
R-FCN Object Detection Ensemble based on Object Resolution and
Image Quality
Christoffer Bøgelund Rasmussen, Kamal Nasrollahi and Thomas B. Moeslund
Visual Analysis of People (VAP) Laboratory, Aalborg University, Aalborg, Denmark
Keywords:
Convolutional Neural Networks, Object Detection, Image Quality Assessment, Ensemble Learning.
Abstract:
Object detection can be difficult due to challenges such as variations in objects both inter- and intra-class. Ad-
ditionally, variations can also be present between images. Based on this, research was conducted into creating
an ensemble of Region-based Fully Convolutional Networks (R-FCN) object detectors. Ensemble strategies
explored were firstly data sampling and selection and secondly combination strategies. Data sampling and se-
lection aimed to create different subsets of data with respect to object size and image quality such that expert
R-FCN ensemble members could be trained. Two combination strategies were explored for combining the
individual member detections into an ensemble result, namely average and a weighted average. R-FCNs were
trained and tested on the PASCAL VOC benchmark object detection dataset. Results proved positive with an
increase in Average Precision (AP), compared to state-of-the-art similar systems, when ensemble members
were combined appropriately.
1 INTRODUCTION
Object detection is a fundamental area of computer
vision that has had a great amount of research over
the past decades. The general goal of object detec-
tion is to find a specific object in an image. The spe-
cific object is typically from a pre-defined list of cate-
gories that are of interest. Object detection generally
consists of two larger tasks; localisation and classifi-
cation. Localisation is typically drawing a bounding-
box around the object indicating where a given object
is in the image and classification is determining the
type of the object with an associated confidence.
Object detection is a challenging problem due to
both large scale issues and minute differences be-
tween objects. Firstly, there is the challenge of
differentiating objects between classes. Depending
on the problem at hand the number of potential
classes present can be thousands or tens of thou-
sand. On top of this, separate object categories
can be both very different in appearance, for ex-
ample an apple and an aeroplane, but separate cat-
egories can also be similar in appearance, such as
dogs and wolves. These main challenges of object
detection stem from two categories which defined
per (Zhang et al., 2013) as: robustness-related and
computational-complexitity and scalability-related.
Robustness-related refers to the challenges in ap-
pearance variations within the both of intra-class and
inter-class. These variations can be categorised into
two types as per (Schroff, 2009) as: object and image
variations. Object variations consist of appearance
differences between object instances with respect to
factors such as colour, texture, shape, and size. Image
variations are differences not related to the object in-
stances themselves but rather the actual image. This
can consist of conditions such as lighting, viewpoint,
scale, occlusion, and clutter. Based upon these dif-
ferences the task of both classifying a given object
as a given class but also differentiating the potentially
largely varying objects into the same class is challeng-
ing.
Current state-of-the-art in object detection is
within the realm of deep learning with Convolutional
Neural Networks (CNN)s. Deep learning methods are
of such a scale that given appropriate data have been
able to address the two main challenges mentioned
earlier. This is exemplified with almost all leading en-
tries in benchmark challenges such as PASCAL VOC
(Everingham et al., 2010), ImageNet (Russakovsky
et al., 2015), and MSCOCO (Lin et al., 2014) con-
sisting of CNN-based approaches. Additionally, re-
cent trends with CNN-based object detection methods
have been to incorporate ensembles of networks to
further enhance performance (He et al., 2015) (Huang
et al., 2016) (Li et al., 2016).
Rasmussen C., Nasrollahi K. and Moeslund T.
R-FCN Object Detection Ensemble based on Object Resolution and Image Quality.
DOI: 10.5220/0006511301100120
In Proceedings of the 9th International Joint Conference on Computational Intelligence (IJCCI 2017), pages 110-120
ISBN: 978-989-758-274-5
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

One of the main goals of an ensemble system is to
reduce the variance incorporated in the training pro-
cess. An example is to train classifiers on different
subsets of the data, creating a number of different en-
semble members. The assumption is that the classi-
fiers will make different errors on a given data point.
However, by combining the classifiers the errors will
be mitigated by the increased strength from lower in-
dividual variance. The ensemble members created
in this work address two of the three main strategies
from (Zhang and Ma, 2012) to build an ensemble sys-
tem. Namely:
1. Data sampling and selection: selection of training
data for individual classifiers.
2. Training member classifiers: specific procedure
used for generating ensemble members.
3. Combining ensemble members: combination rule
for obtaining ensemble decision.
The robustness-related challenges are addressed
by exploring the possibilities of designing expert en-
semble members towards both object and image vari-
ations in a leading object detection benchmark. This
is done by training an ensemble of Region-based
Fully Convolutional Network (R-FCN) with ResNet-
101 networks. Data sampling strategies are used to
create subsets of data with respect to object resolution
and various image quality factors. Finally, two sepa-
rate combination strategies are explored for combin-
ing the ensemble members. The rest of this paper is
organized as follows: the related works are reviewed
in the next section.
2 RELATED WORK
One of the first methods to show that CNN could
significantly improve object detection was that of R-
CNN (Girshick et al., 2014). The method obtains
the name R-CNN as a Convolutional Neural Network
(CNN) is used on regions of the image. Regions are
pre-computed as proposals using a method such as
SelectiveSearch (Uijlings et al., 2013) to give an in-
dication as to where objects may be located. In R-
CNN the CNN model is used as a feature extractor
from which a class-specific linear Support Vector Ma-
chine (SVM) can be trained on top of. The AlexNet-
based feature extractor is firstly pre-trained on a large
dataset designed for classification and then fine-tuned
to object detection. Each pre-computed region pro-
posal is run through a forward pass of the model to
extract features and then passed to the SVM.
The R-CNN method was improved the following
year with Fast R-CNN (Girshick, 2015) and aimed
to improve speed and accuracy. One of the signif-
icant changes is that training end-end rather than in
the multi-stage pipeline in R-CNN. A CNN is again
used as a feature extractor where Region of Interest
(RoI) pooling is conducted on the final feature map.
Afterwards the forward pass continues through two
fully-connected layers followed by two sibling output
layers replacing the external SVM. The sibling out-
puts are a softmax classification layer that produces
probabilities for the object classes and another layer
for bounding-box regression. In R-CNN, the only
deep network used was AlexNet (Krizhevsky et al.,
2012), however, in Fast R-CNN the authors experi-
ment with networks of different size. It was found
that the deeper network VGG-16 (Simonyan and Zis-
serman, 2015) for computing the convolutional fea-
ture map gave a considerable improvement in perfor-
mance. As the name implies the main improvement is
the speed in respect to both training and testing. By
computing a convolutional feature map for an entire
image rather than per object proposal the number of
passes in the network is lowered significantly. While
Fast R-CNN provided improvements in both accuracy
and speed, the increase in speed is only in relation to
the actual object detection and assumes that the region
proposals are pre-computed. Therefore, there is still a
significant bottleneck per image as a region proposal
method can typically take a couple of seconds.
Faster R-CNN (Ren et al., 2015) addressed this
bottleneck in the third iteration of the R-CNN method.
Faster R-CNN showed that region proposals could be
computed as part of the network through the use of a
Region Proposal Network (RPN). The RPN shares the
convolutional layers and feature map used for com-
puting features with RoI pooling in Fast R-CNN. As
these layers are already computed on the entire im-
age for the classification pipeline, the added time for
proposals using the RPN is negligible. Apart from the
change in how region proposals are computed, there is
no difference in comparison to Fast R-CNN. An RPN
takes the last convolutional feature map as input and
returns a number of object proposals.
The winner of the Microsoft Common Objects in
Context (MS COCO) 2015 and ImageNet Large Scale
Visual Recognition Challenge (ILSVRC) 2015 detec-
tion challenge was based on deep residual networks
(ResNets) (He et al., 2015). As is well known with
CNNs, deeper networks are able to capture richer
higher-level features. The authors showed that this is
also beneficial in the object detection domain. In (He
et al., 2015) an ensemble of three deep residual net-
works with 101 layers was trained for object detection
and another ensemble of three used for region pro-
posals with the RPN while being based on the Faster

R-CNN framework. In addition to the ensemble, the
winning entry also added box refinement, global con-
text, and multi-scale testing to the Faster R-CNN.
The current leading method on MS COCO is an
extension of the previously explained ResNets (He
et al., 2015). This method denoted as G-RMI on the
MS COCO leaderboard (COCO, 2017) is an ensem-
ble of five deep residual networks based upon ResNet
(He et al., 2015) and Inception ResNet (Szegedy et al.,
2016) feature extractors. No work has been published
yet on G-RMI at this time, however, a short explana-
tion of the entry is included in a survey paper from the
winning authors (Huang et al., 2016). The approach
was to train a large number of Faster R-CNN mod-
els with varying output stride, variations on the loss
function, and different ordering of the training data.
Based upon the collection of models, five were greed-
ily chosen based upon performance on a validation
set. While performance on the models were impor-
tant, the models were also chosen such that they were
not too similar.
Recently, a newer approach to region-based meth-
ods has been proposed with the use of Fully Convo-
lutional Networks (FCNs) through the R-FCN (Dai
et al., 2016). The overall approach is similar to that
used in region-based methods such as (Girshick et al.,
2014), (Girshick, 2015) and (Ren et al., 2015). First,
it computes region proposals using a region proposal
method and then it performs a classification on these
regions. R-FCN uses the RPN from Faster R-CNN
(Ren et al., 2015) for proposal computation. However,
RoI pooling is performed on position sensitive score
maps rather than the last feature map. The score maps
are split up to represent a relative position in a k × k
grid, with each cell presenting information relative to
the spatial position of an object.
3 OBJECT DETECTION WITH
R-FCN
One of the current leading object detection methods is
the R-FCN (Dai et al., 2016). The authors of R-FCN
were inspired by the recent advances in FCN classifi-
cation networks. R-FCN uses position-sensitive score
maps computed by a bank of convolutional layers.
The maps add translation variance into the detection
pipeline by computing scores in relation to position
information with respect to the relative spatial posi-
tion of an object. A RoI-pooling layer is added after
the score-maps, however, no convolutional operations
are done after this point ensuring translation variance.
The overall approach of the R-FCN also con-
sists of the popular two-stages of region proposal and
region classification. Region proposal is done us-
ing the RPN from Faster R-CNN followed by the
position-sensitive score maps and RoI pooling for re-
gion classification. Similar to Faster R-CNN, convo-
lutional layers are applied on the input image and the
RPN computes region proposals. After this, position-
sensitive score maps aid in classification.
The added translation variance post finding pro-
posals with the RPN by producing a bank of k
2
score
maps for each object category. Therefore, there are
a total of k
2
(C + 1) maps. The number of k
2
maps
is due to a k × k spatial grid representing relative po-
sitions. Typically k = 3, therefore, nine score maps
represent position-sensitive scores for a given object
category. For a given RoI placement the vote for rel-
ative position is sampled from their respective map in
the bank.
Once the bank of score maps have been com-
puted, position-sensitive RoI-pooling is found for re-
gion classification. Each individual k × k bin pools
from its corresponding location in the relevant score
map. For example, the top left bin pools from that
position in the top-left score map and so on. The
final decision for a given class is determined by a
vote where each of the bins are averaged, producing a
(C +1)-dimensional vector for each RoI.
4 PROPOSED METHOD
An ensemble of R-FCNs with the ResNet-101 model
will be trained towards different robustness-related
challenges in the Pattern Analysis, Statistical Mod-
elling and Computational Learning Visual Object
Classes (PASCAL VOC) dataset. The data used will
follow the leading methods for PASCAL VOC 2007
object detection. Training will be done on the 07+12
train sets and testing was conducted on the 07 test set.
Evaluation was conducted using the Average Preci-
sion (AP) metric as per the 07 guidelines.
Leading object detection systems take advantage
of ensemble methods. Many of them are trained with
regards to the variations in internal architecture and
not specifically training experts towards solving spe-
cific challenges. Therefore, the system in this work
will take advantage of the first ensemble strategy from
(Zhang et al., 2013), data sampling and selection. The
individual R-FCNs were trained on different subsets
of training data with the aim to create expert ensem-
ble members in regards robustness-related challenges,
namely object resolution and image quality.
The third strategy in building an ensemble system,
to combine predictions from individual members of
the ensemble is also addressed. Bounding-boxes and
the confidence of each detection will be combined us-
ing an averaging and a weighted averaging method is
tested on a number of different combinations of en-
semble members.
4.1 Training Ensemble Members
The training of the R-FCN members will be done us-
ing Convolutional Architecture for Fast Feature Em-
bedding (Caffe) (Jia et al., 2014). This was chosen
due to the research being available from the authors
of R-FCN through training code and pre-trained Caffe
models. As there is the requirement to combine de-
tections between ensemble members, the detections
must be found based upon the same input to each
model. This is ensured by using pre-computed re-
gion proposals found using an RPN. In a standard R-
FCN the RPN is an internal part of the network and
is trained end-to-end. However, as these proposals
must be constant between all ensemble members this
method is not appropriate. Instead the networks are
trained using a method inspired by the 4-step alternat-
ing training method presented by the Faster R-CNN
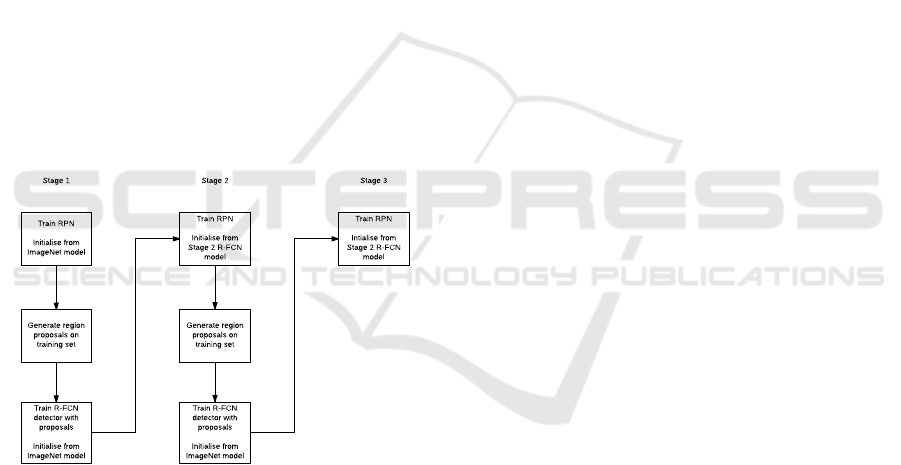
authors (Ren et al., 2015). The process can be seen in
Figure 1.
Train RPN
Initialise from
ImageNet model
Generate region
proposals on
training set
Train R-FCN
detector with
proposals
Initialise from
ImageNet model
Train RPN
Initialise from
Stage 2 R-FCN
model
Generate region
proposals on
training set
Train R-FCN
detector with
proposals
Initialise from
ImageNet model
Train RPN
Intialise from
Stage 2 R-FCN
model
Stage 1 Stage 2 Stage 3
Figure 1: Flow chart showing the alternating training
method.
In this approach the overall network in trained in
multiple steps. First, an RPN is trained to determine
region proposals, the RPN is initialised from a pre-
trained ImageNet model and fine-tuned to the pro-
posal task. Next a R-FCN is trained based upon the
proposals found in the previous step. This network is
also initialised with a pre-trained ImageNet model. In
step three, another RPN is trained but initialised using
the R-FCN from step two. In this step the convolu-
tional layers that are shared between the R-FCN and
RPN are fixed and only the layers unique to the RPN
are updated. By training a model with this approach
a testing image is able to run through the same steps
as a R-FCN trained end-to-end, however, as the net-
works are split into different models it is also possible
to use the stages of the method individually. Creating
a solution for finding region proposals with an exter-
nal RPN and having a number of R-FCNs that can
take the proposals as inputs.
An additional benefit to training R-FCNs in this
manner is that once a baseline model has been created
only one part needs to be re-trained. As the aim is to
train various ensemble members to different subsets
of data only the R-FCN in stage 2 is required to be
re-purposed. The RPN in stage 3 should be kept con-
stant based on the baseline model as it will provide
the shared proposals for test images. Therefore, once
a systematic approach has been found for splitting
data for both train and test based on the data sampling
and selection requirements the detection part of the R-
FCN can be trained towards its expert area. The fol-
lowing sections will explain how the subsets of data
will be selected.
4.1.1 Object Size Data Sampling
The area of a region proposal found with a RPN gives
an indication as to the approximate size of a poten-
tial objects. Therefore, the area for all proposals on
the training set can be computed from the output of
the second step in stage 2 shown in Figure 1. Once
the area of all proposals are computed an appropri-
ate split of the data can be determined depending on
the area distribution. The main requirement in creat-
ing the subsets of data is that equal number of ground
truth samples should be present in both.
4.1.2 Image Quality Data Sampling
There are many choices for computing the qual-
ity of an image and a popular area of research for
this purpose is Image Quality Assessment (IQA).
These methods aim to determine the subjective qual-
ity of an image. There are two forms of IQA,
Full-Reference Image Quality Assessment (FR-IQA)
and No-Reference Image Quality Assessment (NR-
IQA). FR-IQA approaches require the original, undis-
torted reference image in order to determine qual-
ity. Whereas, NR-IQA do not have this informa-
tion available (Bosse et al., 2016). As the aim is to
determine the level of image quality on one of the
benchmark datasets, no reference image is present.
Therefore, an NR-IQA method is required. Current
state-of-the-art within NR-IQA is also deep learn-
ing based and works are typically trained on IQA
datasets. Datasets include Laboratory for Image &
Video Engineering (LIVE) dataset (Sheikh et al.,
2006) (Sheikh et al.,), TID2013 (Ponomarenko et al.,
2013) and CSIQ (Larson and Chandler, 2009). The
datasets consist of source reference image and have
artificially created counterparts with varying levels of
distortion. Distortions include, such as in the LIVE
dataset, JPEG2000 compression, JPEG compression,
additive white Gaussian noise, Gaussian blur and bit
errors from a fast fading Rayleigh channel. Mod-
els can then be trained to predict subjective quality
based on ground truth user determined quality mea-
surement.
Based upon this, an NR-IQA method can be used
to determine the level of image quality with respect
to a number of different distortions. Then as in ob-
ject size training the data will be split into appropriate
training subsets.
4.1.3 R-FCN Training
Training of the baseline R-FCN model shown in
Figure 1 is done using Stochastic Gradient Descent
(SGD) optimisation with largely the same parameters
across the five different training parts. The parameters
are adapted from (Dai et al., 2016). All models start
with a base learning rate of 0.001 which is dropped
by a factor of 0.1 once in the process. This is done af-
ter 80,000 iterations for the R-FCN models and after
60,000 for the RPNs. The learning rate is controlled
with a momentum of 0.9 and weight decay of 0.0005.
The two R-FCN models are trained for 120,000 iter-
ations, while the three RPNs are trained for 80,000.
The only data augmentation used in training is hor-
izontal flipping of images, effectively creating dou-
ble the amount of training examples. Additionally,
Online Hard Example Mining (OHEM) (Shrivastava
et al., 2016) is used in the training process.
5 RESOLUTION-AWARE
ENSEMBLE MEMBERS
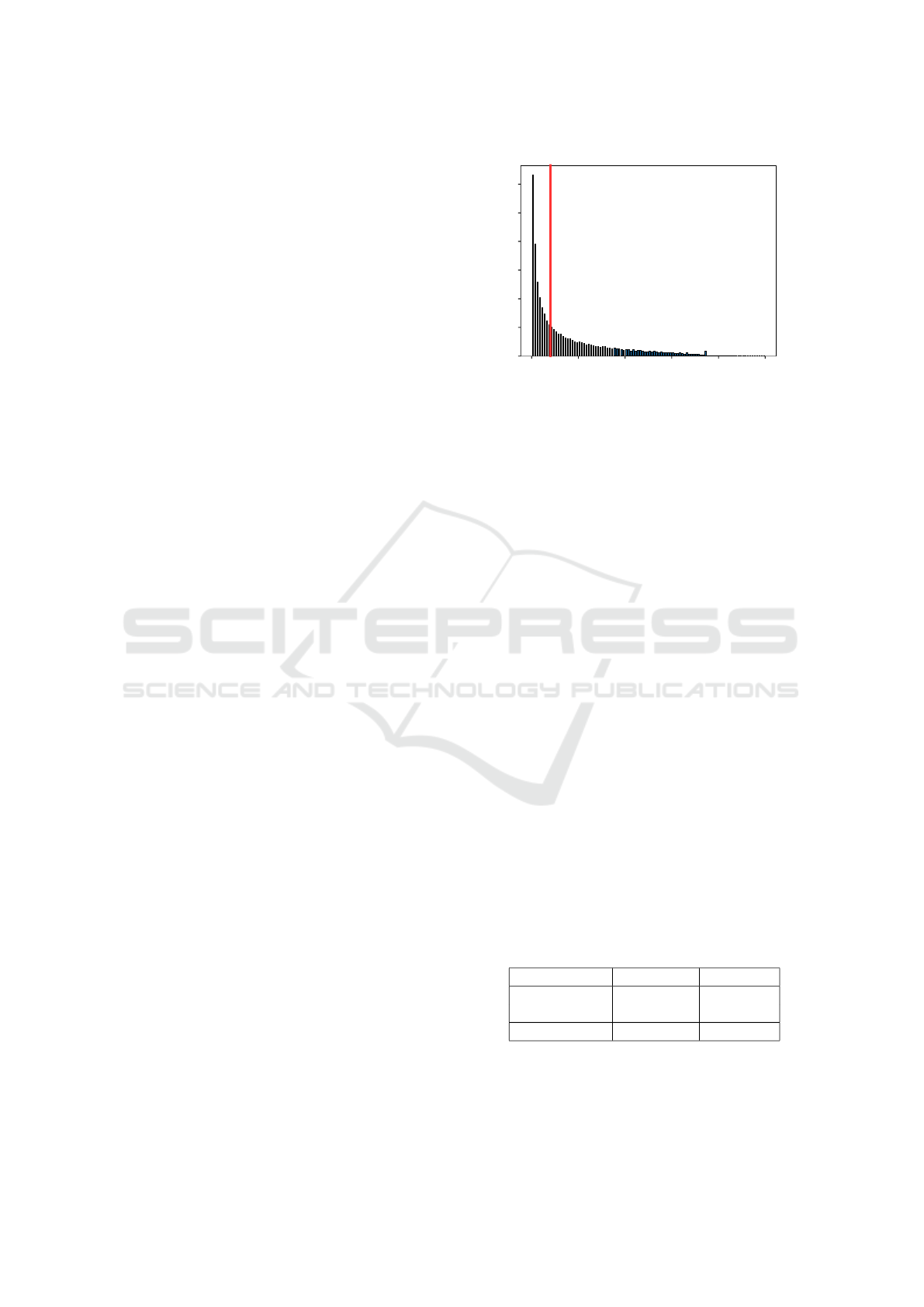
To determine an appropriate split of data the distribu-
tion of the ground truth bounding boxes area from the
07+12 set was analysed. This was done by parsing all
of the bounding box coordinates in the set and calcu-
lating the area. A histogram of the all of the ground
truth areas can be seen in Figure 2. There is a clear
tendency to smaller objects in the training set with a
clear skew towards the left of the figure. The data in
Figure 2 can be split into two equal subsets if the me-
dian area of 19,205.5 is used as indicated by the red
line.
However as mentioned, the ensemble R-FCN
members are trained with region proposal inputs of
both ground truth positives and negative examples
0 50000 100000 150000 200000 250000
Area
0
2000
4000
6000
8000
10000
12000
Frequency
PASCAL VOC 07+12 Bounding Box Area
Figure 2: Histogram of the PASCAL VOC 07+12 bounding
box area.
found using a RPN as per the multiple step training
scheme. A potential shortcoming of using propos-
als as inputs to training ensemble members is a RPN
finds many more examples of possible objects than
actually are present. Ground truths are determined by
setting the proposals with the highest confidence as
the ground truth examples and labelling the remain-
ing proposals as the background class. This creates
a large difference in the number of samples in com-
parison to the end-to-end training approach. The total
number of training examples is increased from 80,116
ground truth object instances to 9,979,345 region pro-
posals. The median of the almost 10 million propos-
als is 4,684 pixels, a significantly less than 19,205.5
determined using only ground truth boxes. If the sub-
sets were split by the median of all RPN proposals
(4,684), the two sets of data would have equal num-
bers of examples. However, there appears to be a
large skew in RPN proposals to smaller objects and
therefore there significantly more ground truth sam-
ples in the subset of data containing larger objects.
This can be seen in Table 1, where despite there being
an almost even split in data subsets there are signifi-
cantly more ground truth annotations in the RPN
larger
subset.
Table 1: Creating object resolution data subsets. If split
by the median area of all region proposals training samples
the larger dataset has significantly more ground truth object
instance samples.
Data RPN
smaller
RPN
larger
Ground Truth 19,992 60,116
Background 4,969,369 4,929,297
Total 4,989,361 4,989,413
Another option is to use the median of 19,205.5
found on only ground truth boxes. The data distribu-
tion based on this threshold can be seen in Table 2.
In this instance there is significantly more data in the
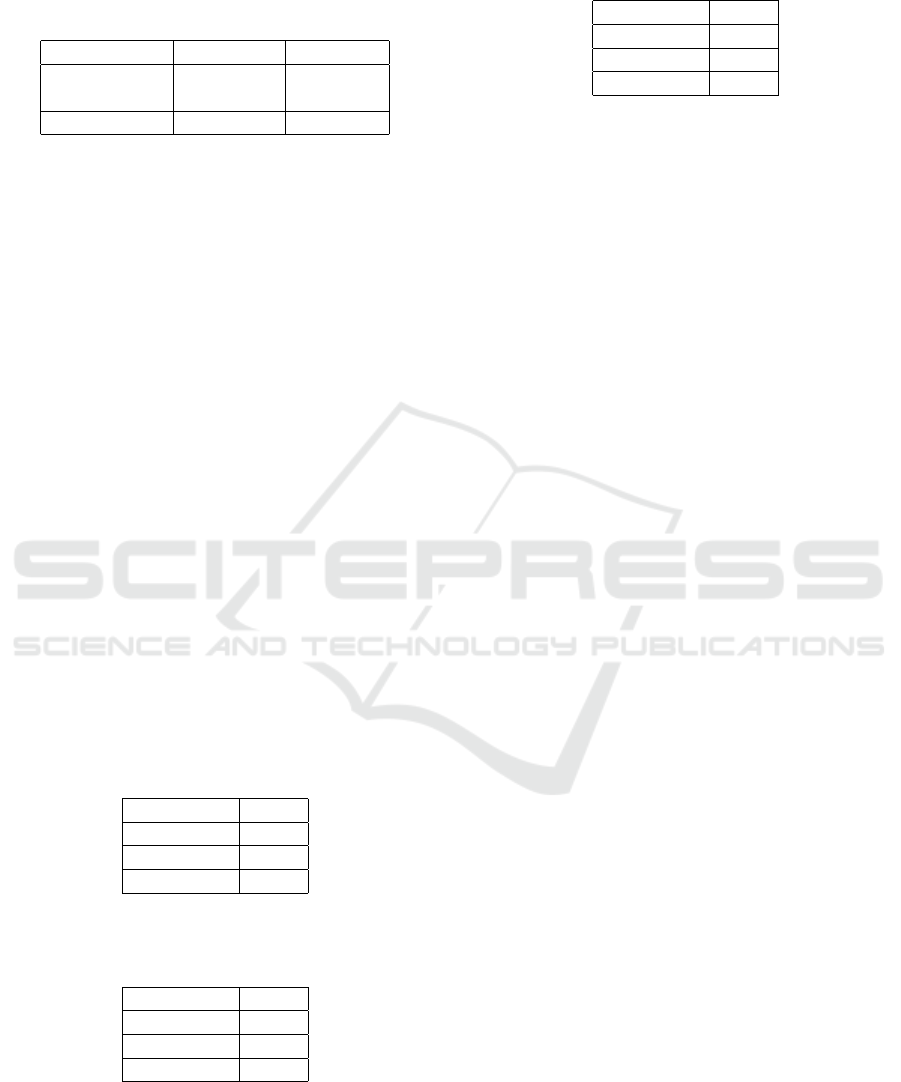
Table 2: Creating object resolution data subsets. If split
by the median of area from ground truth objects there
is an equal number of ground truth instances. However,
RPN
larger
has significantly more background samples.
Data RPN
smaller
RPN
larger
Ground Truth 40,058 40,058
Background 3,528,370 6,370,859
Total 3,568,428 6,410,917
RPN
larger
subset, however, the skew is solely due to
the many more background examples. The ground
truth annotations are shared equally with 40,058 sam-
ples in each.
As the overall goal of object detectors is to find
objects within the classes, the decision was made to
use the threshold of 19,205.5 to create the split in data,
despite there being significantly more background ex-
amples in one of the datasets.
The R-FCN ensemble members were trained on
the two subsets of RPN. To evaluate how well the
expert resolution members perform on the respective
subsets of data tests were performed on splits of the
07 test data. This data was split by using the same me-
dian threshold of 19,205.5 used in creating the train-
ing subsets. Firstly, the results for small objects from
07 test can be seen in Table 3. Shown are R-FCNs
trained on RPN
smaller
, RPN
larger
and a baseline model
trained on all 07+12 data. The table shows that the
model trained towards smaller object proposals on
RPN
smaller
performs best. This trend is similarly true
for large objects as seen in Table 4. Finally, for all
ground truth objects the baseline model is the best
performing as seen in Table 5.
Table 3: Results for R-FCN models trained on three differ-
ent subsets of data and tested on only small objects from the
07 test set.
Train Data AP
RPN
smaller
55.00
RPN
larger
20.92
07+12 43.80
Table 4: Results for R-FCN models trained on three differ-
ent subsets of data and tested on only large objects from the
07 test set.
Train Data AP
RPN
smaller
21.28
RPN
larger
81.81
07+12 75.14
5.1 Image Quality Ensemble Members
To evaluate the amount of distortion in the PAS-
CAL VOC dataset a method for IQA is needed. A
Table 5: Results for R-FCN models trained on three differ-
ent subsets of data and tested on all of the 07 test set.
Train Data AP
RPN
smaller
46.74
RPN
larger
62.48
07+12 79.59
recent state of the art method is that of deep IQA
(Bosse et al., 2016). Deep IQA is a CNN-based No-
Reference (NR) IQA method that can be trained to
measure the subjective visual quality of an image.
Deep IQA consists of 14 convolutional layers, 5 max-
pooling layers and 2 fully-connected layers. The con-
volutional layers are all 3×3 convolution kernels and
activated using Rectified Linear Unit (ReLU). Inputs
to each convolutional layer are zero-padded to ensure
output size is equal to the input. Max-pooling layers
consist of 2 × 2 sized kernels. The network is trained
on mini-batches of 32 × 32 patches. During infer-
ence non-overlapping patches are sampled from the
image and image quality scores are predicted for each
instance. The patch scores are averaged for the final
score for the entire image.
Deep IQA models were trained using the Chainer
framework (Tokui et al., 2015) as code and a model
trained for all distortions types on the LIVE dataset
were available from the deep IQA authors. How-
ever, to create a more powerful ensemble models were
fine-tuned from the model provided towards each of
the 5 distortions in the LIVE. The training settings
are the same as in the deep IQA work apart from
the number of epochs in training. As fine-tuning can
drastically decrease training time the epochs were de-
creased from 3,000 to 500.
The models for each distortion type are run
through the 07+12 dataset in order to give an indica-
tion to the respective distributions. The distributions
can been seen in the histograms in Figure 3.
The distribution for white noise and Gaussian blur
is skewed towards a higher image quality and also to a
lesser extent in fast fading. Whereas the image quality
for compression distortions is somewhat of a Gaus-
sian nature. For determining an appropriate manner
to split the data the same constraints are made as in
that for object sizes, namely that both subsets of data
should have an equal number of ground truths to train
on. Again using the median for each of the five distri-
butions can satisfy this. The respective medians can
be seen in Table 6 and are shown by the red lines in
Figure 3.
It does not appear feasible to create subsets of data
for white noise image quality on 07+12. The combi-
nation of both the heavy skew and half of the data
lying below 0.599 indicates that a minimal amount
0 5 10 15 20 25 30 35
IQ
0
2000
4000
6000
8000
10000
Frequency
PASCAL VOC 07++12 White Noise Distribution
White Noise
0 10 20 30 40 50 60
IQ
0
500
1000
1500
2000
2500
3000
3500
4000
Frequency
PASCAL VOC 07++12 Gaussian Blur Distribution
Gaussian Blur
0 10 20 30 40 50 60 70 80
IQ
0
250
500
750
1000
1250
1500
1750
2000
Frequency
PASCAL VOC 07++12 JPEG Compression Distribution
JPEG
0 20 40 60 80 100 120
IQ
0
250
500
750
1000
1250
1500
1750
Frequency
PASCAL VOC 07++12 JP2K Compression Distribution
JP2K
0 10 20 30 40 50 60 70
IQ
0
200
400
600
800
1000
1200
1400
Frequency
PASCAL VOC 07++12 Fast Fading Distribution
Fast Fading
Figure 3: Histograms representing the distribution of image quality for the five distortions trained from the LIVE image
quality dataset. The distortions shown are white noise (a), Gaussian blur (b), JPEG compression (c), JP2k compression (d),
fast fading (e).
Table 6: Median values used for each distortion type to cre-
ate even subsets of training data from 07+12.
Distortion Type Median
White Noise 0.599
Gaussian Blur 5.607
JPEG Compression 15.660
JP2K Compression 11.747
Fast Fading 13.373
of white noise distortion is present. Therefore, this
distortion is not considered for part of the ensemble.
While the Gaussian blur image quality is also skewed
it is similar to that of the the object sizes and therefore
is deemed appropriate to split based upon its median
of 5.607. The remaining distributions are much less
skewed and a total of eight R-FCN models will be
trained for the high and low levels of image quality
for the distortions Gaussian blur, JPEG compression,
JP2K compression and fast fading. Therefore, in total
there will be ten R-FCN models trained including the
two for smaller and larger object sizes.
As in the resolution-aware R-FCN networks in-
dividual tests are run to evaluate whether or not the
models trained on the above data are candidate ex-
perts. The 07 test set is split into lower and upper
subsets for each distortion type according to their re-
spective medians. The two respective experts trained
on each of their subset and the baseline R-FCN model
are evaluated on their respective subsets. Similar re-
sults are not found in this instance as in the object
resolution experts. For each of the 5 distortions both
of the trained experts perform very similarly and are
generally 3-4 AP lower than the R-FCN model trained
on all of the data. Regardless of this result the follow-
ing section will present a method to ensemble these
members as they may still complement each other.
6 COMBINING THE ENSEMBLE
MEMBERS
The two strategies, average and weighted average, for
combining the ensemble members will be described
in this section. The method for inferring each test
image will be the same apart from the combination
step. For a given object proposal each network will
infer a bounding box and associated confidence for
all classes. After this the given ensemble combina-
tion method determines the final detection where the
confidence and the four corners of the bounding box
will be averaged.
6.1 Average Ensemble
Each of the five ensemble factors are weighted evenly
in the overall ensemble. Within each ensemble factor
pair, the detection for one of the pairs will be cho-
sen and the other discarded. This is determined by
where the given factor lies for the test image in rela-
tion to the training data distribution. For example, if
it is measured that an image with a deep IQA model
to have JPEG compression below the threshold used
to split the data, then the detection found using the
model trained on that data will be used. This results
in five detections that will be weighted equally to find
the final detection by:
E
j
=
1
n
n
∑
i=1
p
i, j
(1)
where n is the number of detections found by the n en-
semble factor, p is the detection result to be averaged
and i represents one of the ensemble factors. Finally,
j is one of the five values found by each detection,
namely the four corners of the bounding-box and the
associated confidence.
6.2 Weighted Average Ensemble
As in the average ensemble, each of the 10 trained
networks will be used on all object proposals found
using the RPN. Between factors, weights are dis-
tributed evenly across each of the five different types
of factors as in the average ensemble. The weighted
average ensemble is determined for each bounding
box and the associated confidence by:

E
j
=
1
n
n
∑
i=1
w
i
p
i, j
(2)
where w
i
is the weight for a given detec-
tion.Weights are determined in pairs for each of the
5 ensemble factors, where the total sum of weights
is equal to n. If each detection were to be weighted
equally all w would be equal to 1. As the weights
are calculated in pairs each ensemble factor is overall
weighted equally as the pair of weights can at most
be equal to 2. By using this tactic, detections between
ensemble members can be weighted differently but
each factor is weighted equally. Weights for a given
factor are found according to where the the test image
lies for that factors training data distribution.
If the image factor result f
i
, for example proposal
size, is below the value used to split the data the
weights are calculated for the detection found with
the given lower network by:
w
Lower
= 1 +
median
i
− f
i
median
i
− min f
i
(3)
and the weight for the upper network w
U pper
by:
w
U pper
= 2 − w
Lower
(4)
where median
i
is the value used to split the train-
ing data and min f
i
is the minimum quality for the
given factor in the training set.
However, if the quality is above split the w
U pper
is calculated by:
w
U pper
= 2 −
max f
i
− f
i
max f
i
− median
i
(5)
and lower weight w
Lower
:
w
Lower
= 2 − w
U pper
. (6)
It should also be noted that outliers are not in-
cluded for the calculation of min f
i
and max f
i
by re-
moving the values below the 1% and above the 99%
percentile. This ensures that the weighing of factors
is not too heavily affected by outlier values.
7 EXPERIMENTAL RESULTS
In this section the results for the two aforementioned
ensemble combinations strategies will be presented.
When appropriate the result for the baseline R-FCN
ResNet-101 model trained on all of the 07+12 training
data and will be presented and denoted as Baseline.
The results presented will be on the 07 PASCAL VOC
test set as also shown in earlier preliminary results in
this report.
Table 7: Results for the two ensemble combination strate-
gies and for the baseline model on the 07 test set.
Method AP
Average 79.45
Weighted Average 79.47
Baseline (Dai et al., 2016) 79.59
Faster R-CNN (He et al., 2015) 76.4
YOLOv2 (Redmon and Farhadi, 2016) 78.6
The results for both combination strategies using
10 ensemble members can be seen in Table 7.
While neither of the combinations provide an im-
provement over the baseline method, both have an in-
crease in performance in comparison to their respec-
tive image quality expert results.
To the evaluate the contribution of both the eight
quality factor ensemble members and the two resolu-
tion members these were combined separately based
on the two strategies. By separating the quality and
resolution members the performance decreases by
roughly 1.0 for both in comparison the the average
ensemble result. This appears to indicate that the two
complement each other well and have their own ex-
pertise for this problem. The weighted average com-
bination strategy does not show as large of a decrease
in performance for image quality as the average com-
bination does, however, there is still a drop from 79.47
to 79.04. There is also a decrease in performance for
the two resolution members showing an AP of 77.84
on the test set. This seems to show that the addition
of weighing individual detections based on proposal
size as a poorer approach. There appears to be an in-
dication that image quality members are well suited to
adding a weight to detection. Whereas, the resolution
members are better suited to simply taking the detec-
tion from the appropriate model. The results for this
can be seen in Table 8 where both combinations are
tested. The two strategies are shown as either Image
Quality or Resolution followed by the subscript
Avg
or
WAvg
indicating the combination strategies of average
or weighted average respectively.
Table 8: Results for the the image quality ensemble mem-
bers and resolution members with both combinations of av-
erage and weighted average on the 07 test set.
Ensemble Members AP
Image Quality
WAvg
/ Resolution
Avg
79.83
Image Quality
Avg
/ Resolution
WAvg
79.17
Baseline (Dai et al., 2016) 79.59
Faster R-CNN (He et al., 2015) 76.4
YOLOv2 (Redmon and Farhadi, 2016) 78.6
Results in Table 8 show that by using separate
strategies where image quality members are weighted

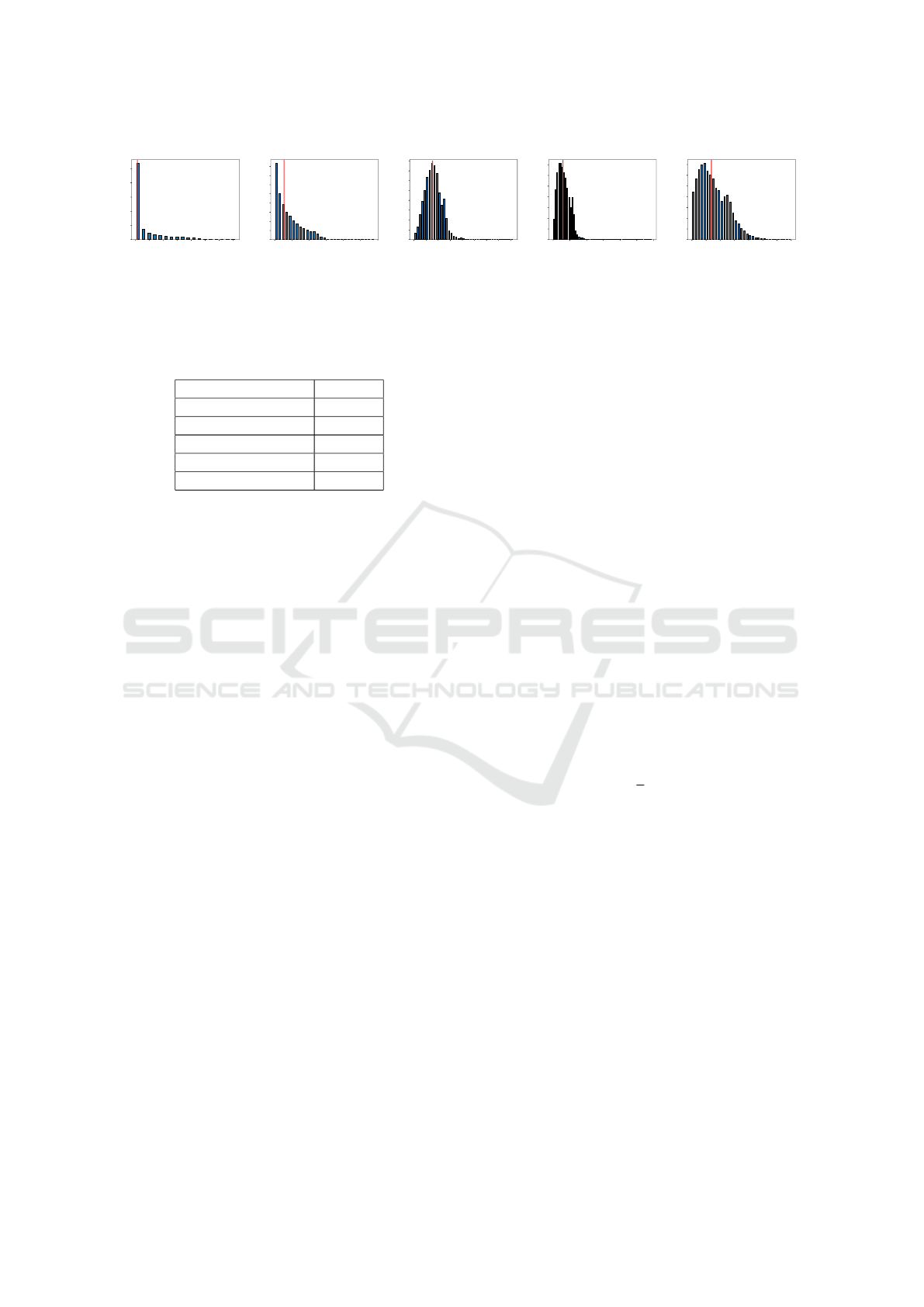
Figure 4: Detections for the bird class from an image in the 07 test set. Shown are the bounding boxes for the ground truth
annotation, baseline, Resolution
base
(Res) and Image Quality
WAvg
/ Resolution
Avgbase
(IQ / Res). The Intersection-Over-Union
(IoU) between the ground truth and bounding box is shown in parentheses for each method.
and when resolution members are averaged only in-
creases the performance. Additionally, the perfor-
mance surpasses the baseline model.
The results so far have only been with different
combinations of the expert ensemble members. An-
other strategy is to include the baseline model trained
on all of the 07+12 data. As the baseline model per-
forms well by itself the other ensemble members will
act as support It should be noted that as there is no
complementary member to the baseline. Therefore,
its detections are weighted by 1.0 regardless of en-
semble combination strategy. Firstly, the results for
the average and weighted average ensemble can be
seen in Table 9. The inclusion of the baseline model is
shown by the subscript
base
. Performance is increased
in both cases, the weighted average is increased by
0.22. While the average strategy is increased by 0.43.
Table 9: Results for the two ensemble combination strate-
gies and for the baseline model on the 07 test set. Shown
is both the results with the expert ensemble members only
and experts plus the baseline model.
Method AP
Average 79.45
Average
base
79.88
Weighted Average 79.47
Weighted Average
base
79.69
Baseline (Dai et al., 2016) 79.59
Faster R-CNN (He et al., 2015) 76.4
YOLOv2 (Redmon and Farhadi, 2016) 78.6
The addition of the baseline model to the ensem-
ble using different strategies for the two factors can
be seen in Table 10. This provided the best result of
any ensemble combination. Image quality with the
weighted average and resolution with average ensem-
ble results in 80.09, an increase of 0.50 in comparison
to the baseline R-FCN.
The AP results for each category for the Image
Quality
WAvg
/ Resolution
Avgbase
ensemble can be seen
in Table 11. The tables show results for the baseline
model, the given ensemble method and the difference
Table 10: Results for the the image quality ensemble mem-
bers and resolution members with both combinations of av-
erage and weighted average on the 07 test set. Shown is
both the results with the expert ensemble members only and
experts plus the baseline model.
Ensemble Members AP
Image Quality
WAvg
/ Resolution
Avg
79.83
Image Quality
WAvg
/ Resolution
Avg
base
80.09
Image Quality
Avg
/ Resolution
WAvg
79.17
Image Quality
Avg
/ Resolution
WAvg
base
79.54
Baseline (Dai et al., 2016) 79.59
Faster R-CNN (He et al., 2015) 76.4
YOLOv2 (Redmon and Farhadi, 2016) 78.6
between the two for a given class.
Finally, two examples of detections can be seen in
Figure 4. For both instances, on the left is the full size
image and right a zoomed version of the object and
detections. The detections shown are for the ground
truth annotation, baseline, Resolution
base
(Res) and
Image Quality
WAvg
/ Resolution
Avgbase
(IQ / Res). Ad-
ditionally, shown in parentheses in the legend is the
IoU between the ground truth and detection for the
given method.
8 CONCLUSION AND FUTURE
WORK
This work has presented a method for creating an en-
semble of R-FCNs trained towards object resolution
and image quality using the PASCAL VOC dataset. If
combined appropriately an improvement against the
standard R-FCN method can be obtained. Address-
ing items such as the skew in factor distributions data
may help create better individual members and create
a stronger ensemble.
This work uses R-FCN as the backbones, how-
ever, any object detection method could be used and
shows the possibilities of engineering towards spe-
cific challenges in object detection.
Table 11: Results for the individual classes in the 07 test set. Shown are the results for the baseline model and Image
Quality
WAvg
/ Resolution
Avgbase
. Additionally the difference between the two methods are presented for a given class.
Model aero bike bird boat bottle bus car cat chair cow
Baseline (Dai et al., 2016) 80.53 84.59 79.89 71.52 67.54 87.22 87.59 87.98 65.15 87.11
Image Quality
WAvg
/
Resolution
Avgbase
80.57 85.45 81.02 72.51 68.69 88.00 87.38 89.13 67.27 86.57
Difference +0.04 +0.86 +1.13 +0.99 +1.15 +0.78 -0.21 +1.15 +2.12 -0.54
Model table dog horse mbike person plant sheep sofa train tv
Baseline (Dai et al., 2016) 73.66 88.61 87.83 83.21 79.87 54.60 84.07 80.03 83.60 77.17
Image Quality
WAvg
/
Resolution
Avgbase
72.21 88.75 87.04 84.15 80.17 53.97 83.56 80.11 86.62 78.64
Difference -1.45 +0.14 -0.79 +0.95 +0.30 -0.63 -0.51 +0.08 +3.02 +1.47
REFERENCES
Bosse, S., Maniry, D., M
¨
uller, K., Wiegand, T., and Samek,
W. (2016). Deep neural networks for no-reference
and full-reference image quality assessment. CoRR,
abs/1612.01697.
COCO, M. (2017). Ms coco detections leaderboard.
Dai, J., Li, Y., He, K., and Sun, J. (2016). R-FCN: object de-
tection via region-based fully convolutional networks.
CoRR, abs/1605.06409.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., and Zisserman, A. (2010). The pascal visual ob-
ject classes (voc) challenge. International Journal of
Computer Vision, 88(2):303–338.
Girshick, R. (2015). Fast R-CNN. In Proceedings of the
International Conference on Computer Vision (ICCV).
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Huang, J., Rathod, V., Sun, C., Zhu, M., Korattikara, A.,
Fathi, A., Fischer, I., Wojna, Z., Song, Y., Guadar-
rama, S., and Murphy, K. (2016). Speed/accuracy
trade-offs for modern convolutional object detectors.
CoRR, abs/1611.10012.
Jia, Y., Shelhamer, E., Donahue, J., Karayev, S., Long, J.,
Girshick, R., Guadarrama, S., and Darrell, T. (2014).
Caffe: Convolutional architecture for fast feature em-
bedding. arXiv preprint arXiv:1408.5093.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Pereira, F., Burges, C. J. C., Bottou,
L., and Weinberger, K. Q., editors, Advances in Neu-
ral Information Processing Systems 25, pages 1097–
1105. Curran Associates, Inc.
Larson, E. and Chandler, D. M. (2009). Consumer subjec-
tive image quality database.
Li, Y., Qi, H., Dai, J., Ji, X., and Wei, Y. (2016). Fully
convolutional instance-aware semantic segmentation.
CoRR, abs/1611.07709.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft COCO: Common Objects in Context, pages
740–755. Springer International Publishing, Cham.
Ponomarenko, N., Ieremeiev, O., Lukin, V., Egiazarian, K.,
Jin, L., Astola, J., Vozel, B., Chehdi, K., Carli, M.,
Battisti, F., and Kuo, C. C. J. (2013). Color image
database tid2013: Peculiarities and preliminary re-
sults. In European Workshop on Visual Information
Processing (EUVIP), pages 106–111.
Redmon, J. and Farhadi, A. (2016). YOLO9000: better,
faster, stronger. CoRR, abs/1612.08242.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. In Neural Information Processing
Systems (NIPS).
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Schroff, F. (2009). Semantic Image Segmentation and Web-
supervised Visual Learning. University of Oxford.
Sheikh, H. R., Sabir, M. F., and Bovik, A. C. Live image
quality assessment database release 2.
Sheikh, H. R., Sabir, M. F., and Bovik, A. C. (2006). A sta-
tistical evaluation of recent full reference image qual-
ity assessment algorithms. IEEE Transactions on Im-
age Processing, 15(11):3440–3451.
Shrivastava, A., Gupta, A., and Girshick, R. B. (2016).
Training region-based object detectors with online
hard example mining. CoRR, abs/1604.03540.
Simonyan, K. and Zisserman, A. (2015). Very deep convo-
lutional networks for large-scale image recognition. In
ICLR.
Szegedy, C., Ioffe, S., and Vanhoucke, V. (2016). Inception-
v4, inception-resnet and the impact of residual con-
nections on learning. CoRR, abs/1602.07261.
Tokui, S., Oono, K., Hido, S., and Clayton, J. (2015).
Chainer: a next-generation open source framework for

deep learning. In Proceedings of Workshop on Ma-
chine Learning Systems (LearningSys) in The Twenty-
ninth Annual Conference on Neural Information Pro-
cessing Systems (NIPS).
Uijlings, J. R. R., van de Sande, K. E. A., Gevers, T., and
Smeulders, A. W. M. (2013). Selective search for ob-
ject recognition. International Journal of Computer
Vision, 104(2):154–171.
Zhang, C. and Ma, Y. (2012). Ensemble Machine Learning.
Springer US.
Zhang, X., Yang, Y.-H., Han, Z., Wang, H., and Gao, C.
(2013). Object class detection: A survey. ACM Com-
put. Surv., 46(1):10:1–10:53.
