operator is bounded by a min-
imal number n
min
which is the second parameter of
this strategy. For each worker, the batch of operators
remains, however, homogeneous for this strategy, i.e.,
a worker executes the same operator which is possibly
different from the one executed by a different worker.
4 EXPERIMENTAL ANALYSIS
In this section, we analysis by experiments on the fit-
ness cloud benchmark which defines a relevant sce-
nario for M/S framework using a batch of opera-
tors the adaptive performance of difference selection
strategies, and the parallel efficiency of using a batch
of algorithms to execute on each worker according to
the communication cost relatively to the computation
cost of the fitness function.
4.1 Experimental Setup
In order to examine different possible parallel ar-
chitecture, we choose a simulation-based approach
where we count the number of round and the amount
of communication performed by the master until
reaching the optimal fitness value. In that way, we are
able to discuss on the communication cost indepen-
dently to a specific architecture. Following the Fit-
ness Cloud Model (Jankee et al., 2016), we consider
a portfolio with two operators, both follows a normal
distribution of fitness value as discussed in the section
2.3. The mean value of the first operator op
1
is cho-
sen to be higher than the second operator op
2
, but the
variance of op
1
is smaller than the second operator.
This scenario is one of the most relevant for a parallel
system. Indeed, when one solution is created by an
operator, the expected improvement of the first oper-
ator op
1
is higher than the one of the operators op
2
.
In that way, the first operator would be preferred in a
sequential algorithm producing iteratively new solu-
tions. On the contrary, when a number of solutions
are created at the same time by an operator, the gain
of the second operator op
2
is larger than the first op-
erator, i.e. the longest tail of the fitness distribution of
the second operator op
2
is more likely to produce a
better solution. This scenario allows us to accurately
analyze the impact of the number of workers and the
size of the batch of algorithms send to each worker.
The Table 1 gives the values of the parameters of the
normal distribution used in this work.
In this work, the sequential selection strategies,
AP, UCB, and ε-Greedy, (see Sect. 2.1) are tailored
to a M/W framework. There are two main differences
with the original versions. First, instead of one reward
value, a set of reward values are used to update the
quality of each operator. To this goal, the local and the
global aggregation functions (see Algo. 1 and 3) com-
pute the maximum of fitness improvements given, re-
spectively, by the batch of operators and by the set of
workers. Second, each selection strategy selects a set
of operators instead of a single operator at each round.
For UCB strategy which selects the operator with the
highest score, the set of selected operators is homo-
geneous: for any workers and any operators from the
batch of operators, the same operator (with the high-
est score) is selected. The other selection strategies
(AP, ε-greedy, and δ-Greedy) defines a probability of
selection of each operator. Then, for any operator in
the batch of any worker, the operator is selected ac-
cording to these probabilities. Those set of operators
is heterogenous at the workers level and at the batch
level.
The parameter set of the different selection strate-
gies is given in Table 1. We follow the robust param-
eters proposed in (Jankee et al., 2016; Jankee et al.,
2015). For all following experiments, the algorithm
is repeated independently 32 times, and the average
value of performance (number of rounds, or compu-
tation effort) are computed.
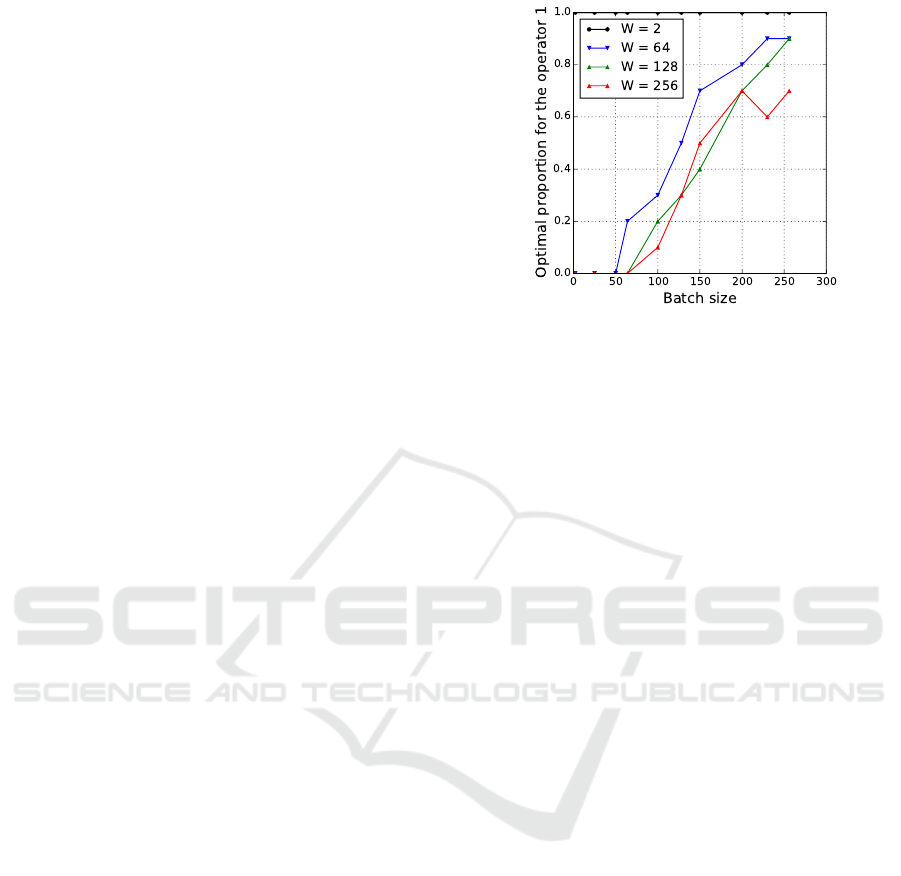
Figure 1: Random strategies in function the batch size and
windows size, we observe the proportion to use the operator
2 that is to say the operator having long tail.
4.2 Baseline Selection Strategy
The operator op
1
and op
2
of the benchmark are static
in the sense that the parameters of the fitness distri-
bution does not change the optimization process ac-
cording to the state of the search. In this case, a bias
random selection of operators can be considered as a
baseline strategy: with a rate p between 0 and 1, the
operator op
1
is selected, and the with the rate 1 − p
the operator op
2
is selected. This baseline strategy
helps to understand the tradeoff between a selection
that promotes the worker level or that promotes the
master level according to the operator batch size and
the number of workers.
Figure 1 shows the value of p which ob-
tains the best performance. This best value is
computed off-line by experiments from the set
{0, 0.2,0.4, 0.6, 0.8, 1}, and we denote by p
?
this
value. When the batch size is small, i.e. the number
of operators in the batch send to each worker, except
when the number of workers is very small (such as 2
workers), the optimal rate p
?
is 0, and a bias random
selection strategy always selects the second operator.
In this case, the operator op
2
with the lowest average
but longest tail is the most interesting one. On the
contrary, the optimal rate p
?
increases with the batch
size. When the number of workers is equal to the size
of batch, both equal to 128, the optimal bias random
selection selects the operator 2 (with long tails) with
rates 70% and therefore the operator 1 with rate 30%
(with the highest average). The optimal p
?
is larger
than 80% when the batch size is large with respect to
the number of workers (the batch size is the double of
the number of workers). With lower amounts of infor-
mation exchange between workers, an efficient search
converges toward to sequential process where the first
operator with highest expected gain with one trial is
preferred. In that case, a sequential setting in favor
of the operator with a small improvement but with a
high probability is promoted.
4.3 Adaptive Performance with a Batch
Scheduling Technique
In Master/Worker framework, a batch scheduling
technique can be used to reduce the communication
to the computation cost. In this section, the goal is not
to analyze the performance of such a technique from
a purely parallel perspective, but instead, to highlight
the accuracy of an adaptive strategy to select the rele-
vant operators in the batch, which is a challenging is-
sue per se. Instead of analyzing the number of rounds
to optimum, we hence study the number of evalua-
tions executed in parallel by all the workers. Since the
range of the number of evaluations can be huge as a
function of the number of workers and the batch size,
we consider to normalize it by the average number
of evaluations of the unbiased heterogeneous random
strategy with p = 0.5 considered as a baseline. Due
to lack of space, only a representative set of results is
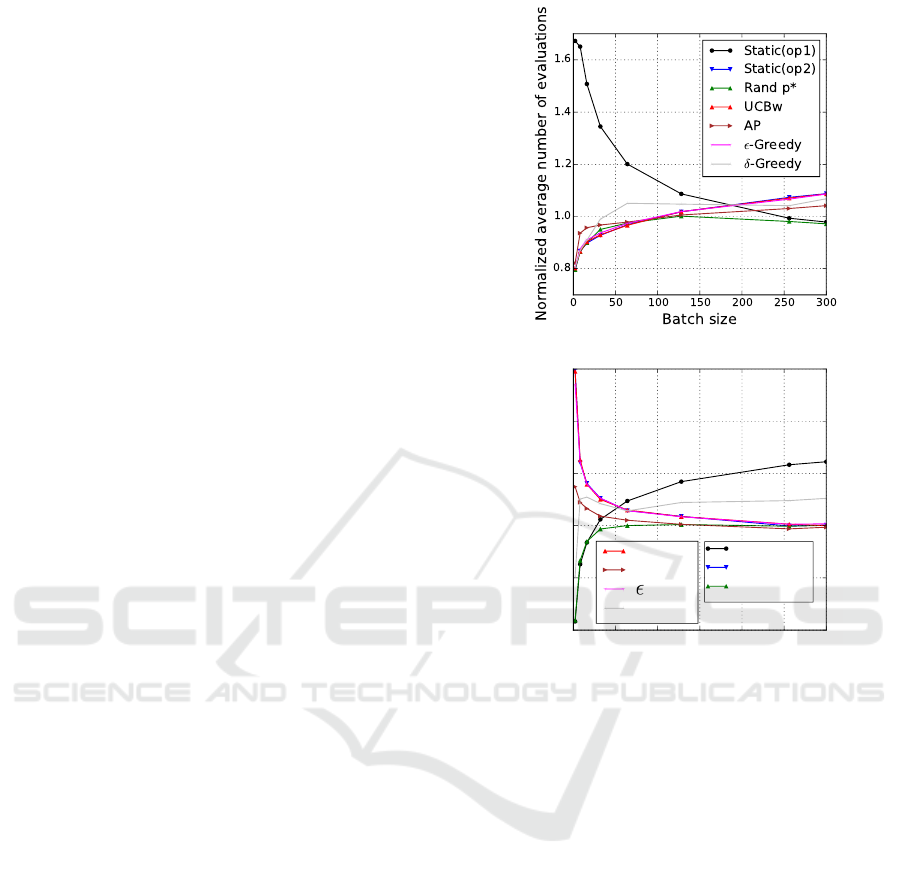
shown in Fig. 2, providing an overview of the relative
behavior of the adaptive strategies with respect to the
baseline one.
Notice that a strategy with a normalized value be-
low 1 in Fig. 2 is better than the unbiased random one,
and inversely. For completeness, we include the static
strategies that would always select the same pre-fixed
operator in all rounds.
For all adaptive strategies, the relative normal-
ized performance decreases with the size of the batch
scheduling. The adaptive strategies are in fact found
to be relatively better than the random one for a small
size batch, but, they become worse for a large size
batch. On the contrary, the relative normalized perfor-
mance of adaptive strategies increases with the num-
ber of workers. UCB and ε-greedy are not able to
select the optimal operator in each round when the
number of workers is lower than 50 (and batch size
128). In this case, the heterogeneous AP outperforms
the other strategies, and can be better than an opti-
mal homogeneous strategy. Actually, when the size of
the batch is large with respect to the number of work-
ers, the adaptive strategies fail to perform accurately.
In this case, we hypothesize that alternative selection
mechanism based on the local reward of each worker
would be better than a selection based on the estima-
tion of the global reward.
0 50 100 150 200 250 300
Number of workers
0.8
0.9
1.0
1.1
1.2
1.3
Normalized average number of evaluations
Static(op1)
Static(op2)
Rand p*
UCBw
AP
-Greedy
δ-Greedy
Figure 2: Normalized average number of evaluations as a
function of batch size using 128 workers (top), and as a
function of the number of workers using a batch size 128
(bottom). The values are normalized by the average number
of evaluations of the heterogeneous random strategy with
p = 0.5. The lower the better.
5 CONCLUSIONS
An efficient Master/Worker framework should deal
with the tradeoff between the communication and the
computation costs. Independently of the adaptive
properties of the optimization method, a batch strat-
egy can be used to reduce the communication cost but
possibly decrease the performance of the optimization
process. In this paper, we deeply analyze the adaptive
method according to the number of workers as well of
the size of the batch of operators sent to each worker.
We show that another tradeoff is also required from
an adaptive point of view, and the heterogeneous se-
lection strategy outperforms homogeneous ones when
the batch size is large with respect to the number of
workers.
We proposed a naive batch strategy, the master de-

termines an operator list to be executed on the slave
according to this knowledge. It would be interesting
to have two selection strategies on the master, another
on the worker. The master could send the parameters
to the worker selection policy instead of pre-setting
an operator list because we know that the operator to
use is not necessarily the same according to the stage
of the search state of a worker.
In another perspective, an asynchronous architec-
ture would make it possible to improve the time of
use of the slave processors, especially when the com-
putation time of the fitness varies according to the
state of the search. Moreover, the batch does not im-
prove the synchronization between the different com-
pute nodes. An asynchronous architecture makes it
possible to better exploit the network resources.
REFERENCES
Armas, R., Aguirre, H., Zapotecas-Mart
´
ınez, S., and
Tanaka, K. (2016). Traffic signal optimization: Mini-
mizing travel time and fuel consumption. In EA 2015,
pages 29–43. Springer.
Auer, P., Cesa-Bianchi, N., and Fischer, P. (2002). Finite-
time analysis of the multiarmed bandit problem. Ma-
chine learning, 47(2-3):235–256.
Baudi
ˇ
s, P. and Po
ˇ
s
´
ık, P. (2014). Online black-box algorithm
portfolios for continuous optimization. In PPSN XIII,
pages 40–49. Springer.
Candan, C., Go
¨
effon, A., Lardeux, F., and Saubion, F.
(2013). Non stationary operator selection with island
models. In GECCO, pages 1509–1516.
DaCosta, L., Fialho, A., Schoenauer, M., and Sebag, M.
(2008). Adaptive operator selection with dynamic
multi-armed bandits. In GECCO, page 913. ACM
Press.
Dasgupta, D. and Michalewicz, Z. (2013). Evolutionary
algorithms in engineering applications. Springer Sci-
ence & Business Media.
Derbel, B. and Verel, S. (2011). DAMS: distributed adap-
tive metaheuristic selection. In GECCO, pages 1955–
1962. ACM Press.
Dubreuil, M., Gagne, C., and Parizeau, M. (2006). Analy-
sis of a master-slave architecture for distributed evolu-
tionary computations. IEEE T. on Systems, Man, and
Cybernetics: Part B, 36:229–235.
Eiben, A. E., Michalewicz, Z., Schoenauer, M., and Smith,
J. E. (2007). Parameter control in evolutionary algo-
rithms. In Parameter Setting in Evolutionary Algo-
rithms, pages 19–46. Springer.
Fialho, A., Da Costa, L., Schoenauer, M., and Sebag, M.
(2009). Dynamic multi-armed bandits and extreme
value-based rewards for adaptive operator selection in
evolutionary algorithms. In LION’09, volume 5851,
pages 176–190. Springer.
Fialho, A., Da Costa, L., Schoenauer, M., and Sebag, M.
(2010). Analyzing bandit-based adaptive operator se-
lection mechanisms. Annals of Mathematics and Arti-
ficial Intelligence, 60:25–64.
Garc
´
ıa-Valdez, M., Trujillo, L., Merelo-Gu
´
ervos, J. J., and
Fern
´
andez-de Vega, F. (2014). Randomized parame-
ter settings for heterogeneous workers in a pool-based
evolutionary algorithm. In PPSN XIII, pages 702–710.
Springer.
Go
¨
effon, A., Lardeux, F., and Saubion, F. (2016). Simu-
lating non-stationary operators in search algorithms.
Appl. Soft Comput., 38:257–268.
Grefenstette, J. J. (1986). Optimization of control parame-
ters for genetic algorithms. Systems, Man and Cyber-
netics, IEEE Transactions on, 16(1):122–128.
Harada, T. and Takadama, K. (2017). Performance compar-
ison of parallel asynchronous multi-objective evolu-
tionary algorithm with different asynchrony. In CEC.
Jankee, C., Verel, S., Derbel, B., and Fonlupt, C. (2015).
Distributed Adaptive Metaheuristic Selection: Com-
parisons of Selection Strategies. In EA 2015, pages
83–96.
Jankee, C., Verel, S., Derbel, B., and Fonlupt, C. (2016). A
fitness cloud model for adaptive metaheuristic selec-
tion methods. In PPSN 2016, pages 80–90. Springer.
Kotthoff, L. (2012-10-30). Algorithm selection for com-
binatorial search problems: A survey. AI Magazine,
pages 48–60.
Kunanusont, K., Gaina, R. D., Liu, J., Perez-Liebana, D.,
and Lucas, S. M. (2017). The n-tuple bandit evolu-
tionary algorithm for automatic game improvement.
In CEC.
Maturana, J., Fialho,
´
A., Saubion, F., Schoenauer, M., and
Sebag, M. (2009). Extreme compass and dynamic
multi-armed bandits for adaptive operator selection.
In CEC, pages 365–372. IEEE.
Muniglia, M., Do, J.-M., Jean-Charles, L. P., Grard, H.,
Verel, S., and David, S. (2016). A Multi-Physics PWR
Model for the Load Following. In ICAPP.
Tanabe, R. and Fukunaga, A. (2013). Evaluation of a ran-
domized parameter setting strategy for island-model
evolutionary algorithms. In CEC 2013, pages 1263–
1270.
Thierens, D. (2005). An adaptive pursuit strategy for al-
locating operator probabilities. In GECCO’05, pages
1539–1546.
Tomassini, M. (2005). Spatially Structured Evolutionary
Algorithms: Artificial Evolution in Space and Time
(Natural Computing Series). Springer-Verlag New
York, Inc., Secaucus, NJ, USA.
Wessing, S., Rudolph, G., and Menges, D. A. (2016). Com-
paring asynchronous and synchronous parallelization
of the sms-emoa. In PPSN XIV, pages 558–567,
Cham. Springer.
Yagoubi, M. and Schoenauer, M. (2012). Asynchronous
master/slave moeas and heterogeneous evaluation
costs. In GECCO, pages 1007–1014.
