
Deep Light Source Estimation for Mixed Reality
Bruno Augusto Dorta Marques
1
, Rafael Rego Drumond
2
, Cristina Nader Vasconcelos
1
and Esteban Clua
1
1
Universidade Federal Fluminense, Instituto de Computac¸
˜
ao, Niter
´
oi, Brazil
2
Universit
¨
at Hildesheim, Institut f
¨
ur Informatik, Hildesheim, Germany
Keywords:
Mixed Reality, Deep Learning, Light Source Estimation.
Abstract:
Mixed reality is the union of virtual and real elements in a single scene. In this composition, of real and virtual
elements, perceptual discrepancies in the illumination of objects may occur. We call these discrepancies the
illumination mismatch problem. Recovering the lighting information from a real scene is a difficult task.
Usually, such task requires prior knowledge of the scene, such as the scene geometry and special measuring
equipment. We present a deep learning based technique that estimates point light source position from a single
color image. The estimated light source position is used to create a composite image containing both the
real and virtual environments. The proposed technique allows the final composite image to have consistent
illumination between the real and virtual worlds, effectively reducing the effects of the illumination mismatch
in Mixed Reality applications.
1 INTRODUCTION
Recent advances on virtual reality platforms are al-
lowing new paradigms of interaction to emerge. In
particular, Head Mounted Displays (HMDs) have
been developed by the industry to interface with video
games and interactive simulations. The HMDs are
responsible for increasing visual immersion and pro-
vide better user experience in the simulated environ-
ment.
However, the interaction between a user and sim-
ulated environment still relies on controllers or other
unnatural hand devices such as the PlayStation Move,
HTC Vive Controller, and Oculus Touch. These de-
vices can break the user’s immersion by not allow-
ing a natural movement of the user’s hands, e.g. the
user is constrained to a limited range of movements
and gestures due to the necessity of holding the con-
troller in hand. To overcome this challenge less in-
trusive alternatives have been offered. These alterna-
tive devices seek to register the user’s movements by
a combination of sensors, such as accelerometers and
gyroscopes, or by tracking devices such as RGB-D
cameras that are able to detect body or hands move-
ments (Kinect, Leap Motion) (Marin et al., 2014; Han
et al., 2013; Zhang, 2012). However, the user is still
represented in the virtual environment as an avatar,
usually portrayed by a character that does not resem-
ble the real user appearance. Furthermore, the user
movements are usually exchanged for pre-made an-
imation sequences that significantly differ from the
user’s movement. These problems can severely break
the user immersion and impact the user experience in
Augmented and Virtual Reality.
An alternative to the usage of avatars is to in-
sert real footages of the user in the simulated envi-
ronment. This approach solves the appearance and
movement problem but introduces a new challenge,
the lighting condition between the simulated envi-
ronment and the user’s real world conditions should
match. When the lighting conditions differ, the result-
ing montage would introduce visual artifacts where
the real footage is located and it becomes obvious to
the user that his or her footages were inserted in an
artificially created environment, we call this the illu-
mination mismatch problem.
In this paper, we present a novel method to over-
come the illumination mismatch problem. The Deep
Illumination Estimation for Pervasive Systems is a
method to estimate the illumination of the user’s en-
vironment from a set of possible lighting configura-
tions. Our method provides, for the virtual environ-
ment, high-level information of the lighting condi-
tions in the user environment. This information can be
used by the interactive simulation to adapt the light-
ing conditions in the virtual environment. Our method
has the advantage of using only a single camera at-
tached, or built, in the HMD device.
Marques, B., Drumond, R., Vasconcelos, C. and Clua, E.
Deep Light Source Estimation for Mixed Reality.
DOI: 10.5220/0006724303030311
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 1: GRAPP, pages
303-311
ISBN: 978-989-758-287-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
303

Figure 1: Top left: Input RGB image capturing real world illumination conditions. Bottom left: segmented hand image.
Middle: overlay montage (real hand in a virtual scene). Right: resulting montage with adjusted light.
The hypothesis investigated in this work is
whether the dominant light source position of a scene
can be recovered from images of hands from the first-
person point of view.
To archive this goal, we train a Convolution Neu-
ral Network (CNN) to classify the input RGB image
to the corresponding lighting condition.
CNNs are used successfully for a wide range of
problems involving classification, detection and seg-
mentation of images. Recent CNN applications to
solve such problems use images of different natures,
including medical (Esteva et al., 2017; Kamnitsas
et al., 2017), natural (He et al., 2016; Xie et al., 2016),
synthetic images (Liu et al., 2016; Rajpura et al.,
2017). It is not known to the authors any work that
makes use of CNN for the recognition of illumination
in an indoor scene.
To this task, we need a large data-set with anno-
tated images for different scene illuminations. Since
there is no such data-set available and acquire such
dataset requires significant time effort, we created a
synthetic data-set. We performed experiments to test
if the CNN is capable of learning the lighting condi-
tion of acquired real images based on our synthetic
data-set.
In Virtual Reality and Augmented Reality, the en-
vironment is seen from the users perspective. This
first-person point of view implies that the most visi-
ble parts of the user’s body are his or her hands. Thus,
we focus on the hands of the user to retrieve the light-
ing information of the environment. We also consider
that most of VR applications are used in an indoor
environment, thus our method must work under this
conditions.
The main contribution of this paper is the light
source position estimation for the mixed reality that
is capable of estimating illumination properties from
a single RGB camera located in the HMD device. The
method does not require any special hardware and
can be implemented in any commercial HMD device.
Furthermore, The system is used to generate a com-
position containing the user’s hands and the virtual
environment under the correct illumination.
This article is organized as follows: In Section 2
we describe the work related to the task of lighting
recognition in real environments. In section 3 we give
general aspects of the method and the application in
augmented reality. The Sections 4 and 5 we detail
the dataset construction and network architecture, re-
spectively. In section 6 we detail the experiments and
results found. The final conclusions of the paper are
found in Section 7.
2 RELATED WORKS
Illumination estimation is important for different
tasks, including image editing and scene reconstruc-
tion. Many aspects of lighting can be recovered in-
cluding the visible spectrum of light, illuminating in-
tensity, and position of light sources.
Different techniques for illumination estimation
have been proposed based on probes and other in-
trusive objects (Calian et al., 2013), (Knecht et al.,
2012), (Debevec et al., 2012), (Debevec, 2005) that
must be inserted in the scene.
Calian et al. (Calian et al., 2013) created a 3D
printed shading probe device that directly captures the
shading of a scene. Positioning the device in the real
scene, it was possible to achieve high-performance
shading of virtual objects in the AR context.
Knecht et al. (Knecht et al., 2012) presented
a rendering method for mixed reality systems that
combines Instant Radiosity and Differential render-
ing. The environment light sources are approximated
from the image of a fisheye lens camera that captures
the surrounding illumination. Their method also re-
quires the real scene geometry reconstruction, that is
accomplished with the use of an RGB-D camera. Fur-
thermore, a tracking device is required to estimate the
pose of the camera.
Other methods require special equipment and
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
304

time-consuming processes, such as a fisheye lens and
HDR camera setup to generate an environment map
of the real environment (Pessoa et al., 2012).
These invasive methods hinder user immersion
and can not be applied in all augmented reality sce-
narios. Our work does not rely on any intrusive device
or previous setup step.
Similar to the purpose of our work, Boom et al.
(Boom et al., 2015) proposed a method to estimate
the light source position with an RGB-D camera. The
method estimates a single light source position based
on the geometry of the scene. They calculate the nor-
mals of the scene and perform a segmentation that
finds regions with similar albedo in the original RGB
image. They search for the light position that gives
the best-reconstructed image by minimizing the dis-
tance between the reconstructed and real scene image.
(Jiddi et al., 2016) addressed the problem for multiple
point light sources based on the specular reflections in
the scene. They also considered as input an RGB-D
data provided by a sensor.
In the context of Mixed Reality Applications,
(Mandl et al., 2017) estimates the illumination of the
real ambient using physical objects on the scene as
light probes. It is necessary to acquire the geometry of
the light probe objects beforehand. The lighting is es-
timated by a 5 layers Convolutional Neural Network.
They train multiple CNN’s for each camera pose, re-
sulting in plenty of trained CNN’s. They use two dif-
ferent strategies, based on the camera pose, to select
which CNN to be used in real time, interpolation and
nearest neighbors selection. The CNN output a fourth
order Spherical Harmonic constants that are used to
create a Radiance Map of the scene. This radiance
map is used to illuminate the virtual objects.
In our work, we train a single CNN to estimate
lighting, this leads to advantages over (Mandl et al.,
2017) work. Our CNN trains faster and we do not
have to select which CNN to be used at run-time. The
multiple CNN’s in (Mandl et al., 2017) learns illumi-
nation using a single object as a light probe. For every
new light probe, multiple CNN’s must be trained. We
have a single CNN that need to be trained only once
and work in any application where the user’s hands
are visible.
Several methods have been developed for the
illumination estimation of outdoor scenes (Hold-
Geoffroy et al., 2016), (Lalonde et al., 2012),
(Lalonde et al., 2010). These methods seek to esti-
mate the parameters of a sky lighting model ( Ho
ˇ
sek-
Wilkie (Hosek and Wilkie, 2012) model) that fits the
environment illumination. Most of the methods infer
parameters from shadow and shading cues, with the
exception of the method described by (Hold-Geoffroy
et al., 2016), that made use of a CNN to infer these
parameters. Since these methods are focused on an
outdoor lighting model it is not viable for indoor en-
vironments. The most common environment for play-
ing games and virtual simulations are indoor environ-
ments. Thus, our work is focused on this kind of en-
vironment.
3 OVERVIEW
In the usual AR and VR setups, users are moving
through the environment wearing an HMD device and
interacting with their hands. Most of the time the
user’s hands and forearms are visible in the image
captured by the built-in camera of the HMD device.
In our scenario, we aim to produce a montage where
those images containing the hands are inserted into
the virtual environment. Our method is independent
of the observed portion and may contain all or part of
the user’s hand, as well as the user’s forearm.
Figure 2 shows the typical pipeline of our method.
The system receives an image of the real environment,
containing all or part of the user’s hands. Since the
CNN has been trained to classify an image containing
only the user’s hands, it is necessary to segment the
image, isolating the user’s hands in the image. This
segmentation process is the second step of our algo-
rithm, as seen in Figure 2. The segmented image is
then supplied to a CNN, where classification occurs
in one of the classes of illumination. This informa-
tion is then provided to the Game Engine. The Game
Engine adjusts lighting by changing the position of
the main light source in the virtual environment.
The main light source of a scene can vary, it is
determined by the scene designer of the simulation.
The main light source for an indoor room can be rep-
resented by a single point light source. On the other
hand. the main light source for an outdoor room can
be accounted by a directional light representing the
sun.
The last step is to create a montage using the seg-
mented image and rendered virtual environment with
the adjusted lighting setting. The montage can be cre-
ated by overlapping the user’s hands image with the
virtual environment image. The HMD’s camera is lo-
cated approximately in the same position as the vir-
tual camera on the simulated environment thus the
user’s hands share the same screen position. This
pipeline must be run for each frame of the capturing
camera.
Figure 3 represent the usual VR / AR setup, the
objects that are, most of the time, in the camera’s vis-
ible area are the user’s hands and forearm. For the
Deep Light Source Estimation for Mixed Reality
305
Game Engine
Hands
segmentation
Image of the real
environment
CNN classification
Virtual environment
lighting adjustment
Hands montage
Segmented image
Illumination class
Input image
Camera feed
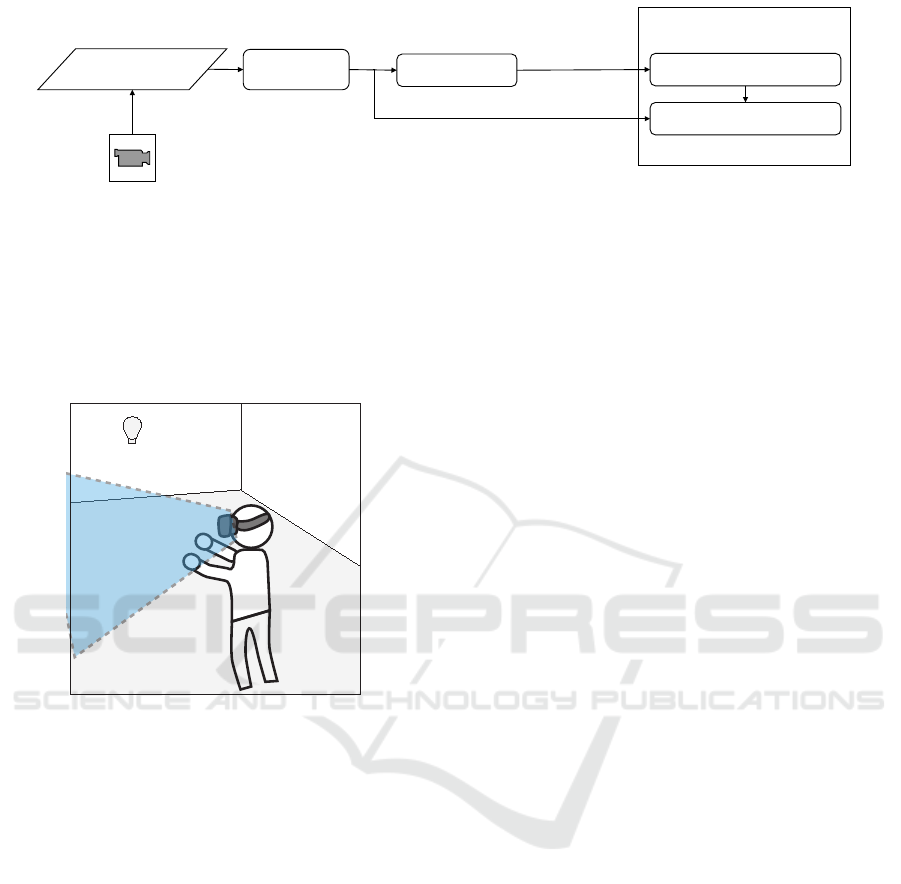
Figure 2: Lighting Estimation System Overview: typical usage: The input of the system is an RGB image containing one or
two hands. The image is segmented to extract only the skin portion of the image (User’s hands and forearms). A CNN esti-
mates the 3D position of the main light source. The position is available to the Game Engine to adjust the virtual environment
illumination.
indoor environment, a point light is used to indicate
the main light source.
Light Source
Visible Area
Figure 3: Usual VR and AR Setup. We consider the visible
area as a view frustum with a horizontal field of view of 110
degrees and vertical field of view of 100 degrees.
With the goal of representing the mostly common
environment for running mixed reality games and ap-
plications, we train a CNN to predict illumination
conditions from a single indoor image containing a
human hand. We use low dynamic range image ob-
tained from a camera positioned in the HMD device.
The camera captures the user hands illuminated by
the real scene. We suppose that the scene appearance
can be estimated from this image. The image is seg-
mented to remove the background image and feed to
a CNN that output a description of the lighting con-
dition of the scene. This information can be used
by the simulated environment to adapt the scene to
the lighting condition and create a realistic montage
of the simulated scene containing the virtual environ-
ment and the real user hands.
The description of the scene illumination contains
a position of the dominant point light source. This
3D position is located on the surface of a sphere that
was used in the creation of the database. To validate
our approach, we overlay the segmented hand image
in the virtual environment render where the dominant
light source is indicated by the scene illumination de-
scription. A typical usage for the Lighting Estimation
System is shown in the Figure 2, the process should
be executed in real time, for every frame.
4 DATASET
To train the CNN it is necessary to use a dataset com-
posed of images containing arms from a first-person
viewpoint labeled with lighting conditions. Unfortu-
nately, it is not known to the authors of this article that
such dataset exists.
In order to have a labeled dataset, we constructed
a synthetic dataset tailored for the light-estimation
problem on Mixed Reality. The data-set consists of
images containing human hands illuminated by dif-
ferent light sources. We rendered a pair of 3D mod-
eled hands inserted in a black background. The hands
consist of animated skeletal meshes performing one
of the seven animations: Grab, Idle, Jump, Punch,
Push, Sprint, Throw. There is a total of six hand mod-
els that were based on two different meshes (taking
account female and male geometry) and six materials
(used to simulate different skin colors).
The scene setup is illustrated in Figure 4. The
hand is positioned in front of the camera with an off-
set distance of 50 cm. A single point light is used to
simulate the light source. We initially positioned the
light source in front of the camera with a distance of
200 cm. The 3D hands and the camera stay stationary.
The point light source is movable.
To generate distinct lighting conditions, we need
to change the position of the point light source. Since
we are aiming to generate discretized lighting condi-
tions representing the actual conditions of lighting in
the user’s environment, we sample evenly distributed
points on the surface of a unit sphere. To accomplish
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
306

Figure 4: Scene Setup.
Algorithm 1: Lattice distribution algorithm.
1: procedure DISTRIBUTION(n) n is the number
of samples
2: o f f set ← 2.0/n
3: increment ← (3.0 −
√
5.0) ∗π
4: for i = 0 →n do
5: pointList.create() Create an empty list
6: y ← ((i ∗o f f set) −1.0) + (o f f set/2.0)
7: r ←
p
1 −y
2
8: phi ← ((i + 1) mod n) ∗increment
9: x = cos(phi) ∗r
10: z = sin(phi) ∗r
11: pointList.add(x,y, z)
12: end for
13: return pointList
14: end procedure
this goal, we choose the Fibonacci lattice distribution
(Gonz
´
alez, 2010), (Marques et al., 2013) to generate n
approximately evenly distributed points in a spherical
region. These points represent the position of a valid
point light of our dataset.
We also included a scenario with no direct inci-
dent light, where only an ambient light was used in
the renderer. We used a screen-space subsurface scat-
tering shader (Jimenez and Gutierrez, 2010) to realis-
tically simulate the skin material.
All the images were processed by applying a mo-
tion blur to simulate the frames captured by the live
camera in the real scene, the direction and amount of
blurring are calculated according to the movement of
the arms.
We also checked if at least one hand is visible in
the final image; if no hand is visible, then we discard
that image from the dataset. Later, we applied a cen-
tered crop in the images of the data-set for the purpose
of keeping the aspect ratio of the images in the CNN
training process. The resulting images are 512 pixels
wide and 256 pixels tall. Example images can be seen
in Figure 6.
Figure 5: Light Distribution. The light sources are evenly
distributed on the surface of a sphere.
Figure 6: Example images in the synthetic hand’s illumi-
nation data-set. An image in this data-set contains a first-
person view hands illuminated by a specific lighting setting.
We have created four variations of the dataset. The
difference between them is the number of lighting set-
tings: 5, 25, 50 and 100 light source position settings.
The possible positions of the light source are uni-
formly distributed over the surface of the sphere us-
ing the Fibonacci Lattice distribution. The Fibonacci
Lattice algorithm to generate n points is listed in Al-
gorithm 1.
The synthetic hand’s dataset, network model, and
trained weights are publicly available at [Omitted due
to blind review].
5 RESIDUAL NETWORK
Our method relies on image classification of lighting
conditions by the observation of human hands. Deep
Convolution Neural Networks represent the state of
Deep Light Source Estimation for Mixed Reality
307
the art methodology in several tasks related to visual
content analysis, and the topology known as Resid-
ual Convolution Neural Network (ResNet) is the lead-
ing method among the existent CNNs in several chal-
lenges. Thus, our methodology is constructed by
training a ResNet.
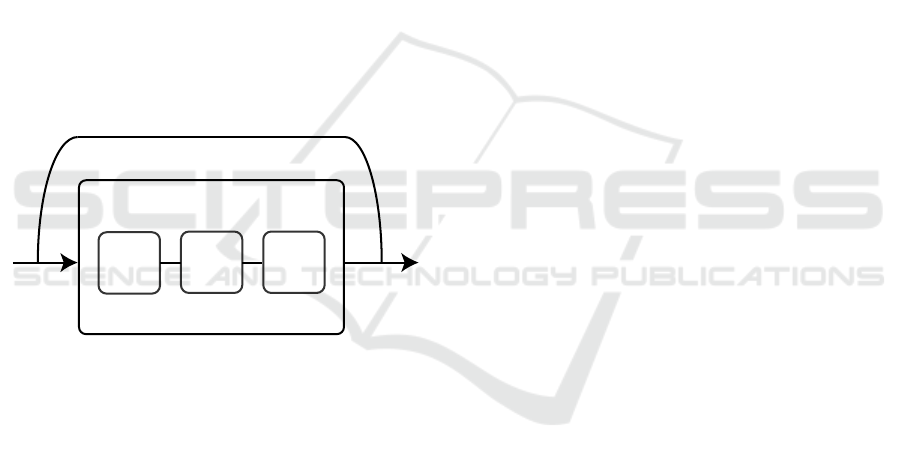
Residual networks are constructed based on the
deep residual learning framework. Its network is con-
structed by replicating a basic building block (shown
in Figure 7), that contains a set of convolution, nonlin-
ear layers and a shortcut connection that skips one or
more layers. The shortcut connections ease the train-
ing process and enable the usage of deeper networks
without the degradation of the accuracy. The short-
cut connection connects the input and the output of a
building block.
In our work, we also use a bottleneck architecture
to decrease the computational effort for the training
process. The bottleneck convolution layer reduces the
dimensionality of the input and recovers the original
dimensions in the output. This is performed by two
1x1 convolution layers placed in the building block,
the bottleneck layers are shown in Figure 7.
Convolution
1 x 1
64
+ Relu
Convolution
1 x 1
256
+ Relu
Convolution
3 x 3
64
+ Relu
Building Block
256
Shortcut Connection
Figure 7: Basic Building Block for ResNet Network.
In our system, we use a 50-layer Residual Net-
work. The construction of the network follows the
same design rules as Resnet (He et al., 2016) archi-
tectures. Table 1 depicts the overall architecture of
our residual network for each layer. The convolution
layers have a kernel size of 3x3 pixels, with the ex-
ception of the first convolution layer. To create the
50 layer network, we repeat the building blocks based
on the VGG and ResNet network (He et al., 2016; Si-
monyan and Zisserman, 2014). The repeat column of
table 1 shows the number of repetitions for each build-
ing block. The blocks are created sequentially, the
output of a previous block is connected to the input
of the next one through a Non-Linear function called
rectified linear units (ReLu). The ReLu Layer applies
a simple non-linear function f (x) = max(x, 0) for ev-
ery output in the previous layer.
6 EXPERIMENTS AND RESULTS
In order to measure the accuracy of the proposed
method, we evaluated the performance of the CNN
at predicting the main light position on the synthetic
images dataset, so that the exact position of the light
sources could be controlled. The model is trained
on four variations of the Lighting Estimation Dataset,
altering the discretization of the space considered as
possible outputs of the network.
The first discretization has 5 lighting settings vari-
ation have 2943 training images and 1133 validation
images. The final result is obtained on 451 test im-
ages. The second discretization has 25 lighting set-
tings variation have 13496 training images, 5194 val-
idation images, and 2071 test images. The third dis-
cretization considered has 50 lighting settings vari-
ation have 26676, 10269, 4099 images for training,
validation and test respectively. Finally, the last dis-
cretization considered 100 lighting settings variation
have 54471, 20965 and 8363 images for training, val-
idation, and test. We evaluate top 1 accuracy.
Our CNN models were trained starting from pre-
trained weights obtained by training the same topol-
ogy but for object classification in the ImageNet
dataset (Deng et al., 2009) and Microsoft Coco (Lin
et al., 2014). Such set of weights is public available
(He et al., 2016). This is a well-known technique,
named fine-tuning, adopted in order to reduce over-
fitting when the available dataset is small so that the
network layers benefit from training in a larger one.
For the 100 lighting settings variation, our net-
work learned 27,657,316 parameters and took a pro-
cessing time of about 10 hours.
The network variation for 50, 25 and 5 light-
ing settings learned 25.609.266, 24.585.241 and
23.541.231 parameters and took a processing time
of 5:01, 3:42, and 00:19 hours, respectively, for the
training process in the GPU.
All of the tests were performed in a machine with
the following specification: I7 4790 @ 3.6Ghz. 24
GB Ram. Nvidia Geforce Titan X.
The input of the network is of the same size as the
images on the data-set, thus having a size of 512 x
256 pixels.
The inference time for a single image is about 0.15
seconds, executed on the CPU.
The CNN output a probability distribution over
the 5/25/50/100 possible classes (lighting settings) for
each prediction. The top-1 accuracy is the accuracy
considering only the CNN output class with higher
probability.
The accuracy results can be seen on Table 2. In-
creasing the number of lighting settings implies a
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
308
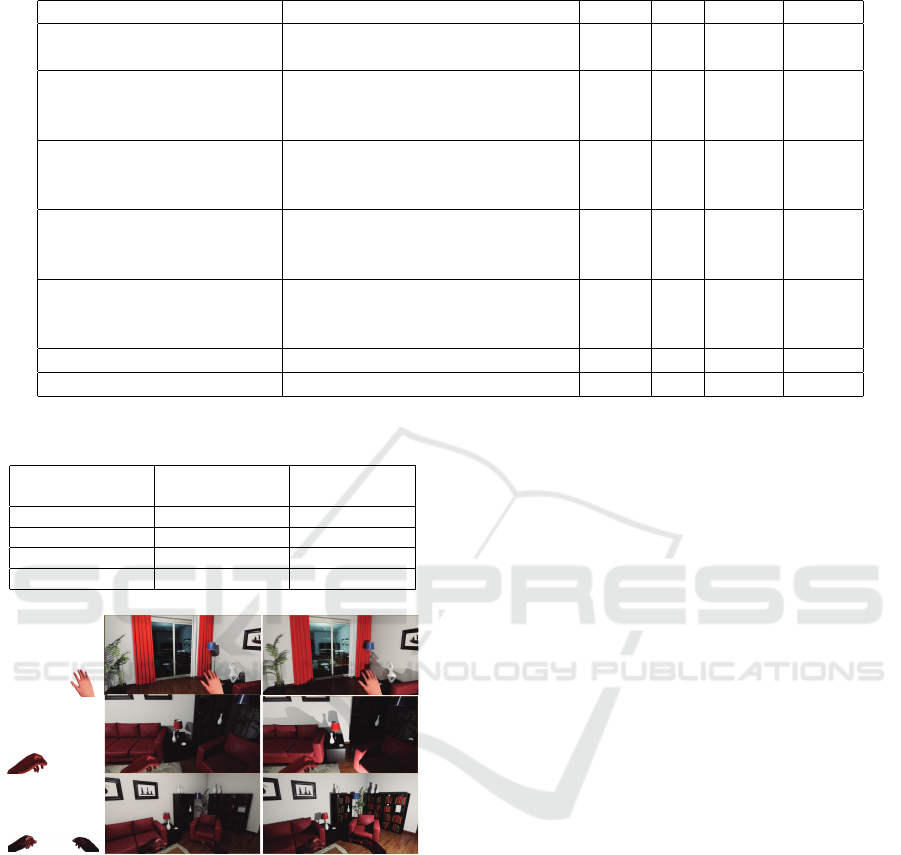
Table 1: Network Architecture.
Block Kernel Size Stride Pad Output Repeat
Convolution 1
7 x 7 Convolution
3 x 3 Max Pooling
2
2
3
0
64 1
Convolution 2
1 x 1 Convolution
3 x 3 Convolution
1 x 1 Convolution
1
1
1
0
1
0
64
64
256
3
Convolution 3
1 x 1 Convolution
3 x 3 Convolution
1 x 1 Convolution
1
1
1
0
1
0
128
128
512
4
Convolution 4
1 x 1 Convolution
3 x 3 Convolution
1 x 1 Convolution
1
1
1
0
1
0
256
256
1024
6
Convolution 5
1 x 1 Convolution
3 x 3 Convolution
1 x 1 Convolution
1
1
1
0
1
0
512
512
2048
3
Average Pooling 7 x 7 Avg. Pooling 1 0 2048 1
Fully Connected + Softmax
Fully Connected layer + Soft Max
- - 50 1
Table 2: CNN Accuracy for lighting estimation.
Lighting settings Top-1 accuracy
Training Time
(hours)
5 93.87 % 00:19
25 83.15 % 03:42
50 82.73 % 05:01
100 81.51 % 10:16
Figure 8: On the left the input images. In between montage
image without lighting adjustment. On the right montage
image with lighting adjustment.
harder problem, thus decreasing the accuracy of our
model. For the 100 lighting settings dataset, we still
accomplish a top 1 accuracy of 81.51%.
As we increase the number of lighting settings, the
difference between the estimated position decreases,
leading to more subtle differences in the final image,
as can be seen in Figure 9. While there is a big differ-
ence between the classification with 5 and 25 lighting
settings, the classification with 50 and 100 lighting
settings generates subtle differences that are hard to
be identified by the user.
To further evaluate the quality of our system, we
performed a test with the full pipeline in Figure 8.
The input images are displayed on the left side of the
figure. The input image is a human hand in an arbi-
trary position. The input image has been processed
in order to remove all content that does not belong
to the user’s hands. In the middle column of image
8 we show the environment in a random lighting set-
ting. on the right column, we show the final assembly
where the environment has its adjusted lighting con-
figuration and the overlap of the input image with the
virtual environment. These results were obtained us-
ing the trained network for 100 lighting classes.
7 CONCLUSION
We presented a point light source position estimation
system for mixed reality which is able to estimate the
light source position of a 3D scene. Different from
previous works, our system uses only a low dynamic
range camera and do not requires any additional hard-
ware or user intervention. The system is suitable for
mixed, virtual and augmented reality applications and
operates at interactive rates. We evaluate the perfor-
mance of our novel system on different user scenarios.
As future works, the proposed methodology can
be extended to retrieve descriptors of the illumination
chrominance and intensity, as well other illumination
parameters that can affect the illumination perception
realism.
Deep Light Source Estimation for Mixed Reality
309

Figure 9: CNN Lighting estimation with a different number of lighting settings. The top image is the scene illuminated by the
100 lightings settings CNN estimation. From left to right: 100 lighting settings, 50 lighting settings, 25 lighting settings and
5 lighting settings. Each column shows the color image and the difference image between the corresponding lighting setting
and the 100 lighting settings image.
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
310

ACKNOWLEDGEMENTS
The authors thank Coordenac¸
˜
ao de Aperfeic¸oamento
de Pessoal de N
´
ıvel Superior (CAPES) for the finan-
cial support of this work and Nvidia for providing
GPUs.
REFERENCES
Boom, B. J., Orts-Escolano, S., Ning, X. X., McDonagh,
S., Sandilands, P., and Fisher, R. B. (2015). Interac-
tive light source position estimation for augmented re-
ality with an rgb-d camera. Computer Animation and
Virtual Worlds.
Calian, D. A., Mitchell, K., Nowrouzezahrai, D., and Kautz,
J. (2013). The shading probe: Fast appearance acqui-
sition for mobile ar. In SIGGRAPH Asia 2013 Techni-
cal Briefs, page 20. ACM.
Debevec, P. (2005). Image-based lighting. In ACM SIG-
GRAPH 2005 Courses, page 3. ACM.
Debevec, P., Graham, P., Busch, J., and Bolas, M. (2012).
A single-shot light probe. In ACM SIGGRAPH 2012
Talks, page 10. ACM.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In Computer Vision and Pattern Recogni-
tion, 2009. CVPR 2009. IEEE Conference on, pages
248–255. IEEE.
Esteva, A., Kuprel, B., Novoa, R. A., Ko, J., Swetter, S. M.,
Blau, H. M., and Thrun, S. (2017). Dermatologist-
level classification of skin cancer with deep neural net-
works. Nature, 542(7639):115–118.
Gonz
´
alez,
´
A. (2010). Measurement of areas on a sphere
using fibonacci and latitude–longitude lattices. Math-
ematical Geosciences, 42(1):49–64.
Han, J., Shao, L., Xu, D., and Shotton, J. (2013). Enhanced
computer vision with microsoft kinect sensor: A re-
view. IEEE transactions on cybernetics, 43(5):1318–
1334.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hold-Geoffroy, Y., Sunkavalli, K., Hadap, S., Gambaretto,
E., and Lalonde, J.-F. (2016). Deep outdoor illumina-
tion estimation. arXiv preprint arXiv:1611.06403.
Hosek, L. and Wilkie, A. (2012). An analytic model for
full spectral sky-dome radiance. ACM Transactions
on Graphics (TOG), 31(4):95.
Jiddi, S., Robert, P., and Marchand, E. (2016). Reflectance
and illumination estimation for realistic augmenta-
tions of real scenes. In IEEE Int. Symp. on Mixed and
Augmented Reality, ISMAR’16 (poster session).
Jimenez, J. and Gutierrez, D. (2010). GPU Pro: Advanced
Rendering Techniques, chapter Screen-Space Subsur-
face Scattering, pages 335–351. AK Peters Ltd.
Kamnitsas, K., Ledig, C., Newcombe, V. F., Simpson,
J. P., Kane, A. D., Menon, D. K., Rueckert, D., and
Glocker, B. (2017). Efficient multi-scale 3d cnn with
fully connected crf for accurate brain lesion segmen-
tation. Medical image analysis, 36:61–78.
Knecht, M., Traxler, C., Mattausch, O., and Wimmer, M.
(2012). Reciprocal shading for mixed reality. Com-
puters & Graphics, 36(7):846–856.
Lalonde, J.-F., Efros, A. A., and Narasimhan, S. G. (2012).
Estimating the natural illumination conditions from a
single outdoor image. International Journal of Com-
puter Vision, 98(2):123–145.
Lalonde, J.-F., Narasimhan, S. G., and Efros, A. A. (2010).
What do the sun and the sky tell us about the camera?
International Journal of Computer Vision, 88(1):24–
51.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Liu, X., Liang, W., Wang, Y., Li, S., and Pei, M. (2016). 3d
head pose estimation with convolutional neural net-
work trained on synthetic images. In Image Process-
ing (ICIP), 2016 IEEE International Conference on,
pages 1289–1293. IEEE.
Mandl, D., Yi, K. M., Mohr, P., Roth, P., Fua, P., Lep-
etit, V., Schmalstieg, D., and Kalkofen, D. (2017).
Learning lightprobes for mixed reality illumination.
In 16th IEEE International Symposium on Mixed and
Augmented Reality (ISMAR), number EPFL-CONF-
229470.
Marin, G., Dominio, F., and Zanuttigh, P. (2014). Hand ges-
ture recognition with leap motion and kinect devices.
In Image Processing (ICIP), 2014 IEEE International
Conference on, pages 1565–1569. IEEE.
Marques, R., Bouville, C., Ribardi
`
ere, M., Santos, L. P.,
and Bouatouch, K. (2013). Spherical fibonacci point
sets for illumination integrals. In Computer Graph-
ics Forum, volume 32, pages 134–143. Wiley Online
Library.
Pessoa, S. A., Moura, G. d. S., Lima, J. P. S. d. M., Te-
ichrieb, V., and Kelner, J. (2012). Rpr-sors: Real-time
photorealistic rendering of synthetic objects into real
scenes. Computers & Graphics, 36(2):50–69.
Rajpura, P. S., Hegde, R. S., and Bojinov, H. (2017). Object
detection using deep cnns trained on synthetic images.
arXiv preprint arXiv:1706.06782.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2016).
Aggregated residual transformations for deep neural
networks. arXiv preprint arXiv:1611.05431.
Zhang, Z. (2012). Microsoft kinect sensor and its effect.
IEEE multimedia, 19(2):4–10.
Deep Light Source Estimation for Mixed Reality
311
