
Simultaneous Object Classification and Viewpoint Estimation using
Deep Multi-task Convolutional Neural Network
Ahmed J. Afifi
1
, Olaf Hellwich
1
and Toufique A. Soomro
2
1
Computer Vision & Remote Sensing, Technische Universität Berlin, Berlin, Germany
2
School of Computing and Mathematics, Charles Sturt University, Bathurst, Australia
Keywords: Convolutional Neural Networks (CNNs), Multi-task, Object Classification, Viewpoint Estimation, Synthetic
Images.
Abstract: Convolutional Neural Networks (CNNs) have shown an impressive performance in many computer vision
tasks. Most of the CNN architectures were proposed to solve a single task. This paper proposes a CNN
model to tackle the problem of object classification and viewpoint estimation simultaneously, where these
problems are opposite in terms of feature representation. While object classification task aims to learn
viewpoint invariant features, viewpoint estimation task requires features that capture the variations of the
viewpoint for the same object. This study addresses this problem by introducing a multi-task CNN
architecture that performs object classification and viewpoint estimation simultaneously. The first part of
the CNN is shared between the two tasks, and the second part is two subnetworks to solve each task
separately. Synthetic images are used to increase the training dataset to train the proposed model. To
evaluate our model, PASCAL3D+ dataset is used to test our proposed model, as it is a challenging dataset
for object detection and viewpoint estimation. According to the results, the proposed model performs as a
multi-task model, where we can exploit the shared layers to feed their features for different tasks. Moreover,
3D models can be used to render images in different conditions to solve the lack of training data and to
enhance the training of the CNNs.
1 INTRODUCTION
Object classification and viewpoint estimation have
become popular research topics in computer vision
field because of their wide applications. Addressing
these two tasks at the same time is beneficial to
describe an object under general object recognition
task. Object classification is the problem of
assigning the correct label to the object in an image.
This problem concerns many object classes with
different visual instances. For better object
understanding, viewpoint estimation is an important
step in many applications, such as image retrieval
and model matching. Viewpoint estimation is the
problem of estimating the view angle with respect to
the camera. Also, in scene understanding, it is
important to estimate the viewpoint of an object
accurately to discover the overall 3D structure of the
object and the scene (Penedones et al., 2012) (Su et
al., 2015).
Human vision system can recognize different
objects of the same class with different viewpoint
easily, and it can differentiate between various
classes by matching these objects with the correct
classes. However, some computerized vision
systems can recognize specific objects, but they
have troubles in learning and understanding more
object categories. Even among some classes, these
systems find difficulties in recognizing and
classifying some objects because of the changes in
lighting conditions, occurrence in different pose, or
occurrence in cluttered or occluded environment (Su
et al., 2010).
Object classification and viewpoint estimation
problems have been studied as separate problems
intensively. However, finding a standalone system
that is capable of performing both tasks
simultaneously is difficult because these tasks have
opposite directions in terms of feature
representation. For object classification, the system
has to learn invariant features with respect to object
viewpoint. So it can easily classify the same object
that appears in different poses. With regard to
estimate the viewpoint of an object, the system has
Afifi, A., Hellwich, O. and Soomro, T.
Simultaneous Object Classification and Viewpoint Estimation using Deep Multi-task Convolutional Neural Network.
DOI: 10.5220/0006544001770184
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
177-184
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
177

to learn a representation that preserves the geometric
and the visual information in order to distinguish
between different viewpoints of the same object
(Zhang et al., 2013).
With the rise of deep learning architectures,
many computer vision tasks have been solved using
Convolutional Neural Networks (CNNs) such as
object recognition and detection (Girshick et al.,
2014), segmentation (Shelhamer et al., 2017), and
object depth estimation (Afifi and Hellwich, 2016).
These problems have been considered either
classification problems or regression problems.
These architectures have been proposed to solve a
single task, and they have shown impressive results.
They were pre-trained to perform a specific task and
then fine-tuned to perform another task, which is
known as transfer learning (Yosinski et al., 2014).
Extending these architectures to solve multiple tasks
at the same time can be done, but careful design is
needed. This means that some layers will be shared
for both tasks and some layers will be separated.
The lack of data to train a CNN for a specific
task is an irrevocable problem. CNNs need huge
number of images to be trained. Fine-tuning a pre-
trained CNN can solve the problem of the lack of
data if the new task is similar or related to the
original task that the CNN has been trained to solve.
With the availability of large-scale online 3D models
repositories, huge number of images with known
viewpoints can be rendered, which can be used for
training. In order to make the synthesized images as
real ones, the synthesized images can be overlaid
with real images as a background image. This step
helps the CNN to train on synthesized images,
similar to the real images, and to overcome the lack
of data issue (Su et al., 2015).
We summarize the contribution of this paper as
follows. First, we propose a multi-task CNN
architecture that solves jointly object classification
and viewpoint estimation tasks. We use a complete
synthesized dataset rendered from 3D objects with
rich annotations to increase the training dataset and
to train the CNN for both tasks. Also, we build a
class-dependent subnetwork for viewpoint
estimation task that takes care of estimating the
viewpoint depends on the object class. Our proposed
model showed impressive results in both tasks, and
they are comparable to the state-of-the-art results.
2 RELATED WORK
Object classification and viewpoint estimation have
been studied in recent years, especially with the
evolution of deep learning methods in solving
computer vision tasks.
2.1 Object Classification
In (Krizhevsky et al., 2012), the authors proposed
the first CNN architecture to solve the problem of
object classification. They submitted their results to
the ImageNet Large-Scale Visual Recognition
Challenge (ILSVRC) (Deng et al., 2009). They
achieved the top results in the competition. The
model was deep consisting of successive
convolutional layers, with activation functions and
max-pooling layers, and fully connected layers.
Object detection is an important task in computer
vision, and can easily be achieved by surrounding
the object by a box then classify it. Early work has
been achieved by a selective search algorithm (Van
de Sande et al., 2011) that generates many region
proposals from the input image to recognise them.
With respect to the transfer learning concept which
introduced in CNN training (Yosinski et al., 2014),
many approaches prefer to fine-tune a pre-trained
CNN with less training data than ImageNet dataset.
In (Girshick et al., 2014), the authors applied the
selective research algorithm to generate around 2000
category-independent region proposals and warp
them to fine-tune a CNN pre-trained on ImageNet to
classify each generated proposal either an object or a
background. In (Oquab et al., 2014), the authors
fine-tuned a pre-trained CNN trained on ImageNet
dataset to compute mid-level image representation
from images different from ImageNet dataset and
perform object classification on Pascal VOC dataset.
Also, (He et al., 2015) obtained state-of-the-art
results in object detection and classification by
training new fully connected layers on the top of
convolutional layers of a network trained previously
on ImageNet dataset. They introduce the Spatial
Pyramid Pooling layer (SPP) that is flexible enough
to handle different scales, sizes, and aspect ratios of
the image.
2.2 Viewpoint Estimation
Object orientation is an important geometric feature
of the objects in images that can be used for 3D
reconstruction. While some previous works dealt
with the problem of object viewpoint estimation as a
regression problem, we consider this problem as a
classification task using CNN. Previous methods
focused on estimating object viewpoint of a single
object class. They considered simple models of
objects without considering the large intra-class
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
178

variations. Also, they didn’t generalize their
methods to handle different object categories
because the dataset annotation is insufficient.
Recently, PASCAL3D+ dataset (Xiang et al.,
2014) has been introduced as a challenging dataset
for object detection and pose estimation. It augments
12 rigid objects with 3D annotations. Most related
works use this dataset to evaluate their models on
object detection and viewpoint estimation. The
output is considered to be correct if the object
detection part is correct (the bounding box overlap is
larger than 50%) and the viewpoint estimation part
is correct. R-CNN (Girshick et al., 2014) and Fast R-
CNN (Girshick, 2015) are mostly used as ready
detectors to detect the objects first and then estimate
the viewpoint. In (Tulsiani and Malik, 2015), the
authors consider the viewpoint estimation as a
classification problem and train a CNN to predict the
viewpoint. To evaluate their model, they use R-CNN
to detect the objects and the detected regions are
used to estimate the viewpoint. Also, (Poirson et al.,
2016) solve the problem of detection and pose
estimation in a single fast shot. They combine the
detection and the pose estimation at the same level
by extending the fast SSD detector (Liu et al., 2016)
to estimate object pose at the same time.
To overcome the scarcity of training data to train
the CNN for solving the problem of viewpoint
estimation, (Su et al., 2015) propose to use synthetic
images in training. They render images from 3D
online model repositories and mix them with real
images for training. We adopt this method to train
our model for both object classification and
viewpoint estimation.
In sum, object classification and viewpoint
estimation tasks have been studied and the proposed
methods have attained good results. However, the
two tasks are considered separately and separated
models are created for each task. Conversely, we
consider the two tasks by proposing a new multi-
task CNN architecture that performs object
classification and viewpoint estimation
simultaneously. We also train our model using a
synthesized image dataset and test it using a real
image dataset.
3 DEEP MULTI-TASK CNN
ARCHITECTURE
In this section, we describe our proposed multi-task
CNN architecture to solve object classification task
and viewpoint estimation task simultaneously. As
mentioned before, these two tasks have opposite
feature representation requirements. On one hand,
the extracted features should be viewpoint invariant
to classify the object correctly. On the other hand,
viewpoint features should preserve the geometric
and the visual features to distinguish between
different viewpoints of the same object.
3.1 CNN Architecture
We adopt the well-known CNN architecture
introduced by (Krizhevsky et al., 2012) and extend it
to solve our problem. This architecture consists of
five consecutive convolutional layers followed by
three fully connected layers, and it was trained to
classify 1K object classes.
So as to build a multi-task CNN model capable
of performing two tasks at the same time, we have to
decide whether the layers should be shared or
separated. Also, we have to decide where to branch
the network into two subnetworks. To solve this
issue, we propose a multi-task architecture with
shared and separated layers to perform as a multi-
task model as shown in Figure 1. This architecture
contains five convolutional layers that are shared
between both tasks. After the fifth convolutional
block, the model branches into two subnetworks,
one for each task. Each branch consists of three fully
connected layers.
The loss function L that is used to train the
proposed model has a classification term and a
viewpoint term. Formally, it is defined as:
𝐿
(
𝑊
)
= 𝜆
𝑐
. 𝑙𝑜𝑠𝑠
𝑐
(
𝑥, 𝑙
𝑐
)
+ 𝜆
𝑣𝑝
. 𝑙𝑜𝑠𝑠
𝑣𝑝
(
𝑥, 𝑙
𝑣𝑝
)
(1)
where loss
c
and loss
vp
are a softmax function of the
object classification task and the viewpoint
estimation task, respectively. x is the input image,
and l
c
and l
vp
are the class label and the viewpoint
label, respectively. λ
c
and λ
vp
are parameters to
balance the training process between the two tasks.
W is the CNN weights to be learned and optimized.
We apply max-pooling after the first, second, and
fifth convolutional layers. Max-pooling layers are
used to reduce the computation time and to control
the overfitting.
In (Yosinski et al., 2014), the authors
demonstrate that early layers in CNNs extract
generic features, while the last ones are original-
dataset-specific layers. Features from early layers
can be utilized as general features for different tasks.
The last layers extract specific features that help
solving a specific task. In our proposed model, the
convolutional blocks extract the generic features and
Simultaneous Object Classification and Viewpoint Estimation using Deep Multi-task Convolutional Neural Network
179
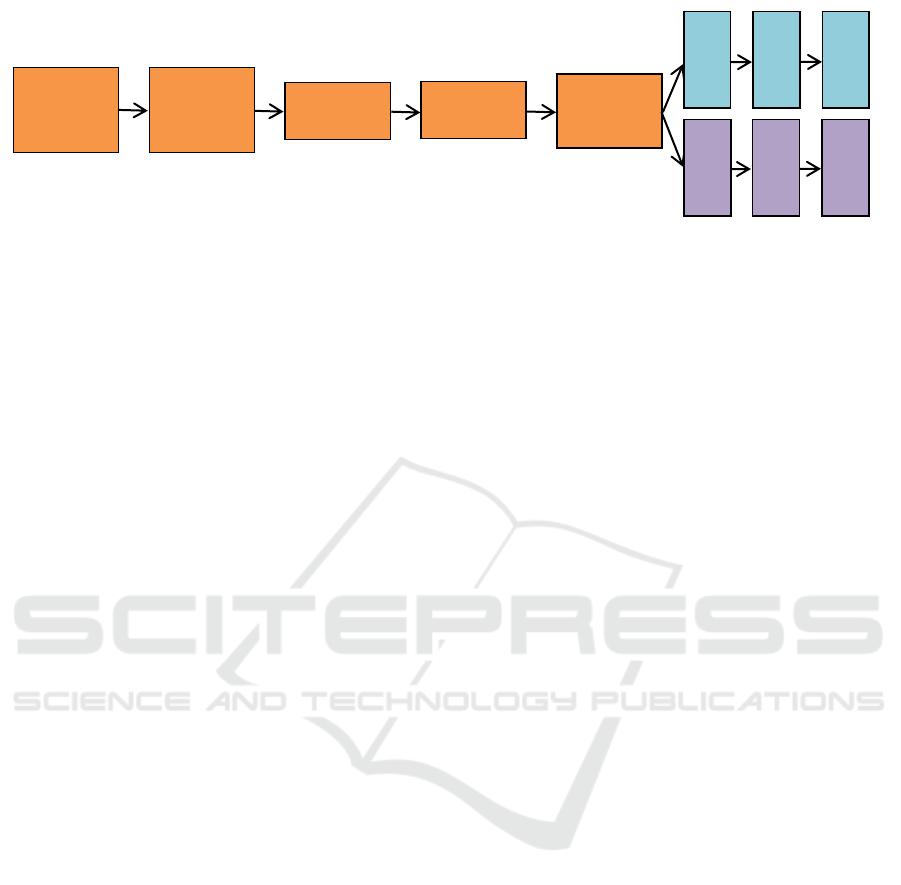
Figure 1: The CNN Architecture. ReLU is the activation function we use. Max-pooling is used in the first, second, and fifth
convolutional blocks. Fully connected viewpoint output layer is an object category dependent layer. Fully Connected layers
(FC) are followed by a dropout layer with rate 0.5.
the fully connected layers are task-specific layers.
So, the network branches after the fifth
convolutional block. The new subnetworks contain
rich and specific features that represent the objects
for a specific task as shown in Figure 1.
Concerning the viewpoint subnetwork, the first
two fully connected layers are used for all classes.
The last fully connected layer is a class-dependent
layer. That is each class has its own fully connected
layer to estimate the viewpoint. We use a separated
fully connected layer for each class because
viewpoint estimation depends on the geometric
properties of the classes, and there is a huge
geometric variation between the classes. So,
applying a model trained on a specific class will not
perform well on another class. And, creating a
separated subnetwork for each class and train it
independently is a naïve solution.
3.2 Implementation Details
We use MatConvNet (Vedaldi and Lenc, 2015), a
MATLAB toolbox implementing CNNs for
computer vision application, to implement and
evaluate our proposed model. The weights of the
shared layers are initialized using the corresponding
weights in VGG-m model (Chatfield et al., 2014),
which was pre-trained on the ILSVRC data for
image classification. The weights of the
classification subnetwork layers are initialized from
the same network, while the viewpoint subnetwork
weights were initialized randomly. We fine-tune the
subnetworks using back-propagation. Stochastic
gradient descent (SGD) method is used to optimize
our network with the following settings: the
momentum is set to 0.9, and the weight decay is set
to 10
-5
. The learning rate is initialized to 10
-3
and is
decreased by 10 when the validation error doesn’t
change.
With reference to the object classification and
viewpoint estimation, we train our model on 11
object classes which are introduced in PASCAL3D+
dataset (Xiang et al., 2014). For the viewpoint
estimation task, it is known that the nature of the
viewpoint is continuous, and many research works
deal with this problem as a regression problem
(Schwarz et al., 2015). However, we consider the
task as a classification problem. More specifically,
we focus on estimating the azimuth angle and we
divide the viewpoint range into 36 classes (10 angles
in each class).
Regarding the training data, CNNs are always
hungry and need a massive amount of data for
training. With the availability of large-scale online
3D model repositories (Chang et al., 2015), we use
these 3D models to render object images with
different orientations. The rendering process helps to
introduce more images to train the CNN for object
classification and viewpoint estimation. We can
control the rendering process and generate a huge
number of images. Rendered images provide a
reasonable number of images for the CNN to be
trained well (Su et al., 2015). Also, we performed
data augmentation on the rendered images which
resulted in increasing the training data. We also
overlaid the rendered images with real images as
background to guide the network towards
convergence and to avoid wrong classification.
4 EXPERIMENTAL RESULTS
In this section, we will present the experimental
results for object classification and viewpoint
estimation, respectively. Before that, we will
introduce the test dataset which we will use.
PASCAL3D+ (Xiang et al., 2014) is a well-
known challenging dataset for object detection and
viewpoint estimation captured in the wild. It
contains 12 rigid categories of PASCAL VOC 2012
Conv_Block 1
7×7 conv_96
ReLU
Norm
3×3 max_pool
Conv_Block 2
5×5 conv_256
ReLU
Norm
3×3 max_pool
Conv_Block 3
3×3 conv_512
ReLU
Conv_Block 4
3×3 conv_512
ReLU
Conv_Block 5
3×3 conv_512
ReLU
3×3 max_pool
FC3-VP 396
FC3-class 11
FC2-VP 1024
FC1-class 4096
FC2-class 1024
FC1-VP 4096
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
180

(Everingham et al., 2010) with rich 3D annotations.
That is, each object is annotated with its viewpoint
(azimuth angle, elevation angle, and distance from
the camera) and bounding box values surrounding
the object in the image. Furthermore, more images
were added from ImageNet (Deng et al., 2009) for
each category with rich annotations, and we use
them to evaluate our model on object classification
task.
4.1 Object Classification Results
We test our model on ImageNet dataset for object
classification on the same object classes that are
introduced in PASCAL3D+ dataset (11 object
classes). Table 1 shows the performance of our
proposed model. We use the mean Average
Precision (mAP) as a metric to evaluate our model.
From Table 1, we can notice that our proposed
model can classify the objects accurately. This
model was trained on synthesized images and tested
on real images. The results show that we can use
synthesized images to train CNNs and enhance the
performance of the trained model. We got 93.1%
classification mean Average Precision when we
consider the maximum output value from the CNN.
We also conduct another experiment to evaluate
the performance of our model using PASCAL VOC
2012 val dataset on the same object classes
introduced in PASCAL3D+ dataset with rich
annotations. This dataset is a challenging dataset
because the images were captured in the wild, and
each image contains many objects of different
classes. We use the ground-truth bounding box to
extract the object from the input image and resize it
to fit the CNN model input size. Table 1 shows the
performance of our model on PASCAL VOC 2012
val dataset. We notice that the chair and the table
classes record low accuracy. The reason behind this
is that they appear mostly together in the same
image, and when we extract the object, it appears as
a cluttered or occluded object. We can conclude that
the proposed model performs well for object
classification.
To compare our proposed architecture
performance to other methods, we use PASCAL
VOC 2007 test dataset as most of the literature uses
this dataset. Our proposed model solves object
classification and viewpoint estimation problem
simultaneously. We compared our results to (Wu et
al., 2015), (Oquab et al., 2014), and (Razavian et al.,
2014). In (Wu et al., 2015), the authors proposed a
deep learning framework in weakly supervised
settings that can classify multiple objects in a single
image and perform image annotation. The authors in
(Oquab et al., 2014) proposed a method to exploit
the image representations learned by CNNs trained
on large-scale annotated dataset to other recognition
task. They used the layers trained on ImageNet
dataset to extract mid-level features from PASCAL
VOC dataset and trained new layers for object
classification problem. That is, they have applied the
transfer learning concept to exploit the pre-trained
layers to extract generic features and train new
layers on different dataset for the same task.
(Razavian et al., 2014) used the features extracted
from OverFeat network (Sermanet et al., 2013) as
generic features to solve many object recognition
tasks, such as object classification and scene
recognition. For each task, they selected a suitable
dataset according to the task. After that, a linear
SVM classifier is applied on the extracted features
from the network. We have to point out that the
previously mentioned works used the whole 20
object classes in PASCAL VOC 2007 test dataset to
test their proposed methods. However, we just train
and test our proposed model on the object classes
introduced in PASCAL3D+ dataset, which are 11
object classes. Also, the images we used in training
are synthetic images to overcome the problem of the
lack of data. Table 2 shows the comparison between
the results reported in the previous works and our
results. It is clear that our proposed method
outperforms the previous work in object
classification task.
4.2 Viewpoint Estimation Results
First, we present a comparison between two
different choices of CNN architecture with respect to
the output layer, either class-specific or general
outputs, and we show that the output layer should be
class dependent because of the geometric differences
between the object classes. Then, we compare our
proposed network results with some previous works
that address the same problem.
4.2.1 Comparison of Different Viewpoint
Estimation Networks
We compare two different choices of models for
viewpoint estimation with respect to the output
layer. The first model is the same proposed model
with respect to the viewpoint subnetwork as shown
in Figure 1, where the last fully connected layer is a
class specific layer. That is, for each class we train a
separate layer. We denote this model by
specific_model. The second model shares the last
Simultaneous Object Classification and Viewpoint Estimation using Deep Multi-task Convolutional Neural Network
181
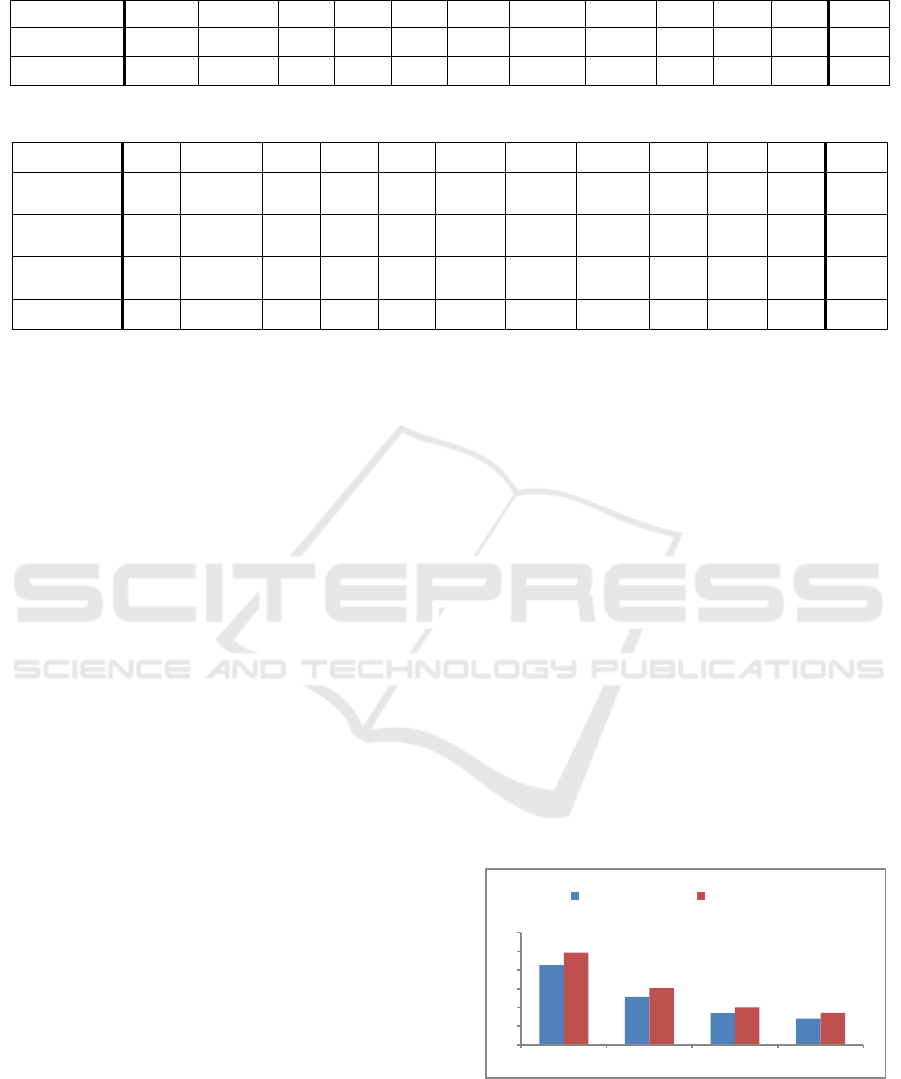
Table 1: Object Classification Performance on ImageNet dataset and PASCAL VOC 2012 val dataset.
Dataset
aero
bicycle
boat
bus
car
chair
d.table
mbike
sofa
train
tv
mAP
ImageNet
99.0
94.3
98.4
94.5
97.4
72.1
97.7
90.8
86.3
95.1
97.9
93.1
VOC 12 val
89.6
81.7
79.1
81.0
77.5
76.1
65.6
78.9
58.0
78.6
85.8
77.5
Table 2: Object Classification results and comparison with other methods on PASCAL VOC 2007 test dataset.
Method
aero
bicycle
boat
bus
car
chair
d.table
mbike
sofa
train
tv
mAP
Wu et al.,
2015
93.5
83.4
83.6
81.6
86.6
54.5
53.8
79.0
63.7
91.5
80.4
77.4
Oquab et
al., 2014
88.5
81.5
82.0
75.5
90.1
61.6
67.3
80.0
58.0
90.4
77.9
77.5
Razavian
et al., 2014
90.1
84.4
84.1
73.4
86.7
61.3
69.6
80.0
67.3
89.1
74.9
78.3
Ours
90.4
86.7
76.9
84.3
87.5
77.2
73.3
81.0
67.4
77.1
87.5
80.9
fully connected layer between all classes. So, it
doesn’t care about the object class when the model
estimates the object viewpoint. We denote this
model by general_model. We train both proposed
models on synthetic images and test them on
PASCAL VOC 2012 val dataset. We use the
ground-truth bounding box to extract the object from
the image during testing, and we use the Average
Precision (AP) as a metric to compare the
performance of the models. We perform the
experiment on 4 different viewpoint categorizations
as introduced in (Xiang et al., 2014). Figure 2 shows
the results of both models, and we can clearly notice
that the class specific layers at the end of the
subnetwork perform better and more accurate than
when using the same fully connected layer for all
classes. This is because the variety of the geometry
information between different classes, and even
between the objects in the same class.
4.2.2 Comparison to Previous Methods
We conduct an experiment to evaluate the
performance of our model on object viewpoint
estimation and compare it with other models. We
use PASCAL VOC 2012 val dataset as most of the
previous methods used it to evaluate their models.
As introduced in PASCAL3D+, Average
Viewpoint Precision (AVP) metric (Xiang et al.,
2014) is used to evaluate object detection and
viewpoint estimation. That is, the output is
considered to be correct if and only if the bounding
box overlap that detects the object is larger than 50%
and the viewpoint is correct. As our problem is to
solve only the viewpoint estimation task, we use R-
CNN (Girshick et al., 2014) detector to generate the
bounding box. Other methods use either their own
detectors or other proposed detectors like Fast R-
CNN (Girshick, 2014). Table 3 shows the detailed
comparison between our method and other previous
methods handling the same problem.
We compare our model with the following
models: DPM-VOC+VP (Pepik et al., 2012) which
uses a modified version of DPM to predict
viewpoint, Render for CNN (Su et al., 2015) which
uses R-CNN for object detection, and Viewpoints &
Keypoints (Tulsiani and Malik, 2015). The authors
in (Poirson et al., 2016) proposed a fast model that
detect the object using SSD detector and estimate its
pose, and they achieved comparable results with the
state-of-the-art. In (Massa et al., 2016), the authors
achieved the state-of-the-art results of viewpoint
estimation on PASCAL3D+. They use VGG16
(Simonyan and Zisserman, 2014) model for
viewpoint estimation and Fast R-CNN (Girshick,
2015) for detection. Our model achieved a
comparable accuracy to the state-of-the-art models,
and we can conclude that we got a model that can
classify the object and estimate the viewpoint at the
same time.
Figure 2: Comparison of Different Viewpoint
Discretization between different Viewpoint Estimation
Models.
42,6
25,7
16,9
14,1
49,3
30,3
20.0
17,1
0
10
20
30
40
50
60
VP-4 VP-8 VP-16 VP-24
general_model specific_model
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
182
Table 3: Viewpoint estimation results and comparisons with the state-of-the-art methods on PASCAL VOC 2012 val
dataset. The methods are referenced as follow: DPM-VOC+VP (Pepik et al., 2012), Render for CNN (Su et al., 2015), Vps
& Kps (Tulsiani and Malik, 2015), Fast SSD (Poirson et al., 2016), and Craft. CNN (Massa et al., 2016).
Methods
aero
bicycle
boat
bus
car
chair
d.table
mbike
sofa
train
tv
Avg.
Joint Object Detection and Viewpoint Estimation (4 View AVP)
DPM-VOC+VP
37.4
43.9
0.3
48.6
36.9
6.1
2.1
31.8
11.8
11.1
32.2
23.8
Render for CNN
54.0
50.5
15.1
57.1
41.8
15.7
18.6
50.8
28.4
46.1
58.2
39.7
Vps & Kps
63.1
59.4
23.0
69.8
55.2
25.1
24.3
61.1
43.8
59.4
55.4
49.1
Fast SSD
64.6
62.1
26.8
70.0
51.4
11.3
40.7
62.7
40.6
65.9
61.3
50.6
Ours
58.4
60.8
29.1
62.1
50.3
37.6
41.5
59.1
55.6
55.9
51.3
51.1
Craft. CNN
70.3
67.0
36.7
75.4
58.3
21.4
34.5
71.5
46.0
64.3
63.4
55.4
Joint Object Detection and Viewpoint Estimation (8 View AVP)
DPM-VOC+VP
28.6
40.3
0.2
38.0
36.6
9.4
2.6
32.0
11.0
9.8
28.6
21.5
Render for CNN
44.5
41.1
10.1
48.0
36.6
13.7
15.1
39.9
26.8
39.1
46.5
32.9
Vps & Kps
57.5
54.8
18.9
59.4
51.5
24.7
20.5
59.5
43.7
53.3
45.6
44.5
Fast SSD
58.7
56.4
19.9
62.4
45.2
10.6
34.7
58.6
38.8
61.2
49.7
45.1
Ours
49.6
55.9
22.2
60.8
44.7
32.2
31.2
55.4
46.1
53.1
50.3
45.6
Craft. CNN
66.0
62.5
31.1
68.7
55.7
19.2
31.9
64.0
44.7
61.8
58.0
51.3
Joint Object Detection and Viewpoint Estimation (16 View AVP)
DPM-VOC+VP
15.9
22.9
0.3
49.0
29.6
6.1
2.3
16.7
7.1
20.2
19.9
17.3
Render for CNN
27.5
25.8
6.5
45.5
29.7
8.5
12.0
31.4
17.7
29.7
31.4
24.2
Vps & Kps
46.6
42.0
12.7
64.6
42.7
20.8
18.5
38.8
33.5
42.5
32.9
36.0
Fast SSD
46.1
39.6
13.6
56.0
36.8
6.4
23.5
41.8
27.0
38.8
36.4
33.3
Ours
31.9
40.3
13.5
55.9
37.8
25.8
24.6
41.7
41.0
47.2
44.2
36.7
Craft. CNN
51.4
43.0
23.5
68.9
46.3
15.2
29.3
49.4
35.6
47.0
37.3
40.6
Joint Object Detection and Viewpoint Estimation (24 View AVP)
DPM-VOC+VP
9.7
16.7
2.2
42.1
24.6
4.2
2.1
10.5
4.1
20.7
12.9
13.6
Render for CNN
21.5
22.0
4.1
38.6
25.5
7.4
11.0
24.4
15.0
28.0
19.8
19.8
Vps & Kps
37.0
33.4
10.0
54.1
40.0
17.5
19.9
34.3
28.9
43.9
22.7
31.1
Fast SSD
43.2
29.4
9.2
54.7
35.7
5.5
23.0
30.3
27.6
44.1
34.3
28.8
Ours
26.4
30.7
11.2
53.9
34.1
23.2
23.3
33.3
37.3
45.0
40.2
32.6
Craft. CNN
43.2
39.4
16.8
61.0
44.2
13.5
29.4
37.5
33.5
46.6
32.5
36.1
5 CONCLUSIONS
In this paper, we tackled the problem of object
classification and viewpoint estimation
simultaneously. We presented a new multi-task
CNN architecture that has shared layers performing
as features extraction layers for both tasks and
separated subnetworks for each task. Owing to the
opposite nature of the two tasks, the branching is
necessary. Object classification task requires
viewpoint invariant features, while viewpoint
estimation task requires capturing the variations of
the viewpoint for different objects of different
classes. We also trained our network on synthesized
images and this helped us in solving the problem of
the lack of data problem. Our results showed that the
proposed model has high accuracy on both tasks and
is comparable to the state-of-the-art methods.
REFERENCES
Afifi, A. J. and Hellwich, O., 2016. Object Depth
Estimation from a Single Image Using Fully
Convolutional Neural Network. In Digital Image
Computing: Techniques and Applications (DICTA),
2016 International Conference on (pp. 1-7). IEEE.
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan, P.,
Huang, Q., Li, Z., Savarese, S., Savva, M., Song, S.,
Su, H. and Xiao, J., 2015. Shapenet: An information-
rich 3d model repository. arXiv preprint
arXiv:1512.03012.
Chatfield, K., Simonyan, K., Vedaldi, A. and Zisserman,
A., 2014. Return of the devil in the details: Delving
Simultaneous Object Classification and Viewpoint Estimation using Deep Multi-task Convolutional Neural Network
183

deep into convolutional nets. arXiv preprint
arXiv:1405.3531
Deng, J., Dong, W., Socher, R., Li, L.J., Li, K. and Fei-
Fei, L., 2009. Imagenet: A large-scale hierarchical
image database. In Computer Vision and Pattern
Recognition, 2009. CVPR 2009. IEEE Conference on
(pp. 248-255). IEEE.
Everingham, M., Van Gool, L., Williams, C.K., Winn, J.
and Zisserman, A., 2010. The pascal visual object
classes (voc) challenge. International journal of
computer vision, 88(2), pp.303-338.
Girshick, R., Donahue, J., Darrell, T. and Malik, J., 2014.
Rich feature hierarchies for accurate object detection
and semantic segmentation. In Proceedings of the
IEEE conference on computer vision and pattern
recognition (pp. 580-587).
Girshick, R., 2015. Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision (pp.
1440-1448).
He, K., Zhang, X., Ren, S. and Sun, J., 2015. Spatial
pyramid pooling in deep convolutional networks for
visual recognition. IEEE transactions on pattern
analysis and machine intelligence, 37(9), pp.1904-
1916.
Krizhevsky, A., Sutskever, I. and Hinton, G.E., 2012.
Imagenet classification with deep convolutional neural
networks. In Advances in neural information
processing systems (pp. 1097-1105).
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.Y. and Berg, A.C., 2016. Ssd: Single shot
multibox detector. In European conference on
computer vision (pp. 21-37). Springer, Cham.
Massa, F., Marlet, R. and Aubry, M., 2016. Crafting a
multi-task CNN for viewpoint estimation. In BMVC
(pp. 1-10).
Oquab, M., Bottou, L., Laptev, I. and Sivic, J., 2014.
Learning and transferring mid-level image
representations using convolutional neural networks.
In Proceedings of the IEEE conference on computer
vision and pattern recognition (pp. 1717-1724).
Penedones, H., Collobert, R., Fleuret, F. and Grangier, D.,
2012. Improving object classification using pose
information (No. EPFL-REPORT-192574). Idiap.
Pepik, B., Stark, M., Gehler, P. and Schiele, B., 2012,
June. Teaching 3d geometry to deformable part
models. In Computer Vision and Pattern Recognition
(CVPR), 2012 IEEE Conference on(pp. 3362-3369).
IEEE.
Poirson, P., Ammirato, P., Fu, C.Y., Liu, W., Kosecka, J.
and Berg, A.C., 2016. Fast single shot detection and
pose estimation. In 3D Vision (3DV), 2016 Fourth
International Conference on (pp. 676-684). IEEE.
Schwarz, M., Schulz, H. and Behnke, S., 2015. RGB-D
object recognition and pose estimation based on pre-
trained convolutional neural network features. In
Robotics and Automation (ICRA), 2015 IEEE
International Conference on (pp. 1329-1335). IEEE.
Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fergus,
R. and LeCun, Y., 2013. Overfeat: Integrated
recognition, localization and detection using
convolutional networks. arXiv preprint arXiv:
1312.6229.
Sharif Razavian, A., Azizpour, H., Sullivan, J. and
Carlsson, S., 2014. CNN features off-the-shelf: an
astounding baseline for recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition workshops (pp. 806-813).
Shelhamer, E., Long, J. and Darrell, T., 2017. Fully
convolutional networks for semantic segmentation.
IEEE transactions on pattern analysis and machine
intelligence, 39(4), pp.640-651.
Simonyan, K. and Zisserman, A., 2014. Very deep
convolutional networks for large-scale image
recognition. arXiv preprint arXiv:1409.1556.
Su, Y., Allan, M. and Jurie, F., 2010. Improving object
classification using semantic attributes. In BMVC (pp.
1-10).
Su, H., Qi, C.R., Li, Y. and Guibas, L.J., 2015. Render for
cnn: Viewpoint estimation in images using cnns
trained with rendered 3d model views. In Proceedings
of the IEEE International Conference on Computer
Vision (pp. 2686-2694).
Tulsiani, S. and Malik, J., 2015. Viewpoints and
keypoints. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition (pp. 1510-
1519).
Van de Sande, K.E., Uijlings, J.R., Gevers, T. and
Smeulders, A.W., 2011. Segmentation as selective
search for object recognition. In Computer Vision
(ICCV), 2011 IEEE International Conference on (pp.
1879-1886). IEEE.
Vedaldi, A. and Lenc, K., 2015. Matconvnet:
Convolutional neural networks for matlab. In
Proceedings of the 23rd ACM international
conference on Multimedia (pp. 689-692). ACM.
Wu, J., Yu, Y., Huang, C. and Yu, K., 2015. Deep
multiple instance learning for image classification and
auto-annotation. In Proceedings of the IEEE
Conference on Computer Vision and Pattern
Recognition (pp. 3460-3469).
Xiang, Y., Mottaghi, R. and Savarese, S., 2014. Beyond
pascal: A benchmark for 3d object detection in the
wild. In Applications of Computer Vision (WACV),
2014 IEEE Winter Conference on(pp. 75-82). IEEE.
Yosinski, J., Clune, J., Bengio, Y. and Lipson, H., 2014.
How transferable are features in deep neural
networks?. In Advances in neural information
processing systems (pp. 3320-3328).
Zhang, H., El-Gaaly, T., Elgammal, A.M. and Jiang, Z.,
2013, July. Joint Object and Pose Recognition Using
Homeomorphic Manifold Analysis. In AAAI(Vol. 2, p.
5).
Zhang, H., El-Gaaly, T., Elgammal, A. and Jiang, Z.,
2015. Factorization of view-object manifolds for joint
object recognition and pose estimation. Computer
Vision and Image Understanding, 139, pp.89-103.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
184
