
Motion Prediction Influence on the Pedestrian Intention Estimation
Near a Zebra Crossing
J
´
ulia
ˇ
Skovierov
´
a, Anton
´
ın Vobeck
´
y, Miroslav Uller, Radoslav
ˇ
Skoviera and V
´
aclav Hlav
´
a
ˇ
c
Czech Technical University in Prague, Czech Institute on Informatics, Robotics and Cybernetics,
166 36 Praha 6, Dejvice, Jugoslavskych partyzanu 1580/3, Czech Republic
Radoslav.Skoviera@cvut.cz, Vaclav.Hlavac@cvut.cz
Keywords:
Motion Prediction, Intention Estimation, Autonomous Driving.
Abstract:
The reported work contributes to the self-driving car efforts, more specifically to scenario understanding from
the ego-car point of view. We focus on estimating the intentions of pedestrians near a zebra crossing. First,
we predict the future motion of detected pedestrians in a three seconds time horizon. Second, we estimate the
intention of each pedestrian to cross the street using a Bayesian network. Results indicate, that the dependence
between the error rate of motion prediction and the intention estimation is sub-linear. Thus, despite the lower
performance of motion prediction for the time scope larger than one second, the intention estimation remains
relatively stable.
1 INTRODUCTION, CONCEPTS
Despite the progress in autonomous cars, many un-
solved problems have remained, including driving in
highly populated areas. UP-DRIVE project, in which
we participate, addresses these issues. In this paper,
we consider traffic situations from the autonomous
vehicle point of view; We name it the ego-car.
UP-DRIVE consortium has been developing
a demonstration platform consisting of an automated
car, a sensor-rich electric car, VW e-Golf, and a cloud
environment to demonstrate automated transportation
in urban environments. UP-DRIVE explores as back-
ground knowledge the know-how and the technology
of the V-CHARGE project (project-V-Charge, 2015).
The overall UP-DRIVE scientific and technological
scope has been framed by the automated parking and
driving in urban environments with speeds up to 30
km/h.
The reasoning part of UP-DRIVE deals with the
unavoidable K. G
¨
odel’s logical incompleteness and
the grounding problem (Harnad, 1990). We approach
both these problems rather pragmatically as most
other approaches do. The objects, i.e. entities of inter-
est, distinguish important information from the unim-
portant background for a particular task and a needed
resolution of detail. We take into account detectable
objects only. The object detector is set/learned sta-
tistically for a particular detected entity, e.g. a car
or a lamppost. The relation between the syntax (ob-
servation) and its semantics (a particular type of ob-
jects from the considered logical model) is innate to
objects in our construction. For our specific traffic
scenarios, we divide objects into two classes, (a) static
objects; (b) dynamic objects, e.g. a walking pedes-
trian, a riding cyclist. If a dynamic object does not
move for a short time it is still considered a dynamic
object.
In the self-driving domain, one of the most chal-
lenging tasks is the detection of dangerous situations
and finding appropriate mitigation procedure for each
of them. The ego-car has to perceive and understand
what is happening in its surrounding. Static objects,
dynamic objects, traffic participants (objects relevant
to a particular situation) have to be detected, repre-
sented in such a way that the relations among them
can be expressed, usually in a form of a graph. Hav-
ing past data and stored experience of this applica-
tion domain, enables the ego-car to predict inten-
tions, heading, and position of other traffic partici-
pants. The context related to the particular situation
enhances the ego-car competence and success in the
superordinate decision making process.
There is a need to establish a hierarchy, still from
the ego-car point of view. A more general concept
is the (traffic) scenario, e.g. approaching the ze-
bra crossing or avoiding a car, which stopped ahead
of the ego-car. A particular (traffic) scenario consists
Škovierová, J., Vobecký, A., Uller, M., Škoviera, R. and Hlavá
ˇ
c, V.
Motion Prediction Influence on the Pedestrian Intention Estimation Near a Zebra Crossing.
DOI: 10.5220/0006694403410348
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 341-348
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
341

of several (traffic) situations. As the example, con-
sider a traffic scenario when the ego-car approaches
a zebra crossing. The related traffic situations might
be: checking if there is a car in front of ego-car giving
the way on the crossing already, checking if there are
no pedestrians on the crossing, checking if there are
pedestrians on both sides of the road and predicting
the probability they will intend to cross the road at the
considered crossing. The given example was a sim-
plistic one because the scenario consisted of a linearly
ordered chain of situations. Actually, situations may
be organized in a more complicated way. We order
the possible approaches from the simplest to the most
difficult one: (a) a nondeterministic finite automaton;
(b) a Markov field or (c) a predicate calculus-based
logic dealing with uncertainty (Russell, 2015).
The contextual information and information about
the intentions of other participants is necessary to
cope with rather different traffic situations. For ex-
ample, the car ahead of the ego-car may stop because
of another car or it intends initiating a parking ma-
neuver or a pedestrian plans to cross the street. Each
of these situation is different; also due to the relevant
contextual information.
2 TASK FORMULATION
The intention estimation of other traffic participants
is crucial for correct scene understanding for au-
tonomous driving. We deal with the intention predic-
tion task for dynamic objects, i.e. the pedestrians.
In this paper, we deal specifically with the traf-
fic scenario where the ego-car approaches a zebra
pedestrian crossing. Even more specifically, we stud-
ied and proposed the method estimating the pedes-
trian’s intention and predicting the pedestrian’s mo-
tion in a one, two, and three seconds time horizon.
We also investigated the impact of motion prediction
algorithm on the result of intention estimation.
However, the suggested approach is rather gen-
eral. It can be applied to other (traffic) scenarios and
situations as well.
3 RELATED WORK
Understanding the current traffic situation is a crucial
intermediate step on the way towards a self-driving
car. The dynamic objects motion prediction based
solely on physical laws (inertia) does not suffice. The
intentions of other dynamic objects, traffic partici-
pants, has to be estimated and taken into account in
the reasoning module. Let us divide the state-of-the-
art analysis relevant to our task formulated above into
three parts.
3.1 Motion Prediction
Authors of the survey (Lef
`
evre et al., 2014) focused
on the motion prediction and the risk assessment
in traffic situations. They claim that there are three
main groups of motion prediction and intention esti-
mation models:
• Physics-based models (e.g. (Ammoun and
Nashashibi, 2009), (Br
¨
annstr
¨
om et al., 2010)).
Such motion models are the simplest ones, which
consider that the motion of vehicles depends
on the laws of physics only. They can reliably
predict the motion of other traffic participants
for up to 1 second into the future. Physics-based
models have been used most widely.
• Maneuver-based motion models (e.g. (Kumar
et al., 2013), (Morris et al., 2011), or (Tamke
et al., 2011)) are more complex than physics-
based models because intentions of other traffic
participants are taken into account. A trajectory
prediction with maneuver-based motion models
relies on the early recognition of the maneuvers
that a driver intends to perform. The approach
is based either on prototype trajectories or on ma-
neuver intention estimation. The disadvantage
is that interactions between traffic participants are
not considered.
• Interaction-aware motion models are most com-
plex and consider the inter-dependencies be-
tween maneuvers of multiple traffic participants.
They take into account interactions between
different traffic participants, which contributes
to a better understanding of the situation. How-
ever, the complexity of these models is very
high. These models are based either on proto-
type trajectories (e.g. (Kfer et al., 2010)) or on
Dynamic Bayesian Networks (DBN) (e.g. (Tay,
2009), (M. Liebner and Stiller, 2012), (Gindele
et al., 2010), (Lefvre et al., 2012), (Lef
`
evre et al.,
2013)).
The interaction-aware motion models allow
longer-term predictions compared to physics-
based motion models. They are also more re-
liable than maneuver-based motion models be-
cause they take into account dependencies among
dynamic traffic scenario participants. It is very
difficult to use interaction-aware models in real-
time risk assessment, because the computation
of the potential trajectories of the vehicles is com-
putationally very expensive. For this reason, some
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
342

risk assessment techniques have been proposed
recently, which do not rely on trajectory predic-
tion.
3.2 Intention Estimation
Estimating the intentions of other traffic participants
(pedestrians, cyclists, and vehicles) is not easy. There
are several approaches to motion planning, intention
estimation, and motion prediction. The latter two ap-
proaches are interrelated. The estimation of the par-
ticular traffic participant’s behavior is usually based
on observations of the surrounding context and previ-
ous motion patterns of other involved traffic partici-
pants.
In (Armand et al., 2014), the authors proposed
ontology-based context awareness for driving assis-
tance systems. They used the contextual informa-
tion for the prediction of other traffic participants be-
havior. They formulated the ontology representing
the vehicle, perceived entities, and context. The pro-
posed ontology allows for a coherent understanding
of the interactions between perceived entities and con-
textual data. However, the approach considers only
a one-dimensional driving space. Therefore, more re-
search in this area is needed.
A framework for estimating a driver’s decisions
near intersections was presented in (Gadepally et al.,
2014). The authors suggested an architecture describ-
ing the coupling between the vehicle and the driver
through Hybrid-State-Systems (HSSs). In order to es-
timate the state of a vehicle, the authors used a frame-
work, which consists of HSSs and Hidden Markov
Models (HMMs). This framework provides more ac-
curate results than the human observer.
Another approach for learning continuous, non-
linear, and context-dependent behavior models
of other traffic participants was presented in (Gin-
dele et al., 2015). The authors proposed a Bayesian
model for the estimation and prediction of traffic sit-
uations, where the context-dependent policy model
is used to predict the behavior of other traffic partic-
ipants based on contextual information. Expectation
Maximization (EM) approach for learning the model
from unlabeled observations was used. This model
can cope better with noisy sensors and uphold a valid
estimation even if the traffic participants are occluded
for longer periods of time. The approach allows more
precise long-term (up to 6 seconds) predictions with-
out neglecting the uncertainty.
3.3 Pedestrians Safety
The safety of the traffic participants and especially
pedestrians in the complicated traffic situations is cru-
cial. Based on the (WHO, 2013), 1.2 million peo-
ple in the world die in traffic accidents each year.
In the study (Hamdane et al., 2015), the authors
analyze real crashes involving pedestrians in order
to evaluate the potential effectiveness of Autonomous
Emergency Breaking system (AEB) in pedestrian
protection. The achieved results of this study can
be also used in other areas such autonomous driving.
It has been found, that until 1.5 second, the position
of the pedestrians relative to the vehicle are still scat-
tered and will largely not invoke any response from
AEB system. Therefore the prediction of the motion
and intention of pedestrians can be very helpful in an
successful effort to avoid accidents.
4 DATA USED IN EXPERIMENTS
The data used in this paper come from a real traffic
captured by UP-DRIVE experimental car. Current ex-
periments use range data taken by several Velodyne
VLP-16 Puck LiDARs, which are placed on the roof
of the UP-DRIVE experimental car.
Using the data received from the LiDARs and the
GPS position of the ego-car, information about other
traffic participants is calculated. The data contain
position, speed and orientation information about all
traffic participants. For traffic participants other than
the ego-car, classification is also available (e.g. car,
pedestrian,...).
In other related papers, more information is usu-
ally used (e.g. pose of pedestrians). However, in our
project, we are focusing on developing a prediction
algorithm with as little information as possible, due
to the lower computation demands.
5 SIMPLE MOTION
PREDICTION
Correct short-term prediction of pedestrian motion
is an important issue when dealing with pedestrian
safety in traffic situations. We used a simple physics-
based prediction (Sec. 3.1), which explores the previ-
ous position of the pedestrians. The presented motion
prediction consists of two steps:
1. filtration of the input data;
2. linear regression of the motion.
Motion Prediction Influence on the Pedestrian Intention Estimation Near a Zebra Crossing
343
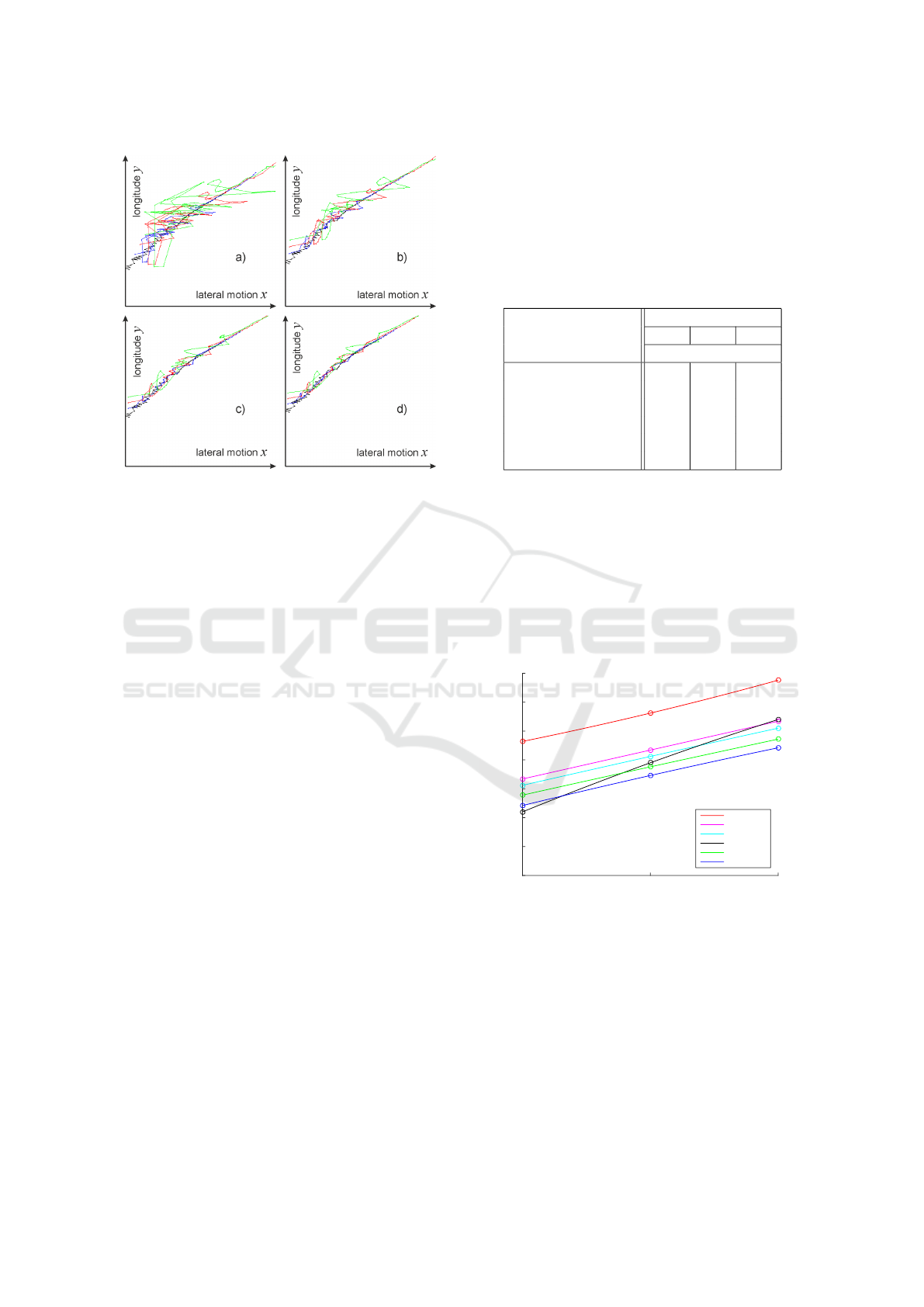
Figure 1: Motion of a pedestrian: a) Without filtering; Cu-
bic filtering with previous positions gathered from: b) 1 sec-
ond window; c) 2 seconds window, d) 3 seconds window
into the past.
The filtering step was used for smoothing out
a noisy input data. Several different filtering methods
were applied: average, linear, exponential, quadratic,
and cubic. The input data from several previous mea-
sured steps were filtered and subsequently the lin-
ear regression was used for estimating the future
position of the pedestrian. The filtering was per-
formed with different time window size (one, two
and three seconds from the past) on previous mea-
sured data. The visualization of the results of cu-
bic filtering and predictions for different window
sizes is shown in Fig. 1, where the y-axis repre-
sents the longitudinal and x-axis represent the lat-
eral position of the pedestrian. The curve itself is
parametrized by time. The whole curve corresponds
to about 8 seconds duration. The sampling is every
0.1 seconds. The black curve represents the actual
motion of the pedestrian, the blue curve represents
the motion prediction in time t + 1 second, the red
curve represents the prediction in time t + 2 seconds,
and the green curve represents the prediction in time
t + 3 seconds.
The quality of the predicted pedestrian’s posi-
tion was determined based on the difference between
the predicted position and the real measured posi-
tion in time t
i
given in meters. Two requirements on
the quality of the prediction that were used in this ap-
plication are:
1. If the difference of the predicted pedestrian’s po-
sition and the real measured position in time t
i
is lower than one meter, this prediction is consid-
ered as successful.
2. The distance between one and three meters is de-
creasing exponentially and slowly. The three-
meter break point is based on the width of the road
line.
Table 1: The success rate of the motion prediction for vari-
ous data filtering methods.
Time prediction
Method 1s 2s 3s
Quality [%]
Average 62.9 53.0 42.8
Linear 80.1 70.1 61.1
Exponential 83.5 73.5 64.6
Without smoothing 91.6 80.5 68.8
Quadratic 88.5 79.1 70.0
Cubic 91.8 83.6 74.3
The prediction of the motion was set for three
different time intervals from the current time t, i.e.:
t + 1, t + 2 and t + 3 seconds. The obtained results
are presented in Table 1, which shows individual fil-
tering methods and the corresponding prediction re-
sults of the future position. The results are listed from
the lowest achieved score for time t + 3s. The ab-
solute prediction deviations of used filtering methods
in considered time intervals are shown in Fig 2.
Prediction delay (seconds)
1 2 3
Absolute prediction deviation (meters)
0
0.5
1
1.5
2
2.5
3
3.5
average
linear
exponential
no filtering
quadratic
cubic
Figure 2: Absolute motion prediction deviation.
As it can be seen,the smallest deviation for the
one second prediction is for prediction without filter-
ing. However, the prediction worsens in the next two
time instances drastically. The cubic filtering has only
slightly worse prediction error in the first second, but
it showed the best absolute prediction for the remain-
ing time instances as well as the best overall predic-
tion quality. Based on these results, we have decided
to use the cubic filtering.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
344
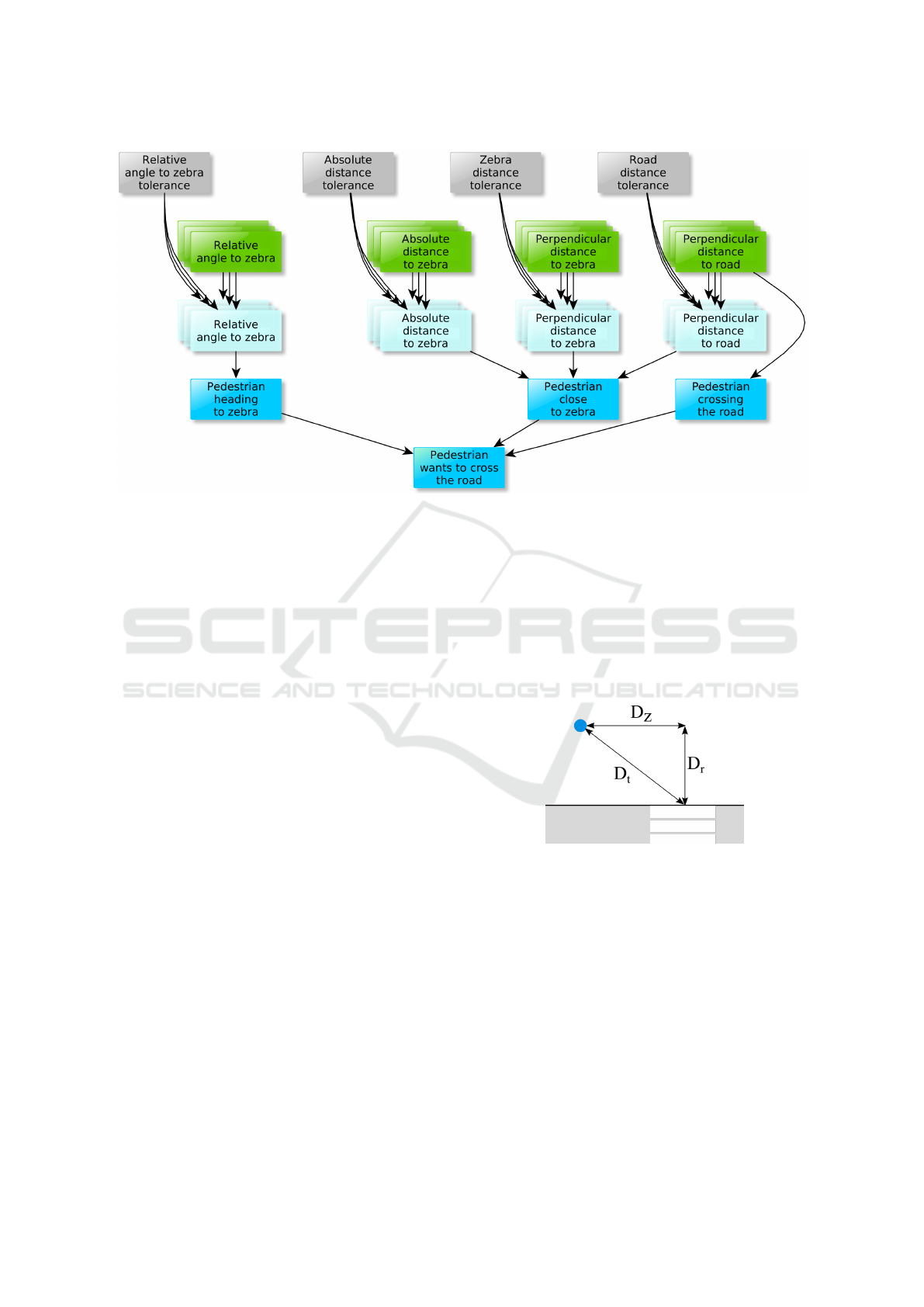
Figure 3: Proposed Bayesian network for the pedestrian intention estimation.
6 INTENTION ESTIMATION OF
PEDESTRIANS
For the situations near zebra crossing, it is important
to predict the future intentions of pedestrians, espe-
cially the intention to cross a street. Several different
approaches can be used for estimating the pedestrian’s
intention. The most often used methods use graphi-
cal models such as Bayesian networks (e.g. (Gindele
et al., 2015), (Kooij et al., 2014)) or Hidden Markov
Models (e.g. (Song et al., 2016),(Gadepally et al.,
2014)). Another approach in modeling the behavior
of the agents are Finite-State Machines (FSM). Based
on our findings, we decided to use Bayesian networks
as well.
The proposed Bayesian network was designed
for the intention estimation of pedestrians near a ze-
bra crossing. This network works with measured in-
put data, which are captured by sensors used in UP-
DRIVE project car. Input information such as map
(e.g., the location of the zebra crossings, traffic light,
road crossings), the ego-car position, speed, accel-
eration, etc., and other traffic participants were con-
sidered. The proposed Bayesian network is shown
in Fig. 3. Besides the current measured state, it also
takes into account several previous states. The nodes
in the presented Bayesian network (Fig. 3) can be
divided as follows: Tolerance node (gray), Mea-
sured data node (green), Likelihood node (light
blue) and Conditional probability tables node (dark
blue).
Tolerance Node
The tolerance node provides a control parameter
for a likelihood function. It represents a threshold,
under which the likelihood remains equal to 1. For
example, if the distance of a pedestrian to a zebra
crossing is lower than the tolerance, the likelihood
of the pedestrian present on the zebra crossing is 1.
Figure 4: Demonstration of the distance computation.
Measured Data
The measured data nodes provide second control
parameters for the likelihood functions. Based
on the measured data, we are computing several quan-
tities:
• Pedestrian distance to the zebra (D
z
) in the direc-
tion parallel to the road (Fig. 4).
• Pedestrian distance to the road (D
r
), which can
have both positive and negative values. Nega-
tive values mean that the pedestrian is walking
on the road meaning he/she is most likely already
crossing the road.
Motion Prediction Influence on the Pedestrian Intention Estimation Near a Zebra Crossing
345
• Total distance (D
t
) to the zebra crossing. This dis-
tance is measured as a direct (absolute) distance
between the pedestrian and the zebra crossing.
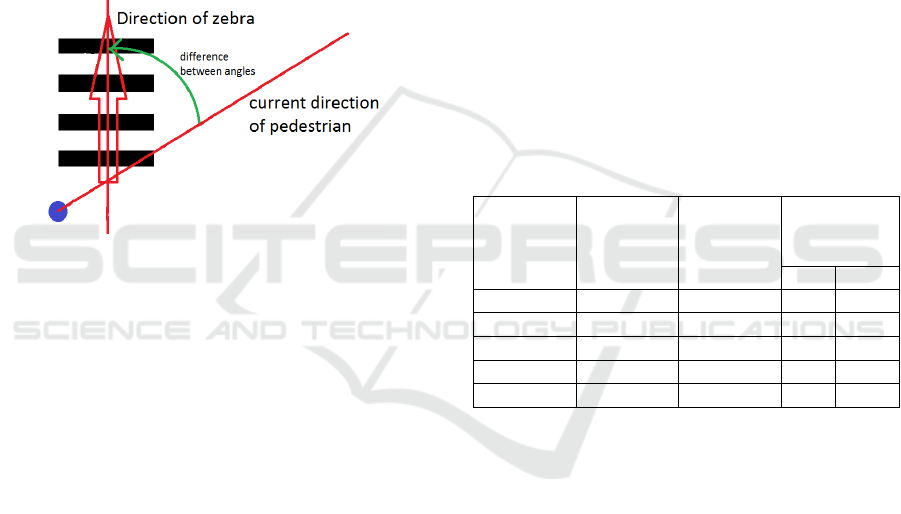
• Angle between the pedestrian’s heading
and the direction towards the zebra cross-
ing. The value of this angle is the difference
between the current direction (vector) of pedes-
trian’s walking heading and a vector parallel with
the zebra crossing, illustrated in Fig. 5. If we
would measure the difference of these directions
just clockwise or counterclockwise, it would be
possible to measure even greater differences (in
h0, 2π)). Therefore we choose the smaller value
of difference in clockwise or counterclockwise
and take its absolute value.
Figure 5: Angle of the pedestrian towards the zebra cross-
ing.
Likelihood Node
In the likelihood nodes, the measured data, along
with the tolerances, are used as control parameters
for a likelihood function. This way, the measurements
are converted into likelihoods that can be further used
to calculate the desired probabilities. There were two
requirements on the likelihood function used in this
application.
1. The likelihood must remain 1 until the quantity
reaches some threshold, e.g. the width of the road
when considering the likelihood of a pedestrian
being on the road.
2. Beyond the threshold, the likelihood must decay
quickly at first and decay to zero slowly after-
wards until the measured quantity reaches some
maximal value.
The function that satisfies these requirements can
be constructed by combining a constant function with
an exponential function, which is the approach chosen
for this paper (see eq. 1).
L (x|t) =
(
1 x < t
λ exp(−λx) x = t
(1)
Conditional Probability Table (CPT)
The conditional probability distribution is the proba-
bility of the assignment to a variable, given known as-
signments for another variable(s). P (X|Y) is the prob-
ability of every possible assignment to X, for every
possible assignment to Y , for discrete variables.
The example of such conditional probability used
in this contribution is presented in Table 2. The
table shows the CPT for the conditional probabil-
ity P (X|Y, Z,W ), where Y, Z,W is the evidence (Y
= pedestrian is crossing the street, Z = pedestrian
is close to zebra, W = pedestrian is heading towards
zebra), and X is the requested result describing the
probability that the pedestrian intends to cross the
street. Currently, a simplistic approach sets each mea-
sured value to true or false by thresholding each cal-
culated likelihood values. Based on these thresh-
olded values, we can determine overall probabil-
ity of the considered phenomenon, e.g. probability
of the pedestrian’s intention to cross the street.
Table 2: Conditional probability table for the output node
of the proposed BN.
Pedestrian Pedestrian Pedestrian Pedestrian
crossing close heading will cross
the road to zebra towards the street
zebra true f alse
true any any 1.0 0.0
f alse true true 0.9 0.1
f alse true f alse 0.7 0.3
f alse f alse true 0.5 0.5
f alse f alse f alse 0.0 1.0
The individual probabilities of pedestrian’s inten-
tion to cross the street were computed for each mo-
tion prediction estimated 1, 2, and 3 seconds into
the future. Consequently, the overall probability
of pedestrian wanting to cross the street was com-
puted as a weighted sum of the probabilities for each
time instance.
The visualization of the processed data is pre-
sented in Fig. 6. The pedestrians are represented
by simple rectangles, where the movement direction
for each pedestrian is displayed. The color of each
pedestrian is changing in dependence of the proba-
bility that the pedestrian crosses the street. The blue
color represents the zero probability (e.g. a pedes-
trian is walking away from the road) and is changing
through purple to red, where the probability is highest
(e.g. pedestrian is on the road). For each pedestrian,
the probability of crossing the street is displayed,
where the first number represents the probability,
where the future position is considered, and the sec-
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
346
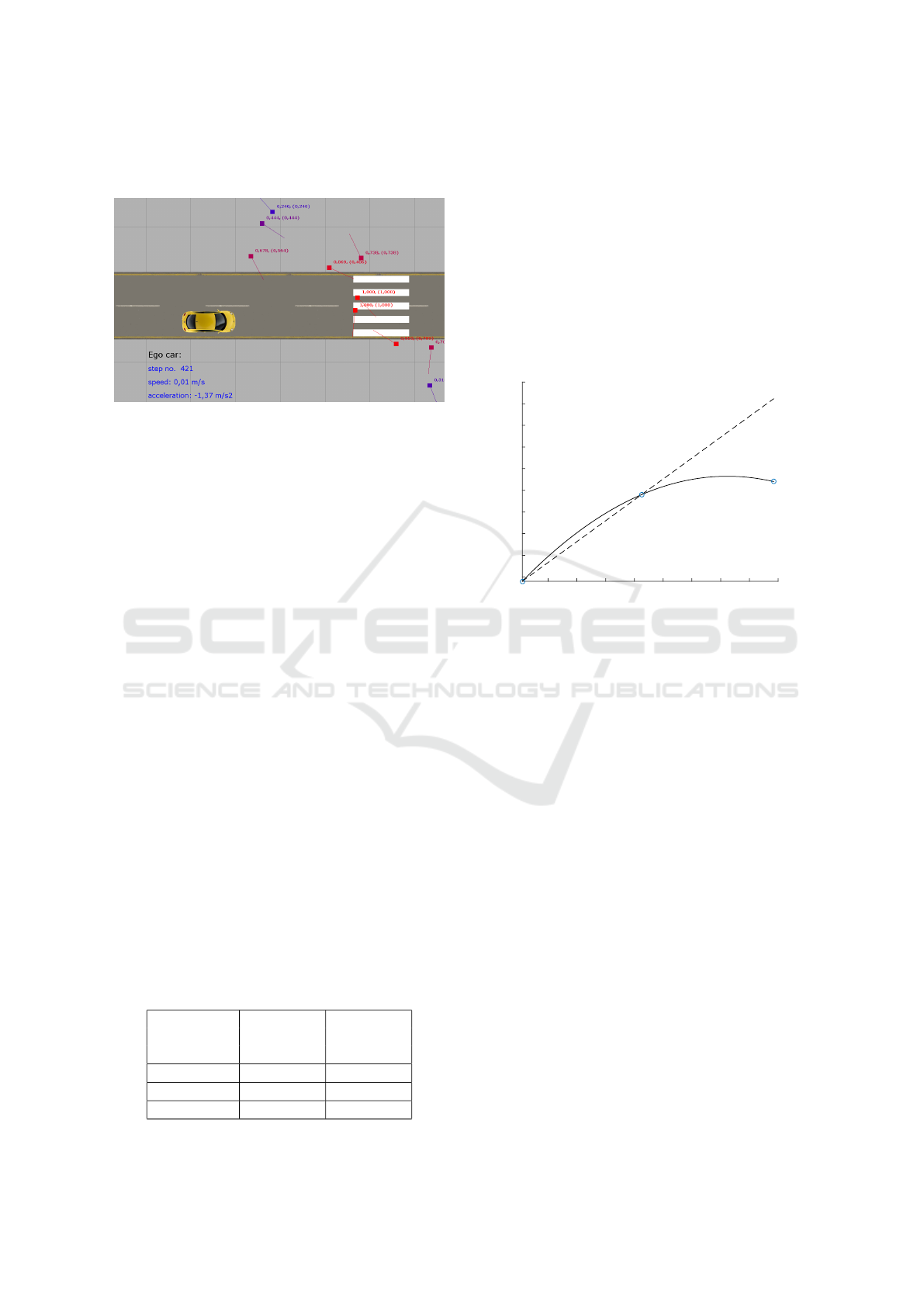
ond number represents the probability of a pedestrian
crossing the street in the current time.
Figure 6: Visualization of pedestrian intention estimation.
7 EVALUATION OF RESULTS
We implemented the reported method in Java.
We used the add-on, the probabilistic programming
language Figaro, which constitutes a Turing-complete
system. Figaro is a functional language. Bayesian
network for pedestrian intention estimation was im-
plemented in Figaro.
We evaluated the motion prediction capabilities
of methods described in this contribution. The motion
predictions were computed for three instants ahead
of the current time: one, two and three seconds.
The results for the average success rate of the pre-
dictions are presented in Table 1. It can be seen that
the one second ahead prediction using the cubic fil-
tering achieved 91.8% success rate. The success rate
for two and three seconds predictions decreased. This
is an expected result because of physics-based motion
estimation properties.The median deviation of pre-
dicted position and measured prediction for the cubic
filtering case was 1.21 meter. This was the best value
obtained when compared to the other tested filtering
methods. This simple prediction can be improved
by using more complex systems such as maneuver-
based or interaction-aware motion models. However,
these models are more time consuming, which is their
disadvantage in comparison to physics-based models.
Table 3: Consistency of predictions.
Time scope Motion Intention
(seconds) prediction prediction
error (%) error (%)
t + 1 8.2 15.4
t + 2 16.5 17.4
t + 3 25.7 17.7
The correct intention estimation of other traffic
participants is closely related to their motion predic-
tion. Thus, the other phenomenon, which we focused
on, was the influence of decreasing success of mo-
tion prediction on the pedestrian intention estimation.
The average error rates for motion prediction and
intention estimation for different time intervals are
shown in Table 3. The relationship between motion
prediction and intention estimation error rate is dis-
played in Fig. 7. The dotted line represents a trend
line that should be followed by linearly dependent
phenomena.
Motion prediction error (%)
10 12 14 16 18 20 22 24 26
Intention prediction error (%)
15.5
16
16.5
17
17.5
18
18.5
19
19.5
20
1s
2s
3s
Figure 7: The relationship between motion prediction error
and the intention estimation error.
As it can be seen, the relationship between motion
prediction and intention estimation error is not linear.
It is in fact sub-linear, i.e. a lower accuracy of motion
prediction does not affect the accuracy of intention
estimation to a large extent. Since the relationship
between motion prediction and intention estimation
is not linear, we can focus largely on improvements
in intention estimation independently of the motion
prediction.
8 CONCLUSION AND FUTURE
WORK
The traffic scenario and situation understanding
of the environment surrounding the ego-car is an im-
portant step towards a self-driving car. This task
includes motion prediction and intention estimation
of other traffic participants. For the motion pre-
diction, we used simple physics-based prediction,
which achieved satisfying results for the prediction up
to the three second look ahead time interval. If we
used the same prediction method for longer time in-
tervals, the precision dropped sharply.
The pedestrian intention estimation near zebra
Motion Prediction Influence on the Pedestrian Intention Estimation Near a Zebra Crossing
347

crossing was calculated by the proposed Bayesian
network. In this contribution, we focused on the rela-
tionship between the motion prediction and the inten-
tion estimation. We observed that these two phenom-
ena are dependent, however, the dependence is only
sub-linear. Despite the decreasing success of motion
prediction beyond 1st second, the intention estimation
was stable up to three seconds.
Our future work will aim at improvements
in the intention estimation independently on motion
prediction. We will test the success of the estimation.
We will also implement more sophisticated and com-
putationally intensive motion predictors for compari-
son.
ACKNOWLEDGEMENTS
This work was funded by the European Union H2020
Framework Programme for Research and Innovation
under the grant agreement No. 688652, UP-Drive.
Radoslav
ˇ
Skoviera and V
´
aclav Hlav
´
a
ˇ
c were also sup-
ported by the project R4I (Robotics for Industry 4.0,
No. CZ.02.1.01/0.0/0.0/15 003/0000470). The last
author received also funding from the project CAK,
Technology Agency of the Czech Republic grant No.
TE01020197.
REFERENCES
Ammoun, S. and Nashashibi, F. (2009). Real time trajec-
tory prediction for collision risk estimation between
vehicles. In Intelligent Computer Communication and
Processing, 2009. ICCP 2009. IEEE 5th International
Conference on, pages 417–422.
Armand, A., Filliat, D., and Ibaez-Guzman, J. (2014).
Ontology-based context awareness for driving assis-
tance systems. In 2014 IEEE Intelligent Vehicles Sym-
posium Proceedings, pages 227–233.
Br
¨
annstr
¨
om, M., Coelingh, E., and Sj
¨
oberg, J. (2010).
Model-based threat assessment for avoiding arbitrary
vehicle collisions. IEEE Trans. Intelligent Trans-
portation Systems, 11(3):658–669.
Gadepally, V., Krishnamurthy, A., and Ozguner, U. (2014).
A framework for estimating driver decisions near in-
tersections. IEEE Transactions on Intelligent Trans-
portation Systems, 15(2):637–646.
Gindele, T., Brechtel, S., and Dillmann, R. (2010). A prob-
abilistic model for estimating driver behaviors and ve-
hicle trajectories in traffic environments. In Intelli-
gent Transportation Systems (ITSC), 2010 13th Inter-
national IEEE Conference on, pages 1625–1631.
Gindele, T., Brechtel, S., and Dillmann, R. (2015). Learn-
ing driver behavior models from traffic observations
for decision making and planning. IEEE Intelligent
Transportation Systems Magazine, 7(1):69–79.
Hamdane, H., Serre, T., Masson, C., and Anderson, R.
(2015). Issues and challenges for pedestrian active
safety systems based on real world accidents. Acci-
dent Analysis & Prevention, 82:53–60.
Harnad, S. (1990). The symbol grounding problem. Phys-
ica, 44:335–446.
Kfer, E., Hermes, C., Whler, C., Ritter, H., and Kummert,
F. (2010). Recognition of situation classes at road in-
tersections. In Robotics and Automation (ICRA), 2010
IEEE International Conference on, pages 3960–3965.
Kooij, J. F. P., Schneider, N., Flohr, F., and Gavrila, D. M.
(2014). Context-Based Pedestrian Path Prediction,
pages 618–633. Springer International Publishing.
Kumar, P., Perrollaz, M., Lefvre, S., and Laugier, C. (2013).
Learning-based approach for online lane change in-
tention prediction. In Intelligent Vehicles Symposium
(IV), 2013 IEEE, pages 797–802.
Lef
`
evre, S., Laugier, C., and Iba
˜
nez-Guzm
´
an, J. (2013).
Intention-Aware Risk Estimation for General Traffic
Situations, and Application to Intersection Safety. Re-
search Report RR-8379, INRIA.
Lef
`
evre, S., Vasquez, D., and Laugier, C. (2014). A survey
on motion prediction and risk assessment for intelli-
gent vehicles. ROBOMECH Journal, 1(1):1–14.
Lefvre, S., Laugier, C., and Ibaez-Guzmn, J. (2012). Risk
assessment at road intersections: Comparing intention
and expectation. In Intelligent Vehicles Symposium
(IV), 2012 IEEE, pages 165–171.
M. Liebner, M. Baumann, F. K. and Stiller, C. (2012).
Driver intent inference at urban intersections using the
intelligent driver model. In Proc. IEEE Intelligent Ve-
hicles Symposium, page 11621167.
Morris, B., Doshi, A., and Trivedi, M. (2011). Lane change
intent prediction for driver assistance: On-road de-
sign and evaluation. In Intelligent Vehicles Symposium
(IV), 2011 IEEE, pages 895–901.
project-V-Charge (2011-2015). Automated Valet Parking
and Charging for e-Mobility (V-Charge). European
Commission funded project, FP7, No. 269916, 2011-
06-01 to 2015-09-30. Accessed: 2017-04-29.
Russell, S. (2015). Unifying logic and probability. Commu-
nication of ACM, 58(7):88–97.
Song, W., Xiong, G., and Chen, H. (2016). Intention-
aware autonomous driving decision-making in an un-
controlled intersection. Mathematical Problems in
Engineering, 25:775–807.
Tamke, A., Dang, T., and Breuel, G. (2011). A flexible
method for criticality assessment in driver assistance
systems. In Intelligent Vehicles Symposium (IV), 2011
IEEE, pages 697–702.
Tay, C. (2009). Analysis of Dynamic Scenes: Application
to Driving Assistance. Theses, Institut National Poly-
technique de Grenoble - INPG.
WHO (2013). Global status report on road safety: support-
ing a decade of action. World Health Organization
report.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
348
