
Reinforcement Learning for Modeling Large-Scale Cognitive
Reasoning
Ying Zhao
1
, Emily Mooren
1
and Nate Derbinsky
2
1
Naval Postgraduate School, Monterey, CA, U.S.A.
2
Northeastern University, Boston, MA, U.S.A.
Keywords: Reinforcement Learning, Combat Identification, Soar, Cognitive Functions, Decision Making, Machine
Learning.
Abstract: Accurate, relevant, and timely combat identification (CID) enables warfighters to locate and identify critical
airborne targets with high precision. The current CID processes included a wide combination of platforms,
sensors, networks, and decision makers. There are diversified doctrines, rules of engagements, knowledge
databases, and expert systems used in the current process to make the decision making very complex.
Furthermore, the CID decision process is still very manual. Decision makers are constantly overwhelmed
with the cognitive reasoning required. Soar is a cognitive architecture that can be used to model complex
reasoning, cognitive functions, and decision making for warfighting processes like the ones in a kill chain.
In this paper, we present a feasibility study of Soar, and in particular the reinforcement learning (RL)
module, for optimal decision making using existing expert systems and smart data. The system has the
potential to scale up and automate CID decision-making to reduce the cognitive load of human operators.
1 INTRODUCTION
Accurate, relevant, and timely combat identification
(CID) enables warfighters to locate and identify
critical airborne targets with high precision. The
current CID processes include the use multiple
platforms, sensors, networks and decision makers.
There are diversified doctrines, rules of
engagements, knowledge repositories, and expert
systems used in the current process to address the
complexity of decision making challenges.
Figure
1 shows many people (watch stations) that
are involved in a CID decision-making process for a
Combat Information Center (CIC). However, the
process is still very manual. Decision makers such as
Tactical Action Officers (TAOs) and Air Defense
Officers (ADOs) are constantly overwhelmed with
the cognitive reasoning required (Scruggs, 2009).
The core for the research presented in this paper
is to investigate the efficacy of artificial intelligence
(AI) systems that utilize Machine Learning (ML) for
using, fusing, and improving on existing knowledge
models for CID cognitive functions that lead to
timely and automatic decision-making, such as to
reduce cognitive burden in the operational
environment. The contribution of the paper is that
we present and demonstrate a working
implementation: it applies the rule-based Soar
system jointly with the reinforcement learning
algorithm that is suitable for the CID application
domain. While we know Soar can handle large
numbers of rules (Laird, 2012), this a
position/opinion, rather than fact, which we will
require future work to prove, that the methodology
and framework can be potentially scaled up to large
amount of knowledge bases and ontologies related to
CID.
Figure 1: Complex decision making in the CID current
process.
Zhao Y., Mooren E. and Derbinsky N.
Reinforcement Learning for Modeling Large-Scale Cognitive Reasoning.
DOI: 10.5220/0006508702330238
In Proceedings of the 9th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (KEOD 2017), pages 233-238
ISBN: 978-989-758-272-1
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2 METHODS
2.1 Soar and Reinforcement Learning
Soar (Laird, 2012) is a cognitive architecture that
scalably integrates a rule-based system with many
other capabilities, including RL and long-term
memory. The main decision cycle involves rules that
propose new operators, as well as preferences for
selecting amongst them; an architectural operator-
selection process; and application rules that modify
agent state. The reinforcement learning module
(Soar-RL) modifies numeric preferences for
selecting operators based on a reward signal, either
via internal or external source(s). Soar has been
used in modeling large-scale complex cognitive
functions for warfighting processes like the ones in a
kill chain (Jones et al., 1999).
In this paper, we will show how to use Soar and
specifically the reinforcement learning (Soar-RL)
module to learn an effective combination of existing
CID features for decision-making, as identified by
experts and systems, in an operational environment.
2.2 Combat ID
There are many challenges in the CID process,
including 1) an extremely short time for fusion,
decision-making, and targeting; 2) uncertain and/or
missing data outside sensor (e.g., radar, radio)
ranges; 3) manual decision-making; 4)
heterogeneous data sources for decision making; and
5) multiple decision-makers in the loop.
Existing CID methods, sensors, and systems
include basic CID categories and methodologies as
follows:
1. Procedural. Procedural methods involve
analysis of a target’s “behaviors,” to include
such things as flight profile and point of original
2. Non-cooperative. These methods gather ID
information on a target without that target’s
intentional cooperation/participation.
3. Cooperative. Cooperative CID requires active
participation on the part of the target. A
common example would be an identification
friend or foe (IFF) transponder.
4. Intelligence and ID Fusion methods.
Information derived from various networks
comprises the final CID method.
The existing methods involve wide ranges of
participating platforms such as Destroyers, Cruisers,
Carriers, F/A-18s and E-2Ds; Participating Sensors
such as Radar, Forward Looking Infrared (FLIR),
Identification Friend or Foe (IFF), Precision
Participation Location Identifier (PPLI), National
Technical Means (NTM); and Participating
Networks and Systems such as the Aegis combat
system, Cooperative Engagement Capability (CEC)
and Link-16. There are diversified doctrines, rules
of engagements (ROE), knowledge databases and
expert systems, as smart data used in the current
process. Many existing rules, expert systems and
smart data may be obselete, incomplete, or have low
confidence levels. Some models may be conflicted
with each other, even wrong or not adapative to a
local environment. There is a critical need to
research methodologies to better use, fuse and
improve on all these models to advance the art of
CID a higher symbolic level.
This paper evaluates Soar-RL as a tool for this
purpose due to the fact it can train and fuse the
system at a symbolic level. The complex CID
cognitive functions are mapped to the models
including decision-making, sensor fusion, analytic
processes and workflow initially and then Soar-RL
is applied to integrate them together.
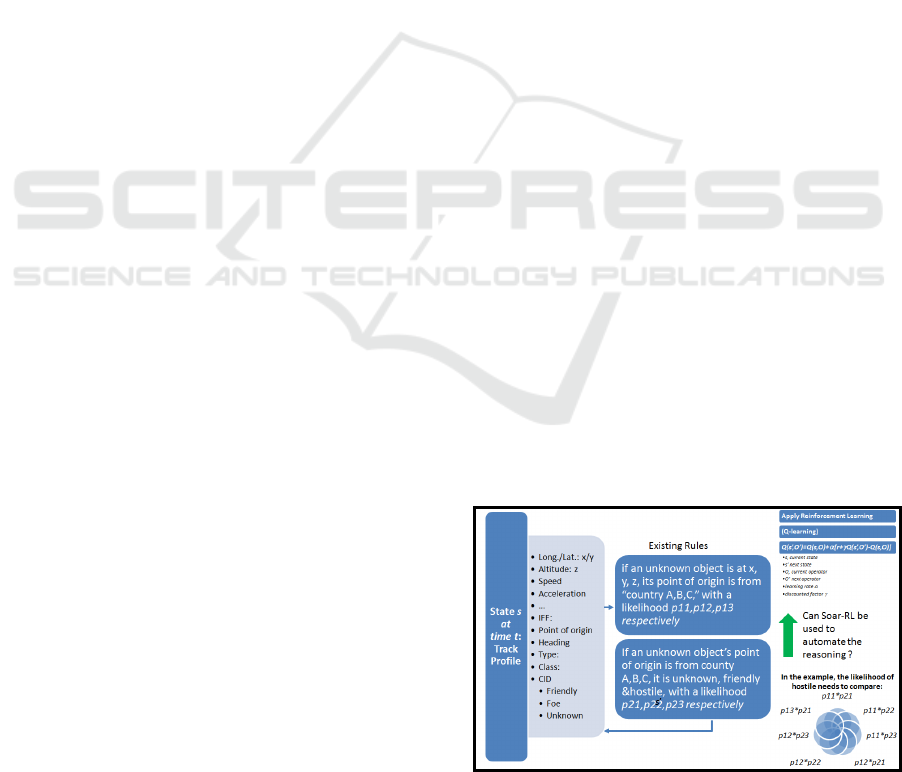
CID decision-making requires a fusion of
existing rules. For example, as shown in Figure 2, a
state at time t can be a track profile of a flying object
with observable data containing longitude/latitude
(x/y position), altitude (z), speed, acceleration, IFF,
point of origin, heading, type, class, etc. The goal is
to classify the CID of the object as friendly, foe or
unknown. So an existing model can be “if an
unknown object is at the position x,y, there is a
probability of p
11
, p
12
or p
13
that the object’s point of
origin to be A, B or C respectively. There is
another model saying “if an unknown object’s point
of origin is from A or B there is probability of p
21
,
p
22
or p
23
that the object is a foe respectively. So
when an object is observed at (x,y), then the
probability of the object being a foe is the maximum
of the combined p
11*
p
21
,p
11*
p
22
,p
11*
p
23
,p
12*
p
21
,p
12*
p
22
, p
12*
p
23
,p
13*
p
21
,p
13*
p
22
, and p
13*
p
23.
Figure 2: Example of CID requires a fusion of existing
rules.
3 SIMULATION
In order to provide a case for feasibility, Table 1
shows simple three rules, with which a Probability
of Hostile (POH) is specified initially as existing
CID rules. We also assume Probability of Non-
Hostile (PONH)=1-POH. These rules are not real-
life CID rules but used as examples in the
simulation.
Table 1: Simple Rules Used in Simulation.
State Existing CID Rules
X,Y
1.If X<10 && Y<10 then
POH=0.0001
Z 2. If Z<6 then POH=0.2
Mode 3. If mode=4 then POH=0.00001
The goal for Soar-RL was to learn and adjust the
preferences of these rules dynamically which are the
same as POH in this case. The actions for the
reinforcement learning are the two decisions (hostile
or non-hostile) for a flying object based on the
observable data (i.e., State s) for the object at time t.
The preference of a decision (i.e., hostile or non-
hostile) is the expected total POH for each decision
(action) at time t, computed using a recursive
formula in Soar-RL. For example, when
x=9,y=9,z=4 and mode=4 at time t
• POH for Rule 1: 0.0001
• POH for Rule 2: 0.2
• POH for Rule 3: 0.00001
So the combined POH or the preference Q(t+1)
for the decision hostile is 0.20011
Similarly,
• PONH for Rule 1: 0.9999
• PONH for Rule 2: 0.8
• PONH for Rule 3: 0.99999
The combined PONH is 2.79998. The
normalized POH and PONH is 0.933 and 0.067
respectively. In the greedy algorithm of Soar-RL, if
POH >PONH, the decision is hostile; else non-
hostile. The Soar-RL decides non-hostile for the
current state. Then the preference of deciding
hostile or non-hostile that has been updated or
learned from the formula below:
(
,
)
=
(
,
)
+(+
max
∈
(
,)−
(
,
)
)
The default learning-rate α=0.3 and discount-
rate γ=0.9. The learning formula requires a teacher’s
feedback (correct decision is rewarded with r=1 and
incorrect decision r=-1). The POH or preference is
computed as follows;
• Preference Q(s
t+1
,a
t+1
) for Rule 1 with the
decision a
t+1
hostile= 0.0001 since this rule is
not activated
• Preference Q(s
t+1
,a
t+1
) for Rule 1 with the
decision a
t+1
non-hostile = 0.9999+0.3(1-
2.79989)/3=0.819911 where Q(s
t+1,
a)=0;
Q(s
t,
a
t
)=2.79989. Since all three rules
contributed to the Q-value for the decision, the
change of Q-value 0.3(1-2.79989) is divided
among the three rules.
Similarly:
• Preference Q(s
t+1
,a
t+1
) for Rule 2 with the
decision a
t+1
hostile= 0.2
• Preference Q(s
t+1
,a
t+1
) for Rule 2 with the
decision a
t+1
non-hostile = 0.8+0.3(1-
2.79989)/3=0.620011.
• Preference Q(s
t+1
,a
t+1
) for Rule 3 with the
decision a
t+1
hostile = 0.00001
• Preference Q(s
t+1
,a
t+1
) for Rule 3 with the
decision a
t+1
non-hostile = 0.99999+0.3(1-
2.79989)/3=0.820001
For the three simple rules, Table 2 shows the
total 8 possible training examples and their ground
truths were used to train a Soar-RL agent.
Table 2: Total 8 training examples and ground truths of
hostility were used in the simulation: for the purposes of
the experiment, the truthful “hostility” is annotated.. “Y”
means hostile and “N” means non-hostile. (Mooren,
2017).
Track
# X-value Y-value Z-value MODE Hostility
1 5 5 5 0 Y
2 12 12 5 0 Y
3 5 5 12 0 Y
4 5 5 5 4 N
5 5 5 12 4 N
6 12 12 12 4 N
7 12 12 5 4 N
8 12 12 12 0 N
Figure 3 shows the screen shots of the examples
when the Soar-RL agent made correct and incorrect
decisions and how they are rewarded from the
environment by the teacher who knows ground truth.
4 RESULTS
Table 3 shows the 8 data points in Table 2 were fed
sequentially to the Soar-RL agent in Figure 3. Soar
made decisions (i.e., the “Soar says” column)
without any learning. This is a baseline run where
the percentage of overall correctness (PAC) is
62.5%. The baseline PAC was used for comparison
to further runs and parameter testing. Table 4
shows
the same 8 data points were used in the first iteration
of the Soar-RL learning. The PAC increased to 75%.
Figure 3: Examples of the Soar-RL training when Soar-RL
agents made correct and incorrect decisions.
Figure 4 shows the 8 data points were ingested
sequentially and iteratively (5 times, a total of 40
data points) to the Soar-RL agent. The first three
iterations were considered as learning phases (LP).
In a LP, the Soar-RL agent’s decision accuracy was
not good, Soar-RL parameter was set ε=0.1 so the
agent can explore, i.e., 10% of the time the agent
made a decision randomly instead of considering the
POHs. In an operational phase, the agent’s decision
accuracy was dramatically improved (due to the
learning in the previous phase) and ready to operate
the parameters set to be greedy with ε=0 (see
Section 4 for the discussion of the parameters). The
agent makes decisions strictly based on the predicted
POHs. The PAC went from 62.5% to 87.5% for the
4 track iterations (total 32 training data points) as
shown in Figure 4. The statistical significance p-
value was 0.04, where the null hypothesis was that
there is no difference of a PAC after a Soar-RL run
compared to the baseline run with any learning.
When 100 iterations (total 800 training data points)
were applied, the PAC increased to 100% (See
Figure 6). Considering the number of rules in the
feasibility study is very small, the possible different
data points for the rules are only 8, the Soar-RL
prototype proved that the system can gradually turn
a learning agent into an operational one using the 8
data points iteratively.
Table 3: Baseline Run - No Learning: The results from a
Soar CID run where no RL was applied.
Track
# Soar Says
Ground
Truth
(Hostile
Y/N)
Correct
(Teacher’s
Feedback)
Overall
Correctness
1 not hostile Y N
62.50%
2 not hostile Y N
3 not hostile Y N
4 not hostile N Y
5
not hostile
N Y
6
not hostile
N Y
7
not hostile
N Y
8 not hostile N Y
Table 4: The results from the 1
st
iteration Soar CID run of
using the 8 data points. The percentage of overall
correction (PAC) increased to 75%.
Track
# Soar Says
Ground
Truth
(Hostile
Y/N)
Correct
(Teacher’s
Feedback)
Percentage
of Overall
Correctness
(PAC)
1 hostile Y
Y
75%
2 hostile Y
Y
3 not hostile Y
N
4 hostile N
N
5
not hostile
N
Y
6
not hostile
N
Y
7
not hostile
N
Y
8 not hostile N
Y
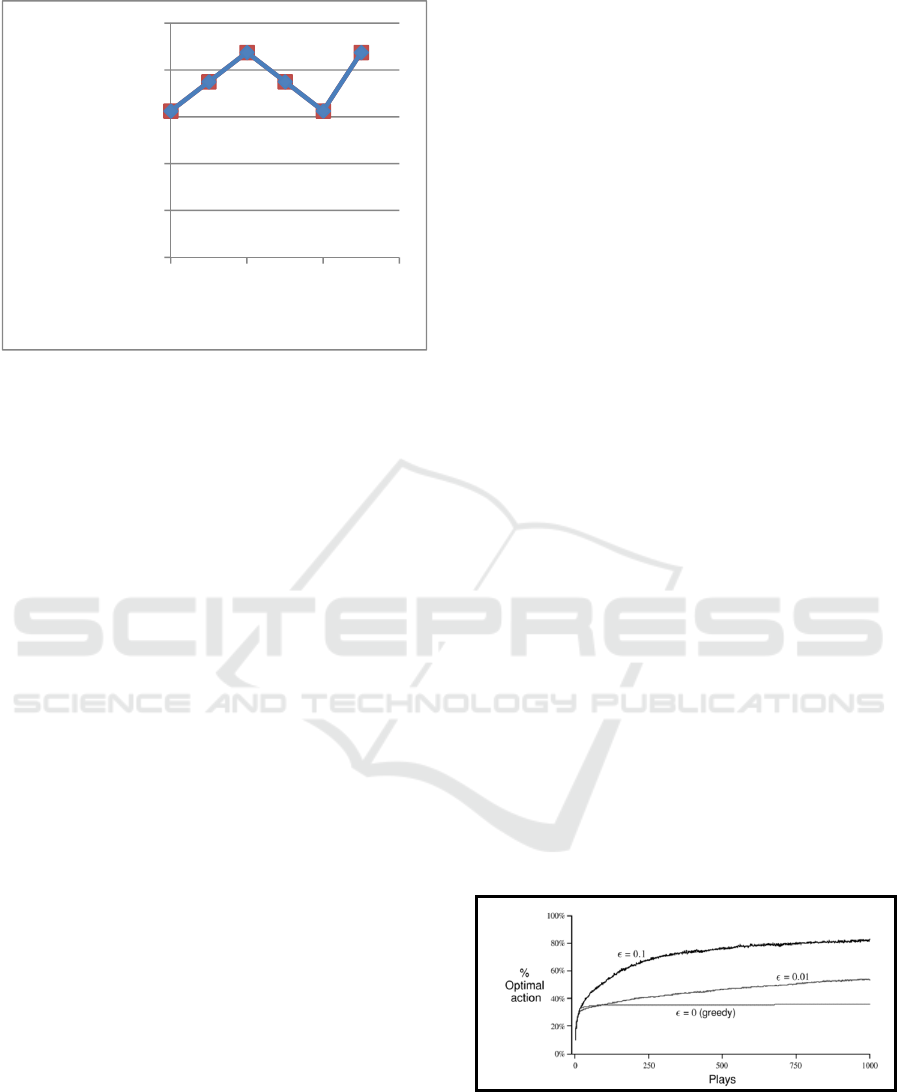
Figure 4: Simulation results of using the 8 data points in
Table 2 for learning with 4 iterations of learning phases
(LP) where ε=0.1 The last iteration (5
th
) was used as an
operational phase (OP) where ε=0. By changing the RL
parameters, the Soar-RL agent is gradually changed from
LPs to an OP.
5 DISCUSSION (MOOREN 2017)
There are two learning-policies available in
Soar/RL: Q-Learning and SARSA. The two
algorithms control how the data will be treated and
how the expected future reward is chosen (Laird,
2012). Both are based on the concept of Temporal
Difference (TD) learning, where specific methods
estimate value functions prior to user input to
modify the final reward (Sutton & Barto, 1998). Q-
learning is an off-policy TD method where the
future reward is maximized and SARSA is a TD
method where the future reward is the value of the
selected operator.
Once the learning policy has been established the
important parameter decides how the actions will be
chosen. As an agent can only improve when
integrated with an environment, the environment
needs to be explored. There are multiple exploration
strategies in Soar. An exploration policy allows for
decision making based on numeric preferences.
There are two main methods: ε-greedy and softmax.
Greedy strategies look to exploit immediate
maximized rewards (Sutton & Barto, 1998). The
integration of ε adds a randomness to the selection.
As ε decreases there is less randomness in selection,
as it increases more. Ε-greedy strategies seek to
maximize reward return, but may sometimes select
an action at random. The utility of randomness has
been proven in certain scenarios and in fact certain
optimality proofs require non-zero probability of
exploring some states.
Figure 5 displays performance improvement
overall with a higher degree of randomness, ε=0.1 in
comparison to the other two depicted selections. The
ε-greedy methods perform better due to their
continued exploration (Sutton & Barto, 1998).
The second exploration strategy is softmax.
Softmax behaves like greedy strategies in selecting
the maximum reward but ranks and weighs the
remaining actions depending on associated value
estimates (Sutton & Barto, 1998). A variation of
softmax is the Boltzmann distribution. Which uses
an additional variable called “temperature” to further
effect the possibility of randomness. Soar sets a
default temperature value of 25.
Deciding which exploration strategy would be
most useful is important because it will determine if
an environment is still being explored or if it is
being exploited. In terms of the two main strategies
discussed earlier there may be benefits of one over
the other based on variable settings. ε-greedy is
primarily an exploitation strategy, but as ε increases,
there is more exploration due to the randomness.
Softmax/Boltzmann is a combination determined by
the temperature setting. Exploration versus
exploitation has long been considered a dilemma
(Tokic, 2010).
The selection of the learning rate is also
important to developing a stable RL system. The
default value for learning rate in Soar is 0.3, with a
range of 0–1. If the learning rate is set approaching
one, the system will learn quickly. If the learning
rate is set approaching zero, the system will learn
more slowly; when set at 0, the system will not
update reward values. To stabilize a RL application
it is feasible to lower the learning rate once the
percentage of correct decisions has maximized.
Figure 5: ε-greedy performance comparison. (Sutton &
Barto, 1998).
0,00%
20,00%
40,00%
60,00%
80,00%
100,00%
0246
Percentage of Overall
Correctness
Track Iterations (Sets of 8)
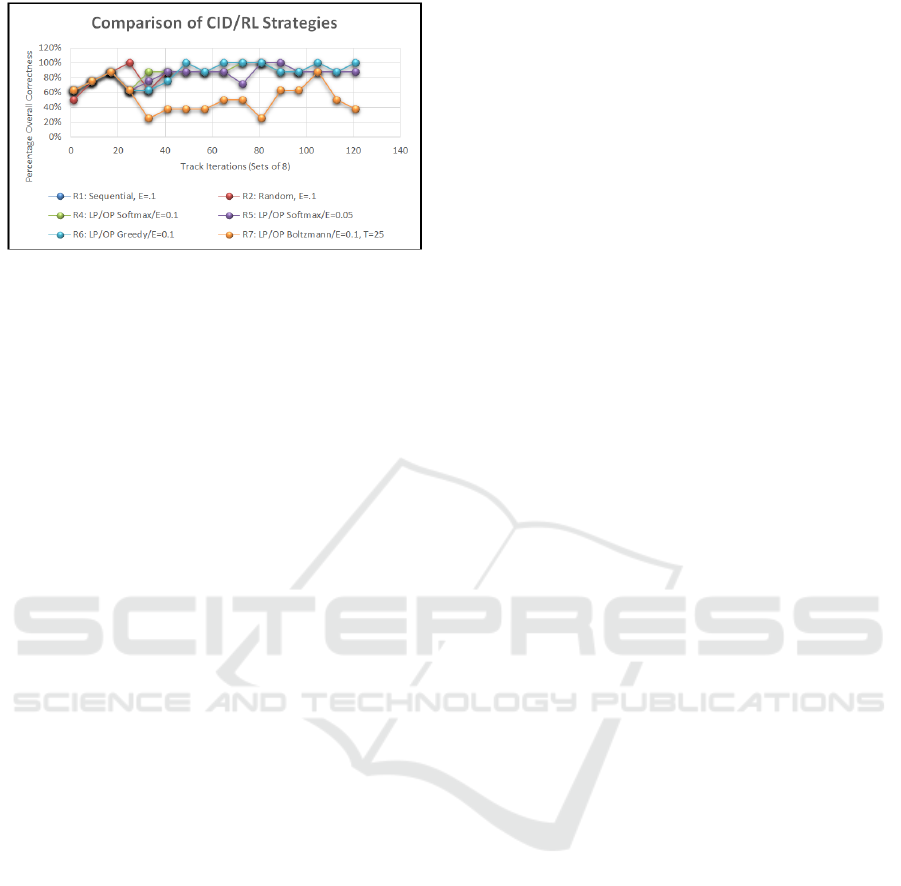
Figure 6: A comparison of ε-greedy action-value methods
for the CID problem (Mooren, 2017).
Figure 6 shows statistical analysis of the PACs
including both the LP and OP. The hypothesis test
was there is no difference of a combined PAC after a
Soar-RL run compared to the baseline run (no
learning). The one-tail p-value for the combined LP
and OP Run 4 is p = 0.0027. Run 6 had the highest
overall LP/OP due to the amount of samples (100
iterations for 800 data points); p = 0.0006. The p-
values in all cases of extended sampling, less Run 7
(p=0.1206) was proven to be statistically significant
and less than the alpha value of 0.05. Therefore, we
reject the null hypothesis and accept the alternative
hypothesis. The integration of RL into a rudimentary
CID problem was successful.
6 CONCLUSIONS
In conclusion, we characterized the CID problem
and apply the Soar-RL method to learn, adapt,
incorporate existing knowledge, models and expert
systems as production rules the CID decision
making application. Specifically, we showed it is
feasible that it is feasible that Soar-RL incorporated
in a combat system can learn from the feedback of
human operators and leverage the existing
knowledge bases. The trained Soar agent can be
used to adapt to the future situations and reduce the
cognitive burdens of human operators. While the
scope of this initial research is limited, the results
are favorable to a dramatic modernization of CID. In
addition to establishing proof of concept, these
findings can aid future research to develop a robust
system that can mimic and/or aid the decision-
making abilities of a human operator. While this
research does focus on a sea-based naval
application, the framework and methodology can
also be expanded and scaled up to DOD-wide
implementations.
ACKNOWLEDGEMENTS
Thanks to the Naval Postgraduate School’s Naval
Research Program for funding this research. Thanks
to Mr. Tom Starai from National Maritime
Intelligence Center who provided insightful
discussion.
REFERENCES
Jones et al., R. M. (1999). Automated Intelligent Pilots for
Combat Flight Simulation. AI Magazine 20.1, 27-41.
Laird, J. E. (2012). The Soar Cognitive Architecture.
Cambridge, MA: The MIT Press.
Mooren, E. (2017). Reinforcement Learning Applications
to Combat Identification. Monterey: Naval
Postgraduate School. Monterey: Naval Postgraduate
School.
Scruggs, V. a. (2009). Combat Identification Training in
the Navy. Center for Naval Analyses Report
D0020254.A3.
Sutton, R. S., & Barto, A. G. (1998). Reinforcement
Learning: An Introduction. Cambridge, MA: The MIT
Press. Retrieved from https://libsearch.nps.edu/
vufind/Record/1124447
Tokic, M. (2010). Adaptive e-greedy exploration in
reinforcement learning based value. Lecture notes in
computer science Vol. 6359. Advances in artificial
intelligence, 203-210.
