Defining Services and Service Orchestrators
Acting on Shared Sensors and Actuators
Rayhana Bouali Baghli
1,2
, Elie Najm
1
and Bruno Traverson
2
1
LTCI, T
´
el
´
ecom ParisTech, Universit
´
e Paris Saclay, 46 rue Barrault, 75013, Paris, France
2
EDF R&D, D
´
epartement ICAME, 7 boulevard Gaspard Monge, 91120 Palaiseau, France
Keywords:
Services, Service Orchestration, Internet of Things, Condition/Action Logic, Consistency Rules, Smart Home.
Abstract:
In the context of the Internet of Things (IoT), it is necessary to design services that are loosely coupled to
the objects on which they act. We call these loosely coupled services generic services. Based on a previous
work (Baghli et al., 2016) that defines a three-levelled architecture for the IoT, we first propose a declarative
approach to the design generic services for the IoT. Then, based on this declarative description, we define
service orchestrators which are high level services that are able to manage access conflicts of services to
connected objects. Next, we describe consistency rules to check validity of a generic service or an orchestrator.
Finally, we illustrate our approach with use cases around services in a smart home.
1 INTRODUCTION
In the current context of the Internet of Things (IoT),
services and the devices they manage come often bun-
dled. This strong coupling between objects and ser-
vices creates technological silos which do not foster
an open market for IoT. On the other hand, several
pragmatic initiatives, such as IFTTT (If This Then
That) (Ovadia, 2014), have recently been launched
aiming at breaking these silos. These initiatives
ease the design and development of services (called
recipes) which are not tied with a specific brand of
connected devices. While providing practical and
running solutions, these endeavors have limitations
since they do not rely on an explicit architecture or
on solid foundation principles. For instance, the issue
of service composition is not tackled, and thus recipes
cannot act on shared devices in a coordinated manner.
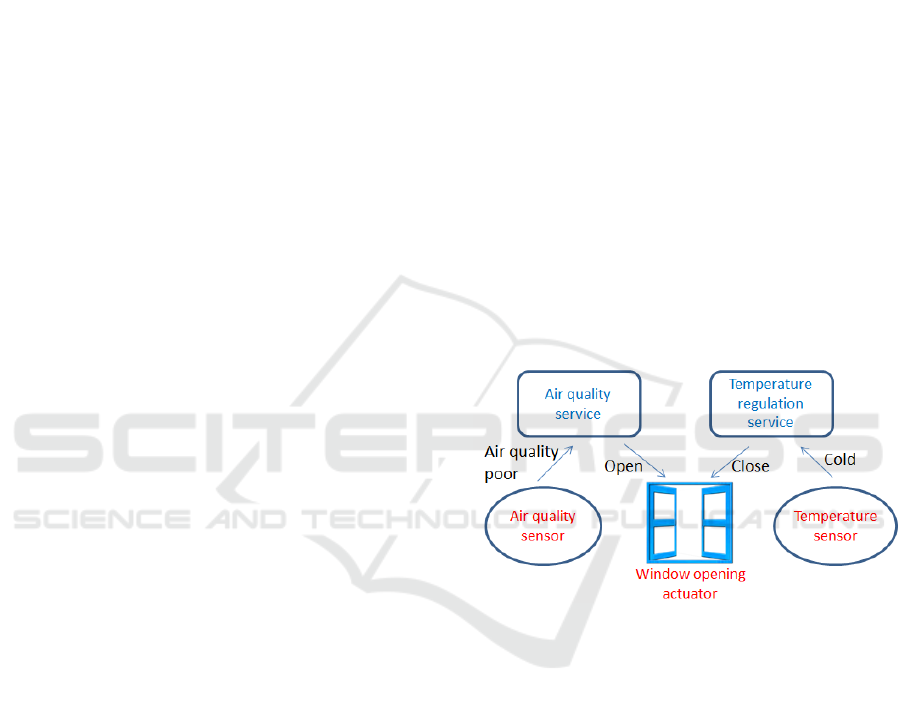
The figure below is an illustrative example of the dif-
ficulty to reason, in an asynchronous operational en-
vironment, about conflicts that can emerge when con-
currently running services act on shared devices. In
this example, the temperature regulation service re-
acts to events sent by the temperature sensor and may
request the window to be closed. The air quality ser-
vice, on the other hand, may react to events emanating
from the air quality sensor by requesting the window
to be open. This simple example shows the need for
a higher level of abstraction whereby services are de-
scribed and reasoned about on the basis of their ser-
vice logic.
Figure 1: Example of conflicting services acting on shared
devices.
In (Baghli et al., 2016), an architecture called SAR
is encompassing 3 levels of abstraction: Semantics,
Artifacts and Resources (loosely inspired by the 3
mid viewpoints of RM-ODP (Linington, 1995)). SAR
is aimed to serve as a basis for the design and de-
velopment of services for the IoT. It prescribes the
existence of type repositories for connected objects.
Hence, it allows the design of generic services that
can be bound to specific objects at deployment phase,
provided the respective types match. SAR provides
also a basis to reason about service orchestration. It
allows to define orchestrators that detect, manage and
resolve conflicts that may arise when two or more ser-
vices are bound to shared actuators. The focus of
this paper is the Semantics level. In this level, ser-
vices and orchetrators are modeled using a logical
declarative approach. Model transformations (not dis-
cussed in this paper) complement the service models
Baghli, R., Najm, E. and Traverson, B.
Defining Services and Service Orchestrators Acting on Shared Sensors and Actuators.
DOI: 10.5220/0006609402370246
In Proceedings of the 6th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2018), pages 237-246
ISBN: 978-989-758-283-7
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
237
defined in the Semantics level. A first model trans-
formation generates artifact representations of these
services (featuring events and messages) while a sec-
ond transformation provides for its restful (resource
oriented) execution environment. The reminder of the
paper is composed as follows. In section two, we pro-
vide an informal introduction to the Semantics level.
Section three presents a simplified meta-model of this
level. In section four we present a formalization of the
concepts defining the Semantics level. In section five
we discuss a validation approach using Alloy. Sec-
tion six is devoted to related work. Finally, in section
seven we conclude.
2 OVERVIEW OF THE
SEMANTICS LEVEL
Simply stated, in this level, the system is viewed as
a collection of typed read and write variables that
are read and written on by services. Sensors are ab-
stracted as read only variables. Actuators are ab-
stracted as write only variables. We also introduce
a third category of devices that we call sensactua-
tors and that correspond to the kind of actuators that
have also the capacity to sense and reveal their cur-
rent state. In the semantics level, sensactuators are
abstracted as read/write variables. The current state
of the system is reflected by the current values of the
variables composing the system. The physical envi-
ronment has the capacity to change the state of the
sensors, while services behave as agents that react to
these changes by providing the values that should be
The state of the system is given by the current values
of the variables. the which considers that the system
is managed by invariants. In this level, we deal only
with notions of states. All operational aspects like
messages exchanges between services are considered
only in the artifacts and resources levels. Semantic
level abstracts all these notions and provide a high
level way to model, orchestrate and resolve conflicts
between services.
In our approach we consider that the user choose
in a catalog some generic services and some con-
nected objects according to his personal project. Af-
ter that each of selected services is instantiated and
linked to an execution context. Also, each connected
object is installed and linked to his physical localiza-
tion. When, a least one service is instantiated, it can
be binded with objects he will rely on. The binding
process is first a selection of connected objects that
interest that instance of service, and secondly link is
created between service instance and connected ob-
jects he is binded to. A least, if an object is shared by
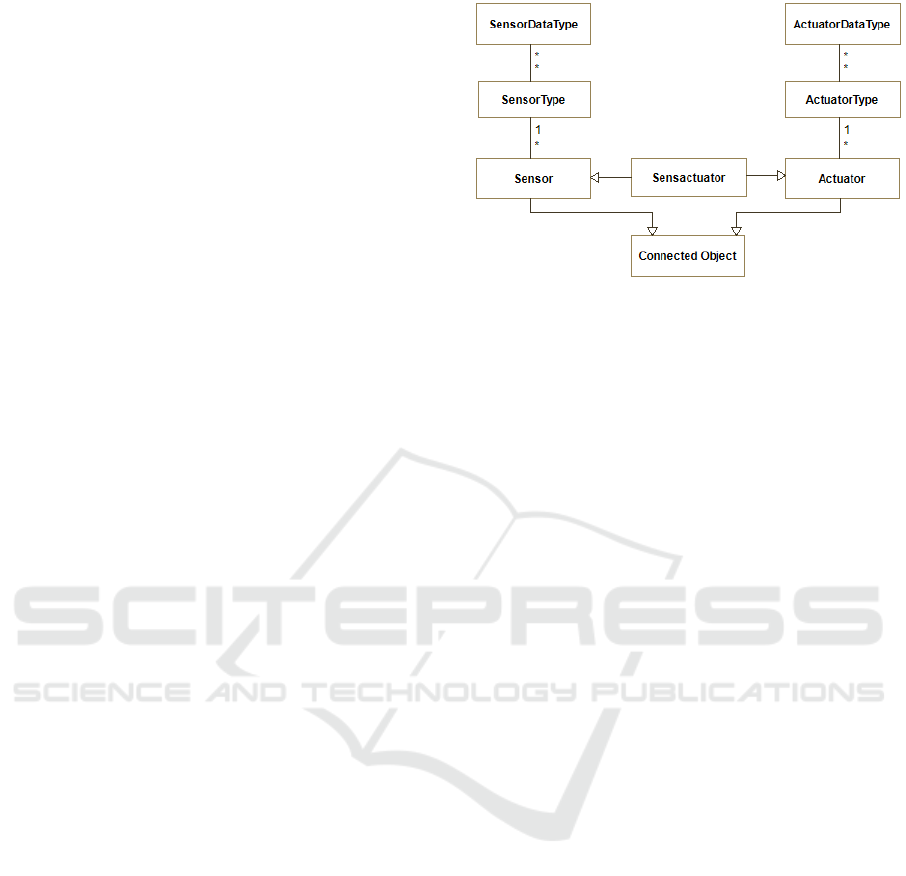
Figure 2: Meta-model of connected objects.
several services, an orchestration functionality is set
up to manage conflicts between these services.
3 META-MODEL OF THE
SEMANTICS LEVEL
In this section, we describe in some detail the con-
cepts that populate the semantic level of the SAR ar-
chitecture.
We start by describing the meta model of con-
nected objects and then we present the services meta-
model.
3.1 Connected Objects
We model connected objects as they are viewed by
services which use them. The purpose of this sec-
tion is not to provide a complete meta-model to repre-
sent connected objects, but to represent concepts that
are relevant from the semantic service model point of
view.
Objects that form the IoT are able to observe their
environment and to provide measures recorded in cor-
responding variables or to act on the envoronment by
enforcing actuators into certain states. We classify ob-
jects of the IoT in three classes : Sensors, Actuators
and Sensactuators. Sensors can sense a physical mea-
sure and send it on a network; actuators can actuate
real world objects; and sensactuators can sense state
and actuate same real world objects. So, sensors only
present data (they provide to services); actuators only
receive the target states that they need to be reached
by them; and sensactuators do both.
Figure 2 shows connected object meta-model. A
connected object could be, sensor, actuator or sens-
actuator. Each ”Sensor” is of one ”SensorType” and
each ”SensorType” can be related to several sensors.
Semantically, this relation represents a classification
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
238
of sensors.”Temperature sensor” and ”Light sensor”
are two examples of sensor types.
In the same way, actuators are classified into actu-
ator types.
On the other hand, each ”SensorType” concept is
related to ”SensorDataType” concept. Sensor data
types are types of data sent by sensors on the network.
”ActuatorType” concept is related to a ”Actuator-
DataType” concept. Actuator data types define sets of
elements which could be handled by actuators.
”Sensactuator” concept is subtype of ”Sensor” and
”Actuator” concepts. When a connected object is con-
sidered as a sensactuator, its sensor type and actuator
type are linked to each other. Its sensor data types and
actuator data types are also linked to each other. This
relation is an equality or an inclusion relation.
3.2 Services for the IoT
This section describes services meta-model which al-
lows to describe generic services independently from
the connected objects they would rely on.
Orchestrators are services that are able to manage
access conflicts of services to connected objects.
Service meta-model is split into two compati-
ble meta-models : Structural meta-model and Be-
havioural meta-model. These meta-models are pre-
sented in detail in the two following sections.
3.2.1 Structural Modelling
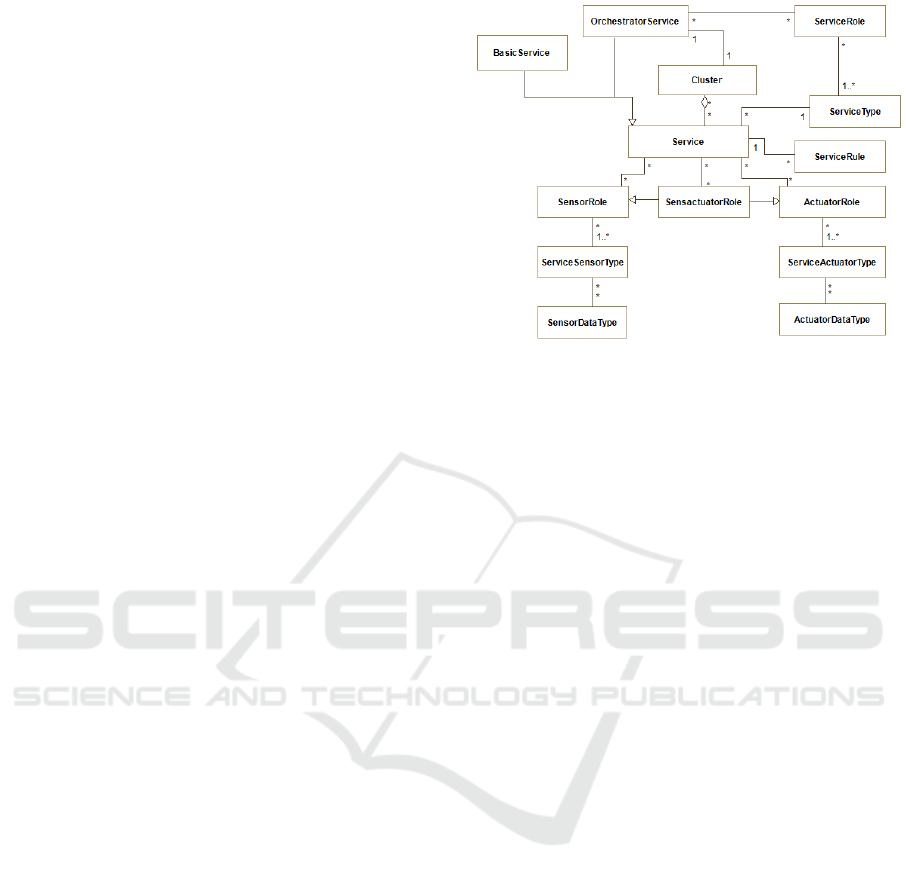
Figure 3 depicts the service structural meta-model.
In order to model services independently from con-
nected objects, these services are described in terms
of roles. Roles can be sensor roles, actuator roles
or sensactuators roles. Each role can be played by
several ”service object types” which are ”service sen-
sor type”, ”service actuator type” or ”service sensac-
tuator type”. An example of a sensactuator role for
a ”temperature regulation service” could be a ”heat
source”. Some examples of service sensactuator types
which can play this role could be ”electric heater”,
”gas boiler” or ”heating floor”.
Service structural meta-model describes ”Sensor-
DataType” and ”ActuatorDataType ”. Sensor data
types and actuator data types concepts define data
types that the service can handle.
Service rules describe behaviour of the service,
this concept is depicted in detail in the section 3.2.2.
A ”Cluster” is an entity that groups a set of ser-
vices that share actuators or sensactuators. Two ser-
vices of the same cluster could directly or via a transi-
tive closure share actuators or sensactuators. Services
that are part of the same cluster are orchestrated by
one Orchestrator.
Figure 3: Meta-model of IoT services structure.
The structural meta-model allows description of
basic services and orchestors. In addition to struc-
tural concepts which are described in basic services,
orchestrators include service roles. These roles can be
played by several service types.
We have described structural modelling of ser-
vices and we present, in the next section, behavioural
modelling of these services based on concepts of the
structural part of the meta-model.
3.2.2 Behavioural Modelling
The aim of the semantic level of our architecture is to
propose a modelling of services that is close to user
needs. So, we choose to model the services in terms
of goals rather than actions.
Declarative approaches are used to describe objec-
tives to be achieved rather than procedures to be fol-
lowed. Our proposition has naturally been based on a
declarative approach for describing service behaviour
as a set of service rules. These rules describe ser-
vice objectives disregarding on how these goals can
be achieved.
Figure 4 depicts the service behaviour meta-
model. Each rule is composed by one premise and
one conclusion.
The premise describes the condition that triggers
the rule, and the conclusion represents the conse-
quence of triggering the rule. The premise concept
is related ”CurrentState” and ”PreCondition” con-
cepts. The combination of instances of these two con-
cepts triggers a service rule that describes them in its
premise.
The precondition concept is an expression that can
be evaluated, for a particular current state, as ”true” or
”false”. The current state concept is a specialization
of the ”State” concept. It represents the current state
Defining Services and Service Orchestrators Acting on Shared Sensors and Actuators
239
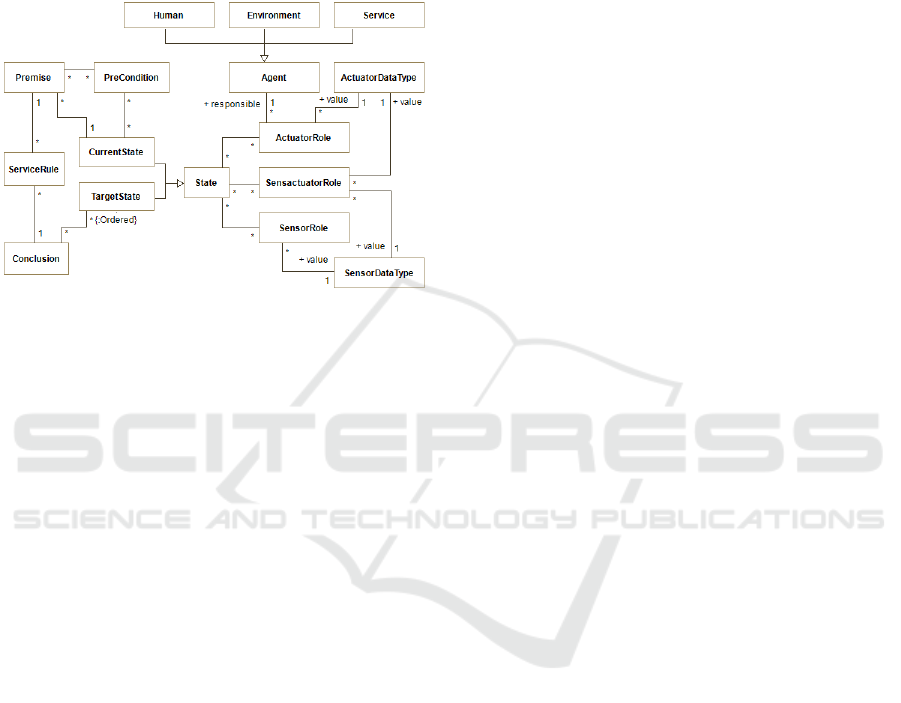
of some roles that are part of the structural model of
the service.
In addition to objects states, each actuator role is
related to an ”Agent” concept. Agent concept de-
scribes the responsible of the current actuator state.
This responsible could be a human, a service or the
environment.
Figure 4: Meta-model of IoT services behaviour.
The concept of conclusion represents the conse-
quence of a service rule. The conclusion is related to
a set of ”TargetState” and each target state is related
to a ”StateCategory”. ”Desired state” and ”Tolerated
state” are two examples of state category instances.
The ordered set of target states represents choices,
from the most desired to the least desired target state
of the service rule. This ordered set of target states
represents several preferences of the service rule.
In the same way, each service could describe a set
of ordered target states as potential reactions to one
current state. The advantage of describing a set of
target states in a conclusion instead of a single tar-
get state can be seen in a configuration that contains
several services acting on same objects. In this case,
one or more orchestrators will orchestrate these ser-
vices. If the services express several choices of tar-
get states, then the orchestration process will be more
flexible. The orchestrator would be able to satisfy sev-
eral services by choosing a target state which satisfies
the greatest number of services but which is not nec-
essarily the first choice for each service.
We have described meta-models which are part of
the semantic level, we present in the next section, for-
mal representations of services and service composi-
tions and a set of checking rules for each of them.
4 FORMALIZATION OF THE
SEMANTICS LEVEL
In this section, we present formal descriptions of ser-
vices and service compositions;
5 SMARTHOME
A smart home is defined as a triple made of a set of
devices, a collection of services and a set of bind-
ings that allow to deploy services on the devices of
the smart home.
SmartHome = (DEV, Serv, Bindings)
6 DEVICES
The set of devices is a disjoint union of sensors (SE),
actuators (AC) and sensactuators (SA).
DEV = SE ] AC ] SA We will use d to de-
note any device and we will assume the existence of a
mapping kind : DEV ⇒ {S , A, SA}
with d.kind = S ⇔ d ∈ SE(respectively A, SA).
Actually, as seen by services, devices represent
read (sensors), write (actuators) and read/write (sens-
actuators) variables.
The set RD = SE ∪ SA is the subset of variables
that can be read by services and W D = SA ∪ AC
those that can be written.
We denote by Val
DEV
, Val
SE
, Val
AC
, Val
SA
, Val
RD
,
Val
W D
the set of values taken respectively by all de-
vices, sensors, actuators, sensactuators, readable and
writable variables.
We let se denote any sensor, ac, any actuator, sa,
any sensactuator, rd, any readable device (sensor or
sensactuator) and wd any writable device (actuator or
sensactuator).
7 STATE OF A SMART HOME
The running state of smart home is any function that
maps devices to values. States can be global on all
devices or partial on a subset of devices:
global state : GS : DEV → Val
DEV
read state : RS : RD → Val
RD
write state : W S : W D → Val
W D
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
240

8 SERVICES
Informally, a service is an active entity that acts on a
set of associated roles , reading from the read roles
and reacting by writing on the write roles.
More formally,
A service S is a couple S = (Ro, Ru) with
Ro a set of roles
Ru a set of rules : Ru = R
1
, ..., R
n
Ro is equiped with the kind function similar to
DEV .
Hence, for a role r, r.kind ∈ {S, A, SA} is its kind:
sensor, actuator or sensactuator.
Ro.RR = {r|r.kind ∈ {S, SA}} is the subset of
readable roles and
Ro.W R = {r|r.kind ∈ {A, SA}} is the subset of
writable roles.
Each role has an associated domain of values
(which depends on its type).
We let Val
RR
(Ro) the set of values of all readable
roles in Ro and Val
W R
(Ro) the set of all writable roles
in Ro.
A rule R ∈ Ru is of the format R = (Pre, NS)
with
Pre is the precondition of the rule. It is a predicate
that evaluates on readable roles. The concrete syntax
depends on the types of readable roles.
If rs is a readable state on roles i.e. rs : Ro.RR →
Val
RR
(Ro) then Pre(rs) ∈ {true, f alse}
NS is a priorized list of next states of write roles
with
NS = (ns
1
, ..., ns
k
)
A next state ns is a partial function ns : Ro.W R →
Val
W R
(Ro)
We denote NS.W R the set of write roles appearing
in NS.
A service is well formed iff the following condi-
tion holds
∀ R
i
, R
j
with i 6= j , R
i
= (Pre
i
, NS
i
), R
j
=
(Pre
j
, NS
j
), ∀ rs, Pre
i
(rs) = True ⇒ Pre
j
(rs) =
False
9 BINDINGS
Given a smart home equiped with a set of devices and
a collection of independently defined services ready
to be deployed, we need to define the notion of de-
ployable and deployed services. To do so, we use, for
each service, a bind function that maps roles to de-
vices.
9.1 Valid Binding
Given a well formed service, S = (Ro, Ru) and Bind,
a map, Bind : Ro → DEV
Bind is said to be a valid deployment map with
regard to S iff it satisfies the following two conditions:
(i) Kind compatibility: ∀r ∈ Ro, Bind(r).kind =
r.kind
(ii) Injectivity on writable devices: ∀ r, r
0
: r 6= r
0
with r ∈
R
o.W R, r
0
∈ Ro.W R : Bind(r)6= Bind(r
0
)
Condition (i) stipulets that roles are mapped on de-
vices of the same kind. We will assume also that there
is a compatibility between the types of roles and the
types od devices they are bound to and that the do-
mains of values are identical between roles and the
bound devices.
Condition (ii) enforces that wr writable roles can-
not be bound to the same device.
10 DEPLOYED SERVICES
A deployed service is a couple (DD, DRu) where DD
is a set of devices and DRu is a set of rules acting on
the set of devices. A deployed service is similar to a
service, except that roles are replaced with devices.
Given a couple (S, Bind), with S a well formed
service and Bind a valid deployment map, with S =
Ro, Ru and Ru = {(Pre
1
, NS
1
), ..., (Pre
n
, NS
n
)}
We can define a deployed service DS where roles
are substituted wth devices as follows :
Bind (S) = (Bind (Ro) , Bind (Ru))
Where Bind (Ro) is the codomain of Bind and
Bind (Ru) is the set of rules obtained by replacing in
each rule of Ru roles by their corresponding bound
devices.
Claim: if S is well formed then Bind (S ) is well
formed.
11 DEPLOYED SMART HOME
Considering a smart home with devices DEV , ser-
vices Serv, and BIND, a set of valid deployable maps,
one can define a deployed smart home where services
are replaced by deployed services. To that end, since
different services can act on shared actuators, we need
to introduce mechanism to resolve conflicts between
services accessing the same actuators.
A deployed smart home is a couple (DEV, DServ)
where DEV is a set of devices and DServ a list of
prioritized deployed services, i.e. a totally ordered set
of deployed services.
Defining Services and Service Orchestrators Acting on Shared Sensors and Actuators
241

11.1 Cluster
A cluster is the unit for orchestration. Services of the
same cluster are orchestrated based on their priorities
given a read state.
A cluster of services C is an ordered list of de-
ployed services compatible with the order in DServ,
(DS
1
, ..., DS
n
) and such that ∀ i, j :
DS
i
sh
∗
DS
j
where sh is a binary relation on deployed services
defined by
DS sh DS
0
↔ ∃ wd such that wd ∈ DS and wd ∈
DS
0
and sh
∗
is the transitive closure of sh i.e.
DS sh ∗ DS
0
i f f ∃ {DDS
1
, ..., DDS
n
} ⊂
DSERV such that
DDS
1
= DS ∧ DDS
k
= DS
0
∧ ∀ i < k − 1 :
DDS
i
sh DDSi + 1
11.2 Conflict Resolution within a
Cluster of Orchestrated Services
Given a cluster C = (DS
1
, ..., DS
n
) with DS
i
=
(DD
i
, DRui) where
DRui = (Pre
1
i
, NS
1
i
), ..., (Pre
k
i
, NS
k
i
)
For given read state RS, let DS
i
1
, ..., DS
i
m
the sub-
set of services for which one premisse is true on RS.
Let us call Pre
i
p
the premiss true for service DS
i
p
and NS
i
p
the associated next state.
NS
i
1
= ns
1
i
1
, ..., ns
q
i
1
i
1
.
.
.
NS
i
m
= ns
1
i
m
, ..., ns
q
i
m
i
m
The next state that maximizes satisfaction of high
priority service is given as follows :
1) We define the set Max
1
, the set of next state that
maximize the function f
f = 2
m
(ns
1
i
m
∨ ... ∨ ns
q
i
m
i
m
) + ... + 2(ns
1
i
1
∨ ... ∨ ns
q
i
1
i
1
)
2) For ns ∈ Max
1
we define function f
0
f
0
(ns) = 2
m
(2
q
i
m
(ns → ns
q
i
m
i
m
) + ... + 2(ns → ns
1
i
m
)) +
... + 2(2
q
i
1
(ns → ns
q
i
1
i
1
) + ... + 2(ns → ns
1
i
1
))
Let Max
2
the set of states ns
0
that maximizes func-
tion f
0
Max
2
contains exactly one element that we call
NS
sat
which is selected as the next state corresponding
to read state RS, that maximizes satisfaction.
In this section, we presented formal service and
service composition descriptions. These descriptions
and properties allows to represent formally services
and service compositions to check validity of them
and then to bind them with connected objects. The
next section presents how we validate our approach
using smart home use cases.
12 VALIDATION
In order to validate our approach, we define three
generic services in the field of smart home use-cases,
including two basic services and a service composi-
tion of the two basic services we define.
As a first step, each generic service is described
in natural language and part of its structural and be-
havioural descriptions are exposed.
Next, we implement in the Alloy Analyzer (Jack-
son, ), our meta-models, services and compositions
models, and checking rules. In order to make vali-
dation process less complex, we suppose that generic
services have already been instantiated and bound to
connected objects. So we implement instantiated ser-
vices instead of generic ones.
12.1 Smart Home Use Cases
We define in this section three generic services in the
field of smart homes. Two basic services ares de-
scribed : a temperature control service and an energy
management service. The third one is a composition
of the first two basic services and concerns an eco-
nomical temperature control service.
In this section each generic service example is first
described in natural language. Then, part of structural
and behavioral descriptions of each generic service
are shown.
12.1.1 Temperature Control Service
The temperature control service we define aims to
regulate the temperature in its execution context. The
execution context could be a room, a set of rooms,
a floor or the whole house. This service is intended
to regulate temperature in winter mode. It is inter-
ested in all objects that produce heat, such as heaters
or boilers. It also considers objects which measure
temperature inside and outside its execution context.
Structural Definition. The structural definition de-
scribes sensors, actuators and sensactuators roles. We
give here an example of a sensactuator role which is
defined by our temperature control service :
SensactuatorRole: Source of heat
• ServiceSensactuatorType1: Electric heater.
– ActuatorDataType1: ”On, Off”
– SensorDataType1: ”On, Off”
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
242

• ServiceSensactuatorType2: Gas boiler.
– ActuatorDataType2: ”On, Off”
– SensorDataType2: ”On, Off”
This sensactuator role describes a source of heat
role. This role could be played by two types of sen-
sactuator objects : electric heater and gas boiler. The
role description defines also sensactuators data types
which the service can handle. In this description, sen-
sor and actuator data types are ”On, Off” for both sen-
sactuator types.
Behavioural Definition. The behavioural definition
describes a set of service rules. An example of the
temperature control service rule is given as follows
• If internal temperature is lower than target temper-
ature and source of heat is an electric heater then
the electric heater is on.
This rule links between the ”source of heat” role
and the ”electric heater” object type. Another rule
describes the case of that role is played by the ”gas
boiler” object type.
12.1.2 Energy Management Service
The energy management service aims to control en-
ergy consumption of its execution context by avoiding
a set of energy loss scenarii. This service is interested
in all objects which consume energy and all objects
through which there may be a loss of energy. An ex-
ample of an energy loss scenario is an opened window
when a heater is turned on. Another example of en-
ergy loss may be a light which is switched on in an
empty room.
Structural Definition. The energy management
service structural definition describes roles of sensors,
actuators and sensactuators. Each of these roles could
be played by one or several objects types and each
object type is linked to the object data type which the
service can handle.
SensactuatorRole: Energy loss source
• ServiceSensactuatorType1: Window.
– ActuatorDataType1: ”Open, Close”
– SensorDataType1: ”Open, Close”
• ServiceSensactuatorType2: Light.
– ActuatorDataType2: ”On, Off”
– SensorDataType2: ”On, Off”
This sensactuator role describes a source energy
loss role. This role could be played by two types
of sensactuator objects : Window and Light. In this
example, window sensor and actuator data types are
”Open, Close” and Light sensor and actuator data
types are ”On, Off”.
Behavioural Definition. The behavioural definition
describes the rules of the service. As for the other
services, each energy management rule links between
roles, objects types which could play these roles and
object data types.
• If heater is on and and energy loss source is a win-
dow then the window is close.
This rule aims to avoid the energy loss scenario
where a window is open when a heater is turned on.
12.1.3 Economical Temperature Control Service
The economical temperature control service we de-
fine is a composition of two services : a temperature
control service and an energy management service.
This composite service aims to control temperature in
its execution context while limiting the loss of energy.
Structural Definition. Our example of economical
temperature control service defines two service roles:
a temperature control service roles and a service role
for managing energy consumption. It does not define
object roles but relies on roles which are defined by
temperature control and energy management services.
Behavioural Definition. The economical tempera-
ture control service does not define behavioural rules,
but it relies on rules which are defined by temperature
control and energy management services.
12.2 Validation on Alloy
Alloy is a notation inspired by the Z language. It
adopts a declarative modelling approach and relies
on logic of the first order. Alloy allows to describe
models and constraints which apply on these models
(Jackson, 2012).
In addition to describing models and constraints,
Alloy allows to check validity of these models. Alloy
relies on a SAT solver which transforms constraints
into booleans and performs validations on models ac-
cording to these constraints. For more details please
refer to (Jackson, 2012).
For validations of our approach, we use the Al-
loy Analyzer (Jackson, ) which supports description
of Alloy models and their automated analysis. The
Alloy Analyzer allow two types of checking : Sim-
ulation and assertion checking. Simulation looks for
Defining Services and Service Orchestrators Acting on Shared Sensors and Actuators
243
an instance of the model which conforms the specifi-
cation. And assertions checking verify, in a scope that
all instances verify validity constraints. The scope
could be formed by billions of instances.
For our simulations and validations in alloy, we
translate smart home use cases models in Alloy and
implement them in the Alloy Analyzer. We imple-
ment service and service composition properties to
simulate and validate the services we define.
When translating our models and meta-models,
we followed the procedure described in (Anastasakis
et al., 2007) where classes are translated to signatures
and association ends are translated to signature fileds.
It is possible to add facts to the Alloy model to trans-
late the multiplicity constraints of the metamodel.
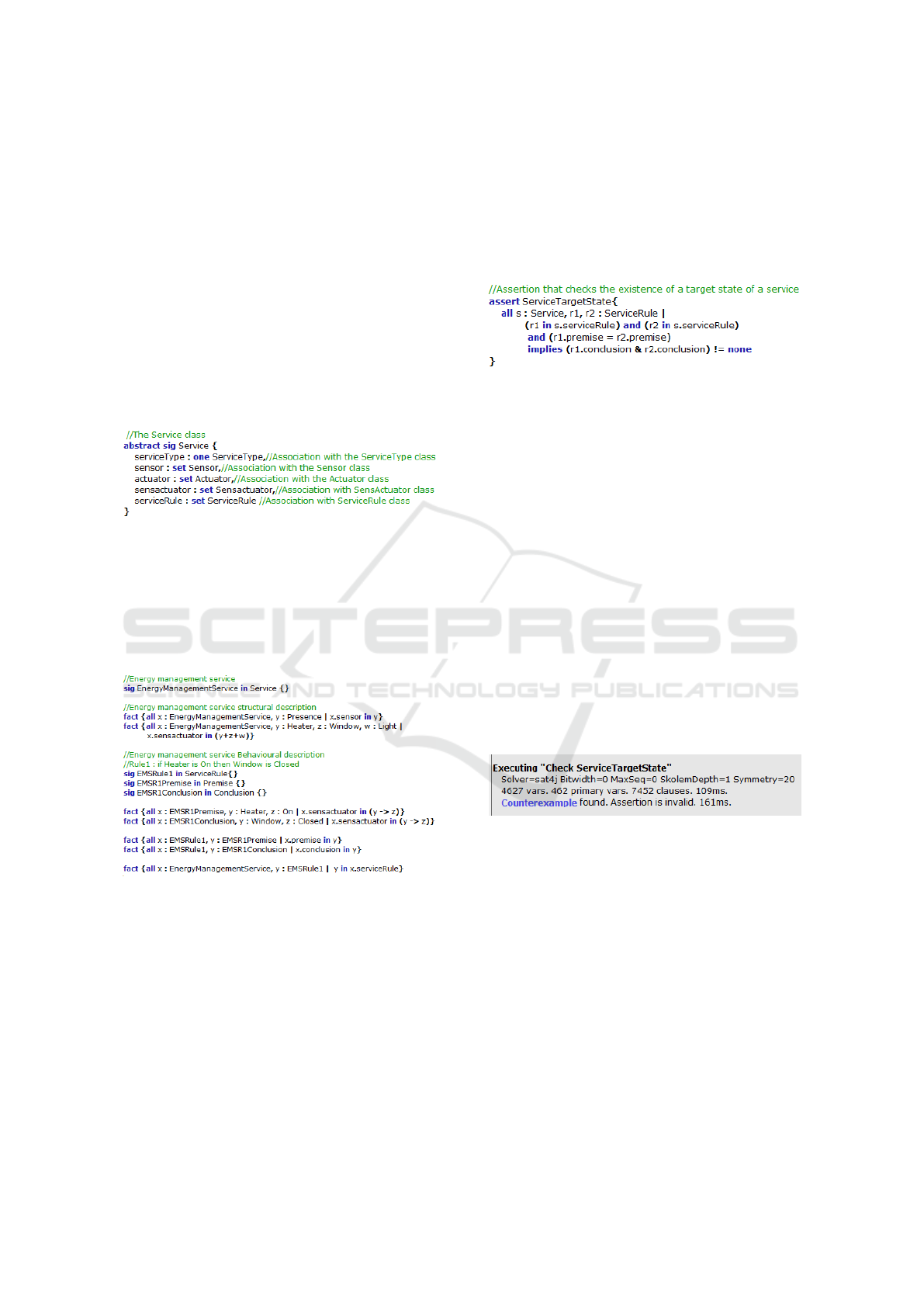
Figure 5: Portion of the metamodel implemented in Alloy.
Figure 5 shows a portion of our Alloy code. This
portion of code implements the Service class which
is defined as a signature (sig) and each association is
defined as a fields of that signature. The multiplicity
constraints on the association ends are here translated
by the ”one” and ”set” keywords.
Figure 6: Portion of the energy management service imple-
mented in Alloy.
Figure 6 depicts a portion of our Energy man-
agement service code in Alloy. The first part of our
code (Line 1) defines the energy management service
as a signature which is in the ”Service” signature.
The second part of our code describes structural de-
scription of the energy management service. In the
structural description, we define connected objects on
which our service acts. Connected objects which are
rely to our service are presence sensor, heater, win-
dow and light. The third part of the Alloy code depicts
a portion of the behavioural description of our en-
ergy management service. It describes one rule which
states that if heater is on then window is close.
After translating our meta-models and models in
Alloy, we translate service properties and service
composition properties. Once translated in Alloy,
these properties represent checking rules to validate
services and service compositions.
Figure 7: Service target state checking implemented in Al-
loy.
Figure 7 shows an example of service checking
rule. This rule is expressed as an assertion and it al-
lows to verify existence of a target state for a service.
This assertion rule example verifies that for two rules
that are triggerable simultaneously, it is possible to
find a common target state. Concretly, it verifies that
intersection of these triggerable rules conclusions is
not empty.
After defining checking rules as assertions, we can
verify validity of services. We implement an example
of non valid energy management service. This service
has two triggerable rule whose conclusions intersec-
tion is empty. Figure 8 shows that the Alloy Analyzer
founds a counter example which invalidates the ”ser-
vice target state” assertion. It means that the target
state assertion is invalide for our model. The Alloy
analyzer can also show graphically the counter exam-
ple he finds and which invalidates the assertion.
Figure 8: Service target state checking result.
The sample code and results we present show the
approach we take to verify the validity of services and
service compositions using the verification rules we
describe in section V and using the Alloy Analyzer
tool.
13 RELATED WORK
In the field of service composition and services con-
ception, many efforts have been done in order to pro-
vide platforms and languages for building heteroge-
neous systems. Standards have be defined to dis-
cover, describe and invoke Web services like WSDL
(Web Services Description Language) (Christensen
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
244

et al., 2001), UDDI (Universal Description, Discov-
ery, and Integration) (Bellwood et al., 2002), SOAP
(Simple Object Access Protocol) (Box et al., 2000)
or also DAML-S ontology (Ankolekar et al., 2002).
BPEL4WS (Business Process Execution Language
for Web Services) (Andrews et al., 2003) allows to
compose dynamically services by describing mes-
sages exchanges between services when they are
known a priori. Authors of (Ponnekanti and Fox,
2002) proposed another approach called SWORD
which consists in a set of tools to compose web ser-
vices.
In the filed of conflicts resolution for the Inter-
net of Things, authors of (Bertran et al., 2014) pro-
posed Diasuite, a tool to develop SCC (Sense Com-
pute Control) applications. The SCC paradigm allows
to collect data from sensors, to compute them and to
command actuator for acting on their environment.
To manage conflicts, authors also proposed in (Jakob
et al., 2011) an approach based on a DSL extension.
This approach generates at runtime a code to man-
age conflicts. The major limitation of this approach is
that conflicts management is not fully automatic and
developers have to act in conflicts resolutions.
Other recent efforts are done in conflicts resolu-
tion between shared devices. In (Hadj et al., 2016),
authors describe an approach which aims to manage
conflicts when devices are shared by several appli-
cations. They proposed to add an autonomic access
layer in pervasive platform that is called iCASA (Es-
coffier et al., 2014). This platform provides a service
oriented component model to develop pervasive ap-
plications. These efforts seem to be interesting but
are already in a preliminary phase. There is not yet a
formal model which could resolve conflicts manage-
ment.
The difference between these approaches and the
one we develop in this paper resides in the fact that we
have described in (Baghli et al., 2016) a multilevelled
architecture. This architecture allows to abstract at the
semantic level all exchanges of messages and tempo-
ral aspects which are related to conception and com-
position of services and conflicts management reso-
lution between services on shared objects. Our ap-
proach considers that the semantic level is managed
by invariants and deals only with states of the system.
All aspects of message exchanges, actions that move
the system from one state to another one are dealt by
the artefacts level of our architecture.
Many work have also been done in the field of
connected objects modelling, ontologies like (Comp-
ton et al., 2012) and (Seydoux et al., ) propose to
model connected sensors and actuators. In fact our
work is not focused on objects modelling but repre-
sent, for each level of our architecture, objects like
they are viewed from that level services perspective.
So, in each level, we describe a meta-model of con-
nected objects which is adapted to the needs and prin-
ciples of this level.
14 CONCLUSION AND FUTURE
WORK
We present in this paper an approach to model generic
services independently of connected objects. This
approach deals with service composition and objects
sharing between several services. We have described
the meta-models on which our proposal is based. We
also described formal representations of services and
service compositions. Checking rules have been de-
fined to verify the validity of services and service
compositions. In order to validate our proposal, we
have implemented smarthome use cases in the Alloy
Analyzer tool.
In our future work, we would complete our ap-
proach by implementing a platform for the design-
time modeling and runtime management of IoT ser-
vices. We would also formally define an operational
meta-model and model tranformations.These model
tranformations should allow to translate the high level
semantic models to operational models.
REFERENCES
Anastasakis, K., Bordbar, B., Georg, G., and Ray, I. (2007).
Uml2alloy: A challenging model transformation. In
International Conference on Model Driven Engineer-
ing Languages and Systems, pages 436–450. Springer.
Andrews, T., Curbera, F., Dholakia, H., Goland, Y., Klein,
J., Leymann, F., Liu, K., Roller, D., Smith, D., Thatte,
S., et al. (2003). Business process execution language
for web services.
Ankolekar, A., Burstein, M., Hobbs, J. R., Lassila, O., Mar-
tin, D., McDermott, D., McIlraith, S. A., Narayanan,
S., Paolucci, M., Payne, T., et al. (2002). Daml-s: Web
service description for the semantic web. In Inter-
national Semantic Web Conference, pages 348–363.
Springer.
Baghli, R. B., Najm, E., and Traverson, B. (2016). To-
wards a multi-leveled architecture for the internet of
things. In Enterprise Distributed Object Computing
Workshop (EDOCW), 2016 IEEE 20th International,
pages 1–6. IEEE.
Bellwood, T., Cl
´
ement, L., Ehnebuske, D., Hately, A.,
Hondo, M., Husband, Y., Januszewski, K., Lee, S.,
McKee, B., Munter, J., et al. (2002). The universal
description, discovery and integration (uddi) specifi-
cation. Rapport technique, Comit OASIS.
Defining Services and Service Orchestrators Acting on Shared Sensors and Actuators
245

Bertran, B., Bruneau, J., Cassou, D., Loriant, N., Balland,
E., and Consel, C. (2014). Diasuite: A tool suite to
develop sense/compute/control applications. Science
of Computer Programming, 79:39–51.
Box, D., Ehnebuske, D., Kakivaya, G., Layman, A.,
Mendelsohn, N., Nielsen, H. F., Thatte, S., and Winer,
D. (2000). Simple object access protocol (soap) 1.1.
Christensen, E., Curbera, F., Meredith, G., Weerawarana,
S., et al. (2001). Web services description language
(wsdl) 1.1.
Compton, M., Barnaghi, P., Bermudez, L., Garc
´
ıA-Castro,
R., Corcho, O., Cox, S., Graybeal, J., Hauswirth, M.,
Henson, C., Herzog, A., et al. (2012). The ssn on-
tology of the w3c semantic sensor network incubator
group. Web semantics: science, services and agents
on the World Wide Web, 17:25–32.
Escoffier, C., Chollet, S., and Lalanda, P. (2014). Lessons
learned in building pervasive platforms. In Con-
sumer Communications and Networking Conference
(CCNC), 2014 IEEE 11th, pages 7–12. IEEE.
Hadj, R. B., Chollet, S., Lalanda, P., and Hamon, C.
(2016). Sharing devices between applications with au-
tonomic conflict management. In Autonomic Comput-
ing (ICAC), 2016 IEEE International Conference on,
pages 219–220. IEEE.
Jackson, D. Alloy website. http://alloy.mit.edu/alloy/index.
html. Accessed on Sep. 30, 2017.
Jackson, D. (2012). Software Abstractions: logic, language,
and analysis. MIT press.
Jakob, H., Consel, C., and Loriant, N. (2011). Ar-
chitecturing conflict handling of pervasive comput-
ing resources. In IFIP International Conference on
Distributed Applications and Interoperable Systems,
pages 92–105. Springer.
Linington, P. F. (1995). Rm-odp: the architecture. In Open
Distributed Processing, pages 15–33. Springer.
Ovadia, S. (2014). Automate the internet with if this then
that (ifttt). Behavioral & Social Sciences Librarian,
33(4):208–211.
Ponnekanti, S. R. and Fox, A. (2002). Sword: A developer
toolkit for web service composition. In Proc. of the
Eleventh International World Wide Web Conference,
Honolulu, HI, volume 45.
Seydoux, N., Alaya, M. B., Drira, K., Hernandez, N., Mon-
teil, T., and Haemmerl
´
e, O. San (semantic actuator
network). https://www.irit.fr/recherches/MELODI/
ontologies/SAN.html. Accessed on Sep. 30, 2017.
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
246
