
An Approach for Skeleton Fitting in Long-Wavelength Infrared Images
First Results for a Robust Head Localisation using Probability Masks
Julia Richter, Christian Wiede and Gangolf Hirtz
Department of Electrical Engineering and Information Technology,
Technische Universit
¨
at Chemnitz, Reichenhainer Str. 70, 09126 Chemnitz, Germany
Keywords:
Human Skeleton Extraction, Thermal Imaging, Head Localisation.
Abstract:
Human skeleton extraction has become a key instrument for motion analysis in the fields of surveillance,
entertainment and medical diagnostics. While a vast amount of research has been carried out on skeleton
extraction using RGB and depth images, far too little attention has been paid to extraction methods using
long-wavelength infrared images. This paper provides an overview about existing approaches and explores
their limitations. So far, extant studies have exploited thermal data only for silhouette generation as a pre-
processing step. Moreover, they make strong assumptions, such as T-pose initialization. On this basis, we are
developing an algorithm to fit the joints of a skeleton model into thermal images without such restrictions. We
propose to find the head location as an initial step by using probability masks. These masks are designed to
allow a robust head localisation in unrestricted settings. For the future algorithm design, we plan to localise the
remaining skeleton joints by means of geometrical constraints. At this point, we will also consider sequences
where persons wear thick clothes, which is aggravating the extraction procedure. This paper presents the
current state of this project and outlines further approaches that have to be investigated to extract the complete
skeleton.
1 INTRODUCTION
The observation of humans plays a pivotal role in sur-
veillance, entertainment and medical diagnostics. A
fundamental feature for such observations is the hu-
man skeleton, because it is a unique description of the
human body. Therefore, it has been used in a variety
of extant research, especially for human activity re-
cognition (Yao et al., 2011), (Wang et al., 2015) and
motion analysis (Huang et al., 2013), (Su et al., 2014),
(Khan et al., 2014).
Humans are warm-blooded beings, which means
they try to maintain a constant body temperature.
Long-wavelength infrared (LWIR) thermography al-
lows the measurement of the radiating energy relea-
sed from the human body. This information can con-
tribute to the localisation of human skeleton joints. In
our work, we used a sensor with a spectral range of
7.5 to 13 micrometers. Compared to RGB and mo-
nochrome cameras, thermal cameras have the gene-
ral advantage that they can sense infrared radiation
emitted from humans. However, reflections, emis-
sions due to sun illumination, non-human warm ob-
jects, environmental influences, individually varying
differences, and non-homogeneously heat distributi-
ons over the body, e. g. caused by clothes, can cause
problems.
To date, very few studies have investigated ske-
leton fitting in LWIR images. This paper explores
the limitations of existing research and introduces a
method that aims at fitting human skeletons in un-
constrained 2-D LWIR images. This study makes a
major contribution to research on skeleton fitting by
demonstrating the exploitation of the measured sur-
face temperatures. Furthermore, this is the first study
in the field of skeleton fitting by means of LWIR ima-
ges that undertakes a quantitative accuracy evaluation.
Skeleton detection in LWIR images could contribute
in a variety of applications that are especially related
to medicine and sports diagnostics. As an example,
Richter et al. used thermal images to measure the skin
temperature of the biceps brachii during sports exerci-
ses (Richter et al., 2017). They mapped the skeleton
provided by a Kinect sensor to a thermal image. In
this way, they could automatically locate the muscle,
which was a manual or semi-manual procedure in pre-
vious work, e. g. (Formenti et al., 2013), (Neves et al.,
2014), (Bartuzi et al., 2012). To avoid the sensor ca-
libration, which was necessary for the mapping, the
skeleton could be extracted directly from the thermal
Richter, J., Wiede, C. and Hirtz, G.
An Approach for Skeleton Fitting in Long-Wavelength Infrared Images - First Results for a Robust Head Localisation using Probability Masks.
DOI: 10.5220/0006645103730379
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
373-379
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
373

image. Medical applications that could profit from
skeleton extraction are the automatic detection of in-
flammations and cancer, for instance.
While the first section of this paper already gave
an insight into advantages, disadvantages and se-
veral applications of LWIR thermography, the second
section examines extant work already carried out on
skeleton extraction and formulates the research gap.
Thereupon, Section 3 is concerned with the propo-
sed method and the current state of the algorithm.
Since the work is still in progress, we present the de-
tection of the head by means of probability masks.
Thereupon, Section 4 introduces the evaluation met-
hodology that we used to determine the performance
of the proposed method. In Section 5, the results are
presented and discussed while Section 6 closes the
paper by contemplating concepts and challenges con-
cerning further development steps for a final skeleton
extraction algorithm.
2 RELATED WORK
Our literature review focuses on research that is con-
cerned with general aspects and applications of hu-
man body segmentation in thermal images. Moreo-
ver, we devote further attention to skeleton fitting in
RGB images, because the existing concepts could be
applicable to thermal imaging as well.
Much of the research that was carried out
on detecting persons in thermal images utilised a
foreground-background segmentation in the first step.
Han et al. applied a Gaussian model to detect persons
in thermal images (Han and Bhanu, 2005). The the-
reby obtained silhouettes were used to calculate gait
energy images in order to recognise repetitive activi-
ties, i. e. walking patterns. Davis and Sharma used a
background subtraction as well (Davis and Sharma,
2004). At this point, they especially focused on clas-
sic problems involved with thermal imagery, e. g. halo
effects that cause inadequate results for commonly
used statistical background subtraction techniques. In
another work, which aimed at classifying sport types
performed in a gym, Gade et al. employed an automa-
tic threshold model to segment persons. These per-
sons were then represented by bounding boxes (Gade
and Moeslund, 2013). The bottom centres of these
boxes were converted to world coordinates by means
of a homography. The evaluation of resulting occu-
pancy patterns in the top view allowed the sport type
determination.
The previously mentioned approaches concentra-
ted on processing several persons’ silhouettes, i. e. the
whole body, rather than on segmenting and analysing
specific body parts. In contrast to that, numerous stu-
dies seeked to estimate the location of explicit body
parts in thermal data. While some of them were con-
cerned with the detection of only one part, such as the
face (Wong et al., 2012), (Buddharaju et al., 2006),
(Buddharaju et al., 2007), (Yu et al., 2010), a variety
of studies investigated the segmentation of the whole
body into refined parts. A rather coarse segmentation
was introduced by Pham et al. (Pham et al., 2007).
They introduced a 2-D human shape model consisting
of an ellipse (head) and two rectangles (torso, legs) to
detect if persons are lying down in a crowded area.
After a background subtraction, they generated head
hypotheses by using an elliptical template and by as-
suming that the highest gradients often occur around
exposed body parts, especially in the case of faces.
In addition to this, their algorithm detects the head-
shoulder part with a cascade of several cascade clas-
sifiers employing histograms of oriented gradients.
If the person was determined to be standing, the al-
gorithm segmented the silhouette into the remaining
parts. Hereby, the segmentation process was formula-
ted as a maximum posteriori problem. Bhanu et al. fit
a 3-D kinematic model with twelve parts to a 2-D sil-
houette that was calculated using a simple difference
between an image and a background image (Bhanu
and Han, 2002). For this fitting process, they presu-
med that the observed person is walking and viewed
from the side. Their algorithm requires that the hand
that is not facing the camera is periodically occluded
in the video. A threshold was used to segment the face
and the hands. They projected the 3-D model to the
2-D thermal image by means of camera parameters.
Subsequently, they obtained the optimally matching
3-D model by performing a least square fit that mini-
mises the difference between projected model and the
2-D silhouette.
Only few approaches, however, can be found so
far for skeleton joint fitting in almost unconstrained
settings. The approach that is the most similar with
regard to our aim is the work of Iwasawa et al. (Iwa-
sawa et al., 1997). They estimated ten joints in a se-
quence of thermal images. In a first step, they cal-
culated the silhouette by applying a threshold on the
image. Thereupon a distance transformed image was
determined from the silhouette. This was followed
by the determination of the center of gravity and of
the upper body orientation. Subsequently, significant
points were detected by a heuristic contour analysis
of the silhouette to find the head top, the hand and
foot tips as well as elbow and knee joints. In their
approach, a T-pose initialization is required. Moreo-
ver, the thermal image is used for silhouette genera-
tion only. The possibility to exploit thermal informa-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
374

tion for joint localisation was not taken advantage of.
Since a large number of studies investigating skele-
ton fitting in RGB images is based on silhouettes as
well, we briefly present common approaches at this
point. Similar to (Iwasawa et al., 1997), Vignola et
al. fitted a skeleton to silhouettes using distance trans-
form (Vignola et al., 2003). For evaluation, they cal-
culated the averaged joint-wise error to ground truth
2-D joint coordinates for scenarios with a different le-
vel of difficulty. Da et al. fitted ellipses to the up-
per body silhouette using contour curves (Da Xu and
Kemp, 2009). Ding et al. calculated skeleton joints
from critical points, which were determined by calcu-
lating the gradient of the distance transformed image
(Ding et al., 2010). Recently, a learning-based appro-
ach using convolutional neural networks was presen-
ted by Wei et al. (Wei et al., 2016).
The studies presented thus far mainly used ther-
mal images for segmenting persons from the back-
ground without performing a body part segmenta-
tion afterwards (Han and Bhanu, 2005), (Davis and
Sharma, 2004), (Gade and Moeslund, 2013). Those
studies that subsequently performed a body part seg-
mentation either
- used a coarse model (Pham et al., 2007) and do
not generate a refined model with skeleton joints,
- simplify the fitting process by making strong as-
sumptions, such as T-pose initialisation, thin clot-
hes and limited occlusions or
- are restricted to the processing of the obtained sil-
houette without further employing thermal infor-
mation (Iwasawa et al., 1997).
Except the studies that are connected to face de-
tection, the studies that come closest to our appro-
ach have not further exploited the available thermal
information. Moreover, the only study that generates
a refined model with specific joints (Iwasawa et al.,
1997) exploits the available thermal data only for fo-
reground segmentation. Furthermore, they do not pre-
sent a quantitative accuracy evaluation for all the lo-
calized joints.
For these reasons, our work that is still in progress
aims at fitting a refined skeleton model with 15 joints
to thermal image sequences without assuming a con-
strained setting. These 15 joints are illustrated in Fi-
gure 1. We thereby include thermal data in the fitting
process in order to take advantage of the thermal in-
formation. In this paper, we present the localisation
of the head, i. e. j
5
, by using probability masks.
3 METHOD
Although one might expect that the head can be ea-
sily localised in a thermal image because of the com-
paratively high temperature and the typical location,
there are a variety of challenging scenarios, which we
would like to address. These scenarios are:
- The person is bent forwards, so that only a part of
the face is visible and the head is surrounded by
other warm regions.
- The person is viewed from behind, so that no face
is visible.
- The person is viewed from the side, so that only a
part of the face is visible.
- The person raises the arms, so that they merge
their area with the face.
In this paper, we assume that only one person is pre-
sent in a recorded image sequence.
The algorithm for head localisation is presented in
the following sections. Figure 2 illustrates the over-
view of the algorithm.
3.1 Foreground Segmentation
We assume that the person is the warmest object in
the image. As a first step, temperatures lower than
60 % of the highest temperature were defined as back-
ground. After a linear auto contrast adjustment, the
person’s silhouette was extracted by using Otsu’s met-
hod (Otsu, 1979). For scenarios with thick clothes,
Otsu’s method was unsuitable to obtain a closed sil-
houette. Here, a segmentation algorithm that is based
on SLIC superpixels (Achanta et al., 2012) and DBS-
CAN clustering (Ester et al., 1996) would be more
appropriate.
j1
j3
j2
j4
j5
j6
j7
j8
j9
j10
j11
j12
j13
j14
j15
Figure 1: Skeleton model with fifteen joints.
An Approach for Skeleton Fitting in Long-Wavelength Infrared Images - First Results for a Robust Head Localisation using Probability
Masks
375
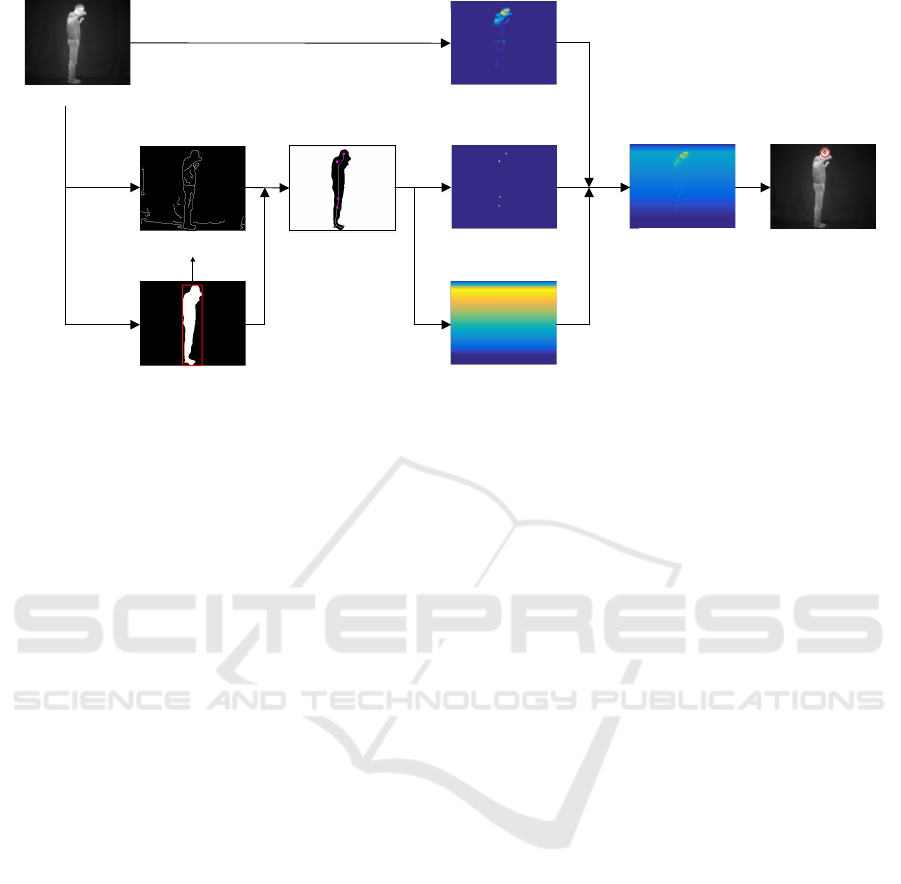
Input image
Foreground silhouette
Circle centres
Gradient image
Circle mask
Temperature mask
Position mask
Merged mask
Localised head
Figure 2: Overview of the proposed head localisation algorithm.
3.2 Mask Generation
Based on the input image and the segmented fore-
ground, probability masks were calculated that repre-
sent the probability of each pixel to be the head cen-
tre position. In the following, the calculation of these
masks and the final decision about the head location
are described.
3.2.1 Circle Mask
To obtain possible head locations, circles of an ap-
propriate head size were detected on the obtained fo-
reground image and on its gradient image by means
of the Canny Edge detector and Hough Transforma-
tion. Only circles with centres on the foreground were
selected for the further processing. All mask pixels
that exceed a fixed distance from these circle centres,
which was set to three pixels, were set to zero. We
choose a very small distance, because the circle cen-
tres are a very accurate indication for the head po-
sition. The remaining pixel values were then weig-
hted according to their proximity to the closest cen-
tre. In this way, pixels on a centre position obtained
the probability of one. Towards the edge of the cir-
cles, the probability linearly decreases towards zero.
In the current work, we use a fixed head size, which
should be adapted according to the size of the fore-
ground blob in future.
3.2.2 Temperature Mask
The head is assumed to have a relative high tempera-
ture. Therefore, the temperature values in the infrared
image can be used as a probability measure for possi-
ble head locations and to filter out improbable circle
centres from the previous step. To obtain the tempe-
rature mask, all temperature values lower than 80 %
of the maximum temperature were set to zero. Subse-
quently, a quadratic function was applied to map the
remaining values to a probability between zero and
one.
3.2.3 Position Mask
We introduced a further mask that is influenced by the
vertical position of the circle with the topmost posi-
tion in the image, because we assume the topmost cir-
cle more likely to be the head. The probability of each
image row linearly rises from zero to one while star-
ting from the first image row until the row of the top-
most circle. The probabilities of the following rows
are linearly decreasing again towards the last row.
3.2.4 Head Localisation on Merged Mask
In a final step, the masks were merged by an element-
wise addition to obtain an overall probability measure
for each pixel. The preliminary head position h
pre
was denoted as the pixel with the highest probability.
Since this position differed from the actual head in
several cases, we rather used the circle centre of the
closest circle h
cir
if the distance between h
pre
and h
cir
exceeded the radius of this circle.
3.2.5 Tracking
The obtained head position was tracked by using a
Kalman filter. The tracked head position will be the
input for the calculation of further joints.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
376
4 EVALUATION
METHODOLOGY
The following sections present the data and parame-
ters that were used to evaluate the head localisation.
4.1 Sensor
The employed sensor is a thermal camera of the type
FLIR A35sc. This camera measures long-wavelength
infrared emission with a spectral range of 7.5 to
13 µm. It provides a thermal sensitivity of 50 mK at
30
◦
C and has a spatial resolution of 320×256 pixel.
The measured temperature is encoded with 14 bit.
4.2 Ground Truth Data Acquisition
In order to acquire ground truth data, we recorded se-
quences with a frame rate of 30 frames per second
and manually labelled the joint positions in the ther-
mal images. The ground truth position of the head
was estimated to be the centre of the head. Overall,
we recorded nine probands of different sex, body size
and proportions and different hair styles ranging from
bald head to long hair. The persons were standing ap-
proximately three meter away from the camera. The
scenarios cover simple scenarios in T-poses and star-
like poses as well as complex scenarios as described
at the beginning of Section 3. Overall, 332 sample
images were used for this evaluation.
4.3 Evaluation Parameters
Vignola et al. (Vignola et al., 2003) calculated the
mean Euclidean distance between the labelled and the
determined joint positions and the standard deviation
to evaluate the accuracy of their algorithm. In this
way, information about the error direction is lost, ho-
wever. Therefore, in our work, the signed mean errors
e
x
and e
y
as well as the standard deviations σ
x
and σ
y
with respect to the x and y coordinates were calculated
for every joint in terms of pixels according to Equa-
tions 1 to 4. N denotes the number of tested images,
which was 332 in our experiments, n is the image in-
dex, (x
o,n
, y
o,n
) corresponds to the output coordinate
and (x
t,n
, y
t,n
) to the ground truth coordinate of one
joint. In this paper, we apply these equations for the
head joint only.
e
x
=
1
N
·
N
∑
n=1
(x
o,n
− x
t,n
) (1)
e
y
=
1
N
·
N
∑
n=1
(y
o,n
− y
t,n
) (2)
σ
x
=
s
1
N
·
N
∑
n=1
((x
o,n
− x
t,n
) − e
x
)
2
(3)
σ
y
=
s
1
N
·
N
∑
n=1
((y
o,n
− y
t,n
) − e
y
)
2
(4)
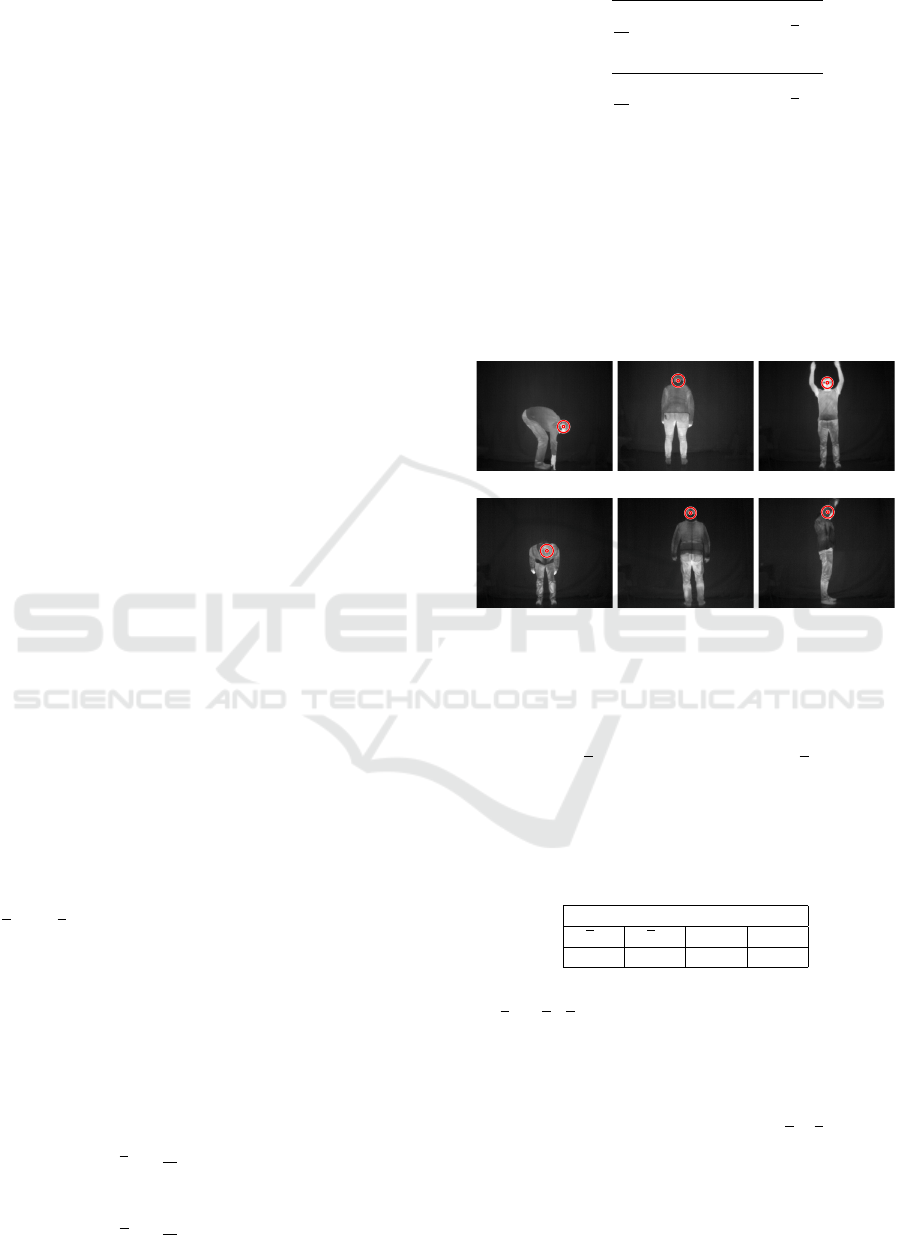
5 EXPERIMENTAL RESULTS
To illustrate the performance of the head localisation,
we run the algorithm on example scenarios that we
defined as challenging at the beginning of Section 3.
A selection of the results for these scenarios is shown
in Figure 3.
(a)
(b)
(c)
(d)
(e)
(f)
Figure 3: Example scenarios with persons viewed from the
side (a), (f), bent forwards (a), (b), viewed from behind (c),
(d) and with raised arms (e), (f).
The following table lists the signed mean error in
row direction e
y
and in column direction e
x
as well as
the standard deviation σ
y
and σ
x
in both directions.
Table 1: Signed mean errors in x and y direction and the cor-
responding standard deviation for the head joint. All num-
bers in pixels.
Head
e
x
e
y
σ
x
σ
y
-0.57 -1.57 3.23 5.01
To visualise these results, both the mean error vec-
tor e = (e
x
, e
y
) and the standard deviations σ
x
and σ
y
were plotted with respect to the labelled head joint
position as can be seen in Figure 4. For this visualisa-
tion, the labelled head position of one of the probands
standing in T-pose was selected.
The results show small values for
e
x
, e
y
and the
standard deviations σ
x
and σ
y
. That means that the
determined head position does not deviate much from
the labelled head position. This demonstrates the ro-
bustness of the head localisation even for challenging
scenarios. Nevertheless, there were certain scenarios
An Approach for Skeleton Fitting in Long-Wavelength Infrared Images - First Results for a Robust Head Localisation using Probability
Masks
377

Figure 4: Visualised results. The red dot indicates the label-
led joint position, the blue point the mean error with respect
to the labelled joint and the green lines the standard devia-
tions.
that still should be further considered: During our ex-
periments, we noticed that shirts with a round neck
can lead to the detection of additional circles, which
are lower than the actual head circle. Especially in
cases of uncovered necks, the higher temperature of
the neck leads to the selection of the lower circle. A
refinement of the head position by finding head sig-
natures that include the typical curvature around the
head could be a solution. Further incorrect detections
occurred when the person was viewed from behind
and the back showed a similar temperature than the
head itself. In such cases, detected circles on such re-
gions resulted in a higher probability than the detected
circle on the head.
6 FUTURE WORK
In future work we aim at localising the remaining
joints of the presented skeleton model on the basis
of the head joint position and geometrical constraints.
At this point, the centre of gravity (Iwasawa et al.,
1997) and the distribution of end points and branches
of the skeleton that was extracted by using bending
potential ratio (Shen et al., 2011) can be relevant geo-
metric clues to limit the search regions. Moreover, we
plan to extract meta information about a person, such
as the orientation with respect to the camera and whet-
her the person is bent, standing straight or sitting, for
example. Based on this meta information, different
algorithms with different skeleton configurations can
be used. Furthermore, the use of SLIC superpixels
and DBSCAN clustering has to be investigated with
regard to foreground extraction in cases of thick clot-
hes, which reduce the emitted infrared radiation. In
addition to this, the algorithm should be finally adap-
ted to detect more than one person in the image. Furt-
her research will also involve varying distances to the
camera, the occurrence of occlusions, reflections and
other warm objects.
In conclusion, we would like to stress that ske-
leton extraction in LWIR images will contribute in a
variety of applications. We intend, for instance, to
measure temperature changes of a selection of body
parts by means of the located skeleton joints. In this
way, the course of joint inflammations after an injury
could be diagnosed and the therapy could be adapted
accordingly. Besides this, further application fields,
such as security and surveillance, could benefit from
such kind of automatised temperature measurements.
ACKNOWLEDGEMENTS
This project is funded by the European Social Fund
(ESF). Moreover, we would like to thank all the per-
sons who participated during the recordings.
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
Susstrunk, S. (2012). SLIC Superpixels Compared to
State-of-the-Art Superpixel Methods. PAMI. Vol 34
No 116, pages 2274–2281.
Bartuzi, P., Roman-Liu, D., and Wi
´
sniewski, T. (2012). The
influence of fatigue on muscle temperature. Internati-
onal Journal of Occupational Safety and Ergonomics,
18(2):233–243.
Bhanu, B. and Han, J. (2002). Kinematic-based human mo-
tion analysis in infrared sequences. In Applications
of Computer Vision, 2002.(WACV 2002). Proceedings.
Sixth IEEE Workshop on, pages 208–212. IEEE.
Buddharaju, P., Pavlidis, I., and Tsiamyrtzis, P. (2006).
Pose-invariant physiological face recognition in the
thermal infrared spectrum. In 2006 Conference on
Computer Vision and Pattern Recognition Workshop
(CVPRW’06), pages 53–53. IEEE.
Buddharaju, P., Pavlidis, I. T., Tsiamyrtzis, P., and Baza-
kos, M. (2007). Physiology-based face recognition in
the thermal infrared spectrum. IEEE transactions on
pattern analysis and machine intelligence, 29(4):613–
626.
Da Xu, R. Y. and Kemp, M. (2009). Multiple curvature
based approach to human upper body parts detection
with connected ellipse model fine-tuning. In 2009
16th IEEE International Conference on Image Proces-
sing (ICIP), pages 2577–2580. IEEE.
Davis, J. W. and Sharma, V. (2004). Robust detection of
people in thermal imagery. In Pattern Recognition,
2004. ICPR 2004. Proceedings of the 17th Internatio-
nal Conference on, volume 4, pages 713–716. IEEE.
Ding, J., Wang, Y., and Yu, L. (2010). Extraction of human
body skeleton based on silhouette images. In Educa-
tion Technology and Computer Science (ETCS), 2010
Second International Workshop on, volume 1, pages
71–74. IEEE.
Ester, M., Kriegel, H.-P., Sander, J., and Xu, X. (1996).
A density-based algorithm for discovering clusters in
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
378

large spatial databases with noise. Second Internati-
onal Conference on Knowledge Discovery and Data
Mining (KDD-96), pages 226–231.
Formenti, D., Ludwig, N., Gargano, M., Gondola, M., Del-
lerma, N., Caumo, A., and Alberti, G. (2013). Ther-
mal imaging of exercise-associated skin temperature
changes in trained and untrained female subjects. An-
nals of biomedical engineering, 41(4):863–871.
Gade, R. and Moeslund, T. (2013). Sports type classifica-
tion using signature heatmaps. In Proceedings of the
IEEE Conference on Computer Vision and Pattern Re-
cognition Workshops, pages 999–1004.
Han, J. and Bhanu, B. (2005). Human activity recognition
in thermal infrared imagery. In 2005 IEEE Compu-
ter Society Conference on Computer Vision and Pat-
tern Recognition (CVPR’05)-Workshops, pages 17–
17. IEEE.
Huang, T.-C., Cheng, Y.-C., and Chiang, C.-C. (2013). Au-
tomatic Dancing Assessment Using Kinect. In Advan-
ces in Intelligent Systems and Applications-Volume 2,
pages 511–520. Springer.
Iwasawa, S., Ebihara, K., Ohya, J., and Morishima, S.
(1997). Real-time estimation of human body pos-
ture from monocular thermal images. In Computer
Vision and Pattern Recognition, 1997. Proceedings.,
1997 IEEE Computer Society Conference on, pages
15–20. IEEE.
Khan, N. M., Lin, S., Guan, L., and Guo, B. (2014). A
visual evaluation framework for in-home physical re-
habilitation. In Multimedia (ISM), 2014 IEEE Inter-
national Symposium on Multimedia, pages 237–240.
IEEE.
Neves, E. B., Vilac¸a-Alves, J., Krueger, E., and Reis, V. M.
(2014). Changes in skin temperature during muscular
work: a pilot study. Pan American Journal of Medical
Thermology, 1(1):11–15.
Otsu, N. (1979). A threshold selection method from gray-
level histograms. IEEE transactions on systems, man,
and cybernetics, 9(1):62–66.
Pham, Q.-C., Gond, L., Begard, J., Allezard, N., and Sayd,
P. (2007). Real-time posture analysis in a crowd
using thermal imaging. In 2007 IEEE Conference on
Computer Vision and Pattern Recognition, pages 1–8.
IEEE.
Richter, J., Wiede, C., Kaden, S., Weigert, M., and Hirtz, G.
(2017). Skin Temperature Measurement based on Hu-
man Skeleton Extraction and Infra-red Thermography
- An Application of Sensor Fusion Methods in the
Field of Physical Training. In Proceedings of the 12th
International Joint Conference on Computer Vision,
Imaging and Computer Graphics Theory and Applica-
tions - Volume 6: VISAPP, (VISIGRAPP 2017), pages
59–66.
Shen, W., Bai, X., Hu, R., Wang, H., and Latecki, L. J.
(2011). Skeleton growing and pruning with bending
potential ratio. Pattern Recognition, 44(2):196–209.
Su, C.-J., Chiang, C.-Y., and Huang, J.-Y. (2014). Kinect-
enabled home-based rehabilitation system using Dy-
namic Time Warping and fuzzy logic. Applied Soft
Computing, 22:652–666.
Vignola, J., Lalonde, J.-F., and Bergevin, R. (2003). Pro-
gressive human skeleton fitting. In Proceedings of the
16th Conference on Vision Interface, pages 35–42.
Wang, Y., Sun, S., and Ding, X. (2015). A self-adaptive
weighted affinity propagation clustering for key fra-
mes extraction on human action recognition. Journal
of Visual Communication and Image Representation,
33:193–202.
Wei, S.-E., Ramakrishna, V., Kanade, T., and Sheikh, Y.
(2016). Convolutional pose machines. arXiv preprint
arXiv:1602.00134.
Wong, W. K., Hui, J. H., Desa, J. B. M., Ishak, N. I. N. B.,
Sulaiman, A. B., and Nor, Y. B. M. (2012). Face de-
tection in thermal imaging using head curve geometry.
In Image and Signal Processing (CISP), 2012 5th In-
ternational Congress on, pages 881–884. IEEE.
Yao, A., Gall, J., Fanelli, G., and Van Gool, L. J. (2011).
Does Human Action Recognition Benefit from Pose
Estimation?. In BMVC, volume 3, page 6.
Yu, X., Chua, W. K., Dong, L., Hoe, K. E., and Li, L.
(2010). Head pose estimation in thermal images for
human and robot interaction. In Industrial Mechatro-
nics and Automation (ICIMA), 2010 2nd International
Conference on, volume 2, pages 698–701. IEEE.
An Approach for Skeleton Fitting in Long-Wavelength Infrared Images - First Results for a Robust Head Localisation using Probability
Masks
379
