
A Sensor Which Can Be Varied in Humidity Sensitivity
A First Experience Paving the Way to New Chemical Sensors?
Giovanni Saggio
1
, Arnaldo D’Amico
1
, Vito Errico
1
, Giovanni Costantini
1
,
Giorgio Pennazza
2
, Alessandro Zompanti
2
and Marco Santonico
2
1
Dept. of Engineering, University of Rome Tor Vergata, Italy
2
Dept. of Engineering, Campus Bio-Medico University of Rome, Italy
Keywords: Resistive Flex Sensor, Humidity Sensor, Humidity Sensitivity, Sensitivity.
Abstract: During last decades, a number of different sensors have been developing for different analytics to detect. A
key aspect of those sensors is that each of them results with a fixed particular sensitivity. Consequently, at
occurrence, it is necessary to use a plurality of sensors to arrange measures with different levels of sensitivity.
This work intends to investigate the possibility to obtain different sensitivity, in particular with respect to
humidity, from one sensor only. To this aim we investigated the resistive flex sensor, which has been already
used for other applications but, as far as we know, never investigated for its potential properties as a chemical
sensor. Results demonstrated how the resistive flex sensor behaves with different sensitivity values and
different sensitivity curves for different bend conditions.
1 INTRODUCTION
Humidity refers to the amount of water vapour in the
air. It is so important that can affect meaningfully a
number of different aspects of manufacturing
(processes in industries), of building structural
integrities, even of human comfort. Therefore, its
measure can be, somewhat, strategic.
Humidity sensors which have been developed
during last decades mainly rely on thermal, acoustic,
capacitive or resistive effects (Awang, 2014). The
latter, in particular, is commonly based on a comb-
shaped thick metal film, with underneath a polymeric
film, which “furnishes” a different number of ion
current carriers according to the surrounding
humidity.
The choice of the humidity sensor depends on the
specific application, and has to take into account
some parameters related to boundary conditions, such
as size, packaging, cost, interchangeability, and some
others related to the measurement effectiveness, such
as accuracy, repeatability, long-term stability,
recovering time, sensitivity (Chen and Lu, 2005).
Our work regards the investigation of a humidity
sensor which, with respect to the usually adopted
sensors based on the resistive effect, differs in type
and offers a changeable sensitivity.
In particular, we investigated the response to
humidity of a resistive flex sensor (RFS), with the
possibility to change its sensitivity, within a certain
range, as desired.
As far as we know, the RFS has never been
adopted for humidity measurement purposes and, in
addition, it is the first proposal of a humidity sensor
able to change its sensitivity of the measure.
2 MATERIALS AND METHODS
2.1 Resistive Flex Sensors
A resistive flex sensor (Figure 1) converts its
mechanical bending into a proportional electrical
resistance variation. This is due to “isles” of carbon
particles (engineered on top of a plastic support and
drowned in a binder) which increase their distance
with RFS bending, so that the resistance
proportionally increases too. This effect is almost
reversible, so that the RFS furnish its base resistance
when returned to flat conditions (Saggio et al., 2016;
Saggio et al., 2009).
Up to now, RFSs have been used in a number of
different applications.
Saggio, G., D’Amico, A., Err ico, V., Costantini, G., Pennazza, G., Zompanti, A. and Santonico, M.
A Sensor Which Can Be Varied in Humidity Sensitivity - A First Experience Paving the Way to New Chemical Sensors?.
DOI: 10.5220/0006546001130118
In Proceedings of the 11th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2018) - Volume 4: BIOSIGNALS, pages 113-118
ISBN: 978-989-758-279-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
113

(a)
(b)
Figure 1: (a) Top and (b) lateral view of a resistive flex
sensor, manufactured by Flexpoint Inc.
The most investigated application consists in
laying RFSs on parts of human skins, so to measure
flexions/warpings of joints/segments of the human
body. The focus has been for the hand, in measuring
fingers (Gentner and Classen, 2009; Saggio, 2012;
Saggio, 2014), palm (Rossel et al., 2009; Dalley et al.,
2012) and wrist (Howcroft et al., 2011; Kushsairy et
al., 2015; Yu et al., 2016). Anyway, RFSs have been
used for other body parts too, such as neck (Al-
Rahayfeh and Faezipour, 2014), shoulder (Kushsairy
et al., 2015), elbow (Kushsairy et al., 2015), torso
(Saggio et al., 2016), belly (for foetal movements of
pregnant woman) (Borges et al., 2009), ankle
(Mazhar and Bari, 2015; Resendiz et al., 2016), lower
limb (with a deep vein thrombosis cuff) (Qidwai et
al., 2016), and foot (Patil et al., 2016).
Other fields of RFS application involves human-
computer interface (Berlia and Santosh, 2014),
human-machine interface (Asgar et al., 2013),
actuators (Elgeneidy et al., 2016), robots (Mutka et
al., 2014), automotive (Persson, 2002) and, even,
plants (Shanmugam et al., 2016).
Mechanical and biocompatibility characteristics
of RFSs have been already investigated (Saggio,
2012; Saggio et al., 2014), and the interested reader
can find a comprehensive review in (Saggio et al.,
2016).
Our hypothesis concerns the possibility to adopt
RFS as a chemical sensor too, an idea that, as far as
we know, was never investigated. This hypothesis
relies on the fact that mechanical changes with
bending induce physical changes of the “isle” of
carbon particles distribution (Saggio, 2012) that can
induce different chemical interaction with the
surroundings (Saggio et al., 2014), so that the RFS
with different bending can behave differently with
respect to external analytics.
The RFS we adopted is manufactured by
Flexpoint Inc. (Draper, UT, USA) In particular, we
selected the 0.005x0.3x3 inch (thickness, width,
length) type. Three different versions are available,
with overlamination (polyamide or polyester) as a
protective layer on-top of the sensible part but, for our
purposes, we adopted the bare-one, that is, with no
protective layer.
2.2 Electronic Circuitry
We configured the RFS as a variable resistor in the
feedback path of an OpAmp (TL082 by Texas
Instruments), as schematized in Figure 2, so to obtain
a sensitivity changed by the RFS alone, without any
influences due to the electronics (the latter behaving
with a constant sensitivity).
Figure 2: Reading electronics for the resistive flex sensor’s
(R2) outputs. The RFS behaves in feedback of an OpAmp.
Supply was sourced by a constant voltage batteries
(E=1.2V; Vcc=+/-8.4V). We provided a series
limiting current resistor R1 (10KΩ) too.
2.3 Measuring Setup
In order to investigate differences in sensitivity of the
RFS under different bending curvature, we realized
three different mechanical arrangements for the RFS,
fixing it on a planar, 35mm and 20mm in diameter
structures, respectively (Figure 3 shows the case of
20mm in diameter arrangement for the RFS), so to
investigate more and more bending conditions.
(a) (b)
Figure 3: (a) Lateral and (b) side view of the RFS placed on
a 20mm diameter support.
The measuring set-up was realized as shown in Figure
4. The humidity was generated by means of two-
channel mass flow controllers (MFCs) (SLA5850S
by Brooks Instruments), specifically calibrated for
nitrogen, obtaining a 0%-100% of humidity range.
One MFC fluxed different concentration of nitrogen,
the other channel contributed to form the humidity by
-
+
E
R1
+Vcc
-Vcc
Vout
R2
BIOSIGNALS 2018 - 11th International Conference on Bio-inspired Systems and Signal Processing
114
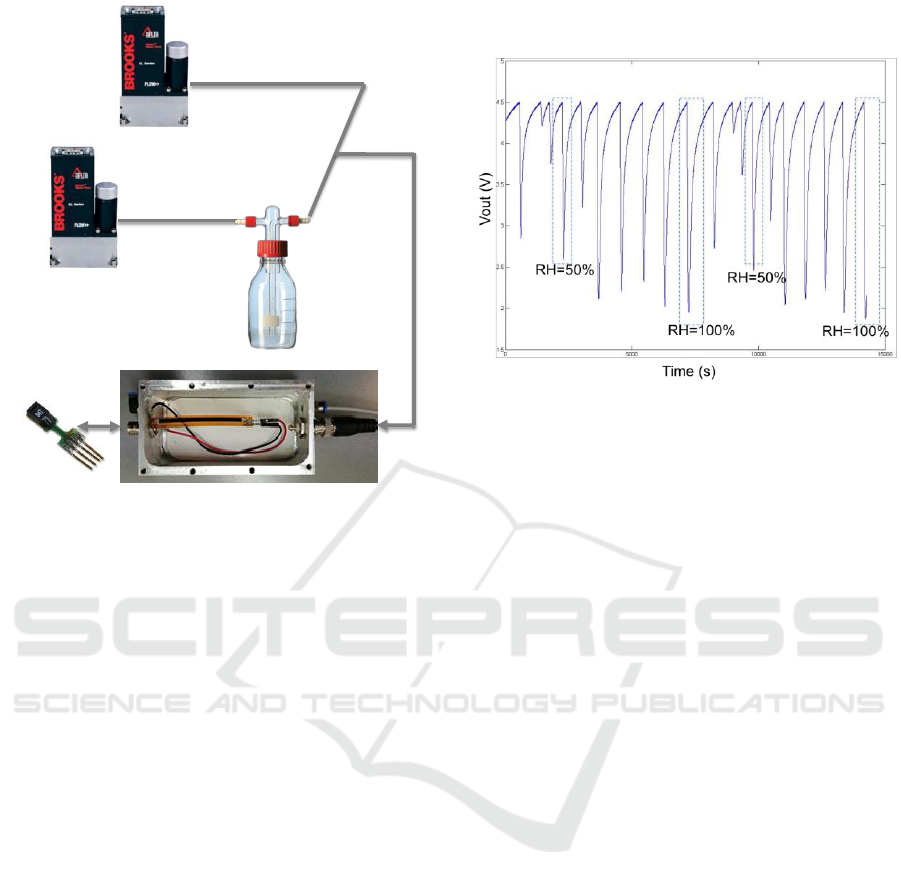
Figure 4: Set-up to investigate the different sensitivity of
the RFS for three different bending conditions.
bubbling water.
The RFS was placed inside of a climatic chamber,
time by time in a different bending condition as
detailed before, at a constant temperature of 25°C.
Inside the chamber the temperature and humidity was
monitored using a commercial temperature-humidity
sensor (SHT75 by Sensirion), with operating range
0RH%100 and -40°T123.8°, for relative
humidity and temperature, respectively.
3 RESULTS AND COMMENTS
Figure 5 illustrates the sensor’s output, as a dynamic
voltage responses in the case of flat configuration,
when different RH% values are flown into the sensor
cell.
With this example of result, we can worth
remarking three important evidences (obtained in all
the other occurrences):
▪ measurements have been randomly performed;
▪ sensor reproducibility is satisfactory, as shown
by highlighting couples of measurements for
the same values (50% and 100% of RH);
▪ the proportion between 100% and 50%
responses does not account for linearity.
Figure 5: Sequence of dynamic responses in the time
(seconds) domain, registered for the output voltage of the
sensor system (flex resistance in flat configuration +
electronic interface) when different RH% values are flown
into the sensor cell.
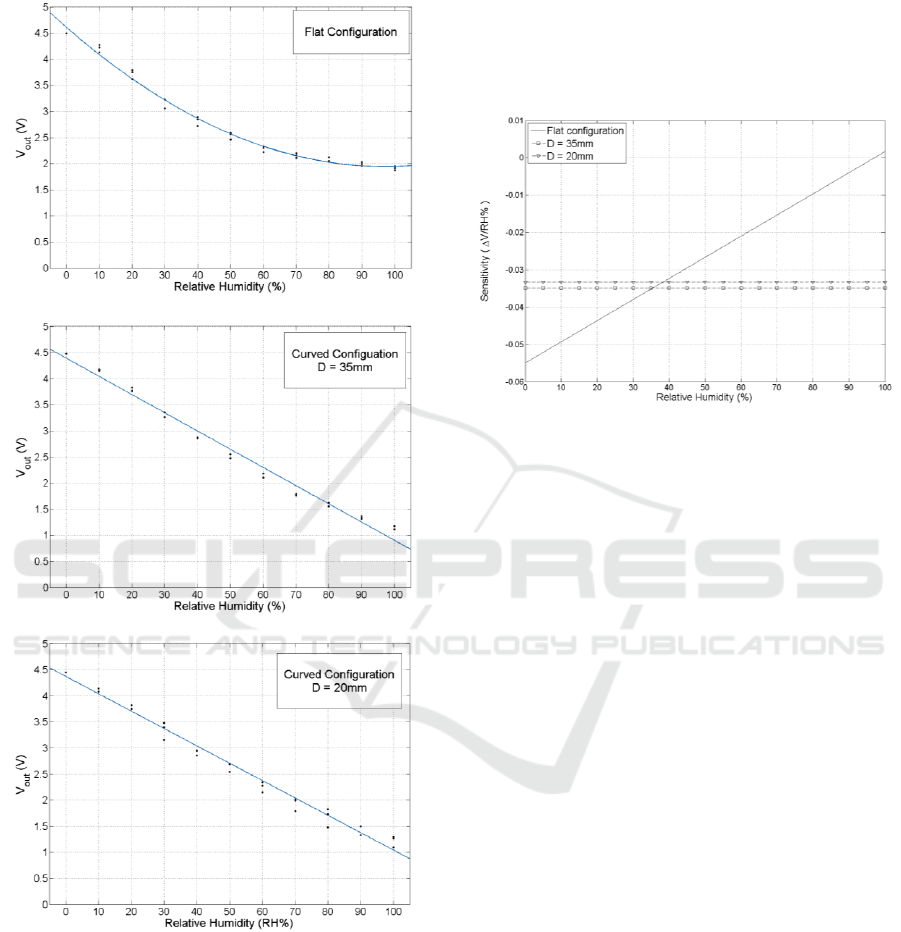
Figure 6 summarizes all obtained results, as three
outputs of the OpAmp voltage versus the relative
percentage humidity, Vout vs. RH%, one output for
each of the three mechanical configurations imposed
to the RFS: flat condition or bending conditions
around a 35mm and a 20mm diameter support,
respectively.
The three outputs can be summed by three V
out
vs.
RH% fitting curves as:
▪ flat setting:
V(RH%)
FS
= p1
FS
RH2 + p2
FS
RH + p3
FS
(with
p1
FS
= 0.00028; p2
FS
= -0.055 ; p3
FS
= 4.60,
Figure 5a);
▪ 35mm setting:
V(RH)
35S
= p1
35S
RH + p2
35S
(with p1
35S
= -0.035; p2
35S
= 4.39, Figure 5b);
▪ 20mm setting:
V(RH%)
20S
= p1
20S
RH + p2
20S
(with p1
20S
= -0.033; p2
20S
= 4.72, Figure 5c).
As evidenced, we found a non-linear behaviour,
with a saturation trend for RH%>80%, when RFS was
in flat condition, and almost linear behaviours when
RFS was in both bending conditions. In fact, for
bending conditions we obtained R-square=0.985, for
35mm diameter of the support, and R-square=0.9855,
for the 20mm diameter of the support, respectively.
The sensitivity, expressed as dV/dRH%,
calculated on the fitting curve reported above, was
confirmed to be linked to the physic deformation of
Mass flow
controller 2
Mass flow
controller 1
N
2
RH(%)
H
2
O
N
2
Sensirion
SHT75
RFS in test chamber
A Sensor Which Can Be Varied in Humidity Sensitivity - A First Experience Paving the Way to New Chemical Sensors?
115
the RFS, since it increases in value with RFS’s
bending.
(a)
(b)
(c)
Figure 6: Vout vs. RH% for RFS in (a) flat, (b) 35mm
diameter-support (R2=0.9852), (c) 20mm diameter-support
bending condition (R2=0.9855).
According to the results, graphically summed in
Figure 7, we can argue that the flat configuration for
RFS furnishes higher selectivity, but for humidity
within 1%-40% RH% range only; differently, the
bending configurations offer a lower sensitivity but it
remains almost linear within the overall RH% range.
In particular, in flat condition the sensitivity can
be estimated by a linear approximation at low RH%
value (less than 10%) as -50mV/%, while in the two
bending conditions we obtained -35mV/% and -
33V/% for the 35mm and 20mm settings,
respectively, within the overall RH% range of
variation.
(d)
Figure 7: Overall sensitivity.
4 CONCLUSIONS
Each humidity sensor has its proper sensitivity, that
is, the slope of its output characteristic curve which
relates sensor’s output with respect to relative
humidity (RH). Different sensitivities are for different
sensors.
Differently, we investigated the possibility to
vary the sensitivity of a unique sensor with changing
its bending.
The idea was to investigate the characteristic of a
resistive flex sensor, which is made of a sensible
carbon-based material, engineered on-top of a plastic
substrate, which can be bent with no damage.
The resistive flex sensor was measured under
different grade of bending, in a climate chamber with
relative humidity which was fully-range varied (0%-
100%).
The results demonstrated how the resistive flex
sensor behaves with different sensitivity and different
output-value versus RH% curves, so that we can
select the optimal bending to obtain the most useful
sensitivity-behaviour, according to specific measure
we are interested in.
As far as we know, this work opens to the
possibility to realize a new type of chemical sensors
which, respect to the currently adopted ones, can offer
the added value to mechanically real-time and on-the-
use change its selectivity.
BIOSIGNALS 2018 - 11th International Conference on Bio-inspired Systems and Signal Processing
116

This approach could be of great interest for
applications needing low-power and reduced
dimension, such as bio-medical applications in
general and in particular wearable solutions. Also
food industry could benefit from this approach when
focused on solutions for smart-packaging oriented to
quality monitoring and shelf-life assessment.
Future works will investigate change of
sensitivity with respect other chemicals (rather than
humidity) and change in selectivity, with respect to
different chemicals, so to evidence the possibility to
paving the way to a new kind of sensor, of which we
can change the sensitivity and the selectivity
according to the time-by-time necessity.
REFERENCES
Al-Rahayfeh, A., Faezipour, M., 2014, August. Application
of head flexion detection for enhancing eye gaze
direction classification. In Engineering in Medicine and
Biology Society (EMBC), 2014 36th Annual
International Conference of the IEEE, pp. 966-969.
Asgar, M., Badra, M., Irshad, K., Aftab, S., 2013.
Automated innovative wheelchair. International
Journal of Information Technology Convergence and
Services, Vol. 3, Issue 6, pp. 1-8.
Awang, Z., 2014. Gas sensors: a review. Sensors &
Transducers, Vol. 168, Issue 4, pp. 61-75.
Berlia, R., Santosh, P., 2014, November. Mouse Brace: A
convenient computer mouse using accelerometer, flex
sensors and microcontroller. In Contemporary
Computing and Informatics (IC3I), 2014 International
Conference on, pp. 558-561.
Borges, L. M., Barroca, N., Velez, F. J., Lebres, A. S., 2009,
April. Smart-clothing wireless flex sensor belt network
for foetal health monitoring. In Pervasive Computing
Technologies for Healthcare, 2009. PervasiveHealth.
3rd International Conference on, pp. 1-4.
Chen, Z., Lu, C., 2005. Humidity sensors: a review of
materials and mechanisms. Sensor letters, Vol. 3, Issue
4, pp. 274-295.
Dalley, S. A., Varol, H. A., Goldfarb, M., 2012. A method
for the control of multigrasp myoelectric prosthetic
hands. IEEE Transactions on Neural Systems and
Rehabilitation Engineering, Vol. 20, Issue 1, pp. 58-67.
Elgeneidy, K., Lohse, N., Jackson, M., 2016. Data-driven
bending angle prediction of soft pneumatic actuators
with embedded flex sensors. IFAC-PapersOnLine, Vol.
49, Issue 21, pp. 513-520.
Gentner, R., Classen, J., 2009. Development and evaluation
of a low-cost sensor glove for assessment of human
finger movements in neurophysiological settings.
Journal of neuroscience methods, Vol. 178, Issue 1, pp.
138-147.
Howcroft, J., Fehlings, D., Zabjek, K., Fay, L., Liang, J.,
Biddiss, E., 2011. Wearable wrist activity monitor as an
indicator of functional hand use in children with
cerebral palsy. Developmental Medicine & Child
Neurology, Vol. 53, Issue 11, pp. 1024-1029.
Kushsairy, A. K., Malik, M. A. A., Zulkhairi, M. Y., Nasir,
H., Khan, S., 2015, November. Real time monitoring
system for upper arms rehabilitation exercise. In Smart
Instrumentation, Measurement and Applications
(ICSIMA), 2015 IEEE 3rd International Conference on,
pp. 1-5.
Mazhar, O., Bari, A. Z., 2015, May. Real-time gait phase
detection using wearable sensors. In Control
Conference (ASCC), 2015 10th Asian, pp. 1-4.
Mutka, A., Kočo, E., Kovačić, Z., 2014. Adaptive control
of quadruped locomotion through variable compliance
of revolute spiral feet. International Journal of
Advanced Robotic Systems, Vol. 11, Issue 10, pp. 1-15.
Patil, J., Nandur, D., Mellikeri, M., Naik, K., Kulkarni, P.,
2016, March. Integrated sensor system for gait analysis.
In Electrical, Electronics, and Optimization Techniques
(ICEEOT), International Conference on, pp. 2298-
2301.
Persson, L., 2002. Bältespåminnelse-system för baksäte:
inventering och utvärdering University West,
Department of Technology (Trollhättan: University
West Trollhättan)
Qidwai, U., Kamran, S., Al-Sulaiti, S., Ahmed, G., Hegazy,
A., 2016, March. Monitoring DVT cuffs for long-term
operation: A fuzzy approach. In Signal Processing &
Its Applications (CSPA), 2016 IEEE 12th International
Colloquium on, pp. 41-45.
Resendiz, A., Odicho, D., Gabrielian, V., Nahapetian, A.,
2016, June. Edemeter: Wearable and continuous fluid
retention monitoring. In Wearable and Implantable
Body Sensor Networks (BSN), 2016 IEEE 13th
International Conference on, pp. 153-158.
Rosell, J., Suarez, R., Rosales, C., García, J. A., Pérez, A.,
2009, May. Motion planning for high DOF
anthropomorphic hands. In Robotics and Automation,
2009. ICRA'09. IEEE International Conference on, pp.
4025-4030.
Saggio, G., 2012. Mechanical model of flex sensors used to
sense finger movements. Sensors and Actuators A:
Physical, Vol. 185, pp. 53-58.
Saggio, G., 2014. A novel array of flex sensors for a
goniometric glove. Sensors and Actuators A: Physical,
Vol. 205, pp. 119-125.
Saggio, G., Bianchi, L., Castelli, S., Santucci, M. B.,
Fraziano, M., Desideri, A., 2014. In vitro analysis of
pyrogenicity and cytotoxicity profiles of flex sensors to
be used to sense human joint postures. Sensors, Vol. 14,
Issue 7, pp. 11672-11681.
Saggio, G., Bocchetti, S., Pinto, C.A., Orengo, G., Giannini,
F., 2009. A novel application method for wearable bend
sensors. 2nd International Symposium on Applied
Sciences in Biomedical and Communication
Technologies, ISABEL, IEEE.
Saggio, G., Riillo, F., Sbernini, L., Quitadamo, L. R., 2015.
Resistive flex sensors: a survey. Smart Materials and
Structures, Vol. 25, Issue 1, pp. 1-30.
Shanmugam, M., Ramasamy, A., Paramasivam, S.,
Prabhakaran, P., 2016. Monitoring the Turmeric Finger
A Sensor Which Can Be Varied in Humidity Sensitivity - A First Experience Paving the Way to New Chemical Sensors?
117

Disease and Growth Characteristics Using Sensor
Based Embedded System—A Novel Method. Circuits
and Systems, Vol. 7, Issue 08, pp. 1280-1296..
Yu, L., Xiong, D., Guo, L., Wang, J., 2016. A remote
quantitative Fugl-Meyer assessment framework for
stroke patients based on wearable sensor networks.
Computer methods and programs in biomedicine, Vol.
128, pp. 100-110.
BIOSIGNALS 2018 - 11th International Conference on Bio-inspired Systems and Signal Processing
118
