
Novel Anomalous Event Detection based on Human-object Interactions
Rensso Mora Colque
1
, Carlos Caetano
1
, Victor C. de Melo
1
,
Guillermo Camara Chavez
2
and William Robson Schwartz
1
1
Universidade Federal de Minas Gerais, DCC, Belo Horizonte, Brazil
2
Universidade Federal de Ouro Preto, ICEB, Ouro Preto, Brazil
Keywords:
Anomalous Event Detection, Human-object Interaction, Contextual Information.
Abstract:
This study proposes a novel approach to anomalous event detection that collects information from a specific
context and is flexible enough to work in different scenes (i.e., the camera does need to be at the same location
or in the same scene for the learning and test stages of anomaly event detection), making our approach able
to learn normal patterns (i.e., patterns that do not entail an anomaly) from one scene and be employed in
another as long as it is within the same context. For instance, our approach can learn the normal behavior for
a context such the office environment by watching a particular office, and then it can monitor the behavior in
another office, without being constrained to aspects such as camera location, optical flow or trajectories, as
required by the current works. Our paradigm shift anomalous event detection approach exploits human-object
interactions to learn normal behavior patterns from a specific context. Such patterns are used afterwards
to detect anomalous events in a different scene. The proof of concept shown in the experimental results
demonstrate the viability of two strategies that exploit this novel paradigm to perform anomaly detection.
1 INTRODUCTION
Anomaly detection for video surveillance has gained
importance in academy and industry. Therefore, re-
searches have focused in extracting characteristics
that help to determine anomalous events, without
departing from context. This challenging task in-
crements its hardness as semantic information of
anomaly is added.
Many studies are based on a typical pipeline em-
ploying representations based on spatiotemporal fea-
tures (low level characteristics extracted from tempo-
ral regions) (Hasan et al., 2016; Wang and Xu, 2016;
Zhou et al., 2016; Cheng et al., 2015; Colque et al.,
2015; Leyva et al., 2017) followed by one-class clas-
sification to determine whether an event is anomalous.
These approaches model anomalies using characteris-
tics such as velocity (magnitude, orientation), appear-
ance, density and location. However, this type of in-
formation is not well-suited for solving the anomalous
event detection problem since it is constrained to the
same camera view, preventing the detection to be per-
formed on different scenes within the same context.
For instance, it prevents one from learning normal
patterns in one particular office and detect anomalous
events in another office. On the other hand, our pro-
posed approach is based on human-object interactions
for a specific context, which is more flexible and al-
low performing anomaly detection on different scenes
within the same context.
Common representations for anomaly detection
are based on the following low-level characteristics:
texture (appearance), optical flow information (mag-
nitude and orientation) and agent location. Such type
of features fits well only in approaches focusing on
anomaly detection for specific views, i.e., the infor-
mation extracted from a particular scene cannot be
used to detect anomalies in other scenes (e.g., a differ-
ent camera view) because they are camera-dependent.
Therefore, the investigation of approaches focused on
higher-level semantic information is desired for per-
forming a more flexible anomaly detection.
In this paper, we address the problem of anomaly
detection with a different perspective. The main idea
is to learn information regarding one context (e.g., of-
fice or classroom environments) from a specific scene
(e.g., a particular office of classroom) and use that in-
formation to detect anomaly in other scenes belonging
to the same context (e.g., a different office or class-
room). In this way, our method is more flexible than
the current state-of-the-art approaches found in the lit-
erature (Fang et al., 2016; Wang and Xu, 2016; Li
Colque, R., Caetano, C., Melo, V., Chavez, G. and Schwartz, W.
Novel Anomalous Event Detection based on Human-object Interactions.
DOI: 10.5220/0006615202930300
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
293-300
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
293

et al., 2016; Feng et al., 2016), which are tied to a
single camera view. To be able to perform anomaly
detection in multiple scenes within a given context,
our proposed approach considers higher level seman-
tic information based on human-object interactions to
learn normal patterns.
Different from the current approaches that learn
normal patterns based on spatiotemporal information,
we learn such patterns using human-object interac-
tions. Based on such interactions, we consider two
strategies for anomaly detection: i) unrecognized in-
teractions; and ii) incorrect sequence of interactions.
While the former focuses on finding interactions that
did not occur during the learning stage, the latter ver-
ifies whether the interactions occur in the same se-
quence as in the learning stage, otherwise they are
considered as anomalies.
The main contribution of this work is a new model
for anomaly representation based in human-object in-
teractions. Our model differs significantly from the
state-of-the-art approaches in how it collects the scene
information. While the current models use a specific
view, our model learns patterns from a scene and is
able to detect anomalies in a distinct scene.
2 RELATED WORKS
A common category of the anomaly detection meth-
ods found in the literature addresses the problem by
learning activity patterns from low level handcrafted
visual features. In (Yu, 2014) a new feature is pro-
posed named Mixture of Kernel Dynamic Texture
(MKDT) based on (Doretto et al., 2003), a statistical
model that transforms the video sequence to represent
the appearance and dynamics of the video. Inspired
by the classic HOF feature descriptor, a spatiotem-
poral feature based on both orientation and velocity
was proposed in (Mora-Colque et al., 2017), which
captures information from cuboids (regions with spa-
tial and temporal support). In (Bera et al., 2016), the
authors restricted their work to trajectory-level behav-
iors or movement features per agents, including cur-
rent position, average velocity (including speed and
direction), cluster flow, and the intermediate goal po-
sition. However, as mentioned in (Sabokrou et al.,
2017), hand-crafted features cannot represent video
events very well. Thus, our model does not use low
level features as main characteristics.
Online anomaly detection is another category
found in the literature. In (Javan Roshtkhari and
Levine, 2013), the authors proposed an online unsu-
pervised method, based on spatiotemporal video vol-
ume construction, using both local and global com-
positional information using dense sampling at var-
ious spatial and temporal scales. According to (Xu
et al., 2013), the aforementioned methods model ac-
tivity patterns only considering local or global con-
text, leading to a lack of global or local information
of abnormal motion pattern. In view of that, in (Xu
et al., 2013) a hierarchical framework was proposed
that considers both global and local spatiotemporal
contexts. In (Cheng et al., 2015) was also proposed
a unified framework to detect both local and global
anomalies using a sparse set of STIPs. The majority
of these models are based on low level features, con-
sequently with the same advantages and drawbacks.
Recently, a growing trend is the employment of
deep neural networks (DNNs). The authors in (Xu
et al., 2015) proposed a novel Appearance and Mo-
tion Deep-Net (AMDN) framework for discovering
anomalous activities. Instead of using handcrafted
features, they learned discriminative feature represen-
tations of both appearance and motion patterns in a
fully unsupervised manner. Still image patches and
dynamic motion fields represented with optical flow
are used as input of two separate networks, to learn
appearance and motion features, respectively. After,
early fusion is performed by combining pixels with
their corresponding optical flow to learn a joint repre-
sentation. Finally, a late fusion strategy is introduced
to combine the anomaly scores predicted by multiple
one-class SVM classifiers. Inspired in the same ar-
chitecture, an incremental model based in Deep rep-
resentation of texture and motion was proposed in (Xu
et al., 2017). A spatiotemporal CNN model was de-
veloped by (Zhou et al., 2016), which accesses the ap-
pearance information and motion extracted from con-
tinuous frames. To capture anomalous events appear-
ing in a small part of the frame.
To take advantage of the best of the two worlds
(handcrafted and deep features), Hasan et al. (Hasan
et al., 2016) used an autoencoder, based on the
two types of features, to learn regularity in video
sequences. According to the authors, the autoen-
coder can model the complex distribution of the reg-
ular dynamics of appearance changes. The authors
in (Ribeiro et al., 2017) proposed a model that col-
lects appearance and motion information, used to feed
a Convolutional Auto-Encoder (CAE). The model is
trained with normal situations uses a regularized re-
construction error (RRE) to recognize normal and ab-
normal events. These models focus on a specific cam-
era view, therefore the information used for recogniz-
ing anomalies is highly correlated to the view. On the
other hand, our model tries to be able to handle dif-
ferent views, only maintaining the same context.
The aforementioned methods perform single cam-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
294

era view analysis, i.e., they use only one camera view
to train and test. In contrast, the authors of (Loy,
2010) proposed a model based in pair wise analysis
for disjoint cameras. In our study, we use contextual
information to determine possible anomalous event,
however using not only disjoint cameras but also dif-
ferent camera views and distinct environments.
3 PROPOSED APPROACH
Before presenting the proposed approach, two impor-
tant aspects must be discussed: the definition used for
anomalous patterns and the types of anomalies our ap-
proach intends to detect. In this work, we use the fol-
lowing premise: “if something has not happened be-
fore, it will be considered as an anomalous pattern”.
Hence, any pattern that differs significantly from ob-
served patterns during the training stage should be
labeled as anomalous. It is important to emphasize
that such premise is very common and used on other
anomaly detection methods in the literature. Regard-
ing the types of anomaly, our model is oriented to
detect anomalies in different environments, implying
that typical information employed for anomaly detec-
tion (e.g., velocity and orientation captured through
optical flow), cannot be used due to the change of
camera position. To overcome such problem, our ap-
proach describes the scene as a set of interactions be-
tween persons and objects.
Our approach is divided in two main steps:
anomaly representation and anomalous pattern de-
tection. In the first step, a preprocessing stage al-
lows our model to describe the sequence creating
structures that represent interactions. Basically, the
idea is to collect these interactions as patterns belong-
ing to a certain person. In the second step, the ex-
tracted patterns are compared to detect whether some
of them may be considered as anomalous. In the
first phase, all subjects contribute by creating a set
of patterns with their performed interactions. In the
second phase, patterns found in training are used to
detect whether someone is performing any anomaly.
Thus, we can detect and locate which person in a spe-
cific frame is performing a strange or unknown activ-
ity. Here, it is important to highlight that video se-
quences belonging to training set are totally different
from testing sequences. However, all of them have
the particularity of being or having the same context.
3.1 Anomaly Representation
To describe the scene, our model is based on a human-
object interaction representation. Therefore, we must
define the scene actors and how they interact to each
other. First, our model detects people and objects
present in the scene using the model proposed in (Liu
et al., 2015). Then, to determine which objects are
interacting with a person, we employ a human pose
estimation approach (Eichner et al., 2012) to locate
the person’s hands and to link the objects with people.
Finally, we estimate people’s trajectories path (track-
lets) using a tracking algorithm based on Kalman fil-
ter
1
.
Before describing the sequence in a set of struc-
tures, our model defines the interactions and track-
lets. The first step consists on linking each person
with objects. This is a challenging task, especially
when depth information is not present. The proposed
model uses a straightforward heuristic to link human
and objects by employing the position of the hands to
determine the distance between objects and the per-
son. After each subject in the scene is linked with
the interacted objects, the next step consists on track-
ing the person. Note that, on the first step, we can
only determine unrecognized objects and, in the sec-
ond step, the tracking allows our model to create a
temporal representation that aims at finding unrecog-
nized sequence interactions.
Similar to a graph, we employ a structure that rep-
resents the object interactions of a certain person in
a particular frame by connecting them with edges,
which we called kernel. Here, each interaction may be
represented by a label meaning the set of objects that
this specific interaction contains. Thus, we can see
the tracklet representation as a list of kernels formed
by square and circle nodes. Square nodes represent
the person belonging to the tracklet, and circle nodes
represent the objects that have been linked with such
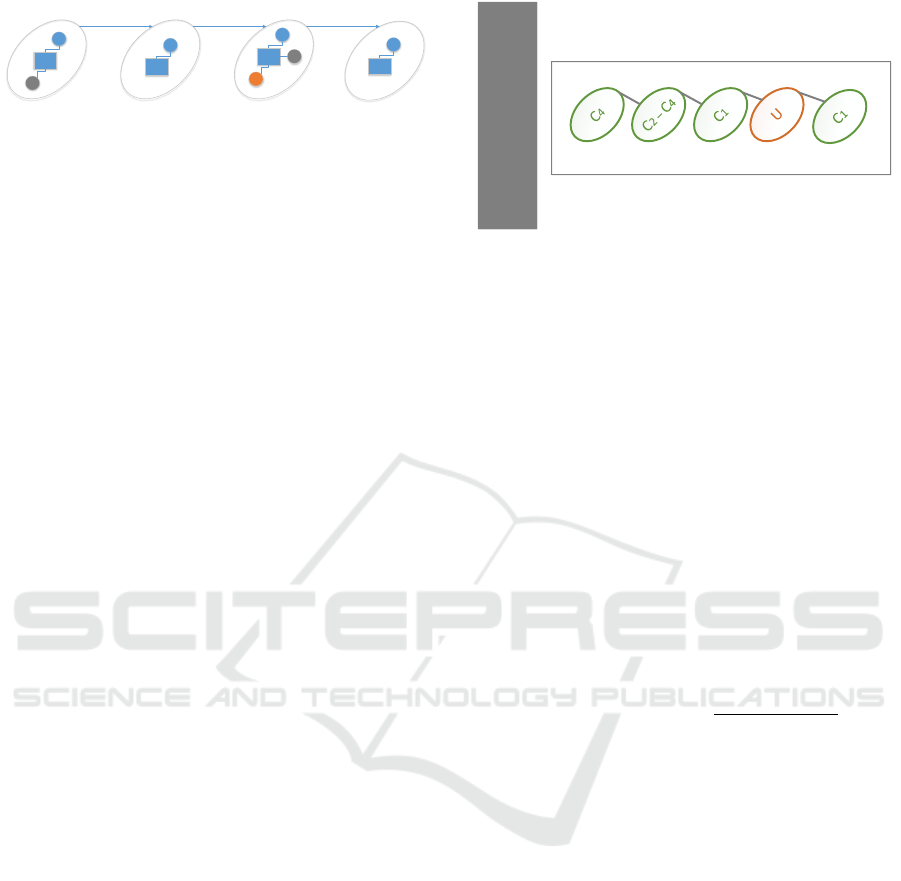
person. Figure 1 illustrates the representation. Note
that objects may appear many times. This is done by
a unique interaction label composed by the sorted ob-
ject identifiers.
A set of labels that represent the kernels are col-
lected. These labels are used to built a “dictionary”,
where each word represents a specific interaction be-
tween a person and one or more objects. For instance,
interaction with the object C introduces the word “C ”
to the dictionary. In Figure 1, we can list the words
C
1
, C
1
−C
2
, and C
1
−C
2
−C
3
. This dictionary saves
the knowledge regarding normal interactions between
humans and objects that have been observed during
the training stage.
1
Since the main goal of this work is to detect anomalies
exploiting a graph-based approach, we do not focus deeply
on the preprocessing steps (i.e., detection and tracking).
Novel Anomalous Event Detection based on Human-object Interactions
295
Frame
i-1
Frame
i
Frame
i+1
Frame
i+2
C1 - C2
C1
C1 - C2 - C3 C1
Figure 1: Interaction representation from a person tracklet.
Squares represent the person at a specific frame and circles
the linked objects, where different colors indicate different
objects. For instance, in frame i − 1, the blue square repre-
sents the person and the circles in blue and gray represent
two different objects. The interaction with these objects cre-
ates the kernel called C
1
−C
2
. In next frame, i, the actor in-
teracts with a single object C
1
, generating the kernel named
C
1
.
3.2 Anomalous Pattern Detection
Given the interaction structures, the following step
is to detect anomalous patterns on the testing phase.
At this stage, our model pursues two different strate-
gies: (i) unrecognized interactions; and (ii) correct
sequence interaction. The goal of these strategies is
to recognize anomaly types according to the learned
context information.
3.2.1 Unrecognized Interactions
In our model, this strategy represents the first level
of anomaly detection, we can see it as an atomic
anomaly detection. The idea is quite simple: during
the training phase a list of interactions is built, then,
whether an interaction is not present in this list, such
node is marked as anomalous. This strategy intends
to recognize when an object, or a set of objects, is
present in the test but was not present in the train-
ing phase. For instance, during the training phase no-
body interacted with the fire extinguisher in a com-
puter laboratory, however, if such interaction occurs
in the testing phase, this would represent an anoma-
lous event. Figure 2 illustrates an unrecognized in-
teraction, where the object U was not seen during the
training phase, therefore it is not in the dictionary, in-
dicating an unrecognized interaction.
3.2.2 Correct Sequence Interaction
Inspired by (Crispim et al., 2016), our second model
strategy explores statistical information of sequence
interactions. The idea is to detect some events ac-
cording their occurrence probability, in which low
probabilities indicate anomalous events. Thus, our
model collects interaction information from kernel
structures. Such information is saved in two hash ta-
bles, one of them used to count the number of oc-
currences for a specific word and a second used to
Dictionary
C1
C2
C3
C4
C5
C6
.
.
.
Cn
Frame
i-2
Frame
i-1
Frame
i
Frame
i+1
Frame
i+2
Figure 2: Example of unrecognized interaction. Frame i +1
illustrates the interaction with an unknown object.
count pairs of consecutive interactions. For instance,
in Figure 1, we have two occurrences of word C
1
, and
one occurrence of words C
1
− C
2
and C
1
− C
2
− C
3
.
At same time, we have the following occurrence se-
quences: {(C
1
−C
2
| C
1
), (C
1
| C
1
−C
2
−C
3
), (C
1
−
C
2
−C
3
| C
1
)}.
Widely applied in modeling language, N-Grams
utilizes the assumption that the probability of a word
depends only on the previous words, this assumption
is called Markov assumption. Markov models are the
class of probabilistic models that assume we can pre-
dict the probability of some future unit without look-
ing too far into the past (Jurafsky and Martin, 2009).
Our model use N-grams to compute the probability
of a specific sequence using maximum likelihood as
following equation
P(w
i
|w
1
,w
2
...w
i−1
) ≈
count(w
i−1
,w
i
)
count(w
i−1
)
(1)
where, each word w
i
is represented by a kernel label,
i.e., the object set that interacts with the person in a
specific frame. This information is found in hash ta-
bles built from interaction sequences. Finally, if the
probability P(w
i
|w
i−1
) is less than a threshold η (0.6
in our experiments), then such interaction and conse-
quently the observed tracklet is marked as anomalous.
Figure 3 presents a brief example of correct se-
quence interaction. In this case, the anomaly is given
by the low probability of happening a specific se-
quence. In particular, the probability (Equation 1) in
frame i is smaller than η = 0.6, therefore, we detect
the entire tracklet as anomalous.
4 EXPERIMENTAL RESULTS
This section reports our results and is divided in two
parts: (i) tests based on unrecognized interactions;
and (ii) test based in anomaly sequence interactions.
We use the same set of videos for training both parts.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
296

C1-C1 10
C1-C2 1
.
C2-C3 7
C2-C5 15
.
.
Cn-C1 3
Cn-C4 2
.
Word
Frequency
Pair
Frequency
C1 60
C2 50
C3 26
C4 35
C5 32
C6 2
.
.
.
Cn 6
C1
C2
C3
C4
C5
C6
.
.
.
Cn
C1-C1
C1-C2
.
C2-C3
C2-C5
.
.
Cn-C1
Cn-C4
.
Frame
i-1
Frame
i
Frame
i+1
P=1/60
Figure 3: Example of incorrect sequence interaction. The
probability in frame i is 1/60, which would be considered
anomalous for a threshold equals to η = 0.6.
Dataset. Our dataset was built by different views cap-
tured on different laboratories. We created a set of
training videos to represent common situations, in-
cluding: people interacting with chairs, laptops, back-
packs and monitors. The dataset is divided in training
and testing video sequences. The ground-truth was
composed by every situation that was not present in
the training videos. It is important to highlight the
diversity not only on camera view but also in environ-
ments. Our dataset contains clips with different places
and views for the same context which is a computer
laboratory. For instance, various video sequences are
recorded with different camera position in the room
2
.
Our proposed dataset is composed of everyday
laboratory work activities. For instance, students sit-
ting and working in their computers, people entering
and passing in front of the camera. Duration of the
videos does not exceed five minutes of recording. It
is composed by 11 clips for testing and 20 for train-
ing. As anomaly samples, we consider all interactions
that a person perform with a coffee machine or a pil-
low (both interactions did not take place during train-
ing). We also consider anomalous sequences, the ab-
normal cases where a person interacted with the cam-
era before the backpack, since in training videos peo-
ple who interacted with the camera always did it with
the backpack first.
Output and Settings for Test Model. In the first
stage, our model detects actors and human poses. In
this case we use default CNN settings and precom-
puted models provided by (Liu et al., 2015) and (Eich-
ner et al., 2012). In the second stage, we have two
variables: (i) tracklet building variable δ
1
= 50; and
(ii) Jaccard index j = 0.7. The tracklet building vari-
2
This novel dataset will be made publicly available after
the acceptance of this paper.
able is a threshold value that bounds the distance be-
tween tracklets and people occurrence. Thus, for each
frame, bounding boxes are linked to a specific track-
let if the distance is smaller than this referred value
(δ
1
). The Jaccard index is a complement to our track-
ing model since in some cases the bounding boxes of
certain person may vary by its pose, for instance, if
a person stretches his/her arms the related bounding
box will grow and only a distance threshold may give
a wrong answer. In view of that, we use an occu-
pation criteria based in overlapping areas considering
the Jaccard index. To build the interaction representa-
tion for a particular tracklet, we consider a threshold
δ
2
= 100 to link objects with a person tracklet. Both
δ
1
and δ
2
are measured in pixels.
During the test, the interaction structure is labeled
as abnormal when an anomaly is detected by a of the
proposed strategies. Finally, we join the anomalous
events into anomaly intervals belonging to a determi-
nate subject (tracklet). It allows us to determine which
subject performed the anomaly and at what specific
frame.
To evaluate the detection results, we use the metric
proposed in (Cao et al., 2010). Ground truth anoma-
lies are denoted by Q
g
= {Q
g
1
,Q
g
2
,...,Q
g
m
} and the
output results are denoted by Q
d
= {Q
d
1
,Q
d
2
,...,Q
d
n
}.
Function HG(Q
g
i
) denotes whether a ground truth
interval Q
g
i
is detected. Function T D(Q
d
j
) denotes
whether a detected interval Q
d
j
makes sense or not.
HG(Q
g
i
) and T D(Q
d
j
) are judged by checking whether
Jaccard index is above a threshold th (0.30 in our ex-
periments), according to
HG(Q
g
i
) =
(
1, if ∃ Q
d
k
, s.t.
Q
d
k
∩Q
g
i
Q
g
i
> th
0, otherwise
T D(Q
d
j
) =
1, if ∃ Q
g
k
, s.t.
Q
g
k
∩Q
d
j
Q
d
j
> th
0, otherwise
Based on the previous equations, we then compute
precision and recall metrics, defined as
Precision =
∑
m
i=1
HG(Q
g
i
)
m
,
Recall =
∑
n
j=1
T D(Q
d
j
)
n
.
4.1 Unrecognized Interactions
These experiments are oriented to determine anoma-
lies evolving unrecognized objects. For instance, a
pillow and a coffee maker usually are not in common
computer laboratory and, although these objects are
not dangerous or suspicious we take in account our
premise that something that not appeared during the
training will be considered as abnormal.
Novel Anomalous Event Detection based on Human-object Interactions
297

Table 1 presents the results of such experiments.
Precision and recall values are presented as tuple
(P/R). We can see that the result of the tests related
to the detection of anomalies due to unknown inter-
actions presented positive results in the first level of
detection. Moreover, this strategy was satisfactory to
detect anomalous sequences. However, tests 3 and 4
presented a lower value of precision and recall than
expected for both methods.
The reason for the low accuracy in test 3 is that
we do not have a sense of depth in the image analysis.
In view of that, a person with the hands far from an
object in the depth can be considered as an interac-
tion. The low recall in test 4 occurs because the pose
estimator sometimes fails to detect the coordinates of
the person hands. Thereby, the distance between the
hands of the actor and the objects exceeds the limit to
define an interaction, turning it difficult to detect the
anomalies.
Table 1: Precision and Recall (P/R) results for our dataset.
Strategy 1 Strategy 2
Test 1 1/1 0/0
Test 2 1/0.5 1/0.5
Test 3 0.25/0 0.25/0.1
Test 4 1/0.11 1/0.07
The idea of this experiment is to show that our
model may recognize an anomalous situations given
by a previously unknown interaction. We can sup-
pose that such binary problem is easy to solve when
we talk about only objects that do not appear during
the training. However, it is more than only unrecog-
nized objects since we are also looking for unknown
interactions. Thus, during the training phase, interac-
tions contain no more than three specific objects and
in testing phase there are interactions with these spe-
cific objects and another that is not usually seen but
appears in training phase.
For instance, interactions with laptops, chairs,
notebooks and backpacks are common in computer
laboratories, nonetheless, some combinations like
computer and coffee cup may result abnormal, since
in our premise if it not happened in training it will
be anomaly in testing. Based on this, maybe there is
no allowed drink in the laboratory area, however, in-
side the environment there is a specific coffee area.
Another goal of this experiment is to determine in-
teractions with unrecognized objects (e.g, abnormal
objects, such as people interacting with weapons may
be considered an abnormal situation in a laboratory).
Figure 4 shows simple examples of our model
when an anomaly is detected. Subjects and objects are
marked by blue and green bounding boxes, respec-
tively. The hand positions are marked as pink circles.
4.2 Correct Sequence Interactions
Here, our main goal is to collect the temporal infor-
mation about the relations in interaction structures. In
this experiments the goal is to discover sequences that
have not been seen before (e.g., to enter a bank office
you first need to pass through a metal detector secu-
rity door). In this stage, we create a synthetic situ-
ation where a video camera is placed in a particular
location. Such events happened sometimes in train-
ing phase and the test case is when the device is re-
moved. The results for this experiment are presented
in Table 2. As it was expected, N-grams (Strategy 2)
achieved the best results on determining anomaly se-
quences.
Table 2: Precision and Recall (P/R) results of our dataset.
Strategy 1 Strategy 2
Test 5 0/0 1/0.5
Test 6 0/0.5 0.5/0.5
Test 7 1/0.5 1/1
Test 8 0/0 1/0.33
Test 9 0/0 1/0.5
Test 10 0/0 1/1
Test 11 0/0 1/0.5
Figure 5 shows simple examples of our model
when an sequence interaction anomaly is detected.
Subjects and objects are marked by blue and green
bounding boxes, respectively. The hand positions are
marked as pink circles. In these sequences, the con-
text is that nobody took the camera placed in top of
the locker, however during the train the student place
the camera in this position.
4.3 Discussion
In this section, we discuss important aspects regard-
ing the proposed method.
Dependency on the low level tasks: It is important
to highlight that our goal is to introduce a new model
to recognize and detect anomalies, instead of using
only a specific environment, our proposed model at-
tempts to learn context based on human-object inter-
actions. We deal with some artifacts and mistakes due
to the object detector, tracking and pose recognition
approaches that could be overcome by employing bet-
ter approaches to generate tracklets.
Human-object interaction recognition: According
to experimental results, it was clear that using only
euclidean distance to link humans and objects is not
the best possible strategy. One possible improvement
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
298

(a) (b)
Figure 4: Sample outputs of the model. In this images unrecognized objects as: pillow and coffee maker machine was not
seen in training phase. Blue bounding box correspond to a person, green for objects. Hands are marked with pink points.
(c) (d)
Figure 5: Example of unknown sequences of interactions. The student removes camera, this action was no presented in
training phase.
would be to use depth information to improve the link
between humans and objects. However, we did not
include depth information since surveillance systems
generally use single camera for certain environments
(turning it impossible to estimate depth).
Testing with other datasets: In literature we find
several well-known datasets for anomalous event de-
tection problem. However, such datasets are pretty
specific for crowds with low resolution. Nonetheless,
our model is based on human-object interactions and,
in most cases of the aforementioned datasets, this type
of relations are not clear given the clarity of the video
sequences.
Comparisons with other approaches: As our
model does not have representative results in other
datasets, literature algorithms would not work prop-
erly in our proposed dataset due to the type of rep-
resentations learned by them (characteristics such as
speed, orientation, trajectories, appearance, textures).
These types of features change significantly from
scene to scene, not being representative when the en-
vironment changes.
Experimental Validation: In our experiments, we
present artificial situations that could be serve as
many other. Since anomalies can be seen as particular
situations for a certain environment, our experiments
focused on presenting the essence of our model.
5 CONCLUSIONS
In this paper, we proposed an approach for anomaly
detection and localization based in context informa-
tion. Instead of using common information, such
as texture, magnitude or orientation, we proposed a
model based in human-object interactions. An impor-
tant contribution of this study is the different perspec-
tive about the information collecting and the anomaly
representation. Our model was capable of detect-
ing anomalies and to determine which individual per-
forms an anomalous activity. As future works, we in-
tend to focus on solving the weakness of our model
presented in experiments section, such as human-
object interaction in video sequences.
ACKNOWLEDGMENTS
The authors would like to thank the Brazilian National
Research Council – CNPq (Grant #311053/2016-5),
Novel Anomalous Event Detection based on Human-object Interactions
299

the Minas Gerais Research Foundation – FAPEMIG
(Grants APQ-00567-14 and PPM-00540-17) and the
Coordination for the Improvement of Higher Educa-
tion Personnel – CAPES (DeepEyes Project).
REFERENCES
Bera, A., Kim, S., and Manocha, D. (2016). Realtime
anomaly detection using trajectory-level crowd behav-
ior learning. In CVPRW.
Cao, L., Tian, Y., Liu, Z., Yao, B., Zhang, Z., and Huang,
T. S. (2010). Action detection using multiple spatial-
temporal interest point features. Multimedia and Expo
(ICME), 2010 IEEE International Conference on.
Cheng, K.-W., Chen, Y.-T., and Fang, W.-H. (2015). Video
anomaly detection and localization using hierarchi-
cal feature representation and gaussian process regres-
sion. In CVPR.
Colque, R. V. H. M., Junior, C. A. C., and Schwartz, W. R.
(2015). Histograms of optical flow orientation and
magnitude to detect anomalous events in videos. In
SIBGRAPI.
Crispim, C. F., Koperski, M., Cosar, S., and Bremond, F.
(2016). Semi-supervised understanding of complex
activities from temporal concepts. In AVSS.
Doretto, G., Chiuso, A., Wu, Y. N., and Soatto, S. (2003).
Dynamic textures. International Journal of Computer
Vision.
Eichner, M., Marin-Jimenez, M., Zisserman, A., and Fer-
rari, V. (2012). 2D articulated human pose estimation
and retrieval in (almost) unconstrained still images.
International Journal of Computer Vision.
Fang, Z., Fei, F., Fang, Y., Lee, C., Xiong, N., Shu, L.,
and Chen, S. (2016). Abnormal event detection in
crowded scenes based on deep learning. Multimedia
Tools and Applications.
Feng, Y., Yuan, Y., and Lu, X. (2016). Deep Representation
for Abnormal Event Detection in Crowded Scenes.
Proceedings of the 2016 ACM on Multimedia Confer-
ence.
Hasan, M., Choi, J., Neumann, J., Roy-Chowdhury, A. K.,
and Davis, L. S. (2016). Learning Temporal Regular-
ity in Video Sequences. In CVPR.
Javan Roshtkhari, M. and Levine, M. D. (2013). An on-line,
real-time learning method for detecting anomalies in
videos using spatio-temporal compositions. Comput.
Vis. Image Underst.
Jurafsky, D. and Martin, J. H. (2009). Speech and Language
Processing (2Nd Edition). Prentice-Hall, Inc.
Leyva, R., Sanchez, V., and Li, C. T. (2017). Video anomaly
detection with compact feature sets for online perfor-
mance. IEEE Transactions on Image Processing.
Li, F., Yang, W., and Liao, Q. (2016). An efficient anomaly
detection approach in surveillance video based on ori-
ented GMM. In ICASSP.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2015). SSD: Single shot
multibox detector. arXiv preprint arXiv:1512.02325.
Loy, C. C. (2010). Activity Understanding and Unusual
Event Detection in Surveillance Videos. Queen Mary
University of London.
Mora-Colque, R. V. H., Caetano, C., de Andrade, M. T. L.,
and Schwartz, W. R. (2017). Histograms of optical
flow orientation and magnitude and entropy to detect
anomalous events in videos. IEEE Trans. Circuits
Syst. Video Techn.
Ribeiro, M., Lazzaretti, A. E., and Lopes, H. S. (2017).
A study of deep convolutional auto-encoders for
anomaly detection in videos. Pattern Recognition Let-
ters.
Sabokrou, M., Fayyaz, M., Fathy, M., and Klette, R. (2017).
Deep-cascade: Cascading 3d deep neural networks for
fast anomaly detection and localization in crowded
scenes. IEEE Transactions on Image Processing,
pages 1992–2004.
Wang, J. and Xu, Z. (2016). Spatio-temporal texture mod-
elling for real-time crowd anomaly detection. Com-
puter Vision and Image Understanding.
Xu, D., Ricci, E., Yan, Y., Song, J., and Sebe, N. (2015).
Learning deep representations of appearance and mo-
tion for anomalous event detection. In British Ma-
chine Vision Conference (BMVC).
Xu, D., Ricci, E., Yan, Y., Song, J., and Sebe, N. (2017).
Detecting anomalous events in videos by learning
deep representations of appearance and motion. Com-
put. Vis. Image Underst.
Xu, D., Wu, X., Song, D., Li, N., and Chen, Y.-L. (2013).
Hierarchical activity discovery within spatio-temporal
context for video anomaly detection. In International
Conference on Image Processing (ICIP).
Yu, S. D. X. W. X. (2014). Crowded abnormal detec-
tion based on mixture of kernel dynamic texture. In
ICALIP.
Zhou, S., Shen, W., Zeng, D., Fang, M., Wei, Y., and
Zhang, Z. (2016). Spatial-temporal convolutional neu-
ral networks for anomaly detection and localization in
crowded scenes. Signal Processing: Image Commu-
nication.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
300
