
Domain Surface for Object Scanning
Fu-Che Wu
1
, Chien-Chang Ho
2
and Andrew Dellinger
3
1
Providence University, Taichung, Taiwan
2
National Taiwan University, Taipei, Taiwan
3
Elon University, North Carolina, USA
Keywords:
Object Scanning, Domain Surface, Mesh Simplification.
Abstract:
The idea of a domain surface is presented. With this idea, an object scanning algorithm from an RGB-D
camera can get a simplified mesh. Object scanning usually consists of surface reconstruction and fusion in
two steps. Range data is native to surface construction. However, the constructed surface always requires
massive data. It is not convenient to directly apply it to another application. To fuse two surfaces correctly,
it is critical to have a precise registration of two views. A domain surface can solve the two main problems
simultaneously. For the scanned scene, the system will find some domain surface to approximate the described
surface. Thus, the object model is being simplified naturally. Traditionally, a registration problem is always
solved as a six degree of freedom transformation. Resolving a robust solution from two dependent factors
of the rotation and translation by a non-linear form is not straightforward. Usually, an iterative closest point
(ICP) algorithm is adopted to find an optimized solution. However, the solution is based on the initial guess,
and it is often trapped into a local minimum. From the normal of the mapped pair domain surface, it can
estimate the rotation matrix by a linear SVD method. After the rotation is known, the shift of the feature
points can more easily recover the translation. The idea of a domain surface is robust and straightforward for
surface reconstruction and registration. With the help of this idea, a simplified mesh constructed from range
data becomes easier.
1 INTRODUCTION
A depth camera has become popular to capture the
environment or the 3D model. However, a massive
point cloud has some issues, such as not being easy
to use for pathfinding, not being easy to attach color
texture, and having a lot of memory usage. A simpli-
fied mesh will be more suitable to relieve these prob-
lems. A mesh based object scanning algorithm using
an RGBD camera is presented. Since it is mesh based,
the result becomes easier to port to other environ-
ments or applications. During the scanning process,
a progressive mesh with texture is constructed. To
construct a mesh from depth data, generally, volume
data is used. There are many functions to extract the
surface such as a Radial basis function or a Poisson
function. Traditionally, a truncated signed distance
function is used to recode the depth map from each
scan and fuse them together. Also, many Marching
cube based algorithms can be employed to generate
the mesh from the volume data. However, the vol-
ume data still contains many vertices inherited from
the voxels structure. To obtain a simplified mesh re-
quires a different kind of algorithm.
To simplify the structure, a domain surface idea is
presented. Simplification is very critical, especially in
city modeling. Doulamis et al(Doulamis et al., 2015)
proposed a 5D Digital Cultural Heritage Model (3D
geometry plus time plus levels of details) be imple-
mented using open interoperable standards based on
the CityGML framework. With the idea of a domain
surface, the amount of data can be reduced efficiently.
A domain surface is a surface that approximates the
describing surface. A mesh constructed from the do-
main surface is simplified, stable and more reliable in
estimating the rotation for registration. To construct
a mesh structure, a general approach is based on fea-
tures to find its topological relationship. In this ap-
proach, it is not easy to determine how many features
are sufficient to describe a surface. Which topology
is a better solution? A minimal set of vertices within
the mesh made from the domain surface is feasible.
Moreover, with the concept of the dual graph, a mini-
mal set of vertices can be found.
Wu F., Ho C. and Dellinger A.
Domain Surface for Object Scanning.
DOI: 10.5220/0006730306160625
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISAPP 2018), pages 616-625
ISBN: 978-989-758-290-5
Copyright
c
2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The main idea is to segment the depth image with
a predefined candidate surface. Thus, we can parti-
tion the area into many regions which have the same
normal vector. Each region can find a domain surface
to describe such an area. Also, we will track some
features with optical flow frame-by-frame to recover
the matching relationship for two scans. With these
mapping relationships among features, the mapping
relationships of domain surfaces also can be found.
For each scan, we can locate a new domain surface
and estimate its transformation to fuse together the
scan results. A box texture is prepared. Each scan
will estimate its view position. Based on the camera
position, we will find a best-matched texture plane for
the new domain surface.
In the following, we will discuss previous work
first. Then, we will prepare the input data to find the
relationship between the depth image and color im-
age. Also, we will describe the tracking mechanism
for recovering the mapping relationship between dif-
ferent scans. Then, we will discuss the main idea in
detail: the domain surface. Finally, the transform for
each scan will be estimated for the complete fusion.
2 PREVIOUS WORK
A depth camera has many different kinds of appli-
cations. Since it can capture the 3d cloud points in
real time, it can be used for skeleton recognition and
trajectory interpretation(Alexiadis et al., 2011; Pa-
padopoulos et al., 2014; Laggis et al., 2017). Kainz
et al. (Kainz et al., 2012) use ten Kinects to place
at a different position in a room to scan an ob-
ject from different views. To reduce interference
between the Kinects, the Kinect mounts on a rod
which is equipped with vibrators. Pradeep et al.,
(Pradeep et al., 2013) instead of using Kinect to cap-
ture the depth data, utilized only a single, off-the-shelf
web camera as the input sensor. They then perform
efficient variable-baseline stereo matching between
the live frame and a previously selected key frame.
Their stereo matcher creates a dense depth map per
frame, which is then fused volumetrically into a sin-
gle implicit surface representation. Ondruvska et al.
(Ondr
´
u
ˇ
ska et al., 2015) used a similar technique but
developed it on a mobile phone. Salas-Moreno et
al. (Salas-Moreno et al., 2013) demonstrated real-
time incremental simultaneous localization and map-
ping (SLAM) in large, cluttered environments, in-
cluding loop closure, relocalization and the detection
of moved objects, and of course the generation of an
object level scene description with the potential to en-
able interaction. Zollhofer et al. (Zollh
¨
ofer et al.,
2014) presented a combined hardware and software
solution for markerless reconstruction of non-rigidly
deforming physical objects with arbitrary shape in
real-time.
The usefulness of an RGBD camera with Kinect-
Fusion (Newcombe et al., 2011) is limited by GPU
memory capacity for a large scale environment. This
problem has wide-ranging implications in practi-
cal applications since KinectFusion scans a three-
dimensional scene in real-time, which is important for
an augmented reality application. The problem stems
from the data recorded from the truncated signed dis-
tance function for supporting the tracking and map-
ping algorithm. There has been a lot of advanced
research (Whelan et al., 2012; Whelan et al., 2013;
Nießner et al., 2013; K
¨
ahler et al., 2015) to solve
KinectFusion’s huge memory consumption problem.
Chen et al. (Chen et al., 2013) addressed the fun-
damental challenge of scalability for real-time, volu-
metric surface reconstruction methods. They design a
memory efficient, hierarchical data structure for com-
modity graphics hardware, which supports the live re-
construction of large-scale scenes with fine geometric
details. Zeng et al. (Zeng et al., 2013) used an Oc-
tree structure to process the data. Keller et al(Keller
et al., 2013) used the same approach as KinectFusion,
but their data structure is a set of 3D cloud points to
avoid the limitation of the distance field. Lefloch et
al. (Lefloch et al., 2015) also used a similar approach
but primarily focused on the anisotropic problem.
We want to use a mesh-based object scanning al-
gorithm, which will be more memory efficient. Scan-
ning with a mesh structure has many advantages:
smaller memory footprint, natural mesh generation
with color texture, data sent directly to a 3D printer,
and most importantly data suitability for a robotic-
coordinated application. The system can identify an
object’ s position and its dimensions. Then a robot
arm will easily grasp or do some operations on the
object.
To estimate a planar area, labeling or segmenta-
tion is very important. Eigen and Fergus (Eigen and
Fergus, 2015) address three different computer vision
tasks using a single multiscale convolutional network
architecture: depth prediction, surface normal estima-
tion, and semantic labeling. We believe that a planar
area shares some kind of consistent information.
A planar surface represents a particular region that
will not be so sensitive to noise, and it recently re-
ceived some attention as a registration tool. Papazov
et. al.(Papazov et al., 2015) present a novel trian-
gular surface patch (TSP) descriptor, which encodes
the shape of the 3D surface of the face within a tri-
angular area. The proposed descriptor is viewpoint

invariant, and it is robust to noise and to variations
in the data resolution. Using a fast nearest neighbor
lookup, TSP descriptors from an input depth map are
matched to the most similar ones that were computed
from synthetic head models in a training phase. The
matched triangular surface patches in the training set
are used to compute estimates of the 3D head pose
and facial landmark positions in the input depth map.
The surface patch is about a neighborhood relation-
ship. Topology also is a good hint for matching. Choi
and Christensen (Choi and Christensen, 2016) present
the color point pair feature which enables the voting-
based pose estimation to be more efficient. For find-
ing the best matching pair, a hash key is used to min-
imize the search space.
3 PRELIMINARY PREPARATION
For object scanning, a prior segmentation of the ob-
ject from the input data would be helpful for the fol-
lowing processes. There are many foreground seg-
mentation algorithms, such as Graph Cut. In our im-
plementation, a RealSense camera is used. In an Intel
provided SDK, the blob tracking mechanism can ac-
cess the foreground more easily.
Since the IR camera and RGB camera are not in
the same location, there exists a translation between
the two cameras. To bind the depth and color infor-
mation together, we will rebuild the depth map on the
RGB camera’s coordinate. It is straight to translate
a point in the depth map into the RGB camera’s co-
ordinate. However, the unwanted aliasing effects in
the depth value become worse when the depth value
is translated into another coordinate that will let many
pixels lose its depth value in the new map. The effect
generates grid noise, just as Figure 1 shows, and lets
the following computation become unstable. To deal
with this situation, a backcheck mechanism is used to
recover the lost depth pixels. Since a pixel in the RGB
image will form an Epipolar line on the depth map,
thus we can search its corresponding depth value on
this line. Firstly, we will search its neighboring pix-
els to find a depth value as its initial value that has
the maximal possibility for the missing pixel. Based
on the initial guess value, we will compare its depth
value iteratively on its Epipolar line until the differ-
ence between the estimated and the corresponding
depth is under a threshold.
After the depth map is constructed, a normalized
depth map can be built by scaling the nearest and far-
thest pixels among the silhouette area. A normalized
depth map is shown in Figure 1. With it, we can cal-
culate a curvature map and find some useful features
Figure 1: (a) Grid noise pattern (b) A normalized depth
map.
for transform recovery.
To gather suffusion features on the model, prim-
itive features are collected such as a texture feature
from the captured color image, and curvature from
the depth image. These features are extracted with
the Speeded Up Robust Features (SURF) algorithm.
If we update each feature as a vertex on the mesh
for each frame, it will produce too many vertices.
To avoid a point cloud, only the frame that has a
large transform can create new vertices in the exist-
ing mesh. A fast evaluation is to check the distance
of the trajectory from the texture tracking whether the
moving is larger than a predefined value or not. The
value is noted as the density parameter. If the crite-
rion is met, that means it is suitable to initialize a new
update.
To track the movement of the feature points,
a general technique is to use the optical flow.
OpenCV provides all these in a single func-
tion, cv2.calcOpticalFlowPyrLK(). To decide
which points are suitable for tracking, we use
cv2.goodFeaturesToTrack(). To use the function
cv2.calcOpticalFlowPyrLK(), we pass the previous
frame, previous points, and next frame as the input pa-
rameters. It returns the next points along with some
status numbers. If its value is one, that means the
next point is found. Otherwise, its value is zero. Iter-
atively, we pass these points as previous points in the
next step.
In the beginning, the tracking mechanism detects
some SURF feature points on the first frame. The cal-
cOpticalFlowPyrLK() function then is used to track
those points which implements the Lucas-Kanade op-
tical flow. To improve the robustness of the tracking
result, backtracking is applied to check these points
still are the tracking pair from the next frame to the
previous frame. Figure 2 shows there are some false
tracking points already deleted by the backtracking
mechanism.

Figure 2: Backtracking.
4 SEGMENTATION
To get a simplified mesh directly from the scanned
data, we want to find the planar area first. Taylor and
Cowley (Taylor and Cowley, 2013) use planar area to
identify the wall structure. They use edge detection
and Delaunay triangulation to locate a planar candi-
date. Then, the depth samples associated with each
of the image regions are passed to a RANSAC rou-
tine which is used to recursively divide the point set
into planar regions. Hemmat (Hemmat et al., 2015)
et al. also use edge detection to find a region and test
different directions to determine whether their neigh-
borhood is on the same plane or not. Bokaris et al.
(Bokaris et al., 2017) is also similar to Taylor’s ap-
proach, but has better parameters to improve the re-
sult.
An input image may consist of many regions
which are on the same plane. To determine which
pixels belong to the same plane, usually, a RANSAC
algorithm is used. Since a planar area shares the same
normal direction, if we can segment the pixels by
their normal direction, then it will be easier to find
the plane. However, this simple idea does not work
correctly. For example, the input image is two planes
as Figure 3 shown. Since the depth value has a quan-
tization error, we have tried different kernel size of
boxes to calculate its mean value to estimate its nor-
mal vector. A larger kernel size can get a smoother
Figure 3: Two planes shown on the input depth and RGB
images.
result. However, the results are still not good as Fig-
ure 4 shown. Because the initial target normal can not
be estimated exactly always, some pixels may belong
to a normal vector and others may belong to another
vector. Thus, the distribution becomes unstable.
To solve the instability problem, a method similar
to the RANSAC algorithm is used. A mask is con-
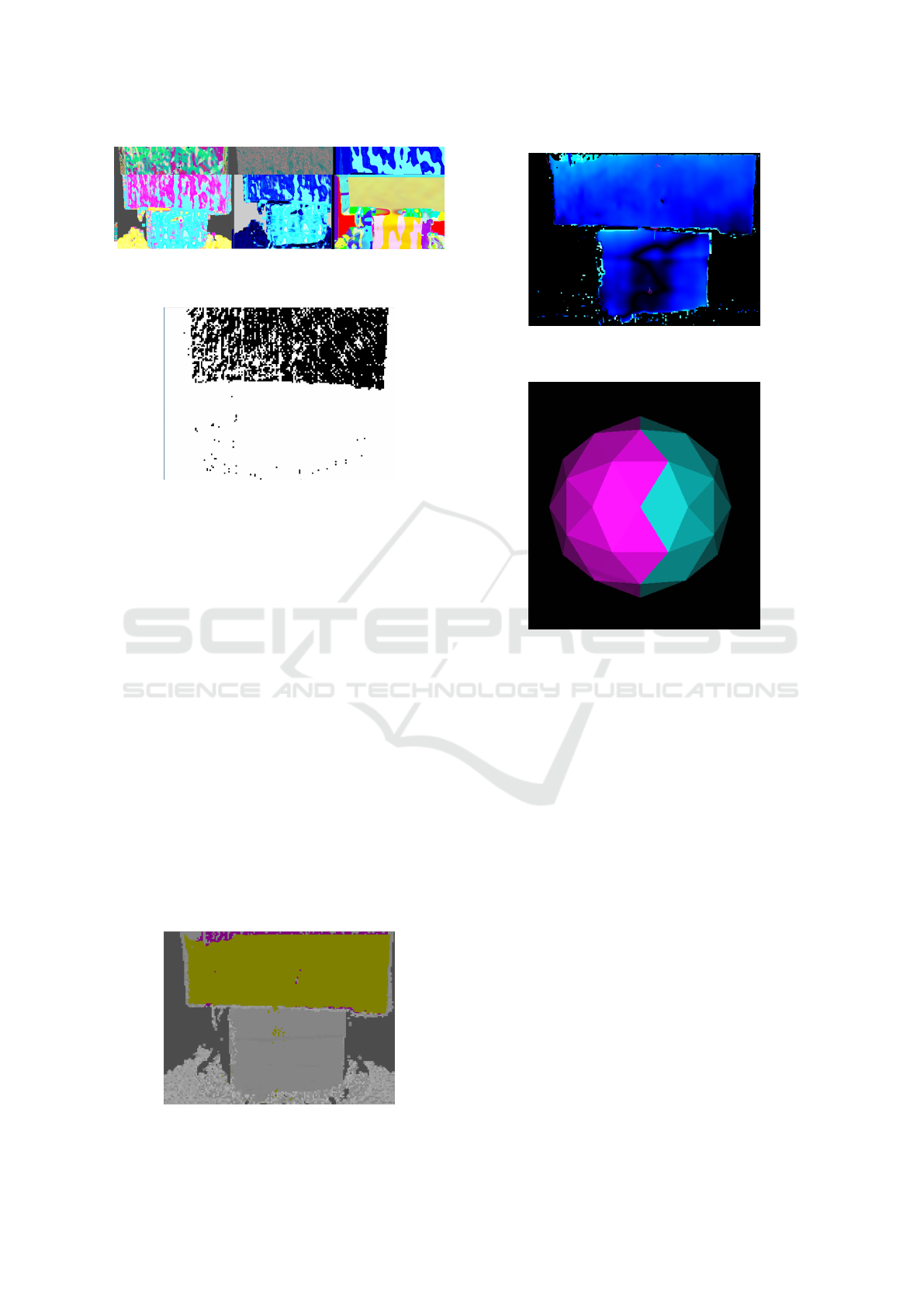
Figure 4: Plane detection is not a stable event with different
sizes of kernel boxes.
Figure 5: A mask represents the pixels that have the com-
mon normal vector.
structed to indicate which pixels that belong to the
same plane can be used to estimate the fitted plane.
The Figure 5 shows the mask. After the parameters
of the plane are estimated, we can check each pixel to
determine whether it belongs to the plane or not. To
label each pixel to a suitable plane, we will calculate
an approximated error by accumulating the distance
from its neighboring pixels to the target plane. If we
only compare the distance, the intersecting area from
another plane also will become a good candidate. To
avoid this situation, we also need to make sure the
variation of the normal vector is similar. The labeling
result is shown on the figure 6. The error between the
estimated plane and the 3d point from the depth im-
age is shown on the Figure 7. The maximal error is
5mm. The average error is 2 mm.
A curved surface is very different from a planar
surface. The normal vectors of a planar area are the
same or very similar. However, the normal vectors
of a curved area have many differences. Most are
not the same everywhere. Thus, we want to employ
Figure 6: Labeling the pixels belonging to a target plane.
Figure 7: The error between the estimated plane and 3d
points from the depth image.
Figure 8: A subdivision of an Icosahedron is used as an
initial pattern for labeling.
a few planes as first patterns to label a depth image
for segmentation. A normal vector from the subdivi-
sion of an Icosahedron is used as the initial pattern as
shown in Figure 8. There are forty triangles for the
half sphere. The angle between the normal vectors of
neighboring triangles is about eighteen degrees.
A mesh structure consists of vertices, edges, and
faces. A vertex determines the geometricsl infor-
mation. An edge is for the topological information.
Mesh simplification usually is either by the vertex
decimation method or by the edge collapse approach.
Our approach is trying to minimize the surface num-
ber as much as possible. However, these planes also
are constrained by vertices and edges. Thus, a min-
imal set of vertices are recovered from the domain
graph’s dual graph. To make sure the planar plane
can describe the surface well, tolerance is defined as
follows. Let shape S be described by a mesh M under
a tolerance T . If a point p belongs to a shape S, then
the distance from p to mesh M should be less than T .
To find a minimal set of planes to describe a tar-
get surface, a set of primitive planes is defined first.
Since all the surfaces face the camera, a half part of a
subdivided icosahedron is suitable as the first planes.
For stabilization, each pixel estimates its normal vec-

Figure 9: Depth map is segmented by a minimal set of
planes.
Figure 10: The error between an estimated plane and the
depth image for a curved surface.
tor from a seven-by-seven box by comparing the an-
gle between its normal vectors to find the best, fittest
primitive plane. Thus, the scanned image can be seg-
mented by labeling with different primitive planes.
For each segmented region, we can find its best-fitted
plane. The segmented image is shown in Figure 9.
The error between an estimated plane and the depth
image for a curved surface is shown on Figure 10.
5 DOMAIN SURFACE
To find the intersection of two planes, their neighbor-
hood relationship must be defined first. For easy iden-
tification of the neighborhood relationship, a Dual
graph is constructed from a primitive graph. To con-
struct such a graph, we will find some domain nodes
first. A domain node represents a critical area in
which every pixel approximates a plane. After an ap-
proximated plane is estimated, each pixel around its
neighbor area will determine whether it belongs to
this plane or not by a predefined threshold. All the
pixels belonging to this plane will form a boundary. A
domain shape is defined, and this shape can determine
some domain nodes. We want to find some positions
that are stable and not so sensitive to shape noise. A
domain connected graph seems a good candidate (Wu
Figure 11: The shape shrink into a global optimized posi-
tion even when the shape is very noise.
et al., 2006). It consists of domain nodes. There is
an edge between two domain nodes if there exists a
neighbor relationship.
A domain node is an energy balance position. A
position inside a shape will receive a repulsive force
from its boundary and other domain nodes. A con-
figuration of the boundary will generate a repulsive
force field for such a shape. We want to construct a
function that has only one global minimal point in a
convex shape. Thus, a repulsive force field is defined
as F(x) =
R
~r
r
n
dθ, where r is the distance from x to
the boundary in the direction~r, and a discrete form is
F(p) =
∑
0≤θ<2π
~u
θ
kpk
n
, (1)
where ~u
θ
is a unit ray with different angles. When
n → ∞, the repulsive force field is dominated by the
shortest distance d(x), and thus f (x) ∝ d(x). In some
sense, n is a term for a smoothing effect. Each po-
sition receives more boundary influence for a smaller
n.
Let each edge of the shape as an initial position
move to an energy balance position iteratively based
on the repulsive force field. Finally, the node will
shrink into a global optimized position that is a do-
main node. Each domain node can generate a max-
imum inscribed circle. This circle will become a
new boundary to reconstruct a repulsive force field.
Then, we can find all the domain nodes until its ra-
dius smaller than a pre-defined value. The shrinking
process is shown in Figure 11.
Each domain surface maintains a block of the
area. To calculate this area, we will find its boundary.
Its boundary is determined by its neighborhood rela-
tionship. Each pixel is labeled with a different code to
represent that it belongs to different domain surface.
Then, we can know to which other surfaces a domain
surface connects. For each pixel on the boundary of
the domain shape, we will check the variation of its
depth or normality among its neighboring pixels to
determine if this point is a continue pixel. If the vari-

ation of depth and normal both are smaller than a pre-
defined constraint, it is a continue pixel. Otherwise,
it is a discrete pixel. Based on the shrinking path on
the domain shape, each boundary segment belongs to
whichever domain node can be determined. Thus, a
continue pixel means that it belongs to two different
domain nodes at its different sides. Also, it means
that the two domain nodes have a neighborhood re-
lationship. A neighborhood edge will be constructed
between the two domain nodes. In other words, for
two neighbor domain surfaces, we can find an inter-
section line between these surfaces.
After a domain connected graph is constructed,
each face of the graph helps create vertices. A node
represents a domain face. Thus, a triangle means
that there exists an intersection point of these domain
faces. After traversal of all faces of this graph, we can
construct a list of vertices.
With these vertices, we can refine the boundary
of each domain node. If the boundary is a discrete
edge, then the edge remains unchanged, but if it is a
continuous edge, it will be replaced by a new edge to
connect from the pool of vertices.
If there is a new scan, we should fuse two con-
structed meshes together. Usually, the portion near
the silhouette area is not stable because some of its
neighbors are in the invisible area. For stabilization
reasons, a continuous area should keep its area to at
least a fixed minimum size. A new area will add new
vertices and new edges to the old mesh.
6 REGISTRATION
Pose estimation is an important issue for object scan-
ning or robotic applications. Particularly for object
scanning, the pose is necessary information to fuse
different viewpoints into an integrated model. Mer-
rell et al(Merrell et al., 2007) advocate a two-stage
process in which the first stage generates potentially
noisy, overlapping depth maps from a set of calibrated
images and the second stage fuses these depth maps
to obtain an integrated surface with higher accuracy,
suppressed noise, and reduced redundancy.
With a depth camera, the 3d cloud points become
more accessible to capture. Traditionally, there are
two types of approaches. One is based on a set of
known 3d points and their corresponding 2d projec-
tions in the image. It is called the perspective-n-
point (PnP) method. Another type computes the best
matching position by an iterative approach to adjust
to the closest pose. It is called the iterative closest
points(ICP) method.
However, since the estimation of the matching
pairs usually is error-prone, usually massive points
are used to minimize the effect of errors. Some-
times, false matching will produce a huge error. To
remove such outlier effects, the RANSAC (Random
Sample Consensus) Algorithm with an iterative ap-
proach finds a better fitting. In fact, pose estimation
still does not quickly get a robust result in different
situations. Practically solving this problem, a pre-
calibrated camera array in an environment is more
feasible to recover the pose in different positions. The
other solution may work with the help of an inertial
measurement unit (IMU) to improve the precision.
A specific area scanned at i-th time forms a do-
main surface f
i
combined with a region R
i
and a local
transform M
i
. The surface finally will transform into
world coordinates and fuse the global model together.
An array of vertices V
i
is used to describe a region R
i
.
A function f (x)
i
= n
i
x + d
i
where n
i
is a normal
vector and d
i
is constant item. A region R
i
may consist
of domain node c
k
and f (c
k
)
i
= 0.
A global model is
G = ∪M
i
× R
i
(2)
We need to find at least one motion pair whose
distance is larger than the density check. If a large
transform is found, a pose estimation algorithm will
be used to estimate the object’s pose. To com-
pare different poses, the traditional approach is to
compare shape similarity by calculating the distance
from the depth pixel to the mesh surface, defined as
∑
x
i
d(x
i
,S). Thus, the cost function
E(R,T ) =
∑
x
i
d(Rx
i
+ T, S) (3)
is to be minimized to estimate its transform. How-
ever, in our experiments, the solution is not so robust,
especially in large transform case.
Thus, we will find the paired domain surfaces to
estimate the transformation. By the feature tracking
mechanism, a set of paired features can be used to de-
termine the mapping relationship between the domain
surfaces. Assume that surface f
i
contains feature p
x
and surface f
j
contains feature p
y
. If features p
x
and
p
y
are a mapped pair, then surfaces f
i
and f
j
also are a
mapped pair. Then, we can estimate the rotation ma-
trix from the mapped domain surface. Let the normal
vector of the mapped domain surface be n
1
,n
2
...n
i
and n
0
1
,n
0
2
...n
0
i
, respectively. Similar to Sorkine and
Alexa’s research(Sorkine and Alexa, 2007), there ex-
ists a rotation matrix R such that n
0
j
= R × n
j
. To find
such a rotation matrix R, we need to minimize
E =
∑
j=1...i
kn
0
j
− R × n
j
k
2
(4)
=
∑
j=1...i
(n
0
j
− R × n
j
)
T
(n
0
j
− R × n
j
) (5)

=
∑
j=1...i
(n
0
j
)
T
n
0
j
− 2(n
0
j
)
T
R(n
j
) + n
T
j
n
j
(6)
The terms that do not contain R are constant in
the minimization and therefore can be dropped. Thus
remains
argmin
R
∑
j
−2(n
0
j
)
T
R(n
j
) (7)
= argmax
R
∑
j
(n
0
j
)
T
R(n
j
) (8)
= argmax
R
(R × Tr(
∑
j
n
j
n
0
j
)) (9)
Let S = Tr(
∑
j
n
j
n
0
j
), It is well known that the ro-
tation matrix R maximizing Tr(RS) is obtained when
RS is symmetric positive semi-definite.
One can derive R from the singular value decom-
position of S = UΣV
T
:
R = VU
T
, (10)
up to changing the sign of the column of U cor-
responding to the smallest singular value, such that
det(R) > 0. After the rotation matrix is determined,
the translation can be obtained by calculating the shift
of feature points.
Here we make a comparison among the PNP, ICP
and domain surface approaches. For different trans-
formations, try to find which approach is more robust
and efficient.
7 FUSION
To construct the mesh, a Delaunay triangulation is ap-
plied from the projection plane of the viewpoint, and
the connection of the vertices also can be extended
into three-dimensional space. Each new pose may
create new features that will be added to the exist-
ing mesh. When updating the mesh, each extracted
feature also will compare its distance error to the tol-
erance threshold to determine whether it will be dis-
carded, merged or inserted. When updating the mesh,
each extracted feature also will compare its distance
error to the tolerance threshold. If the distance error
is reasonable and this feature point is far away from
an existing vertex, this feature point will be discarded.
If this feature point is close to an existing vertex, the
vertex position can be updated with a weighted mech-
anism.
P(x) = W ∗ p(X) + w ∗
p(x)
(W +w)
, where p(x) repre-
sents the position of vertex x. Each vertex also main-
tains a weighted value W . Each update also will
change the weight to W = W + w .
If the error is large, that means this feature can
construct a new vertex. If this feature is located out-
side of this mesh, it can be inserted to connect with
the mesh’s boundary vertexes. If this feature is lo-
cated inside the mesh, edges around this new feature
will be checked to delete unsuitable edges. Then, this
vertex can be inserted into the mesh.
Since we focus on object scanning, the texture
map is assumed to be a cubic map. When the first
frame creates the mesh, a virtual box around the ob-
ject is also created and the color image will be the
front texture. The u-v relationship also can be found
in accordance with the triangulation result. Each tri-
angle will find its best projection plane on the virtual
box. A new update frame also will find its best pro-
jection plane to update, and only if the view angle
is closer to the center of the projection plane will its
color image replace the existing frame as the new tex-
ture. All the triangles belonging to that plane need to
update their u-v relationship by projecting their posi-
tion according to that view’s transform.
To fuse two meshes into an integrated mesh, a fu-
sion boundary will be located first. Let τ
a
,τ
b
be a set
of features that respectively belong to a mesh M
a
,M
b
,
where M
a
is the integrated mesh and M
b
is a con-
structed mesh by a new frame. For a particular view,
part of the boundary of M
a
called B
a
will divide τ
b
into two sets τ
in
b
,τ
out
b
. Also, τ
a
can be divided into two
sets τ
in
a
,τ
out
a
by the mesh M
b
in the view. B
a
,B
b
are the
fusion boundaries on the mesh M
a
,M
b
respectively.
In our experience, pose estimation is very impor-
tant. A poor estimation will produce a bad result or
even a mistake. Thus, we need to set a tolerance value
to control the allowable error. The tolerance threshold
cannot be set too low; otherwise, the system will fre-
quently be interrupted because the system cannot get
a good fit to the current model. In general, with our
approach, we can get a textured object model imme-
diately and easily.
8 CONCLUSION
In the beginning, we try to construct the mesh from
features. We want to find some invariant features
as candidates and find their topological relationship
with Delaunay triangulation. However, silhouette fea-
tures provide an abundance of information, which
also makes it too noisy. Besides, Delaunay triangu-
lation may not fit the variation of depth data. With
the idea of a domain surface, the number of faces be-
comes as few as possible. From the variation of the
mapped area, it is more stable to recover the rotation
transformation. The rigid transformation then can be

divided into the rotation part and the translation part,
and they can be calculated separately. This approach
makes the solution more robust.
ACKNOWLEDGEMENTS
This work was supported in part by the Ministry of
Science and Technology, Taiwan, R.O.C., under grant
no. MOST 106-2221-E-126-011.
REFERENCES
Alexiadis, D. S., Kelly, P., Daras, P., O’Connor, N. E.,
Boubekeur, T., and Moussa, M. B. (2011). Evaluat-
ing a dancer’s performance using kinect-based skele-
ton tracking. In Proceedings of the 19th ACM inter-
national conference on Multimedia, pages 659–662.
ACM.
Bokaris, P.-A., Muselet, D., and Tr
´
emeau, A. (2017). 3d
reconstruction of indoor scenes using a single rgb-d
image. In 12th International Conference on Computer
Vision Theory and Applications (VISAPP 2017).
Chen, J., Bautembach, D., and Izadi, S. (2013). Scalable
real-time volumetric surface reconstruction. ACM
Transactions on Graphics (TOG), 32(4):113.
Choi, C. and Christensen, H. I. (2016). Rgb-d object pose
estimation in unstructured environments. Robotics
and Autonomous Systems, 75:595–613.
Doulamis, A., Doulamis, N., Ioannidis, C., Chrysouli,
C., Grammalidis, N., Dimitropoulos, K., Potsiou, C.,
Stathopoulou, E. K., and Ioannides, M. (2015). 5d
modelling: an efficient approach for creating spa-
tiotemporal predictive 3d maps of large-scale cul-
tural resources. ISPRS Annals of the Photogramme-
try, Remote Sensing and Spatial Information Sciences,
2(5):61.
Eigen, D. and Fergus, R. (2015). Predicting depth, surface
normals and semantic labels with a common multi-
scale convolutional architecture. In Proceedings of the
IEEE International Conference on Computer Vision,
pages 2650–2658.
Hemmat, H. J., Pourtaherian, A., Bondarev, E., et al. (2015).
Fast planar segmentation of depth images. In Im-
age Processing: Algorithms and Systems XIII, volume
9399, page 93990I. International Society for Optics
and Photonics.
K
¨
ahler, O., Prisacariu, V. A., Ren, C. Y., Sun, X., Torr, P.,
and Murray, D. (2015). Very high frame rate vol-
umetric integration of depth images on mobile de-
vices. IEEE transactions on visualization and com-
puter graphics, 21(11):1241–1250.
Kainz, B., Hauswiesner, S., Reitmayr, G., Steinberger, M.,
Grasset, R., Gruber, L., Veas, E., Kalkofen, D., Se-
ichter, H., and Schmalstieg, D. (2012). Omnikinect:
real-time dense volumetric data acquisition and appli-
cations. In Proceedings of the 18th ACM symposium
on Virtual reality software and technology, pages 25–
32. ACM.
Keller, M., Lefloch, D., Lambers, M., Izadi, S., Weyrich, T.,
and Kolb, A. (2013). Real-time 3d reconstruction in
dynamic scenes using point-based fusion. In 3DTV-
Conference, 2013 International Conference on, pages
1–8. IEEE.
Laggis, A., Doulamis, N., Protopapadakis, E., and Geor-
gopoulos, A. (2017). a low-cost markerless track-
ing system for trajectory interpretation. ISPRS-
International Archives of the Photogrammetry, Re-
mote Sensing and Spatial Information Sciences, pages
413–418.
Lefloch, D., Weyrich, T., and Kolb, A. (2015). Anisotropic
point-based fusion. In Information Fusion (Fusion),
2015 18th International Conference on, pages 2121–
2128. IEEE.
Merrell, P., Akbarzadeh, A., Wang, L., Mordohai, P.,
Frahm, J.-M., Yang, R., Nist
´
er, D., and Pollefeys,
M. (2007). Real-time visibility-based fusion of depth
maps. In Computer Vision, 2007. ICCV 2007. IEEE
11th International Conference on, pages 1–8. IEEE.
Newcombe, R. A., Izadi, S., Hilliges, O., Molyneaux, D.,
Kim, D., Davison, A. J., Kohi, P., Shotton, J., Hodges,
S., and Fitzgibbon, A. (2011). Kinectfusion: Real-
time dense surface mapping and tracking. In 2011
10th IEEE International Symposium on Mixed and
Augmented Reality, pages 127–136.
Nießner, M., Zollh
¨
ofer, M., Izadi, S., and Stamminger,
M. (2013). Real-time 3d reconstruction at scale us-
ing voxel hashing. ACM Transactions on Graphics
(TOG), 32(6):169.
Ondr
´
u
ˇ
ska, P., Kohli, P., and Izadi, S. (2015). Mo-
bilefusion: Real-time volumetric surface reconstruc-
tion and dense tracking on mobile phones. IEEE
transactions on visualization and computer graphics,
21(11):1251–1258.
Papadopoulos, G. T., Axenopoulos, A., and Daras, P.
(2014). Real-time skeleton-tracking-based human ac-
tion recognition using kinect data. In MMM (1), pages
473–483.
Papazov, C., Marks, T. K., and Jones, M. (2015). Real-time
3d head pose and facial landmark estimation from
depth images using triangular surface patch features.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 4722–4730.
Pradeep, V., Rhemann, C., Izadi, S., Zach, C., Bleyer,
M., and Bathiche, S. (2013). Monofusion: Real-time
3d reconstruction of small scenes with a single web
camera. In Mixed and Augmented Reality (ISMAR),
2013 IEEE International Symposium on, pages 83–88.
IEEE.
Salas-Moreno, R. F., Newcombe, R. A., Strasdat, H., Kelly,
P. H., and Davison, A. J. (2013). Slam++: Simulta-
neous localisation and mapping at the level of objects.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1352–1359.
Sorkine, O. and Alexa, M. (2007). As-rigid-as-possible sur-
face modeling. In Symposium on Geometry process-
ing, volume 4.

Taylor, C. J. and Cowley, A. (2013). Parsing indoor scenes
using rgb-d imagery. In Robotics: Science and Sys-
tems, volume 8, pages 401–408.
Whelan, T., Johannsson, H., Kaess, M., Leonard, J. J., and
McDonald, J. (2013). Robust real-time visual odome-
try for dense rgb-d mapping. In Robotics and Automa-
tion (ICRA), 2013 IEEE International Conference on,
pages 5724–5731. IEEE.
Whelan, T., Kaess, M., Fallon, M., Johannsson, H.,
Leonard, J., and McDonald, J. (2012). Kintinuous:
Spatially extended kinectfusion.
Wu, F.-C., Ma, W.-C., Liang, R.-H., Chen, B.-Y., and Ouhy-
oung, M. (2006). Domain connected graph: the skele-
ton of a closed 3d shape for animation. The Visual
Computer, 22(2):117–135.
Zeng, M., Zhao, F., Zheng, J., and Liu, X. (2013). Octree-
based fusion for realtime 3d reconstruction. Graphical
Models, 75(3):126–136.
Zollh
¨
ofer, M., Nießner, M., Izadi, S., Rehmann, C., Zach,
C., Fisher, M., Wu, C., Fitzgibbon, A., Loop, C.,
Theobalt, C., et al. (2014). Real-time non-rigid recon-
struction using an rgb-d camera. ACM Transactions
on Graphics (TOG), 33(4):156.
