Towards Spatio-temporal Face Alignment in Unconstrained Conditions
R. Belmonte
1,3
, N. Ihaddadene
1
, P. Tirilly
2
, M. Bilasco
3
and C. Djeraba
2
1
ISEN Lille, Yncr
´
ea Hauts-de-France, France
2
Univ. Lille, CNRS, Centrale Lille, IMT Lille Douai, UMR 9189 - CRIStAL,
Centre de Recherche en Informatique Signal et Automatique de Lille, F-59000 Lille, France
3
Univ. Lille, CNRS, Centrale Lille, UMR 9189 - CRIStAL,
Centre de Recherche en Informatique Signal et Automatique de Lille, F-59000 Lille, France
Keywords:
Face Alignment, Spatio-temporal Models, Landmark Localization, Video-based, Unconstrained Conditions.
Abstract:
Face alignment is an essential task for many applications. Its objective is to locate feature points on the face,
in order to identify its geometric structure. Under unconstrained conditions, the different variations that may
occur in the visual context, together with the instability of face detection, make it a difficult problem to solve.
While many methods have been proposed, their performances under these constraints are still not satisfactory.
In this article, we claim that face alignment should be studied using image sequences rather than still images,
as it has been done so far. We show the importance of taking into consideration the temporal information
under unconstrained conditions.
1 INTRODUCTION
The problem of face alignment, also called facial
landmark localization, has raised much interest and
experienced rapid progress in recent years (Jin and
Tan, 2016). Given the position and size of a face,
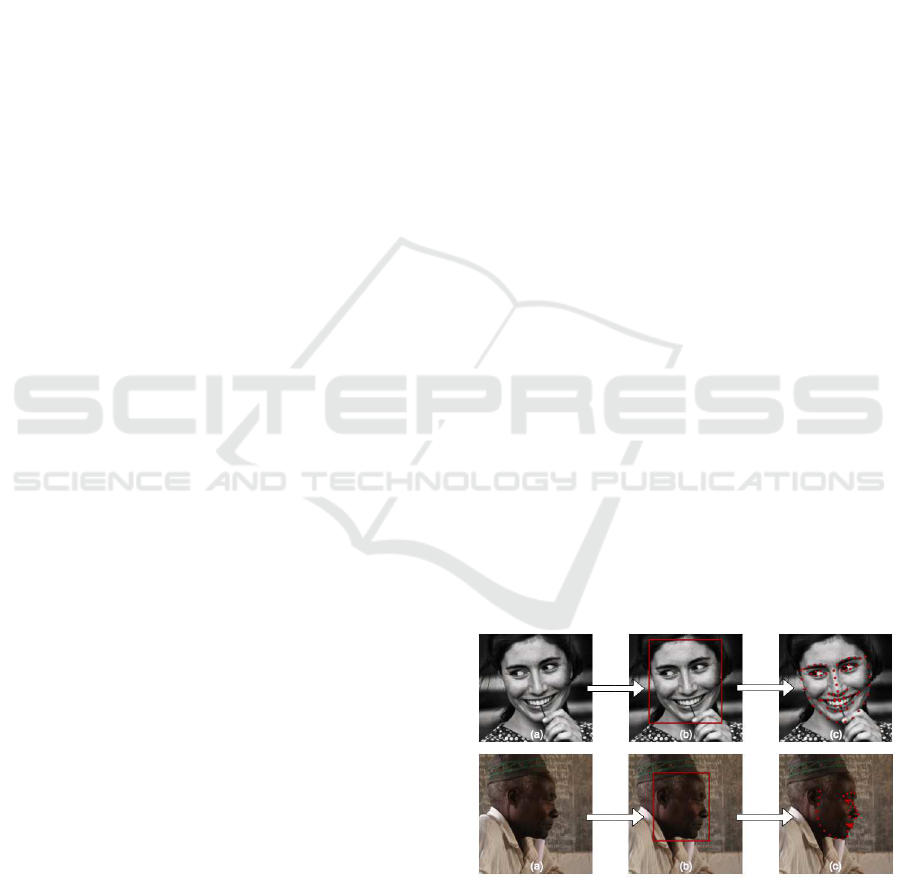
the alignment process, illustrated in Figure 1, consists
in determining the geometry of the face components
containing the most useful information (e.g., eyes,
nose, mouth). This ability to model non-rigid facial
structures is now used in various fields such as face
analysis (e.g., identification, expression recognition)
(Sun et al., 2014), human-computer interaction (Aka-
kin and Sankur, 2009) or information retrieval (Park
and Jain, 2010). However, despite the large number
of methods available in the literature, the performance
of face alignment under unconstrained conditions re-
mains limited (Sagonas et al., 2016).
Even today, this problem continues to be studied
using still images (Jin and Tan, 2016). Yet, due to the
ubiquity of video sensors, the vast majority of appli-
cations rely on image sequences. In addition, many
tasks related to face analysis or, more broadly, hu-
man behavior analysis have leveraged temporal infor-
mation (Simonyan and Zisserman, 2014; Fan et al.,
2016). The first survey on face alignment have al-
ready suggested to study the problem using image
sequences, but without providing actual arguments
(C¸ eliktutan et al., 2013). Our motivation in this paper
is to show that taking temporal information into ac-
count for this problem could greatly contribute to im-
prove performance under unconstrained conditions.
This article is structured as follows: in Section 2,
we describe the reasons that led us towards spatio-
temporal approaches for face alignment. In particu-
lar, we review the existing solutions and put into per-
spective the performance of the most recent methods.
Section 3 shows the benefits of temporal information
under unconstrained conditions. Finally, we conclude
with Section 4.
Figure 1: Face alignment process: (a) original image, (b)
face detection, (c) face alignment. Images from Menpo (Za-
feiriou et al., 2017).
Belmonte, R., Ihaddadene, N., Tirilly, P., Djeraba, C. and Bilasco, M.
Towards Spatio-temporal Face Alignment in Unconstrained Conditions.
DOI: 10.5220/0006651904330438
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 4: VISAPP, pages
433-438
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
433
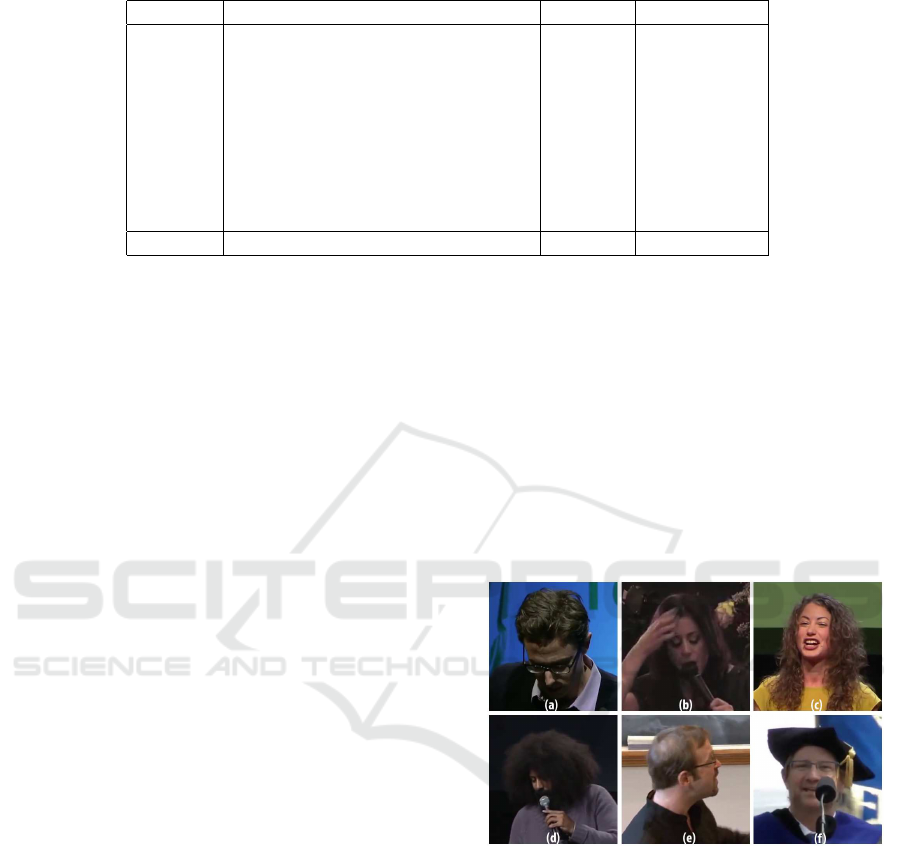
Table 1: Datasets captured under unconstrained conditions.
Type Datasets #Images #Landmarks
Static
AFLW (K
¨
ostinger et al., 2011) 25,993 21
AFW (Zhu and Ramanan, 2012) 250 6
HELEN (Le et al., 2012) 2,330 194
iBug (Sagonas et al., 2013) 135 68
LFPW (Belhumeur et al., 2013) 1,432 35
COFW (Burgos-Artizzu et al., 2013) 1,007 29
300W (Sagonas et al., 2016) 3,837 68
300W-LP (Zhu et al., 2016) 61,225 68
MENPO (Zafeiriou et al., 2017) 7564 68/39
Dynamic 300VW (Shen et al., 2015) 218,595 68
2 LITERATURE REVIEW
In this section, the datasets and evaluation metrics
used for face alignment under unconstrained condi-
tions are discussed. The main categories of methods
from literature are reviewed and their performance is
analyzed.
2.1 Datasets and Metrics
In recent years, many datasets for face alignment have
been made available to the scientific community (cf.
Table 1). The images included in these datasets are
collected on social networks or image search servi-
ces such as Google, Flickr, or Facebook, bringing
more realism to the data. The annotation is perfor-
med either manually or semi-automatically, someti-
mes with the help of the Amazon Mechanical Turk
platform. The quality of the annotations, however,
may vary (Sagonas et al., 2016; Bulat and Tzimiro-
poulos, 2017; C¸ eliktutan et al., 2013). The annotation
scheme used (i.e., position and number of landmarks)
may also differ from one dataset to another. Currently,
the scheme composed of 68 landmarks (Gross et al.,
2010), illustrated in Figure 1, is the most widely used.
Since this scheme does not fit at extreme poses, a 39-
point-based scheme has recently been proposed for
profile faces (Zafeiriou et al., 2017) (see Figure 1).
Today, due in particular to the emergence of deep
learning techniques, it may be necessary to have a
large number of annotated images, which existing da-
tasets do not necessarily provide. In the literature,
various augmentation methods are used to circum-
vent this problem. Some operations (e.g., rotation,
mirroring, disturbance of the detection window posi-
tion and size) can be applied to images to generate
new training samples. Other more complex processes
such as the generation of synthetic images may also
be used (Zhu et al., 2016).
Moreover, it is crucial to have data that is repre-
sentative of the problem in order to answer it. Sta-
tic datasets do not cover all the difficulties encoun-
tered by applications. The constraints related to the
movements of persons or cameras are not currently
considered. A dataset composed of image sequences
captured under unconstrained conditions has recently
been published by (Shen et al., 2015) (cf. Figure 2).
This data, in addition to being more realistic, provides
some clues in favor of the use of temporal information
for face alignment.
Figure 2: Challenges encountered under unconstrained con-
ditions: occlusions (b), (d), (f), pose (a), (e), illumination
(a), (b), expressions (c). Images from 300VW (Shen et al.,
2015).
To evaluate predictions on this data, the mean
square error normalized by the interocular distance
(NMSE) is generally used. Beyond an error value of
8%, landmarks are mostly not located correctly and
the prediction is considered as a failure. Normaliza-
tion by the interocular distance, although not very ro-
bust to extreme poses, is the most widespread. Ot-
her normalization factors are sometimes used, such
as the diagonal of the detection window. On a set of
images, average NMSE is the simplest and most in-
tuitive evaluation metric. However, it can be strongly
affected by a few outliers. A graphical representa-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
434
Table 2: Performances of recent literature methods. Normalized mean squared error is reported.
Method 300W-A 300W-B 300W
RCPR (Burgos-Artizzu et al., 2013) 6.18 17.26 8.35
SDM (Xiong and De la Torre, 2013) 5.57 15.40 7.50
ESR (Cao et al., 2014) 5.28 17.00 7.58
CFAN (Zhang et al., 2014) 5.50 16.78 7.69
LBF (Ren et al., 2014) 4.95 11.98 6.32
CFSS (Zhu et al., 2015) 4.73 9.98 5.76
RPPE (Yang et al., 2015a) 5.50 11.57 6.69
3DDFA (Zhu et al., 2016) 6.15 10.59 7.01
TCDCN (Zhang et al., 2016) 4.80 8.60 5.54
RAR (Xiao et al., 2016) 4.12 8.35 4.94
RCFA (Wang et al., 2016) 4.03 9.85 5.32
R-DSSD (Liu et al., 2017a) 4.16 9.20 5.59
tion of the error distribution function is therefore in-
creasingly used. It corresponds to the proportion of
images for which the error is less than or equal to a
certain threshold (e.g., 8%). The area under the curve
and the failure rate, that is, the percentage of images
for which the error is greater than the threshold, are
sometimes calculated from this representation.
2.2 Registration Solutions
In the literature, two main categories of methods to lo-
cate facial landmarks are proposed. First, there are ge-
nerative methods which rely on joint parametric mo-
dels of appearance and shape (Cootes et al., 2001).
The alignment is formulated as an optimization pro-
blem with the objective of finding the parameters al-
lowing the best possible instance of the model for a
given face. The appearance can be represented holis-
tically or locally, using regions of interest centered on
the landmarks.
Then, there are discriminative methods which in-
fer the position of the landmarks directly from the ap-
pearance of the face. They either learn independent
local detectors or regressors for each landmark asso-
ciated with a shape model that regularizes the pre-
dictions (Saragih et al., 2011), or one or more vec-
tor regression functions able to infer all the landmarks
and implicitly include a shape constraint (Xiong and
De la Torre, 2013; Cao et al., 2014; Ren et al., 2014;
Zhu et al., 2015). In this category, methods based
on deep learning (e.g., convolutional neural networks,
auto-encoders) have recently led to a significant im-
provement in performance under unconstrained con-
ditions, notably through their ability to model non-
linearity and learn problem-specific features (Xiao
et al., 2016; Wang et al., 2016; Liu et al., 2017a).
While most methods address the problem glo-
bally, some focus specifically on a single challenge
(Burgos-Artizzu et al., 2013; Yang et al., 2015a; Zhu
et al., 2016). (Burgos-Artizzu et al., 2013) expli-
citly model the occlusions and show that this addi-
tional information helps to improve the estimation of
landmarks positions under unconstrained conditions.
Training, however, requires to annotate occlusions.
(Zhu et al., 2016) focus on extreme poses and pro-
pose to infer a 3D dense model rather than a sparse
2D model. Their method is able to handle horizontal
variations ranging from -90
◦
to 90
◦
.
Others suggest that face alignment should not be
treated as an independent problem and propose to
jointly learn various related tasks in order to achieve
individual performance gains (Ranjan et al., 2016;
Zhang et al., 2016). In the work of (Zhang et al.,
2016), alignment is learned in conjunction with pose
estimation, gender recognition, facial expressions re-
cognition, and the appearance of facial attributes. Ho-
wever, this type of approach can make the training
stage much more complex because the convergence
rates may vary from one task to another.
The performance of current face alignment met-
hods are referenced in Table 2. These methods were
evaluated on the 300W dataset, composed of catego-
ries of variable difficulty. The 300-A category cor-
responds to images that do not include strong con-
straints. Category 300-B contains more complex ima-
ges with large variations in pose and expression, as
well as occlusions. We note that for category B the
average error is more than twice the one obtained on
category A.
Despite the quantity of methods proposed in the
literature and the recent major advances, we can see
from these results that the problems encountered un-
der unconstrained conditions are still far from being
solved. Because of their significant influence on fa-
cial appearance, variations in pose and occlusions are
among the most difficult challenges (Shen et al., 2015;
Sagonas et al., 2016). We show in Section 3 how tem-
poral approaches could help to address these problems.
Towards Spatio-temporal Face Alignment in Unconstrained Conditions
435

Table 3: Comparison of methods from (Shen et al., 2015; Chrysos et al., 2017), on the 3 categories of 300VW. Area under the
curve (AUC) and failure rate (FR) are reported.
Method
Category 1 Category 2 Category 3
AUC FR(%) AUC FR(%) AUC FR(%)
(Uric
´
ar et al., 2015) 0.657 7.622 0.677 4.131 0.574 7.957
(Xiao et al., 2015) 0.760 5.899 0.782 3.845 0.695 7.379
(Rajamanoharan and Cootes, 2015) 0.735 6.557 0.717 3.906 0.659 8.289
(Wu and Ji, 2015) 0.674 13.925 0.732 5.601 0.602 13.161
(Zhu et al., 2015; Danelljan et al., 2015) 0.729 6.849 0.777 0.167 0.684 8.242
(Yang et al., 2015c) 0.791 2.400 0.788 0.322 0.710 4.461
3 THE BENEFITS OF
TEMPORAL INFORMATION
In this section, we show how temporal information
can be beneficial to the problem of face alignment
under unconstrained conditions. Issues raised by the
dependence to face detection are first discussed. Con-
straints including the trajectories of the landmarks are
then pointed out as solutions to enhance the robust-
ness and quality of face alignment.
3.1 Rigid and Non-rigid Tracking
Face detection under unconstrained conditions is a
complex problem to solve (Zafeiriou et al., 2015). Gi-
ven its role in face alignment, (Yang et al., 2015b) stu-
died the dependence between these two tasks. They
showed a high sensitivity of alignment to detection
quality. Thus, besides detection failures, factors such
as variations in the scale and position of the detection
window may disrupt the alignment.
A solution to avoid the dependence on face de-
tection is to perform non-rigid face tracking. (Shen
et al., 2015) recently proposed a comparative analy-
sis of current non-rigid face tracking methods. The
results are referenced in Table 3. The most popu-
lar strategy is tracking by detection, that is, face de-
tection and alignment on each image independently,
without making use of adjacent frames. An alterna-
tive to tracking by detection is to use a substitute for
the detection such as a generic (i.e., rigid) tracking
algorithm (Danelljan et al., 2015). One of the advan-
tages of generic tracking algorithms is that they are
able to take into account some variations in the ap-
pearance of the target object during tracking (Kristan
et al., 2016). (Chrysos et al., 2017) evaluate this stra-
tegy and compare it to tracking by detection. In ge-
neral, generic tracking makes it possible to be more
robust to the challenges encountered under uncon-
strained conditions. It is, however, probable that, as
with detection, alignment is sensitive to changes in
the tracking window.
(Yang et al., 2015c) avoid face detection at
each frame or rigid tracking by proposing a spatio-
temporal cascade regression. They initialize the shape
at the current frame from the similarity parame-
ters at the previous frame. They incorporate a re-
initialization mechanism based on the quality of the
prediction in order to avoid any drift in the align-
ment. Their method can greatly reduce the failure rate
while improving overall performance (cf. Table 3).
(S
´
anchez-Lozano et al., 2016) propose an incremental
cascaded continuous regression. In contrast to (Yang
et al., 2015c) which retains a generic model after le-
arning, here a pre-trained model is updated online to
become specific to each person during tracking. This
type of approach yields better results than a generic
model. In the end, non-rigid tracking produces more
accurate fitting than tracking by detection. It takes
advantage of adjacent frames to improve initializa-
tion and variations in appearance to increasingly be-
come person-specific. Yet, other information such as
the trajectories of the landmarks through the image
sequence seems relevant to consider (Hamarneh and
Gustavsson, 2001). This will be discussed in detail in
the next subsection.
3.2 Additional Constraints
Whether explicit or implicit, the shape constraints
present in most alignment methods are crucial to
obtain good performance in unconstrained conditions.
In image sequences, an additional constraint may be
applied to the trajectories of the landmarks. Bayesian
filters such as Kalman filters or particle filters can be
used for this purpose. However, (De and Kautz, 2017)
highlighted the marginal gain provided by these ap-
proaches and showed the superiority of recurrent neu-
ral networks for dynamic face analysis.
(Peng et al., 2016; Hou et al., 2017) also use re-
current neural networks to exploit the dynamic featu-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
436
res of the face. They compare a recurrent and a non-
recurrent version of their network and show that re-
current learning improves the stability of predictions
and the robustness to occlusions, variations in pose
and expressions. The performances of their methods
are referenced in Table 4. Taking into account tem-
poral information results in a decrease of the average
error of more than 1% compared to state-of-the art
static methods.
Table 4: Comparison of a static multi-task method (Zhang
et al., 2016), with three dynamic methods based on recur-
rent neural networks (Peng et al., 2016; De and Kautz,
2017; Liu et al., 2017b). Normalized mean squared error
is reported.
Approach Method 300VW
Static (Zhang et al., 2016) 7.59
Dynamic
(Peng et al., 2016) 6.25
(De and Kautz, 2017) 6.16
(Liu et al., 2017b) 5.59
More recently, (Liu et al., 2017b) propose a
two-stream recurrent network composed of a spatial
stream that preserve the holistic facial shape structure
and a temporal stream that discover shape-sensitive
and spatio-temporal features. Their method outper-
forms those based on a single stream (see Table 4).
These are only the beginnings of the use of temporal
information for the problem of face alignment. Re-
current neural networks, although advantageous, are
capable of characterizing only the global motion. In
other related tasks, local motion (i.e., over a few fra-
mes) sometimes associated with global motion has led
to interesting results (Hasani and Mahoor, 2017; Fan
et al., 2016) and could be equally beneficial to face
alignment.
4 CONCLUSION
In this paper we presented a review of current work on
face alignment under unconstrained conditions. This
problem has been studied on still images for several
decades, despite applications being mainly based on
image sequences. Moreover, many tasks related to
face analysis or, more broadly, human behavior ana-
lysis have leveraged temporal information. To the
best of our knowledge, this is one of the first sur-
veys to quantify the difference between static and dy-
namic face alignment methods. Especially, we have
shown that taking into consideration the temporal in-
formation greatly contribute to overcome unconstrai-
ned conditions challenges. Recent work that exploit
the dynamic features of the face are able to improve
initialization and stability of predictions leading to
more accurate fitting. Nevertheless, there is still much
to be done.
REFERENCES
Akakin, H. C. and Sankur, B. (2009). Analysis of head and
facial gestures using facial landmark trajectories. In
European Workshop on Biometrics and Identity Ma-
nagement, pages 105–113.
Belhumeur, P. N., Jacobs, D. W., Kriegman, D. J., and Ku-
mar, N. (2013). Localizing parts of faces using a
consensus of exemplars. IEEE Transactions on Pat-
tern Analysis and Machine intelligence, 35(12):2930–
2940.
Bulat, A. and Tzimiropoulos, G. (2017). How far are we
from solving the 2D & 3D face alignment problem?
(and a dataset of 230,000 3D facial landmarks). arXiv
preprint arXiv:1703.07332.
Burgos-Artizzu, X. P., Perona, P., and Doll
´
ar, P. (2013).
Robust face landmark estimation under occlusion. In
ICCV, pages 1513–1520.
Cao, X., Wei, Y., Wen, F., and Sun, J. (2014). Face align-
ment by explicit shape regression. International Jour-
nal of Computer Vision, 107(2):177–190.
C¸ eliktutan, O., Ulukaya, S., and Sankur, B. (2013). A
comparative study of face landmarking techniques.
EURASIP Journal on Image and Video Processing,
2013(1):13.
Chrysos, G. G., Antonakos, E., Snape, P., Asthana, A., and
Zafeiriou, S. (2017). A comprehensive performance
evaluation of deformable face tracking “in-the-wild”.
International Journal of Computer Vision, pages 1–
35.
Cootes, T. F., Edwards, G. J., and Taylor, C. J. (2001).
Active appearance models. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 23(6):681–
685.
Danelljan, M., Hager, G., Shahbaz Khan, F., and Felsberg,
M. (2015). Learning spatially regularized correlation
filters for visual tracking. In ICCV, pages 4310–4318.
De, J. G. X. Y. S. and Kautz, M. J. (2017). Dynamic facial
analysis: From bayesian filtering to recurrent neural
network. In CVPR.
Fan, Y., Lu, X., Li, D., and Liu, Y. (2016). Video-based
emotion recognition using CNN-RNN and C3D hy-
brid networks. In International Conference on Multi-
modal Interaction, pages 445–450.
Gross, R., Matthews, I., Cohn, J., Kanade, T., and Baker,
S. (2010). Multi-PIE. Image and Vision Computing,
28(5):807–813.
Hamarneh, G. and Gustavsson, T. (2001). Deformable
spatio-temporal shape models: Extending ASM to
2D+ time. In BMVC, pages 1–10.
Hasani, B. and Mahoor, M. H. (2017). Facial expression re-
cognition using enhanced deep 3D convolutional neu-
ral networks. arXiv preprint arXiv:1705.07871.
Towards Spatio-temporal Face Alignment in Unconstrained Conditions
437

Hou, Q., Wang, J., Bai, R., Zhou, S., and Gong, Y. (2017).
Face alignment recurrent network. Pattern Recogni-
tion.
Jin, X. and Tan, X. (2016). Face alignment in-the-wild: A
survey. arXiv preprint arXiv:1608.04188.
K
¨
ostinger, M., Wohlhart, P., Roth, P. M., and Bischof, H.
(2011). Annotated facial landmarks in the wild: A
large-scale, real-world database for facial landmark
localization. In ICCV Workshops, pages 2144–2151.
Kristan, M., Leonardis, A., Matas, J., Felsberg, M., Pflug-
felder, R.,
ˇ
Cehovin, L., Vojir, T., H
¨
ager, G., Luke
ˇ
zi
ˇ
c,
A., and Fernandez, G. (2016). The visual object
tracking vot2016 challenge results. In ECCV Works-
hops, pages 777–823, Cham.
Le, V., Brandt, J., Lin, Z., Bourdev, L., and Huang, T.
(2012). Interactive facial feature localization. ECCV,
pages 679–692.
Liu, H., Lu, J., Feng, J., and Zhou, J. (2017a). Lear-
ning deep sharable and structural detectors for face
alignment. IEEE Transactions on Image Processing,
26(4):1666–1678.
Liu, H., Lu, J., Feng, J., and Zhou, J. (2017b). Two-stream
transformer networks for video-based face alignment.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Park, U. and Jain, A. K. (2010). Face matching and retrieval
using soft biometrics. IEEE Transactions on Informa-
tion Forensics and Security, 5(3):406–415.
Peng, X., Feris, R. S., Wang, X., and Metaxas, D. N. (2016).
A recurrent encoder-decoder network for sequential
face alignment. In ECCV, pages 38–56.
Rajamanoharan, G. and Cootes, T. F. (2015). Multi-view
constrained local models for large head angle facial
tracking. In ICCV Workshops, pages 18–25.
Ranjan, R., Patel, V. M., and Chellappa, R. (2016). Hyper-
face: A deep multi-task learning framework for face
detection, landmark localization, pose estimation, and
gender recognition. arXiv preprint arXiv:1603.01249.
Ren, S., Cao, X., Wei, Y., and Sun, J. (2014). Face align-
ment at 3,000 fps via regressing local binary features.
In CVPR, pages 1685–1692.
Sagonas, C., Antonakos, E., Tzimiropoulos, G., Zafeiriou,
S., and Pantic, M. (2016). 300 faces in-the-wild chal-
lenge: Database and results. Image and Vision Com-
puting, 47:3–18.
Sagonas, C., Tzimiropoulos, G., Zafeiriou, S., and Pantic,
M. (2013). A semi-automatic methodology for fa-
cial landmark annotation. In CVPR Workshops, pages
896–903.
S
´
anchez-Lozano, E., Martinez, B., Tzimiropoulos, G., and
Valstar, M. (2016). Cascaded continuous regression
for real-time incremental face tracking. In ECCV, pa-
ges 645–661.
Saragih, J. M., Lucey, S., and Cohn, J. F. (2011). Deforma-
ble model fitting by regularized landmark mean-shift.
International Journal of Computer Vision, 91(2):200–
215.
Shen, J., Zafeiriou, S., Chrysos, G. G., Kossaifi, J., Tzimi-
ropoulos, G., and Pantic, M. (2015). The first facial
landmark tracking in-the-wild challenge: Benchmark
and results. In ICCV Workshops, pages 1003–1011.
Simonyan, K. and Zisserman, A. (2014). Two-stream con-
volutional networks for action recognition in videos.
In NIPS, pages 568–576.
Sun, Y., Wang, X., and Tang, X. (2014). Deep learning
face representation from predicting 10,000 classes. In
CVPR, pages 1891–1898.
Uric
´
ar, M., Franc, V., and Hlav
´
ac, V. (2015). Facial land-
mark tracking by tree-based deformable part model
based detector. In ICCV Workshops, pages 10–17.
Wang, W., Tulyakov, S., and Sebe, N. (2016). Recurrent
convolutional face alignment. In ACCV, pages 104–
120.
Wu, Y. and Ji, Q. (2015). Shape augmented regression met-
hod for face alignment. In ICCV Workshops, pages
26–32.
Xiao, S., Feng, J., Xing, J., Lai, H., Yan, S., and Kassim, A.
(2016). Robust facial landmark detection via recurrent
attentive-refinement networks. In ECCV, pages 57–
72.
Xiao, S., Yan, S., and Kassim, A. A. (2015). Facial land-
mark detection via progressive initialization. In ICCV
Workshops, pages 33–40.
Xiong, X. and De la Torre, F. (2013). Supervised des-
cent method and its applications to face alignment. In
CVPR, pages 532–539.
Yang, H., He, X., Jia, X., and Patras, I. (2015a). Robust
face alignment under occlusion via regional predictive
power estimation. IEEE Transactions on Image Pro-
cessing, 24(8):2393–2403.
Yang, H., Jia, X., Loy, C. C., and Robinson, P. (2015b).
An empirical study of recent face alignment methods.
arXiv preprint arXiv:1511.05049.
Yang, J., Deng, J., Zhang, K., and Liu, Q. (2015c). Facial
shape tracking via spatio-temporal cascade shape re-
gression. In ICCV Workshops, pages 41–49.
Zafeiriou, S., Trigeorgis, G., Chrysos, G., Deng, J., and
Shen, J. (2017). The menpo facial landmark localisa-
tion challenge: A step towards the solution. In CVPR
Workshops.
Zafeiriou, S., Zhang, C., and Zhang, Z. (2015). A survey
on face detection in the wild: past, present and future.
Computer Vision and Image Understanding, 138:1–
24.
Zhang, J., Shan, S., Kan, M., and Chen, X. (2014). Coarse-
to-fine auto-encoder networks for real-time face alig-
nment. In ECCV, pages 1–16.
Zhang, Z., Luo, P., Loy, C. C., and Tang, X. (2016). Lear-
ning deep representation for face alignment with auxi-
liary attributes. IEEE Transactions on Pattern Analy-
sis and Machine Intelligence, 38(5):918–930.
Zhu, S., Li, C., Change Loy, C., and Tang, X. (2015).
Face alignment by coarse-to-fine shape searching. In
CVPR, pages 4998–5006.
Zhu, X., Lei, Z., Liu, X., Shi, H., and Li, S. Z. (2016).
Face alignment across large poses: A 3D solution. In
CVPR, pages 146–155.
Zhu, X. and Ramanan, D. (2012). Face detection, pose es-
timation, and landmark localization in the wild. In
CVPR, pages 2879–2886.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
438
