
Multidimensional Representations for the
Gesture Phase Segmentation Problem
An Exploratory Study using Multilayer Perceptrons
Ricardo A. Feitosa, Jallysson M. Rocha, Clodoaldo A. M. Lima and Sarajane M. Peres
Escola de Artes, Ciˆencias e Humanidades, Universidade de S˜ao Paulo, 03828-000, S˜ao Paulo-SP, Brazil
Keywords:
Gesture Phase Segmentation, Multidimensional Representation, Multilayer Perceptron.
Abstract:
Gesture analysis systems have been attracting a good deal of attention because of the improvements they
have made to the interaction between humans, humans and machines, and humans and their environment.
In this interaction, natural gesticulation can be regarded as a part of the linguistic system underlying the
communication, and the whole information system that seeks to make use of this kind of interaction for
making decisions, should be able to “interpret” it. This can be carried out through strategies for gesture
phase segmentation. The establishment of an efficient data representation for gestures is a critical issue when
undertaking this task. The chosen representation, as well as the way it is combined with analytical techniques,
may or may not support the solution that is found. In this study, different forms of representation for gestures
are applied to a Multilayer Perceptron to create a suitable environment for detecting the more discriminative
representations. The results obtained in this study showed that spatial and temporal characteristics must be
combined to build discriminatory gesture representation, for the context of gesture phase segmentation.
1 INTRODUCTION
The analysis of gestures is a task that is often carried
out in contexts in which one intends to understand
the meaning of a gesture and, on the basis of this
understanding, make use of this meaning for some
kind of decision making. In communication or inter-
action between people, the relationship between ges-
tures and language is established in a natural way, ei-
ther through a natural gesture or by composing a sign
language. In contexts where the interaction between
humans must be mediated by an information system
or the interaction is established between humans and
machines or environments, gestures should be consid-
ered as elements that convey information. If viewed
as a system with a finite vocabulary, it is possible to
define algorithms that can be exploited for the recog-
nition of sign language, as in Ong and Ranganath,
2005. However, in the case of natural gesticulation,
there is no finite or well defined vocabulary that can
be analyzed. Gestures are uncertain and depend on
the local and cultural diversity of the context in which
they are made (Kim et al., 2007). In this scenario, the
works in the literature study the movements of differ-
ent parts of the body to analyze human behavior.
The context of gesture analysis studied in this
work is constrained by the natural gesturing that is
embeddedin the communication. Within this context,
the Theory of Gestures allows different types of anal-
ysis to be conducted. One of these analyses is the one
conducted by Kendon, 1980, McNeill, 1992 and Mc-
Neill, 2015, who propose that a gesture is structured
in phases. This means it allows an analysis to be un-
dertaken of how the gestures are structured within the
situation in which they are manifested.
The search for solutions for automated gesture
phase segmentation requires the choice of a compu-
tational representation for the data under analysis –
the gestures. This is a crucial choice and it must
consider the data analysis technique that will be em-
ployed. Moreover, the domain in which the gestures
are interpreted includes special features that must be
well represented so that the computational algorithms
are able to handle them properly. Within a linguistic
system, executing and interpreting a gesture can en-
tail different aspects, the most common of which are
as follows: (1) spatial aspects that incorporate infor-
mation about form, amplitudeor direction; (2) tempo-
ral aspects that include information about both speed
and acceleration, as well as frequency and periodic-
ity; (3) structural aspects that hold the structural in-
formation and establish a link between the gestures
Feitosa, R., Rocha, J., Lima, C. and Peres, S.
Multidimensional Representations for the Gesture Phase Segmentation Problem - An Exploratory Study using Multilayer Perceptrons.
DOI: 10.5220/0006556003470354
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 2, pages 347-354
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
347
and their constituent parts (Smith, 2011) (Dietterich,
2002), or between the gestures and the other elements
of the system. The scope of this work is delimited by
the study of computationalrepresentations that are ca-
pable of describing these aspects. Besides, since the
objective is only to analyze the representations, the
classical technique Multilayer Perceptrons were cho-
sen to perform the pattern recognition.
This paper is structured as follows: Section 2
presents the basic concepts related to the solution pro-
posed in this paper; Section 3 investigates the ex-
ploratory study under discussion when showing how
gestures can be represented from spatial and temporal
information; Section 4 describes the different features
of the gestures that can be exploited to create multi-
dimensional representations; Section 5 describes how
the experiments were designed and carried out, and
then analyzes the results obtained; finally, the Sec-
tion 6 summarizes the conclusions and makes recom-
mendations for further studies in the field.
2 THEORETICAL BACKGROUND
This section defines the concepts underlying the two
theories used in this study. The problem of gesture
phase segmentation arises from the area of Gesture
Studies, and is examined in Section 2.1. The potential
value and drawbacks of the different forms of repre-
sentation for the gesture phases are explored by solv-
ing the gesture phase segmentation problem through
the use of classifiers. In this study, such classifiers
are established by Multilayer Perceptrons, and their
theoretical framework is described in Section 2.2.
2.1 Gesture Phase Segmentation
The study of gestures examines the movements of
body parts in communication. The analysis con-
ducted in this study is based on studies carried out
by Kendon, 1980, McNeill, 1992 and McNeill, 2015.
The data employed by these researchers, as well as
that of others in this area, are based on videos of
people speaking and gesticulating, which are con-
verted into representations that facilitate an analysis
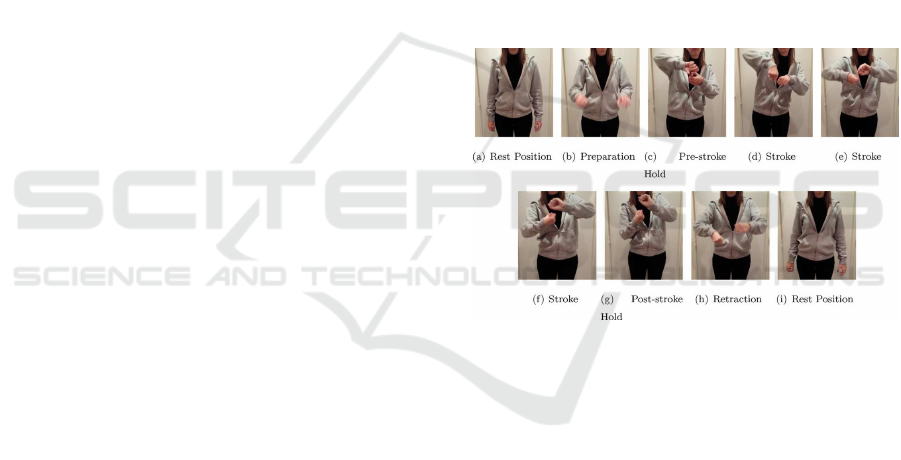
of gestures. According to these authors, the follow-
ing phases should be followed: preparation, this is
the phase when the limbs of the body, for example the
hands, move from a resting position (a period with
no gesticulation) to a stroking movement; pre-stroke
hold, the phase which represents a pause in the move-
ment of the hands between the preparation and the
stroking; stroke, is the gesture itself, or the period
of gesticulation that conveys some information that
has significant meaning during the execution; post-
stroke hold: the phase that represents a pause in the
movement of the hands between the stroke and the re-
traction; retraction, the phase during which the hand
adopts a return to the rest position; hold, a phase
added to this proposal to represent a period in which
there is no movement, although there is the presence
of information or meaning. It usually occurs between
the preparation and retraction phases.
The period between the moment the hand leaves
the resting position and returns to the resting position
is called a gesture unit (Kita et al., 1998). The stroke
is the only mandatory phase within the gesture unit.
Figure 1 illustrates such phases by arranging them in
a pattern alonga gesture unit that is expressedin a per-
sons natural gesture. Some frames from a video were
extracted to compose this illustration in which some-
one makes a gesture related to an action (a “twist”).
Each frame was taken from the period in the video
where there was a reference to a gesture phase.
Figure 1: Illustration of a gesture unit (Madeo et al., 2016).
There is still difficulty in identifying phases with
a similar configuration of limb features. There is
a difficulty in differentiating between a hold and a
rest, since both involve a reduced movement intensity.
It is also hard to determine the transitions between
the phases, or define the exact moment and frame in
which the gesture can be found. For example,it might
be from when the preparation phase enters the stroke
phase, or when the movement has left the post-stroke
hold phase and is about to enter the retraction phase.
Gesture analysis usually involves the following
activities: (1) identifying the movements made by the
users; (2) representing and recognizing movements
based on a specific analytical model; and (3) mak-
ing an evaluation of the results. After being extracted
from the data sources, the gestures are captured on
video and divided into frames. With regard to activ-
ities 2 and 3, a human specialist has to conduct an
analysis of each frame extracted from the database to
arrive at a verdict about which phase each frame be-
longs to, if the segmentation is carried out manually.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
348

This manual activity must be undertaken by a spe-
cialists. The person carrying out this activity has to
know the setting where the gestures were captured
and their execution sequence to determine which
phase of the gesture a given frame belongs to. It is
difficult for specialists in this area to reach a con-
sensus, since two experts can reach different conclu-
sions about which phase of the gesture a frame be-
longs to, even though they have the same information
(Kita et al., 1998). For these reasons, the manual seg-
mentation of the gesture phases can take a long time
to complete and have a low degree of efficiency.
The segmentation of gesture phases can also be
carried out automatically by means of different tech-
niques, and this is a means of overcoming or reduc-
ing the inherent problems of manual segmentation.
Automatic segmentation usually relies on the same
data sources as manual segmentation, but the decision
about which phase of the gesture each frame should
belong to is handled by heuristics, machine learning
algorithms, grammars etc. The application of these
techniques may require the collected gesture data to
be preprocessed and transformed into a specific data
representation so that they can be suitably analyzed.
Examples of techniques applied to automated ges-
ture segmentation include the HMM (Hidden Markov
Model), which is employed by Yin and Davis, 2014
for identifying the gesture phases. In Popa et al., 2008
also used HMMs to identify strokes from a represen-
tation of gestures based on information about the tra-
jectory of the hand. HMMs have often been used to
solve the problem of gesture phase segmentation, as
for example, the videos used in a lecture by Martell
and Kroll, 2007 to identify the phases of preparation,
stroke, hold, and retraction within a gesture unit. Ra-
makrishnanandNeff, 2013made use of heuristicsand
SVM (Support Vector Machines). Initially the heuris-
tics were used to identify the resting position and
points of interest in the video database. The SVMs
were then used to classify these points of interest in
the preparation, stroke, and retraction phases. Heuris-
tics were also used by Bryll et al., 2001 in their anal-
ysis of the organization of speech movements from
the gestures of the hands, with a view to identifying
the “holds”. It is also worth noting the work of Ge-
bre et al., 2012, who used logistic regression to detect
strokes of the hand from frames which contained in-
formation about the gestures collected.
Gesture phase segmentation is an approach used
for the analysis of gestures which can benefit profes-
sionals in a wide range of tasks. It can be stated that
linguistic specialists have been the main beneficiaries
of analyses based on the gesture phase segmentation.
However, severalother applications canbe delineated.
With regard to applications involving a finite vo-
cabulary, one can cite the work of Spano et al., 2012,
which uses sub-gestures to recognize more complex
gestures. Mention should also be made of Lee et al.,
2016 and Madeo et al., 2010, in which the configura-
tions and movements of the hands are explored. An-
other recent work involving the application of gesture
analysis is that of Freitas et al., 2014, in which gram-
matical facial expressions are identified.
Many of the challenges with regard to the analysis
of gestures concernnatural gestures because of the in-
numerable signs and nuances that characterize them.
This is so much so that works like that of Jacob and
Wachs, 2014 investigate whether gesture phases are
used to determine if a gesture was intentional or not.
An interesting example that concerns natural gesticu-
lation is the study carried out by Salem et al., 2012.
In his work, the phases of the gestures are used to an-
alyze human gestures and design a natural gesture for
robots, as well as to investigate the use of this kind of
gesture in the interaction between robots and humans.
2.2 Multilayer Perceptrons
Artificial Neural Networks (ANN) are based on a
number of concepts (Fausett, 1994): a) neurons are
the elements that process information, which are or-
ganized in an input layer (input neurons), represent-
ing the data that have to be processed, in one or more
hidden layers (optional), representing linear or non-
linear mappings of the data space, and an output layer
(output neurons), representing the ANN’s response;
b) the information is transmitted between the neurons
through connections; c) each connection is associated
with a weight that influences the transmitted informa-
tion; d) the output of each neuron is determined by an
activation function applied to its input.
The Multilayer Perceptron (MLP) is an ANN that
is used for non-linearly separable classification prob-
lems and is characterized by its supervised learning.
It consists of an input layer, one or more hidden layers
and an output layer, the latter two formed by the neu-
rons that will process the information in the ANN and
determine the resulting value (Haykin et al., 2009).
While using this network, the signal is propagated
from the input layer to one or more hidden layers and
then forwarded to the output layer, thus characteriz-
ing a feedforward network. In this type of network, it
is embedded a unitary and positive input, called bias,
for each neuron to increase the degree of freedom and
adaptation of the neural network during the learning
process (Haykin et al., 2009). The learning process
uses the supervised backpropagationtechnique, based
on error-correction rules. This technique consists of
Multidimensional Representations for the Gesture Phase Segmentation Problem - An Exploratory Study using Multilayer Perceptrons
349

two phases: propagation and backpropagation. In the
former, an input data vector is shown to the input layer
and its effect propagates through the network, layer
by layer, and produces a set of outputs. Following
this, the backpropagation phase adjusts the values of
the synaptic weights on the basis of an error calcu-
lated as the difference between the obtained response
and the desired response. This adjustment is made
from the output layer to the input layer. This learn-
ing technique causes the network response to move
toward the expected response (Haykin et al., 2009).
The MLP network usually uses a nonlinear acti-
vation function in its neurons. This nonlinearity is
smooth and differentiable at any point; it is usually
conferred by a sigmoid represented by the logistic
function y
j
=
1
1+exp(−v
j
)
, in which v
j
is the weighted
sum of the inputs plus the bias of the neuron j and y
j
is the output of the neuron. The network contains one
or more hidden layers of neurons that are involved in
learning complex tasks, and extracting the most sig-
nificant characteristics of the input data. It also has a
high degree of connectivity between its neurons. Any
alteration of this connectivity should involve making
a revision of the number of neurons or their weights.
The error is calculated from the difference between
the obtained response and the desired response, ac-
cording to e
j
(n) = d
j
(n) −y
j
(n), in which e
j
(n) is
the error in the neuron j at instant n. Thus, dur-
ing the backpropagation of the error, the new values
of the network weights can be defined by rules that
take account of this error, in the procedure defined
by the Delta Rule. In the Delta Rule, the value of
weight w at instant t + 1 is defined by w
ij
(t + 1) =
w
ij
(t) + ∆w
ij
(t), wherein ∆w
ij
(t) = w
ij
−a ×
∂EQM
∂w
ij
,
EQM(n) =
1
2
∑
ns
k=1
e
j
2
(n), a is the learning rate and
EQM represents the mean square error.
3 GESTURE REPRESENTATION
In automatic gesture segmentation, preprocessing of
the gestural data is usually necessary to form a rep-
resentation that is appropriate for the automated seg-
mentation technique that will be used.
In spatial information-based representations, fea-
tures are used such as the coordinates (x,y,z) of the
spatial position of the members that are monitored,
the angulation between the members, the hand con-
tours, among other aspects. The most used data
representations combine these features, as in Kyan
et al., 2015 where angulation in relation to the body
is used for the representation of the positioning of
the hands, wrists, elbows, shoulders, shoulder blades,
hips, pelvis, knees, feet, ankles, spine and head.
The colored images comprises other information
that has been used to construct representations. Liu
et al., 2014 used this characteristic to accomplish the
task of identifying the positioning of body parts. Dar-
das et al., 2014 and Xu and Lee, 2011 used the colored
images to carry out gesture recognition tasks and find
the contour of the hands. In Zhu et al., 2011 the infor-
mation about contours is used to select points around
the body under analysis. The outline of the limbs can
also be represented by information extracted from the
pixel matching, as investigated by Liang et al., 2014
and by Liu et al., 2015. Pixel matching is a term used
by Liu et al., 2015 to define a technique where im-
ages are analyzed through of searching for pixels with
similar characteristics (spatial coordinates and pixel
tone).
In temporal information-based representations,
the aspects are: a) the speed with which the moni-
tored members move, b) acceleration, c) the trajec-
tory and other information for which the order of the
frames are significant. Information about the accel-
eration and speed of the gesture is frequently used
(Bailador and Trivi˜no, 2010), (Khan et al., 2012) and
(Madeo et al., 2013).
4 MULTIDIMENSIONAL
REPRESENTATIONS
A number of studies rely on combinations of infor-
mation about gestures by making use of more than
one type of spatial information and combining it with
temporal information. Hachaj and Ogiela, 2014 use
the spatial coordinates and angles to represent the
hands, elbows, shoulders, thorax, hips, knees, feet,
spine and head for gesture recognition and tempo-
ral information. The temporal information is derived
from a timestamp attribute associated to each frame.
The timestamp is used to check the delay among dat-
apoints acquisition. The choice of characteristics that
belong to different categories is strategic in the task
of gesture phase segmentation.
When the gesture is analyzed as a video, the char-
acteristics are extracted from the set of frames that
make up the video. The initial data are obtained from
the static images that record each moment of the ges-
ture. As initial data, the coordinates and angulations
might represent a point of interest of the gesture, as
in Caramiaux et al., 2012 where the task of identi-
fying the gestures involves the position of the hands
and arms combined with the angulation and trajec-
tory of the lower and upper limbs of the body. The
task of obtaining information about the trajectory of
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
350

the hands and the position of parts of the body was
also explored by Abid et al., 2015, for the recognition
and classification of gestures in real time. Informa-
tion about the trajectory, along with the positioning
of objects that people are interacting with in the cap-
tured scenes, made up the representation of data used
by L¨ucking et al., 2013 and Rosani et al., 2014, that
also investigated the task of recognizing and classify-
ing gestures in real time.
When frames are analyzed in sequence, temporal
information can be extracted. For example, the se-
quence of different values of a given coordinate along
the frames can be analyzed as a time series, where
each scalar is a datapoint in the series. In a time se-
ries analysis, studies can be carried out by means of
the phase space concept, which also provides an anal-
ysis that assumes that sequences of scalar measure-
ments depend on previous states in the signal (Kantz
and Schreiber, 2004). The excursion of a spatial co-
ordinate along the frames can also be understood as a
continuous time-varying signal. Thus, it is possible to
consider filters being applied to smooth the signal.
5 EXPLORATORY STUDY
The aim of our study was to adopt an experimental
strategy for studing multidimensional representations
for gestures. These took account of the results of
the gesture phase segmentation obtained from the use
of these representations together with the MLP algo-
rithm. This section outlines the dataset used in the
experiments, describes the preprocessing procedures
and the extraction of the characteristics, and conducts
an analysis of the results generated by the MLP.
5.1 Dataset and Preprocessing
The experiments were carried out in a controlled en-
vironment to provide a more wide-ranging analysis of
the results obtained and get a greater dominance over
the preprocessing processes. Following these guide-
lines, one of the videos of the Gesture Phase Segmen-
tation Data Set
1
were used. Such a dataset consists
of seven videos showing the gesticulations of peo-
ple during a storytelling activity. It is a dataset with
frames labeled accordingto the phases of gesture: rest
position, preparation, stroke, hold and retraction. The
video chosen for analysis bythis work lasts for 60sec-
onds and generated a total of 1747 frames distributed
1
hhttps://archive.ics.uci.edu/ml/datasets/Gesture+
Phase+Segmentationi, (Lichman, 2013) and (Madeo et al.,
2013).
as follows: 698 in rest position; 163 in preparation;
656 in stroke; 39 in hold and 191 in retraction.
The video was recorded with the aid of MS Kinect
sensor, and relied on its ability to track the human
body in the captured images and provide coordinates
(x,y,z) of points of interest in the body. Six points
of interest were traced: the left hand, right hand, left
wrist, right wrist, head and spine. The temporal char-
acteristics represented by vector and scalar velocities,
together with vector and scalar acceleration were ex-
tracted from these data. Besides, the angulation be-
tween theses points and the axis x were extracted.
Thus, there is a representation of both spatial and tem-
poral features in the database. The spatial aspects
were extracted from each frame. The coordinate x
refers to the position of the point of interest in the
frame in a vertical direction; the coordinate y refers
to the position in the horizontal direction; the coordi-
nate z is expressed in millimeters in the form of the
distance between the sensor and the monitored point
of interest. The temporal aspects are the speed and
acceleration. Such aspects are expressed in terms of
scalar and vector measurements of the right and left
hands and right and left wrists. The velocity is ob-
tained from the displacement of the points of interest
in the time of three frames. The acceleration is ob-
tained from the velocity measurements.
The data were normalized nullifying body dis-
placements and the variations in the distance from the
gesture to the sensor. This also prevented the risk of
the algorithm being influenced by the movement of
a member when this movement did not in fact exist.
For example, when a person raises his right hand and
waves their whole body briefly forward or backward,
the right hand does not move in the light of this de
facto gesture. However, there is some variation in the
hands coordinates that may influence whether or not
the algorithm treats this variation as a gesture. The
Wavelet filter was also employed for the data in an at-
tempt to make an improvement in discriminating the
phases of the gestures (Semmlow and Griffel, 2014).
The effect of the filter on the data is illustrated in
Figure 2. The information about angulation was also
added; this is calculated from the spatial coordinates
of the hands and the spine and the spatial coordinates
of the hands and their respective wrists.
5.2 Design of the Experiments
The experiments were implemented by using
MATLAB
R
environment. A number of MLP were
trained and tested.
Tests on spatial data both without a filter and with
a Wavelet filter. There are 4,950 test cases for this
Multidimensional Representations for the Gesture Phase Segmentation Problem - An Exploratory Study using Multilayer Perceptrons
351

Figure 2: Scalar speed signal of the right hand when making
a gesture: the first figure is the original signal; the second
figure is the filtered signal.
scenario. These include tests with different combina-
tions of gesture features: tests covering all the data,
tests without the information of the z coordinate, tests
with only x and y of the right hand, and tests with all
the coordinates of the right hand. Each previous case
also included tests with variations in the MLP opti-
mization algorithm (Levenberg-Marquardtalgorithm,
gradient descent – GD, GD with adaptive learning
rate, GD with momentum and GD with both adap-
tive learning rate and momentum) and in the MLP
meta-parameters. Such meta-parameters were used as
follows: initial learning rate varying in 0.1, 0.01 and
0.001; number of neurons of the hidden layer varying
in 10, 2 ×
√
x, in which x is the number of network
inputs, and n
2
= (x ×y)/ 2, in which y is the num-
ber of network outputs. Finally, variations in the di-
vision of the dataset between training, validation and
testing were added to each previous case: k-fold with
k=10 and k=3, and holdout with divisions in the pro-
portions of 70-15-15, 15-70-15, 15-15-70, 60-20-20,
20-60-20, 20-20-60, 40-30-30, 30-40-30 and 30-30-
40 for the training, validation and testing phases.
Tests with spatial coordinates and angulation,
also with and without a filter. These scenarios in-
clude a) cases with the coordinates of all points of
interest and angles, b) tests with only the angles, and
c) tests with all angles except those that are formed
between the wrist and the hand. Here, the same MLP
variations were applied to each variation referred to,
making a total of 2,970 test cases.
Tests on temporal data. These tests are conducted
as follows: a) scalar velocity, scalar acceleration, vec-
tor velocity and vector acceleration of a gesture; b)
only vector velocity and vector acceleration; c) and
only scalar velocity and scalar acceleration. The same
MLP test combinations were applied to each of these
variations, making a total of 4,950 test cases.
The gesture phase segmentation was modeled as
a multi-class classifying problem, with five possible
responses. The highest value among the five pos-
sible outputs was regarded as the “final class”. As
a result, it was possible to determine which models
yielded the results that were closer to those expected
in the gesture phase segmentation. Confusion matri-
ces were created and precision, recall, accuracy and
the F1-Score measurements were obtained from such
a matrix. As it was designed as a multi-class problem,
the evaluating measurementswere calculated for each
class. All evaluations were made considering the test
division of the dataset.
5.3 Results and Discussion
Table 1 lists the best results obtained from all the
experiments. These four best results were obtained
from models created with spatial aspects. The an-
gles was always added to the model, it was obtained
with Levenberg-Marquardt algorithm, under the 10-
fold cross validation strategy.
Table 1: Best scenarios: # - result identification; Ft - filter;
Gc - characteristics used in the gestures representation; Lr -
learning rate; Hs - number of neurons in the hidden layer.
# Ft Gc Lr Hs
1 wavelet all - ang of w-h 0.001 383
2 - all 0.001 383
3 - all 0.001 401
4 - all 0.1 401
Table 2 shows the F1-Scores of these four best
scenarios. These high scores show the significant po-
tential value of MLP for application to gesture phase
segmentation. Table 3 shows the degree of accuracy
of these four best results. The same high values were
observed, what shows a good MLP response rate both
for the identification of frames per class and for the
entire classification of the model.
Table 2: F1-Score of the best results identified for the
phases: Rest, Preparation, Stroke, Hold and Retraction.
# Rest Prep Stroke Hold Retrac
1 0.869 0.831 0.888 0.974 0.917
2 0.874 0.869 0.850 0.963 0.825
3 0.834 0.557 0.939 0.951 0.893
4 0.802 0.504 0.902 0.963 0.786
Table 3: Accuracy of the best results identified for the
phases: Rest, Preparation, Stroke, Hold and Retraction.
# Total Rest Prep Stroke Hold Retrac
1 0.827 0.784 0.847 0.849 0.949 0.864
2 0.861 0.838 0.933 0.877 1.000 0.801
3 0.804 0.729 0.693 0.898 1.000 0.806
4 0.736 0.679 0.571 0.826 1.000 0.723
The use of the Wavelet filter proved useful for
fine-tuning the results. However, although it was em-
ployed in the best results obtained, when it was not
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
352
used, the results obtained were not very different from
when it was implemented. The extent of the differ-
ence can be observed in the ranking of these four best
results. Besides, it is worth noting that the best results
were obtained when the information about angulation
was added to the data representation. This informa-
tion added an important discriminative feature which
improved the results of the classification.
Classifiers built on data representations without
the use of angulation were also successful. A good re-
sult obtained in this case is shown in Table 4. Achiev-
ing a F1-score of 0.65 in the identification of the
preparation phase is not a bad score, considering that
this is a transitional phase between the absence of
movement and movement, which usually makes it dif-
ficult to classify and differentiate it from a rest or
stroke phases. The configuration of such scenario
was: no filter, all the spatial coordinates, initial learn-
ing rate in 0.01, 355 neurons in the hidden layer,
Levenberg-Marquardt algorithm and training, valida-
tion and test with the 70-15-15 dataset division.
Table 4: Results obtained without information about angles.
Total Rest Prep Stroke Hold Retrac
F1-Score
- 0.937 0.650 0.937 0.951 0.804
Accuracy
0.902 0.999 0.571 0.934 1.000 0.696
With regard to the second best results, these in-
cluded those obtained by the models created from the
use of temporal features (velocity and acceleration).
These results were positive and were in the middle
range between the models that used angulation and
those that only had spatial coordinates. Table 5 lists
four of these satisfactory results. They were all ob-
tained from the use of the speed and acceleration data,
by means of a MLP optimized with the Levenberg-
Marquardt algorithm, initial learning rating in 0.01
or 0.001, and 472 neurons on hidden layer. In the
first three results were obtained using 10-fold cross-
validation, and in the fourth case the data was divided
in proportions of 70-15-15 in the holdout strategy.
Table 5: F1-Score and accuracy of the best results. Models
with temporal information-based representation.
# Total Rest Prep Stroke Hold Retrac
F1-Score
5 - 0.974 0.883 0.962 0.769 0.851
6 - 0.970 0.798 0.939 0.825 0.844
7 - 0.967 0.828 0.958 0.895 0.856
8 - 0.934 0.799 0.876 0.800 0.802
Accuracy
5 0.918 0.967 0.877 0.934 0.769 0.749
6 0.924 0.967 0.920 0.921 0.846 0.796
7 0.935 0.941 0.933 0.947 0.872 0.885
8 0.834 0.939 0.742 0.779 0.923 0.702
6 CONCLUSION
Gesture phase segmentation as a support for ges-
ture analysis and a means of recognizing gesture
patterns that are carried out automatically, requires
the creation of a suitable representation for the data
in question. This representation must be discrimi-
nant enough to allow machine learning algorithms to
achieve the segmentation and, hence discover knowl-
edge about gesture patterns. This study covered the
construction of representations that take account of
spatial and temporal features. The results described
in this paper confirm that the most significant results
were achieved through the complete representation of
the gesture (including all the descriptive characteris-
tics). However, the representation that includes spa-
tial aspects may impose a user-dependentor discourse
context-dependentbias to the classifiers. It means that
the classifiers performance could deteriorate if difer-
ent contexts were considered. Experiments consider-
ing more than one video are being carried out in order
to verify such hypothesis. It is also planned to assem-
ble models using the concept of rectangular data win-
dows formed by data from a sequence of n frames.
By employing such a concept, it should be possible
to create the conditions for the MLP algorithm to in-
clude information both before and after the frame has
been analyzed, and thus increase the temporal charac-
ter of the representation of the gesture.
REFERENCES
Abid, M., Petriu, E., and Amjadian, E. (2015). Dynamic
sign language recognition for smart home interactive
application using stochastic linear formal grammar.
IEEE Trans. Instrum. Meas., 64(3):596–605.
Bailador, G. and Trivi˜no, G. (2010). Pattern recognition
using temporal fuzzy automata. Fuzzy Sets and Syst.,
161(1):37–55.
Bryll, R., Quek, F., and Esposito, A. (2001). Automatic
hand hold detection in natural conversation. In IEEE
Workshop on Cues in Commun.
Caramiaux, B., Wanderley, M. M., and Bevilacqua, F.
(2012). Segmenting and parsing instrumentalists’ ges-
tures. J. of New Music Research, 41(1):13–29.
Dardas, N. H., Silva, J. M., and El-Saddik, A. (2014).
Target-shooting exergame with a hand gesture control.
Multimedia Tools Application, 70(3):2211–2233.
Dietterich, T. G. (2002). Machine learning for sequential
data: A review. In Proc. of Joint Structural, Syntac-
tic, and Statistical Pattern Recognit. Int. Workshops,
pages 15–30. Springer.
Fausett, L., editor (1994). Fundamentals of Neural Net-
works: Architectures, Algorithms, and Applications.
Prentice-Hall, Inc., Upper Saddle River, NJ, USA.
Multidimensional Representations for the Gesture Phase Segmentation Problem - An Exploratory Study using Multilayer Perceptrons
353

Freitas, F., Peres, S., Lima, C., and Barbosa, F. (2014).
Grammatical facial expressions recognition with ma-
chine learning. In Proc. of 27th Florida Artificial In-
tell. Research Society Conf., pages 180–185. AAAI.
Gebre, B. G., Wittenburg, P., and Lenkiewicz, P. (2012).
Towards automatic gesture stroke detection. In 8th Int.
Conf. on Language Resources and Evaluation, pages
231–235. European Language Resources Association.
Hachaj, T. and Ogiela, M. R. (2014). Rule-based approach
to recognizing human body poses and gestures in real
time. Multimedia Systems, 20(1):81–99.
Haykin, S. S., Haykin, S. S., Haykin, S. S., and Haykin,
S. S. (2009). Neural networks and learning machines,
volume 3. Pearson Upper Saddle River, NJ, USA:.
Jacob, M. G. and Wachs, J. P. (2014). Context-based hand
gesture recognition for the operating room. Pattern
Recognition Letters, 36:196 – 203.
Kantz, H. and Schreiber, T. (2004). Nonlinear time series
analysis, volume 7. Cambridge university press.
Kendon, A. (1980). Gesticulation and speech: Two aspects
of the process of utterance. The Relationship of verbal
and nonverbal communication, pages 207–227.
Khan, S., Bailey, D., and Gupta, G. S. (2012). Detecting
pauses in continuous sign language. In Proc. of Int.
Conf. on Mechatronics and Mach. Vision in Practice,
pages 11–15. IEEE.
Kim, D., Song, J., and Kim, D. (2007). Simultaneous ges-
ture segmentation and recognition based on forward
spotting accumulative {HMMs}. Pattern Recognit.,
40(11):3012 – 3026.
Kita, S., Gijn, I., and Hulst, H. (1998). Movement phases in
signs and co-speech gestures, and their transcription
by human coders. In Proc. of Int. Gesture Workshop
Bielefeld, pages 23–35. Springer.
Kyan, M., Sun, G., Li, H., Zhong, L., Muneesawang, P.,
Dong, N., Elder, B., and Guan, L. (2015). An ap-
proach to ballet dance training through ms kinect and
visualization in a cave virtual reality environment.
ACM Trans. on Intell. Syst. Technol., 6(2):23:1–23:37.
Lee, G. C., Yeh, F.-H., and Hsiao, Y.-H. (2016). Kinect-
based taiwanese sign-language recognition system.
Multimedia Tools and Applications, 75(1):261–279.
Liang, H., Yuan, J., and Thalmann, D. (2014). Parsing
the hand in depth images. IEEE Trans. Multimedia,
16(5):1241–1253.
Lichman, M. (2013). UCI machine learning repository.
Liu, S., Feng, J., Domokos, C., Xu, H., Huang, J., Hu, Z.,
and Yan, S. (2014). Fashion parsing with weak color-
category labels. IEEE Trans. Multimedia, 16(1):253–
265.
Liu, S., Liang, X., Liu, L., Lu, K., Lin, L., Cao, X., and Yan,
S. (2015). Fashion parsing with video context. IEEE
Trans. Multimedia, 17(8):1347–1358.
L¨ucking, A., Bergmann, K., Hahn, F., Kopp, S., and Rieser,
H. (2013). Data-based analysis of speech and gesture:
the Bielefeld Speech and Gesture Alignment corpus
(SaGA) and its applications. J. on Multimodal User
Interfaces, 7(1-2).
Madeo, R. C. B., Peres, S. M., B´ıscaro, H. H., Dias, D. B.,
and Boscarioli, C. (2010). A committee machine im-
plementing the pattern recognition module for finger-
spelling applications. In Proc. of the ACM Symposium
on Applied Computing, pages 954–958.
Madeo, R. C. B., Peres, S. M., and Lima, C. A. (2016).
Gesture phase segmentation using support vector ma-
chines. Expert Syst Appl., 56:100 – 115. In press.
Madeo, R. C. B., Wagner, P. K., and Peres, S. M. (2013).
A review of temporal aspects of hand gesture analysis
applied to discourse analysis and natural conversation.
Int. J. of C. Sci. & Inf. Tech., 5(4).
Martell, C. and Kroll, J. (2007). Corpus-based gesture anal-
ysis: an extension of the form dataset for the auto-
matic detection of phases in a gesture. Int. J. of Se-
mantic Computing, 1(04):521–536.
McNeill, D. (1992). Hand and mind: What the hands reveal
about thought.
McNeill, D. (2015). Why We Gesture: The Surprising Role
of Hand Movements in Communication. Cambridge
University Press.
Ong, S. C. and Ranganath, S. (2005). Automatic sign lan-
guage analysis: A survey and the future beyond lexi-
cal meaning. IEEE Trans. Pattern Anal. Mach. Intell.,
27(6):873–891.
Popa, D., Simion, G., Gui, V., and Otesteanu, M. (2008).
Real time trajectory based hand gesture recognition.
WSEAS Trans. on Inf. Sci. and Appl., 5(4):532–546.
Ramakrishnan, A. S. and Neff, M. (2013). Segmentation of
hand gestures using motion capture data. In Proc. of
the Int. Conf. on Autonomous Agents and Multi-agent
Systems, pages 1249–1250.
Rosani, A., Conci, N., and Natale, F. G. B. D. (2014). Hu-
man behavior recognition using a context-free gram-
mar. J. of Electronic Imaging, 23(3):033016.
Salem, M., Kopp, S., Wachsmuth, I., Rohlfing, K., and Jou-
blin, F. (2012). Generation and evaluation of com-
municative robot gesture. Int. J. of Social Robotics,
4(2):201–217.
Semmlow, J. and Griffel, B. (2014). Biosignal and Medical
Image Processing, Third Edition. Taylor & Francis.
Smith, N. A. (2011). Linguistic Structure Prediction. Mor-
gan & Claypool.
Spano, L. D., Cisternino, A., and Patern`o, F. (2012). A
compositional model for gesture definition. In Int.
Conf. on Human-Centred Softw. Eng., pages 34–52.
Springer.
Xu, W. and Lee, E.-J. (2011). Hand gesture recognition
using improved hidden markov models. J. of Korea
Multimedia Soc., 14(7):866–871.
Yin, Y. and Davis, R. (2014). Real-time continuous ges-
ture recognition for natural human-computer interac-
tion. In IEEESymp. on Visual Languages and Human-
Centric Computing, pages 113–120.
Zhu, L., Chen, Y., Lin, C., and Yuille, A. L. (2011). Max
margin learning of hierarchical configural deformable
templates (hcdts) for efficient object parsing and pose
estimation. Int. J. of Computing Vision, 93(1):1–21.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
354
