
Concise Finite-Domain Representations for Factored MA-PDDL
Planning Tasks
Daniel Fi
ˇ
ser and Anton
´
ın Komenda
Department of Computer Science, Faculty of Electrical Engineering, Czech Technical University, Prague, Czech Republic
Keywords:
Multi-Agent Planning, Finite-Domain Representation, State Invariants, Mutex Groups.
Abstract:
Planning tasks for the distributed multi-agent planning in deterministic environments are described in highly
expressive, but lifted, languages, similar to classical planning. On the one hand, these languages allow for the
compact representation of exponentially large planning problems. On the other hand, the solvers using such
languages need efficient grounding methods to translate the high-level description to a low-level representation
using facts or atomic values. Although there exist ad-hoc implementations of the grounding for the multi-
agent planning, there is no general scheme usable by all multi-agent planners. In this work, we propose such a
scheme combining centralized processes of the grounding and the inference of mutex groups. Both processes
are needed for the translation of planning tasks from the Multi-agent Planning Description Language (MA-
PDDL) to the finite domain representation. We experimentally show a space reduction of the multi-agent finite
domain representation in contrast to the binary representation on the common benchmark set.
1 INTRODUCTION
The problem of decision making is one of the core
areas in the spotlight of the artificial intelligence re-
search from its early days. Classical planning for-
malizes and proposes algorithmic solutions for prob-
lems where the decisions has to be made in a sequence
and in an environment known beforehand. The (dis-
tributed) multi-agent planning stemmed from the clas-
sical planning research and it focuses on sequential
decision making of cooperative agents and in a deter-
ministic environment. The domain-independent na-
ture of multi-agent planning requires from the solvers
to be able to efficiently plan for problems in various
domains as logistics, transportation, manufacturing,
multi-robotic systems, space, or military missions.
To this date, several multi-agent planners were
proposed, implemented and compared to each other at
the Competition of Distributed and Multi-agent Plan-
ners (Komenda et al., 2016). All competing planners
were obliged to use a common input language for
multi-agent planning—MA-PDDL (Kovacs, 2012),
which became de-facto standard. In order to provide
high expressiveness, the language describes the input
planning problem in a high-order representation that
is not directly used for planning. That is why, to our
best knowledge, all existing multi-agent planners use
a process called grounding, which enumerates possi-
ble decisions (actions) required for solving the plan-
ning problem. The process has to be efficient and
complete in the sense that it does not miss to ground
any action needed in the solution of the problem.
The grounding process in the existing distributed
multi-agent planners, namely MAPlan (Fi
ˇ
ser et al.,
2015), PSM planner (Tozicka et al., 2016), and
FMAP (Torre
˜
no et al., 2014) is based on imple-
mentation of the classical planning suite Fast Down-
ward (Helmert, 2006). The grounding in Fast Down-
ward is well tested and reasonably efficient, however
it is not directly usable in the multi-agent planning as
it is not designed as a distributed algorithm. Its bene-
fit is that it grounds the high-order representation into
grounded finite-domain representation, which is not
limited to binary facts as in the well-known STRIPS
model (Bylander, 1994). To ground a planning task to
the finite-domain representation, the algorithm finds
out, what values cannot hold together in one state.
(Helmert, 2006) proposes one such mutex group infer-
ence mechanism, which is again, not directly usable
for the multi-agent planning.
In this paper, we propose a novel and general
scheme for the translation of high-order multi-agent
problems in MA-PDDL to the finite-domain repre-
sentation. The scheme uses centralized processes of
grounding and inference of mutex groups as black
boxes implementable by various existing techniques.
306
Fišer, D. and Komenda, A.
Concise Finite-Domain Representations for Factored MA-PDDL Planning Tasks.
DOI: 10.5220/0006539503060313
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 2, pages 306-313
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 FACTORED MA-PDDL
The Planning Domain Definition Language (PDDL)
is the de-facto standard language for representing
classical planning tasks. PDDL was introduced for
the first International Planning Competition (IPC) in
1998 (McDermott, 2000). PDDL is based on a sub-
set of predicate logic and uses the LISP syntax for
describing planning tasks (Fig. 2 lists an example
PDDL). As PDDL was extended in many ways, most
applications of PDDL uses only selected fragments.
Since PDDL is in a lifted (parameterized) form,
it is able to represent (exponentially) large planning
tasks compactly. In PDDL, a planning task describes
a model of a world in terms of objects, predicates
describing relations between the objects, and actions
that manipulate these relations. The elements are de-
scribed in the :objects, :predicates, and :action
LISP expressions, respectively. The parameters are
prefixed by ? and typically limited by types using the
syntax ?parameter - type. The actions are defined
over two expressions: :precondition and :effect.
The :precondition expression is a logical formula
describing the condition of applicability of the action.
The :effect expression is a logical formula describ-
ing the result after application of the action. To solve a
planning task, the planning algorithm—the planner—
has to find a sequence of instantiated actions from
the initial state (the PDDL expression :init) to one
of the final states described by the goal specification
(the PDDL expression :goal). Most of the existing
planners translate the input PDDL specification into a
propositional representation by grounding the predi-
cates and actions. The process of grounding generates
possible instantiations of the predicates and actions
using the world objects. Such grounded facts (from
predicates) and grounded actions are later used in the
planning algorithm to find a solution. Some plan-
ners go even further and construct more concise rep-
resentation (requiring smaller amount of bits), such
as the finite domain representation (FDR) or SAS
+
(B
¨
ackstr
¨
om and Nebel, 1995), using inferred invari-
ants over reachable parts of the state space. FDR uses
assignment of values to variables describing the facts
which hold in a state of the world. As only one value
from the finite domain of possible values can be as-
signed to a variable, the representation has to assure
there is no reachable state requiring more than one
value assigned. This process is based on automated
inference of mutually exclusive sets of facts invariant
over the reachable fragment of the planning task.
The MA-PDDL extension of PDDL for multi-
agent planning was proposed by (Kovacs, 2012). In
its original version, it included many aspects inherited
Figure 1: A schema of a simple logistic problem.
from PDDL, which were not necessary for the min-
imalistic multi-agent planning model MA-STRIPS,
proposed by (Brafman and Domshlak, 2008), which
is used as the prevalent grounded planning model and
as a basis for the multi-agent finite domain repre-
sentations. Additionally, the original MA-PDDL did
not describe privacy of facts and actions, which is a
fundamental part of the MA-STRIPS model. There-
fore the original MA-PDDL was simplified to a vari-
ant used in CoDMAP. The CoDMAP variant of MA-
PDDL defines only two additional aspects to PDDL:
(i) partitioning of the planning task to multiple agents
and (ii) privacy of objects, predicates, and implicitly
privacy of actions (for more details see (Komenda
et al., 2016)). The MA-PDDL extension allows for
defining agents in various ways, but most notably as
the world objects. This principle simplifies reuse of
many existing single-agent planning tasks.
In factored MA-PDDL, each planning agent uses
its own planning sub-task, denoted as a MA-PDDL
factor. A MA-PDDL factor is defined by a pair of do-
main and problem description files which define in-
formation relevant only to one particular agent. Fig. 1
depicts a simple multi-agent logistics planning prob-
lem. The domain and problem MA-PDDL files (fac-
tors) of the example problem are listed in Fig. 2.
There are two agents representing a truck (truck) and
an airplane (airplane) transporting a package (pkg).
The initial state of the planning task is depicted in
the figure and the goal condition is that the package
pkg is moved to the location C. truck can move only
between the locations A and B and airplane can fly
only between B and C. Both vehicles can load or un-
load pkg at the location where the package is present
or if it is in the vehicle, respectively. The solution to
the problem is simply to load pkg by truck at A, drive
truck from A to B, unload the package at B, load it by
the airplane at B, fly the airplane to C and unload the
package at C from airplane.
The actions grounded from the lifted actions in the
MA-PDDL factors are partitioned to the agents based
on the decomposition of the planning task. Public
facts, objects, and constants which are common for
more than one agent are bound over the same names.
For instance the pkg - package of the truck agent,
in the example, is the same package as pkg in the
Concise Finite-Domain Representations for Factored MA-PDDL Planning Tasks
307

The domain definition for both the truck and the airplane
agent:
(define (domain logistics-truck)
(:requirements :factored-privacy :typing)
(:types location vehicle package)
(:predicates
(at ?obj - object ?loc - location)
(in ?obj1 - package ?v - vehicle)
(:private
(in-city ?v - vehicle ?loc - location)
)
)
(:action load
:parameters
(?v - vehicle ?p - package ?l - location)
:precondition
(and (in-city ?v ?l) (at ?p ?l))
:effect
(and (not (at ?p ?l)) (in ?p ?v))
)
(:action unload
:parameters
(?v - vehicle ?p - package ?l - location)
:precondition
(and (in-city ?v ?l) (in ?p ?v))
:effect
(and (not (in ?p ?v)) (at ?p ?l))
)
(:action move
:parameters
(?v - vehicle ?f - location ?t - location)
:precondition (in-city ?v ?f)
:effect
(and (not (in-city ?v ?f))
(in-city ?v ?t))
)
)
The problem definition for the truck agent:
(define (problem logistics-truck)
(:domain logistics-truck)
(:objects
pkg - package B - location
(:private A - location truck - vehicle)
)
(:init (at pkg A) (in-city truck A))
(:goal (in-city truck A))
)
The problem definition for the airplane agent:
(define (problem logistics-airplane)
(:domain logistics-airplane)
(:objects
pkg - package B - location
(:private
C - location airplane - vehicle)
)
(:init (in-city airplane C))
(:goal (at pkg C))
)
Figure 2: A simple logistic problem as factored MA-PDDL.
factored problem description of the airplane agent.
The :private blocks specify what predicates and ob-
jects has to be treated secret of the agents. Privacy
grounding rules (Komenda et al., 2016) and decom-
position then specifies whether the grounded facts and
actions have to be private or public. To stress that a
factored MA-PDDL is a result of factoring (and thus
may contain :private declarations), the requirement
:factored-privacy is used in the domain file.
3 FACTORED MA-FDR
A factored MA-FDR problem is a pair M = hA =
{1, ..., n}, Π = {Π
i
}
i∈A
i, where A is a set of agents
and Π is a set of individual factors—each factor corre-
sponding to an individual problem for each agent. An
MA-FDR factor of an agent i is a tuple Π
i
= hV
i
=
V
pub
∪ V
priv
i
, O
i
, I
i
, G
i
i.
V
i
is a finite set of variables, where each vari-
able V ∈ V
i
has an associated finite domain D
V
. A
partial state is a function s on a subset V
i
(s) of V
i
,
so that s(V) ∈ D
V
for all V ∈ V
i
(s); s is a state if
V
i
(s) = V
i
. I
i
is the initial state and the goal G
i
is a
partial state. The set of variables is partitioned into the
set of public variables V
pub
, common to all factors,
and the set of private variables V
priv
i
, known only to
the agent i. V
pub
and V
priv
i
are pairwise disjoint, i.e.,
V
pub
∩V
priv
i
=
/
0 for every i ∈ A and V
priv
i
∩V
priv
j
=
/
0
for every i, j ∈ A such that i 6= j.
O
i
is a set of operators. Each operator o ∈ O
i
is
a tuple o = hpre
o
, eff
o
i, where pre
o
and eff
o
are both
partial states; pre
o
is called a precondition, and eff
o
is
called an effect. An operator o is applicable in a state
s if s(V ) = pre
o
(V) for every V ∈ V
i
. In that case, the
result of applying o in s, denoted as s[o], is another
state such that s[o](V ) = eff
o
(V) if V ∈ V
i
(eff
o
) and
s[o](V ) = s(V ) otherwise.
A sequence of operators π = ho
1
, ..., o
n
i is appli-
cable in a state s
0
if there are states s
1
, ..., s
n
such that
o
i
is applicable in s
i−1
and s
i
= s
i−1
[o
i
] for 1 ≤ i ≤ n.
The resulting state of this application is s
0
[π] = s
n
. A
set of local reachable states R
i
is a set of states s ∈ R
i
such that there exists a sequence of operators π such
that I
i
[π] = s. A local plan is a sequence of operators
π such that I
i
[π](V ) = G
i
(V) for every V ∈ V
i
(G
i
).
Let V =
S
i∈A
V
i
, a global partial state is a func-
tion g on a subset V(g) of V such that g(V ) ∈ D
V
for all V ∈ V(g); g is a global state if V(g) = V.
The valuation of the initial states over all public vari-
ables is the same, i.e., for every i, j ∈ A it holds that
I
i
(V) = I
j
(V) for every V ∈ V
pub
, and similarly for
the goals. The global initial state I is a global state
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
308

such that for every i ∈ A and every V ∈ V
i
it holds that
I(V ) = I
i
(V), and similarly for the global goal G it
holds that V (G) =
S
i∈A
V(G
i
) and G(V ) = G
i
(V) for
every i ∈ A and every V ∈ V
i
(G
i
). A global sequence
of operators π = ho
1
, ..., o
n
i is a sequence of opera-
tors from
S
i∈A
O
i
applicable in global states. A set
of global reachable states R is a set of states g ∈ R
such that there exists a global sequence of operators
π such that I[π] = g. A global plan is a global se-
quence of operators π such that I[π](V ) = G(V ) for
every V ∈ V(G).
A solution to a factored MA-FDR (or just MA-
FDR from now on) is a global multi-agent plan con-
sisting of operators from different factors. The so-
lution is searched for locally by individual agents in
their respective factors (Torreno et al., 2017).
4 GROUNDING
Grounding of the lifted MA-PDDL representation
is a process of instantiation of predicates and ac-
tions by replacing all occurrences of parameters by
the world objects. For example, in the problem of
the truck agent (in Fig. 2), the predicate (at ?obj
?loc) can be grounded using objects pkg and A
to the fact (at pkg A), and the action (load ?v
?p ?l) can be grounded using objects truck, pkg,
and A to the grounded action (load truck pkg A).
Since the grounding replaces all occurrences of the
parameters by the corresponding objects, grounding
of an action requires also grounding of the pred-
icates listed in its preconditions and effects. So
the grounded action (load truck pkg A) requires
grounded facts (in-city truck A), (at pkg A),
and (in pkg truck).
The grounding usually requires dealing with log-
ical formulas (containing, e.g., conjunctions, quanti-
fiers, or implications) that appear in the preconditions
and effects of actions, and in the goal specification.
The formulas need to be transformed into form that
the particular planner “understands”, e.g., they need
to be flattened into simple conjunctions of facts. How-
ever, the multi-agent grounding algorithm we propose
uses a (single-agent or local) grounding algorithm as
a black box that is called repeatedly. So, we are not
interested in the particular way actions are grounded
and, as we describe in the next section, the translation
of the grounded actions into the MA-FDR operators is
also independent of our algorithm. The only require-
ment on the black box is that it is somehow based on
the reachability of facts from the initial state. More
precisely, the black box is a procedure that has two
inputs and one output. The inputs are a MA-PDDL
specification and a set of reachable facts. The output
is a set of facts that are reachable from the input facts
through grounding of lifted actions and application of
those actions on the reachable facts.
Although a correct grounding requires only that
the grounded problem contains, at minimum, the
grounded actions that appear in the solution, deter-
mining the minimum set of the grounded actions
is as hard as planning itself. Therefore, the usual
way to generate the grounding is to use a delete-
free relaxation, i.e., delete effects are disregarded
and only add effects are considered. The ground-
ing starts with the initial state, which is always a
set of grounded facts, and proceeds with finding ac-
tions that can be grounded so that the preconditions
contain only already grounded facts, i.e., grounding
of the action does not require grounding of any ad-
ditional predicate. These actions are grounded and
their add effects are grounded into new facts. This
procedure is repeated until a fixpoint where no new
facts can be added. For example, this algorithm
with several improvements is used by (Edelkamp and
Helmert, 1999). The grounding algorithm proposed
by (Helmert, 2009) constructs Datalog program from
the lifted representation and the program generates
reachable facts and grounded actions. Both of these
algorithms can be used as a black box for our algo-
rithm, because they can be repeatedly called with a
different set of reachable facts. Both use the delete-
free relaxation, so we can always replace the input
initial state with the set of reachable facts and re-run
the grounding procedure.
Algorithm 1 shows the pseudo-code of the multi-
agent grounding algorithm which we propose. Each
agent runs the listed algorithm locally on its respec-
tive MA-PDDL factor. The highlighted function on
the line 3, Ground, is the black box function that
takes a MA-PDDL factor as its input and a set of the
facts that are currently recognized as reachable and
returns a new set of grounded operators and a new set
grounded facts.
The algorithm starts with initialization of output
sets (line 1) and then proceeds with the loop that runs
until no agent can ground any new actions or facts.
The loop starts with calling the black box function for
grounding of new actions O and facts F (line 3). Then
the public facts P are selected from F (line 4), and the
new public facts are sent to all other agents (line 5). In
the next step (line 6), the agent receives public facts
R sent from any other agent (or from more agents at
once if the public facts are available). Lastly (line 7
and 8), the grounded actions and all the grounded
facts, including the ones that were received from other
agents, are collected into output sets.
Concise Finite-Domain Representations for Factored MA-PDDL Planning Tasks
309

Algorithm 1: MA-PDDL problem grounding.
Input: MA-PDDL problem P
i
Output: Set of grounded actions G
O
, set of
grounded facts G
F
1 G
O
←
/
0; G
F
←
/
0;
2 until fixpoint do
3 O, F ← Ground(P
i
, G
F
); // black-box
4 P ← SelectPublicFacts(F);
5 SendToAll(P);
6 R ← ReceiveFromAny();
7 G
O
← G
O
∪ O;
8 G
F
← G
F
∪ F ∪ R;
9 end
The loop runs until a fixpoint is reached globally
by all agents, i.e., until no agents can ground any more
actions or facts. The implementation determining the
fixpoint is application dependent. It can be deter-
mined in a centralized way or by a distributed algo-
rithm such as the snapshot algorithm (Mattern, 1987).
If the black box function provides all the public
facts necessary, the proposed algorithm guarantees a
correct grounding of all factors, because the agents
communicate all public facts to each other, which
is everything the agents can know from each other.
Both aforementioned algorithms for the grounding
(Edelkamp and Helmert, 1999; Helmert, 2009) ful-
fill this requirement and both can be used as the black
box function in our algorithm.
5 INFERENCE OF MUTEX
GROUPS AND CONSTRUCTION
OF VARIABLES
A mutex group M is a set of facts of which maxi-
mally one can be part of any global reachable state
s ∈ R, i.e., it is an invariant with respect to all global
reachable states stating that either zero or one fact
from M can be part of any global reachable state.
Mutex groups are especially useful for the construc-
tion of variables from a grounded (MA-)PDDL task.
Since no two facts from a mutex group can be part of
the same state, it is always safe to create one variable
from each mutex group, so that each fact corresponds
to one value of the variable. Sometimes, an additional
value ⊥ must be added to the variable to cover the sit-
uation when none of the facts from the mutex group
is a part of the state. It is usually desirable to con-
struct the set of variables as concise as possible so
every fact is represented only by one value. For ex-
ample, if we have two mutex groups { f
1
, f
2
, f
3
} and
{ f
2
, f
3
, f
4
}, we create two variables V
1
and V
2
with the
values D
V
1
= { f
1
, f
2
, f
3
, ⊥} and D
V
2
= { f
4
, ⊥}. This
way, the variable V
1
can be stored using only two bits
and the variable V
2
using only one bit.
Moreover, the most concise representation can be
created if we could somehow infer all the maximum
sized mutex groups the grounded planning task con-
tain. However, it is as hard as planning itself to infer
a complete set of mutex groups. So in practice, the
inference algorithms opt to some sort of approxima-
tion, i.e., a sound but incomplete algorithm is usu-
ally used. Similarly to the grounding phase, we build
upon a black box function that is able to produce a set
of mutex groups that are local to each particular fac-
tor. Basically any algorithm for the inference of mu-
tex groups can be used (Edelkamp and Helmert, 1999;
Helmert, 2009). Before we start with the description
of the distributed algorithms for the construction of
MA-FDR variables, let us first clarify two things.
First, the constructed variables must obey the def-
inition of MA-FDR laid out in Section 3, i.e.:
• The private facts of each factor must be separated
to the private variables and an agent cannot com-
municate any private fact to any other agent and
the same holds for the private parts of the inferred
mutex groups.
• The public variables must be created from the
public facts and the public variables must be the
same for each and every agent. In other words, the
agents must somehow agree on the way the public
variables are constructed.
Second, the algorithm we propose utilizes a sim-
ple property of mutex groups: Every subset of a mu-
tex group is also a mutex group. It is easy to see that
if at most one fact from a mutex group can be part of
any reachable state, then the same must hold for any
subset of that mutex group. This also means that a
single fact is always a mutex group and we will fur-
ther assume that the black box used for the inference
of the local mutex groups will always return mutex
groups covering all the known facts. E.g., if we have
facts f
1
, f
2
, f
3
and the black box algorithm used would
generate a mutex group { f
1
, f
2
}, then we assume that
it generates also the trivial mutex group { f
3
} so that
each fact belongs to at least one mutex group.
Algorithm 2 shows the pseudo code of the dis-
tributed algorithm for the inference of (global) mutex
groups; each agent runs this algorithm locally with its
MA-PDDL factor and its grounded facts and actions
obtained from Algorithm 1. The algorithm returns
private and public mutex groups that will be used to
construct private and public variables, respectively.
On the line 1, the initial set of mutex group candi-
dates is obtained using the black box function Mutex-
Groups, which returns the sets of facts that are mutex
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
310

Algorithm 2: Inference of mutex groups.
Input: MA-PDDL problem P
i
, set of
grounded operators G
O
, set of
grounded facts G
F
Output: Set of public mutex groups M
pub
,
set of private mutex groups M
priv
/* black box */
1 M ← MutexGroups(P
i
, G
O
, G
F
);
2 M
pub
, M
priv
← SplitCandidates(M );
3 SendToAll(M
pub
);
4 for each agent j 6= i do
5 M
j
← ReceiveFromAgent( j);
6 M
pub
← {M | M
i
∈ M
pub
, M
j
∈ M
j
, M =
M
i
∩ M
j
, M 6=
/
0};
7 end
8 function SplitCandidates(M )
9 M
pub
←
/
0; M
priv
←
/
0;
10 for each M ∈ M do
11 P ← SelectPublicFacts(M);
12 M
pub
← M
pub
∪ {P};
13 M
priv
← M
priv
∪ {M \ P};
14 end
15 return M
pub
, M
priv
;
16 end
groups with respect to that particular factor. Then, the
mutex group candidates are split between private and
public parts using the function SplitCandidates.
The set M
priv
contains the mutex groups that con-
tain private facts only. These mutex groups are final,
because they correspond to the private part of each re-
spective factor and this part is neither communicated
to other agent nor it can be influenced by any other
agent. The private variables are constructed directly
from these mutex groups.
The set M
pub
contains the mutex group candidates
consisting of public facts only. These candidates need
to be further refined to get global mutex groups from
which the public variables can be constructed. The
refinement of the candidates is described on the lines
3 to 7 and it is based on two simple rules. First, every
subset of a mutex group is a mutex group (as already
discussed). Second, a set of facts that is a local mutex
group in all factors is certainly a global mutex group.
In other words, given a set of facts M, if we can prove
that the mutex group property of M cannot be violated
in any individual factor, then M has the mutex group
property with respect to all global reachable states.
So, each agent sends to every other agent its lo-
cal copy of M
pub
and also receives M
pub
from every
other agent (lines 3 and 5). Then it computes inter-
sections of all possible combinations of mutex groups
Algorithm 3: Construction of MA-FDR variables.
Input: Set of public mutex groups M
pub
, set
of private mutex groups M
priv
, set of
grounded facts G
F
Output: Set of variables V
pub
, V
priv
1 V
pub
← ConstructVariables(M
pub
, G
F
);
2 V
priv
← ConstructVariables(M
priv
, G
F
);
3 function ConstructVariables(M , G
F
)
4 V ←
/
0/* output set of variables
*/
5 E ←
/
0/* set of encoded facts */
6 while E 6= G
F
do
7 M ← SelectMutexGroup(M );
8 Create a new variable V ;
9 D
V
← M ∪ {⊥};
10 V ← V ∪ {V };
11 E ← E ∪M;
12 M ← {X | Y ∈ M , X = Y \U, X 6=
/
0};
13 end
14 return V;
15 end
from all agents, e.g., if we have three factors 1, 2, 3
and three sets of mutex groups M
1
, M
2
, M
3
for each
agent, respectively, then we compute intersections
M
1
∩M
2
∩M
3
for every M
1
∈ M
1
, every M
2
∈ M
2
and
every M
3
∈ M
3
. That is, it uses a brute force to find
the subsets of mutex groups that are mutex groups
in all individual factors. The non-empty sets are the
global mutex groups from which it is safe to construct
MA-FDR public variables. Algorithm 2 computes the
intersections of combinations iteratively using mutex
groups from one agent after another. This way the
empty intersections are filtered out as early as possi-
ble, so it reduces computational burden, because not
all combinations must be enumerated.
Note that all agents compute intersections from
the same sets, so every agent computes the exactly
same set of mutex groups. This enables to compute
the exactly same set of public variables by each agent
without actually communicating with each other. So
the only data that need to be communicated between
agents in this phase are the public parts of the local
mutex group candidates.
Algorithm 3 shows the pseudo code for the algo-
rithm that constructs variables from the given sets of
private and public mutex groups. It is, again, assumed
that every fact is contained in at least one mutex
group. Both the private and the public variables are
created using the function ConstructVariables. The
main loop of the function runs as long as there are
some facts that are not encoded as a value in any vari-
able. In each cycle, a mutex group is selected (line 7)
Concise Finite-Domain Representations for Factored MA-PDDL Planning Tasks
311
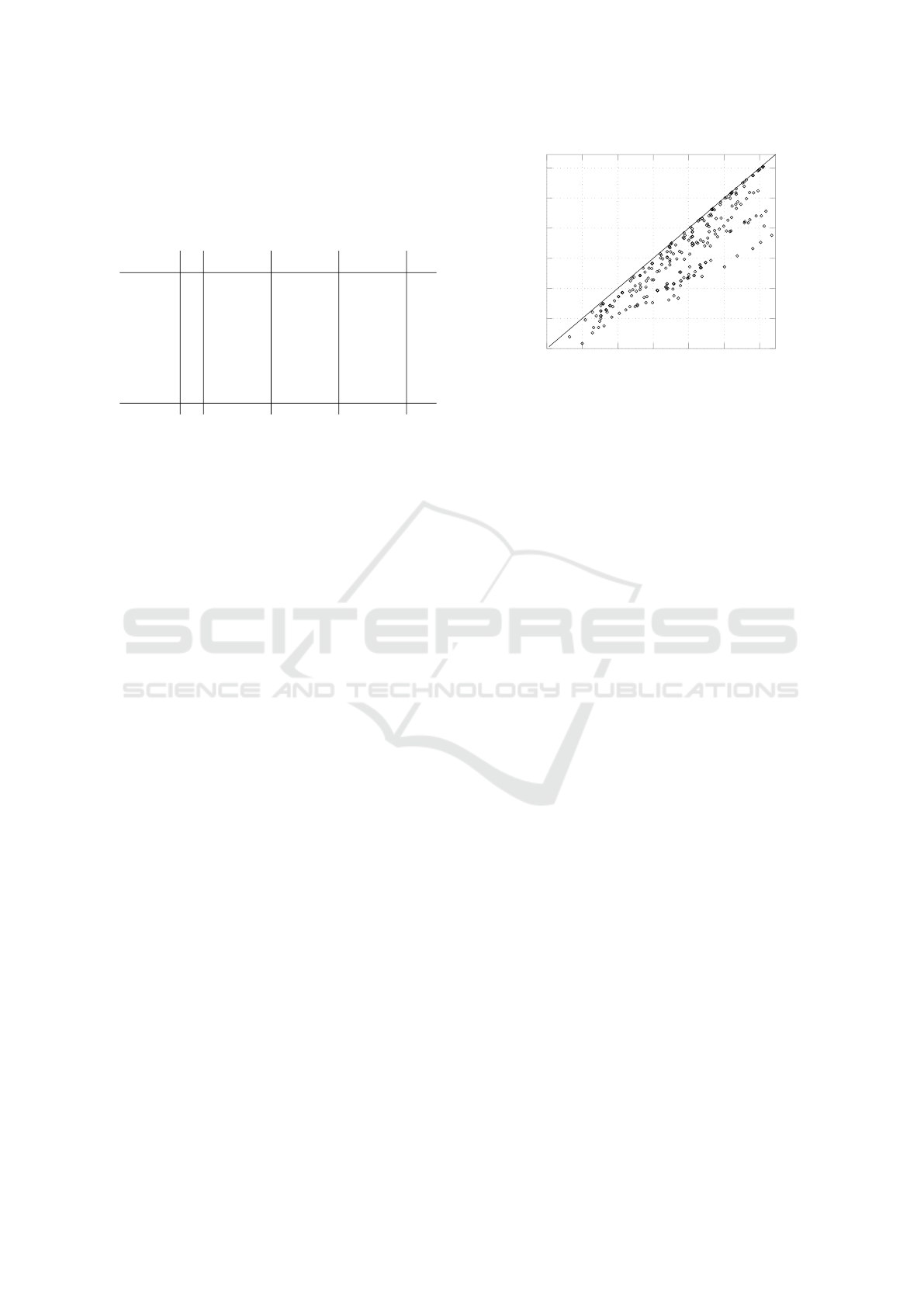
Table 1: The minimal number of bits required for storing
a global state given the constructed variables and the time
(in seconds) spent in the whole translation process; #ps: the
number of problems, ma: the proposed algorithm, bin: bi-
nary encoding of variables, priv: private variables, pub:
public variables.
domain #ps
priv pub priv + pub
time
ma bin ma bin ma bin
blocksworld 20 340 1 068 1 314 3 669 1 654 4 737 30.8
depot 20 514 1 238 5 559 5 559 6 073 6 797 86.4
driverlog 20 344 2 270 1 076 3 821 1 420 6 091 123.2
elevators 20 1 934 2 405 1 376 3 070 3 310 5 475 40.3
logistics 20 1 536 1 571 952 1 726 2 488 3 297 23.1
rovers 20 4 720 7 610 1 635 1 635 6 355 9 245 86.3
satellites 20 1 119 4 265 2 552 2 552 3 671 6 817 65.9
sokoban 20 321 2 328 1 483 2 902 1 804 5 230 21.5
taxi 20 0 0 865 1 085 865 1 085 26.8
wireless 20 1 619 1 815 11 440 11 724 13 059 13 539 126.6
woodworking 20 65 142 7 469 7 527 7 534 7 669 145.0
zenotravel 20 1 834 2 895 1 240 4 710 3 074 7 605 106.4
Σ 240 14 346 27 607 36 961 49 980 51 307 77 587 882.4
and a new variable is created from that mutex group
with added ⊥ value (lines 8 to 10). Since we do not
want to have one fact encoded twice as two values in
two different variables, the encoded facts are removed
from all the remaining mutex groups (line 12).
The selection of mutex groups on the line 7 deter-
mines the quality of the variable encoding. The opti-
mal encoding, in a number of bits required for encod-
ing a state, is NP-Complete, so the planners usually
implement a suboptimal but fast algorithm. These al-
gorithms can be implemented inside the function Se-
lectMutexGroup. The only restriction on the function
is that in the case of public mutex groups, the func-
tion returns the same mutex groups in the same or-
der for all agents. This is easy to implement, because
all agents have exactly the same set M
pub
, therefore
using some sort of a strict sorting is enough. This
ensures that each agent has exactly the same set of
public variables.
6 EXPERIMENTAL EVALUATION
The proposed algorithm was experimentally evalu-
ated on all domains from CoDMAP (Komenda et al.,
2016). The experiments ran on the Intel Core i5-
6200U (2.30 GHz) processor with 8 GB memory. The
algorithm was implemented into Fast Downward’s
(Helmert, 2006) preprocessor. Each agent ran in a
separate process and the agents communicated over
the TCP/IP protocol. We have measured the mini-
mal number of bits required for the encoding of a
global state given the constructed public and private
variables and the time spent in the whole translation
process. The number of bits required for the binary
encoding is used as a baseline for the comparison.
For example, having three variables V
1
, V
2
, and V
3
with the values D
V
1
= { f
1
, f
2
, ⊥}, D
V
2
= { f
3
, ⊥}, and
16
32
64
128
256
512
1024
16 32 64 128 256 512 1024
ma
bin
Figure 3: The minimal number of bits required for storing
the constructed variables as a scatter plot for all tested prob-
lems.
D
V
3
= { f
4
, f
5
, f
6
, ⊥}, respectively, the minimal num-
ber of bits required for the encoding of a global state is
2 + 1 + 2 = 5. Whereas in the binary encoding (used,
e.g., in Fast Forward planner (Hoffmann and Nebel,
2001)), each of the values f
1
, ..., f
6
is encoded in the
separate variable, therefore 6 bits are required (one bit
per fact).
Table 1 and Fig. 3 show the experimental results.
The average time spent in the translation process of
a single problem was a little more than 3.5 seconds.
Since the typical amount of time allocated for the
planners in planning competitions is 30 minutes (5
minutes for the agile track), the average time spent
in the translation can be considered negligible, leav-
ing most of the time for the solving of the problems.
This is counterintuitive, considering that the infer-
ence of the mutex groups requires the computation of
intersections between mutex groups from all agents,
which could generate an exponential number of mu-
tex groups. However, the experiments show that the
proposed iterative method of the computation signif-
icantly reduces the number of intersections that need
to be computed, at least in the tested domains.
The comparison of the minimal number of bits re-
quired for storing a global state shows that the encod-
ing of the private parts of the states is considerably
more concise with our algorithm than the simple bi-
nary encoding in all tested domains except for the taxi
domain, which does not contain any private facts. In
3 out of 12 domains (depot, rovers, satellites), our al-
gorithm produces binary encoding of the public vari-
ables. However, in the rest, our algorithm produced
more concise encoding than the baseline.
Considering both private and public parts of the
global states, the binary encoding requires, overall,
1.5 times more bits than the one produced by our al-
gorithm. In the domains depot, wireless, and wood-
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
312

working, the encoding resulting from our algorithm
is very close to the baseline binary encoding. How-
ever, in the rest of the domains, our algorithm proved
to generate a substantially more concise encoding.
7 CONCLUSIONS
We have proposed a novel general scheme for the
translation of multi-agent planning tasks from MA-
PDDL to MA-FDR using the grounding and the in-
ference of mutex groups. The grounding process iter-
atively runs a centralized grounding algorithm, which
generates grounded facts and actions from the agent’s
MA-PDDL factor. All public facts are send to all
other agents, which add them into their own sets of
grounded facts. In the next iteration, all that grounded
facts are used to ground more facts and actions, and
this process continues until a fixpoint is reached. The
construction of the MA-FDR variables is based on
the inference of mutex groups. Each agent locally
uses a centralized algorithm for the inference of mu-
tex groups to find the candidate mutex groups. The
mutex groups are split between the public and the
private parts and, similarly to the grounding process,
the public parts are communicated to all other agents.
Then they are processed so that the global public mu-
tex groups are generated. The private mutex groups
are kept local, i.e., they are not communicated with
other agents while preserving privacy of the agents’
factors. The translation scheme was implemented
with the state-of-the-art grounding and mutex group
inference algorithms (Helmert, 2006) and used on the
CoDMAP benchmark set to show a reduction of the
multi-agent finite domain representation memory re-
quirements in the comparison with the binary repre-
sentation of the planning task. The finite domain rep-
resentations show around 33% space reduction to the
binary representation.
In future work, we plan to improve the com-
putational efficiency of the translation process with
tailored grounding and mutex group inference algo-
rithms. Another interesting direction is to use the pro-
posed scheme in other distributed multi-agent plan-
ners and experimentally compare its effect on the
complete planning process efficiency.
ACKNOWLEDGEMENTS
This research was supported by the Czech Sci-
ence Foundation (grant no. 15-20433Y) and by
the Grant Agency of the CTU in Prague (grant no.
SGS14/202/OHK3/3T/13).
REFERENCES
B
¨
ackstr
¨
om, C. and Nebel, B. (1995). Complexity results for
SAS+ planning. Computational Intelligence, 11:625–
656.
Brafman, R. I. and Domshlak, C. (2008). From one to
many: Planning for loosely coupled multi-agent sys-
tems. In Proceedings of the Eighteenth International
Conference on Automated Planning and Scheduling,
(ICAPS), pages 28–35.
Bylander, T. (1994). The computational complexity of
propositional STRIPS planning. Artif. Intell., 69(1-
2):165–204.
Edelkamp, S. and Helmert, M. (1999). Exhibiting knowl-
edge in planning problems to minimize state encoding
length. In Recent Advances in AI Planning, 5th Euro-
pean Conference on Planning (ECP), pages 135–147.
Fi
ˇ
ser, D.,
ˇ
Stolba, M., and Komenda, A. (2015). MAPlan.
In Proceedings of the Competition of Distributed and
Multi-Agent Planners (CoDMAP), pages 8–10.
Helmert, M. (2006). The Fast Downward planning system.
J. Artif. Intell. Res. (JAIR), 26:191–246.
Helmert, M. (2009). Concise finite-domain representations
for PDDL planning tasks. Artif. Intell., 173(5–6):503–
535.
Hoffmann, J. and Nebel, B. (2001). The FF planning sys-
tem: Fast plan generation through heuristic search. J.
Artif. Intell. Res., 14:253–302.
Komenda, A., Stolba, M., and Kovacs, D. L. (2016). The in-
ternational competition of distributed and multiagent
planners (CoDMAP). AI Magazine, 37(3):109–115.
Kovacs, D. L. (2012). A multi-agent extension of PDDL3.1.
In Proceedings of the 3rd Workshop on the Inter-
national Planning Competition (WIPC), 22nd In-
ternational Conference on Automated Planning and
Scheduling (ICAPS), pages 19–27.
Mattern, F. (1987). Algorithms for distributed termination
detection. Distributed Computing, 2(3):161–175.
McDermott, D. V. (2000). The 1998 AI planning systems
competition. AI Magazine, 21(2):35–55.
Torre
˜
no, A., Onaindia, E., and Sapena, O. (2014). FMAP:
distributed cooperative multi-agent planning. Appl.
Intell., 41(2):606–626.
Torreno, A., Onaindia, E., Stolba, M., and Komenda, A.
(2017). Cooperative multi-agent planning: A survey
(in print). ACM Computing Surveys.
Tozicka, J., Jakubuv, J., Komenda, A., and Pechoucek,
M. (2016). Privacy-concerned multiagent planning.
Knowl. Inf. Syst., 48(3):581–618.
Concise Finite-Domain Representations for Factored MA-PDDL Planning Tasks
313
