
Autonomous Vehicle Architecture Inspired by
the Neurocognition of Human Driving
Mauro Da Lio
1
, Alice Plebe
2
, Daniele Bortoluzzi
1
, Gastone Pietro Rosati Papini
1
and Riccardo Don
`
a
1
1
Department of Industrial Engineering, University of Trento, Trento, Italy
2
Department of Information Engineering and Computer Science, University of Trento, Trento, Italy
Keywords:
Automated Driving, Cognitive Systems.
Abstract:
The realization of Autonomous vehicles is recognized as a relevant objective for the modern society and con-
stitutes a challenge which in the last decade is concentrating a growing interest, involving both manufacturers
and research institutes. The standard approach to the realization of automated driving agents is based on a
well-known paradigm, consisting of the sense-think-act scheme. Even though this implements an understan-
dable and agreeable logic, a driving agent based on such an approach needs to be tested and qualified at a level
of reliability which requires a huge experimental campaign. In this position paper the scope of the problem
of automated driving is widened into the cognitive sciences, where the inspiration is taken to reformulate the
underlying paradigm of the automated agent architecture. In the framework of the EU Horizon 2020 Dre-
ams4Cars Research and Innovation Action project the challenge is to design and train an automated driving
agent which mimics the known human cognitive architecture and as such is able to learn from significant
situations encountered (either simulated or experienced), rather than simply applying a set of fixed rules.
1 INTRODUCTION
The recent years witnessed an exponential increase in
the number of industrial –and research– initiatives ai-
med at the implementation of automated driving. Ho-
wever, after the initial enthusiasms, one challenge in
particular is emerging: how to prove that the enginee-
red vehicles are safer than humans. One recent study
(Kalra and Paddock, 2016) demonstrates that exten-
sive road testing would require driving for billions
of miles –which is not realistic– to provide statisti-
cally significant proofs that the software is safer than
humans. By comparison, companies testing Autono-
mous Driving (AD) vehicles and reporting to the Ca-
lifornia State have accrued less than 0.5 million miles
between 9/2014 and 11/2015 (Dixit et al., 2016). The
problem stems from the fact that humans –contrary to
superficial perception– are very reliable at driving: in
the US there are about 33,000 fatalities and 2.3 mil-
lion injuries per year. As large as these figures may
look like, when divided by the total traveled miles (3
trillions) they correspond to very low rates of 1.09 fa-
talities and 77 injuries per 100,000,000 miles.
This position paper proposes a paradigm shift for
the architecture of the driving agents. Today, the soft-
ware for AD follows the sense-think-act paradigm,
which means that the perception system produces a
symbolic representation of the environment and that
there is software determining the agent behavior ba-
sed on this representation (a.k.a. Cartesian rationa-
lism). This approach almost necessarily means that
the software must be entirely developed and tested by
human designers. Simulations may be used to reduce
the amount of testing but the tested scenarios, again,
have to be known. For the sense-think-act architec-
ture, the goal of designing and testing a system ca-
pable of error-free behaviors for billions of miles is
definitely a challenge.
Overall, designing a system capable of correct be-
havior for billions of miles means designing a system
capable of acting in autonomy, i.e., in situations that
might have not been expressly considered at the de-
sign stage. Humans have the ability to transfer kno-
wledge of the few generic situations that they faced
in a few tenths of training hours at driving schools to
deal with novel situations found in a lifetime of dri-
ving. Moreover they continuously learn: for example,
every critical situation (even only potential hazards)
is detected and imagery mechanisms to study that si-
tuations at both dreaming and wake states exist, that
allow humans to learn new behavioral strategies for
situations that they have only imagined. That is why
Da Lio, M., Plebe, A., Bortoluzzi, D., Rosati Papini, G. and Donà, R.
Autonomous Vehicle Architecture Inspired by the Neurocognition of Human Driving.
DOI: 10.5220/0006785605070513
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 507-513
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
507

young licensees have far more risk than senior drivers.
Human accidents are largely due to distractions,
tiredness, risk taking or driving under the effects of
alcohol or drugs, aspects that will not affect artificial
systems. Hence we want to take inspirations from the
mechanisms underlying human autonomy and pro-
pose an artificial cognitive architecture capable of si-
milar autonomy, and capable of increasing its abilities
like senior drivers. For this, we analyze in the rest of
the paper the human sensorimotor system and show
how it might be taken as a model for the architecture
of driving agents.
This paper is one output of the EU Horizon
2020 ”Dreams4Cars” Research and Innovation action
(www.dreams4cars.eu).
2 THE NEUROCOGNITIVE
UNDERPINNING OF DRIVING
The ability to drive is one the many highly specialized
human sensorimotor behaviors. In addition to the uni-
versal ability to walk, run, and jump, specializations
that share with driving complex motor coordination
include playing piano, skying, playing tennis, and the
like (Wolpert et al., 2011). The history of robotics
has proved how difficult it is to implement perception-
action systems that lead to performances similar to
human ones, even for the basic walking abilities. Au-
tomated driving may appear easier, since car motion is
more prone to direct computer control than, for exam-
ple, robots with human-like gait. However, we deem
that the sophisticated control system that the human
brain develops, when learning to drive by comman-
ding the ordinary car interfaces, steering wheel and
pedals, may reveal precious insights on how to imple-
ment a robust automatic driving system.
The task to drive is solved by the human brain with
the same kind of strategy that we adopt for every sort
of motor planning that requires continuous and com-
plex perceptual feedback. For sure, how this general
strategy works is far from being fully understood, and
there are several competing theories, lacking a unani-
mous consensus. Nevertheless, a huge body of rese-
arch in neuroscience and cognitive neuroscience has
been produced in the past decades, that allows us to
grasp some general cues useful for designing artificial
car control systems.
2.1 Simulation and Emulation
Primarily, we consider approaches that belong to the
simulative theories, in the account reviewed in (Hes-
slow, 2012). In cognition, the idea of simulation has
been traditionally related with the hypothesis that our
social cognition is based on “simulating” internally
what is going on in the mind of others, adopting a
sort of psychological theory of how (ours and other’s)
minds work (Gallagher, 2007). The simulation the-
ory supported by Hesslow points to a different di-
rection, he argues that thinking in general is explica-
ted by simulating perceptions and actions involved in
the thought, without the need of actually executing the
actions, or perceiving online what is imagined. This
is also the course of action our project intends to take
forward (Da Lio et al., 2017). In the view of Hesslow,
simulation is a general principle of cognition, expli-
cated in at least three different components: actions,
perception, and anticipation.
One of the earlier proposals in this direction is the
theory of neural emulators (Grush, 2004), that bridges
a close link between the engineering domain of con-
trol theory and signal processing to neural represen-
tations. According to the emulation theory, the brain
is able to constructs neural models of the body and
of the environment, in addition to simply engaging
with them. During overt sensorimotor engagement,
these models are driven by efference copies in paral-
lel with the body and the environment, so to generate
expectations of the sensory feedback. Later on, these
models can also be run offline, in order to predict out-
comes of different actions, and evaluate and develop
motor plans. In terms of control theory, Grush’s emu-
lators are essentially forward models, and so will be
called in the rest of the paper. Grush further argued
that forward models can be realized by Kalman filters,
pointing to models that seem to support his hypothesis
(Wolpert and Kawato, 1998), and neuroscientific evi-
dences for forward models in the cerebellum (Wolpert
et al., 1998; Jeannerod and Frak, 1999). We will not
use the Kalman filter hypothesis here, while we em-
brace the characterization of the cerebellum as site of
forward models predicting the sensory effects of mo-
vements.
2.2 Imagery and Dreaming
A second tradition of research that converges into
Hesslow’s simulation account is perceptual imagery,
especially of visual modality. Mental imagery is the
phenomenon where a representation of the type crea-
ted during the initial phases of perception is present,
but the stimulus is not actually being perceived; such
representations preserve the perceptible properties of
the stimulus (Moulton and Kosslyn, 2009). Mental
imagery has connections with the phenomenon of dre-
aming, and it has been argued (Thill and Svensson,
2011) that the function itself of dreaming, in infants
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
508

through to early childhood, is to trigger and exercise
the capacity of simulating.
What is the mechanism that allows primary sen-
sorial areas to be activated both by online sti-
muli or by perceptual imagery remains to be unvei-
led. A prominent proposal is formulated in term
of convergence-divergence zones (CDZs) (Meyer and
Damasio, 2009). CDZs receive convergent projecti-
ons from the early sensorimotor sites and send back
divergent projections to the same sites. This arrange-
ment has the first purpose to record the combinatorial
organization of the knowledge fragments coded in the
early cortices, together with the coding of how those
fragments must be combined to represent an object
comprehensively. CDZ records are built through ex-
perience, by interacting with objects. The CDZ fra-
mework can explain perceptual imagery, as it propo-
ses that similar neural networks are activated when
objects or events are processed in perceptual terms
and when they are recalled from memory. This pro-
ject will experiment with implementations loosely in-
spired by CDZs.
2.3 Main Neural Components of
Simulation
The simulation theory as spelled out by Hesslow co-
vers many aspects of human cognition, but does not
address how the simulation framework might be ac-
tually realized in the brain. This crucial aspect is,
instead, central in the investigations done by Cisek
(Cisek, 2007; Cisek and Kalaska, 2010). In his ge-
neral framework, simulation is one component of
the mechanisms by which the brain selects actions
and specifies the parameters or metrics of those acti-
ons. Cisek’s theory is named affordance competition
hypothesis, in which “affordance” is the term origi-
nally used by Gibson (Gibson, 1979) to refer to the
action possibilities of the environment that are availa-
ble to an animal. For example, for most human-beings
a chair “affords” sitting, a glass “affords” grasping;
and we might say that for a driver a lane “affords”
either lane change or lane following and a yield line
“affords” either stopping or crossing. In Cisek, “af-
fordances” are the internal representations of the po-
tential actions which are in constant competition for
deciding the next behavior. In this project, the term
affordances will be used in exactly the same sense.
The first neural component of the affordance com-
petition hypothesis, in the context of visually guided
actions, is the occipito-parietal dorsal stream. In the
traditional division of the visual processing path into
the dorsal stream and the occipito-temporal ventral
stream the former builds a representation of where
things are and the latter of what things are (Unger-
leider and Mishkin, 1982). A more recent account
of the dorsal stream proposes that its role is to medi-
ate various visually guided actions by several substre-
ams. For example, the lateralintraparietal (LIP) area
specify potential saccade targets; the medial intrapa-
rietal (MIP) area specify possible directions for arm
reaching.
The next fundamental component is made up by
the basal ganglia in connection with the dorsolateral
prefrontal cortex (DLPFC), and performs action se-
lection. Since action selection is a fundamental pro-
blem faced by even the most primitive of vertebra-
tes, it is consistent with the involvement of an ancient
structure conserved throughout evolution, like basal
ganglia. DLPFC appears to play the role of collecting
“votes” for categorically selecting one action over ot-
hers. There is a wide literature on the detailed me-
chanisms by which basal ganglia and prefrontal cor-
tex interact in taking decisions (Redgrave et al., 1999;
Doya, 1999; Bogacz and Gurney, 2007; Lewis et al.,
2011).
The last fundamental component is the cerebel-
lum, where an internal predictive feedback is gene-
rated, once the final selected action is released. As
mentioned above, the cerebellum was also taken into
account by Grush for its theory of emulators.
3 AGENT SENSORIMOTOR
ARCHITECTURE
The overall architecture of the agent to be develo-
ped in this project is broadly derived from the neu-
ral components and brain strategies that allow humans
to drive, and were described in the previous sections.
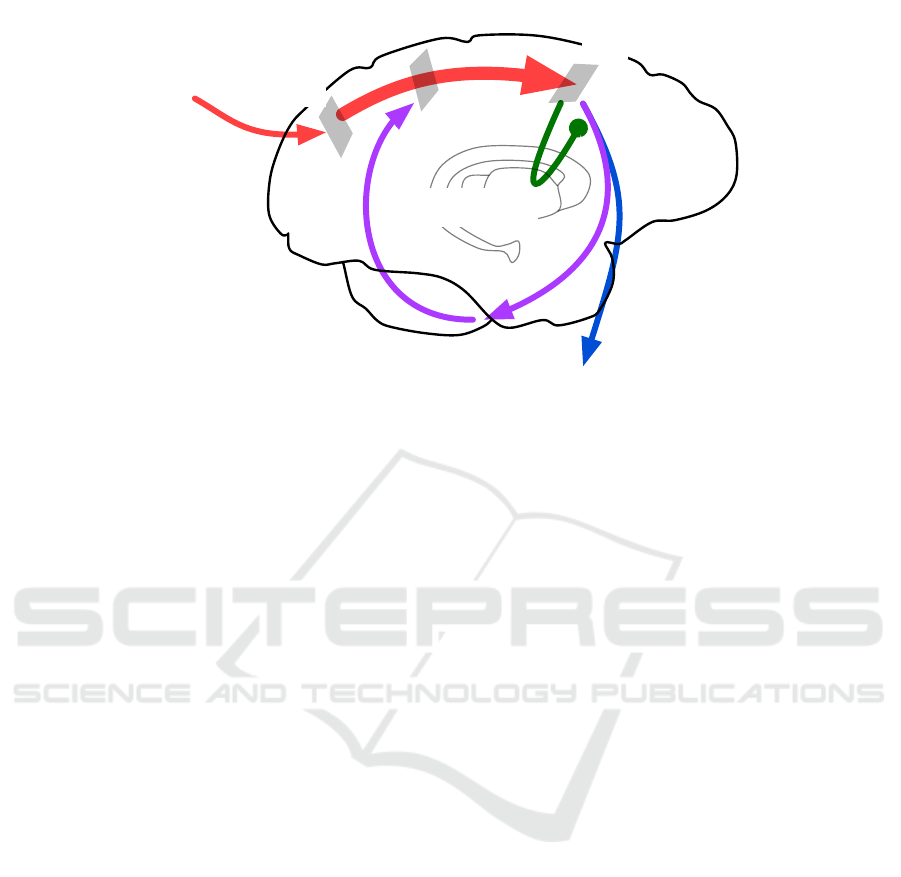
For this reason, the main scheme of the agent, shown
in Fig. 1, is overlaid on a sketched brain, and is an
adaptation to the task of driving by an artificial agent
of the action-selection scheme in (Cisek and Kalaska,
2010, Fig.1 p.278).
In the remaining of this section the three main pro-
cessing pathways shown Fig. 1 will be described.
3.1 Inverse Model
The pathway depicted in red in Fig. 1 performs essen-
tially the transformation of an inverse model, taking
as input sensory data and producing outputs in the for-
mat of motor controls. This is the role played by the
visual dorsal stream in the account of Cisek, and we
adopt his terminology by calling affordances the final
outputs of this processing pathway, (c) in the figure.
Autonomous Vehicle Architecture Inspired by the Neurocognition of Human Driving
509
Automotive
sensors
Motor Output
Cerebellum
(dorsal stream)
Action Selection
(basal ganglia)
motor
cortex
sensory
cortex
a
b
c
Figure 1: Main scheme of the agent architecture, the main pathways are depicted in red (dorsal stream), green (action se-
lection) and violet (forward model); (a), (b), and (c) are progressive stages of representations in a scale from sensorial to
affordances.
The format in (a) is basically in the topographic re-
presentation of the perceptual space, fusing informa-
tion from sensors like camera and LIDAR. The format
in (b) will be in a topology more oriented toward the
egocentric control requirements. This topology will
be in two dimensions, since the control space for dri-
ving can be reduced to the instantaneous lateral and
longitudinal controls. The format in (c) is still in a
two dimensional topology, but in terms of discrete af-
fordances, such as “lane change”, “car follow”, and
similar. As visible in Fig. 1, the architecture is arran-
ged to receive also input from intelligent sensors that
can provide data at higher levels of format, in (b) and
even in (c).
This pathway, much like the biological dorsal
stream, is in fact a collection of several specialized
substreams, at least the following can be identified:
• road geometry;
• obstacles;
• traffic lights or other traffic directives.
There is a difference in kind among the outputs of
those substreams: road geometry provides the active
regions in the space of longitudinal and lateral con-
trols, while obstacles and traffic lights compute inhi-
bited regions.
At the core of the transformations from (a) to (c)
there will be a deep neural network model, loosely
inspired by CDZs (Meyer and Damasio, 2009) des-
cribed in §2.2. The deep neural network will encode
the high dimensional sensorial input data into layers
with gradually reduced dimensions, up to a final low
dimensional feature space, reminding the convergent
process in Meyer & Damasio’s CDZs. This small fea-
ture space, in turn, becomes the input of a similar neu-
ral network acting as decoding, in which the dimensi-
ons of the layers are gradually increasing, paralleling
the divergence in CDZs. Note that, when the desired
output of the decoding network is the reconstruction
of the original input, the combination is an autoenco-
der, Hinton’s idea that gave birth to deep learning it-
self, before being called “deep learning” (Hinton and
Salakhutdinov, 2006; Hinton et al., 2006). Autoenco-
der has then become one of the most effective way of
generating new data with deep learning (Dosovitskiy
et al., 2017). In our case there will be both a decoding
network reconstructing perceptual data, which plays
the role of imagery, and a different network which de-
codes in the format of motor controls.
3.2 Action Selection
This component corresponds roughly to the proces-
ses performed in the brain by basal ganglia, typically
in coordination with DLPFC, as described in §2.3. It
has the function of deciding the agent’s behavior, and
can accept high-level biases, such as automation level
or driving style. Its implementation will be based on
the multihypothesis sequential probability ratio test,
an asymptotically optimal statistical test for decision
making that has been shown to be a possible computa-
tional abstraction of the decision function performed
by the cortex and basal ganglia.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
510

3.3 Forward Model
This last component performs a role that is suppo-
sed to take place in the cerebellum, as discussed in
§2.3: forward model. The input of this component is
made up of efferent copies of motor commands, and
the output is in term of intermediate perceptual data
of the scene, as realized if the motor commands have
been issued. This way, it would be possible to detect
salient, and potentially dangerous situations, without
having actually experience those situations in reality.
4 SYSTEM ARCHITECTURE
The system here proposed implements three different
environments: the “wake” state, the “dream” state and
quality assurance. Fig 2 shows an outline of this ar-
chitecture.
4.1 The Wake State
This state corresponds with real driving, during
which the agent records situations that are conside-
red worthy to be re-enacted in the dream state. Those
salient situations are determined according to several
criteria. The most relevant events occur when there is
a discrepancy between the predictions of the internal
model and what actually happens in the real world.
These situations can point out some imperfections in
the prediction/planning model, or are the indication of
the occurrence of a novel condition the agent has no
knowledge about. Other relevant criteria that are ta-
ken into account are space-time separation with other
vehicles, jerkiness of control, compliance with traffic
rules, and also traffic and energy efficiency.
In order to be able to re-run experienced situati-
ons, the agent notes any event considered worthy of
further analysis. The agent logs both the low-level
sensory and control signals, and the high-level sig-
nals represented by the internal states of the agent’s
architecture. In such way, it is possible to record the
“intentions” of the agent (or the estimated intentions
of the human driver) at all levels of the sensorimotor
system. Hence, the agent is able to run simulations of
alternative lower-level strategies while preserving the
higher-level intentions.
4.2 The Dream State
During this state, the agent can explore a simula-
ted world to learning new behaviors, by testing dif-
ferent situations. The state is implemented in the
open-source open-source virtual reality driving simu-
lation environment OpenDS (www.opends.eu), based
primarily on multibody systems (MBS) technology
(Blundell and Harty, 2004), with some machine lear-
ning sub-model extensions. MBS is a general way for
engineers to simulate large-scale physical system dy-
namics, including complex systems of bodies under
the action of external forces, control loops, and other
conditions. One significant advantage of MBS, com-
pared to e.g., cerebellar forward models, is longer-
term accuracy deriving from the universal physical
principles substrate.
MBS can be instantiated with a very large number
of parameters representing physical quantities. Se-
lecting the model parameters from a distribution can
be a method for generating imaginary conditions. Ne-
vertheless, the distribution values must be plausible (it
does not make sense to simulate a road with a friction
coefficient equal to 10 since this never happens in re-
ality). Thus, the distributions can either derive from
the agent’s observations whilst in the “wake” state or
from a-priori knowledge, when it is is possible wit-
hout loss of generality.
A radical different approach for generating imagi-
nary situations is to use the same deep neural network
model at the core of the inverse model of the agent,
described in §3.1. This model has one principal de-
coding part that generates detailed motor commands
from features at low dimensions, but also a secon-
dary decoding part which works exactly as an autoen-
coder. It is therefore possible to generate a number
of imaginary situations by randomly exploring this
small feature space, with the caution of constraining
these random combinations towards those situations
that are more likely to be useful.
Another possible method is via generalized, top-
down “motor babbling”, a well established notion in
the framework of perception-action machine learning
(Shevchenko et al., 2009; Windridge et al., 2012;
Windridge, 2017) and applied in cognitive robotics
(Dearden and Demiris, 2005). It is akin to the pro-
cess of language learning in infant humans: starting
from minimal bootstrap sets of percepts and actions,
the entire action space is randomly sampled. For each
new motor action that produces a discernible percep-
tual output in the current perceptual set, the produced
percept is allocated. This process can be carried out
at various levels in the perception-action hierarchy.
4.2.1 Optimization
The final purpose of the simulation environment is
the development of optimized behaviors (at all le-
vels). One of the possible strategy is optimal control
(OC), a methodology for producing optimal solutions
Autonomous Vehicle Architecture Inspired by the Neurocognition of Human Driving
511
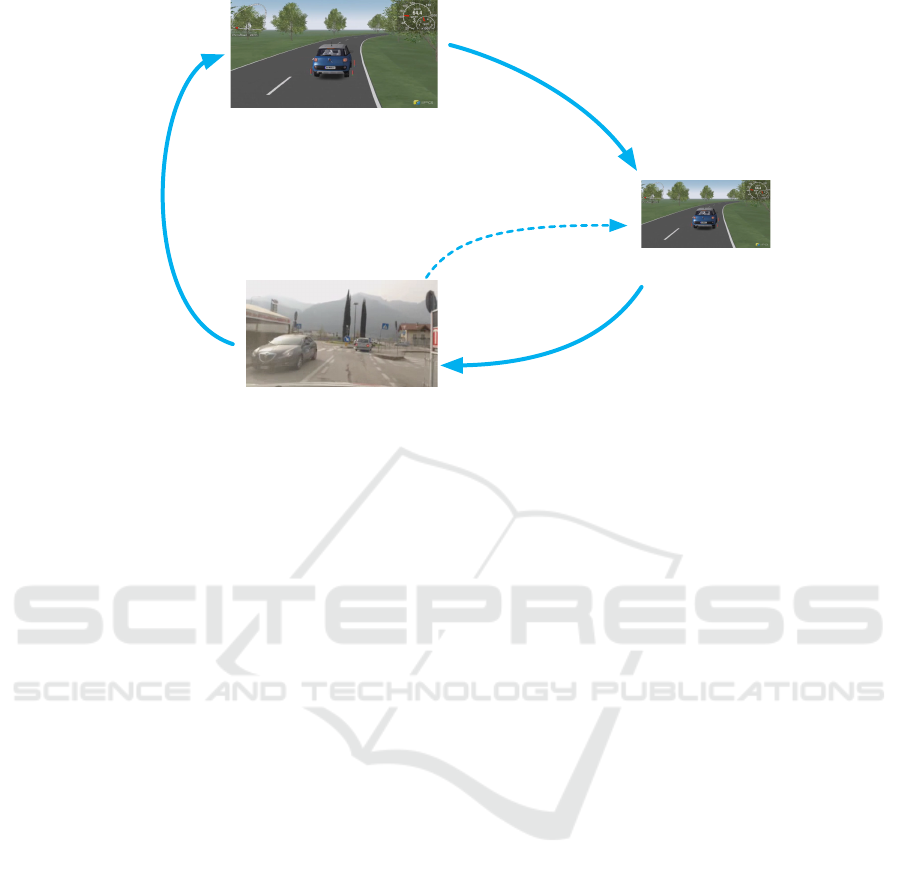
Real Driving Quality Assurance
Simulation
(efficient exploration, action discovery, optimisation)
Agent copy
Transfer salient
situations
Updated Agent
Certified Agent
(current)
Figure 2: The system architecture, consisting of three components: real driving, simulation/optimization and quality assu-
rance.
for goal-directed problems (Bertolazzi et al., 2005).
Despite being OC a methodological framework based
on differential algebraic equations and other mathe-
matical structures, there are empirical evidences that
the planning of hand movement to reach a target, as
performed by the brain, corresponds to the minimiza-
tion of the integral of the squared jerk, as in OC (Liu
and Todorov, 2007). Therefore, OC too is in line with
the brain-inspired design principle of this project.
Another possible approach is motivated learning,
inspired by the learning mechanisms in animals, and
thus better suited for higher-level strategies. In this
case, the agent takes advantage of opportunistic inte-
ractions with the environment to develop a knowledge
of what actions cause predictable effects in the envi-
ronment. In this way, the agent is able to build internal
models of action-outcome pairings in the brain.
4.3 Quality Assurance
Lastly, the third environment shown in Fig. 2 has
the purpose of quality assurance. As the previous
“dream” state, this environment is based on a multi-
body simulation system too, this one called CarMaker
by IPG Automotive (ipg-automotive.com).
By testing against several test cases, the system
certifies new versions of the agent, ensuring that any
updated agent works no worse than the previously op-
timal one. It also helps to identify over-fitting, such
as when the agent learns to better cope with the most
recently-dreamed situation at the expenses of earlier
ones.
5 CONCLUSION
This position paper has introduced a biologically
inspired layered control architecture for intelligent
vehicles, which relies on the recent developments in
cognitive systems. We believe that the adoption of
hierarchical perception-action learning via a dream si-
mulation mechanism can considerably extend the uti-
lity of training data during learning. Moreover, this
approach seems to offer advantages in terms of re-
sources needed for development.
ACKNOWLEDGEMENTS
This work is supported by the European Commission
under Grant 731593 (Dreams4Cars).
REFERENCES
Bertolazzi, E., Biral, F., and Da Lio, M. (2005). Symbolic-
numeric indirect method for solving optimal cont-
rol problems for large multibody systems: The time-
optimal racing vehicle example. Multibody System
Dynamics, 13(2):233–252.
Blundell, M. and Harty, D. (2004). The multibody systems
approach to vehicle dynamics. Elsevier, Amsterdam.
Bogacz, R. and Gurney, K. (2007). The basal ganglia and
cortex implement optimal decision making between
alternative actions. Neural computation, 19(2):442–
477.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
512

Cisek, P. (2007). Cortical mechanisms of action selection:
the affordance competition hypothesis. Philosophical
Transactions of the Royal Society B: Biological Scien-
ces, 362(1485):1585–1599.
Cisek, P. and Kalaska, J. (2010). Neural mechanisms for
interacting with a world full of action choices. Annual
review of neuroscience, 33:269–298.
Da Lio, M., Thill, S., Svensson, H., Gurney, K., Anderson,
S., Windridge, D., Yksel, M., Saroldi, A., Andreone,
L., and Heich, H.-J. (2017). Exploiting Dream-Like
Simulation Mechanisms to Develop Safer Agents for
Automated Driving. Yokohama, Japan.
Dearden, A. and Demiris, Y. (2005). Learning forward mo-
dels for robots. International Joint Conference on Ar-
tificial Intelligence, 19:2–7.
Dixit, V. V., Chand, S., and Nair, D. J. (2016). Autono-
mous Vehicles: Disengagements, Accidents and Re-
action Times. PLOS ONE, 11(12):e0168054.
Dosovitskiy, A., Springenberg, J. T., Tatarchenko, M., and
Brox, T. (2017). Learning to generate chairs, ta-
bles and cars with convolutional networks. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 39(4):692–705.
Doya, K. (1999). What are the computations of the cerebel-
lum, the basal ganglia and the cerebral cortex? Neural
Networks, 12(78):961–974.
Gallagher, S. (2007). Social cognition and social robots.
Pragmatics & Cognition, 15(3):435–453.
Gibson, J. J. (1979). The Ecological Approach to Percep-
tion. Houghton Miflin, Boston (MA).
Grush, R. (2004). The emulation theory of representation:
motor control, imagery, and perception. The Beha-
vioral and brain sciences, 27(3):377–96; discussion
396–442.
Hesslow, G. (2012). The current status of the simulation
theory of cognition. Brain research, 1428:71–9.
Hinton, G. E., Osindero, S., and Teh, Y.-W. (2006). A fast
learning algorithm for deep belief nets. Neural Com-
putation, 18:1527–1554.
Hinton, G. E. and Salakhutdinov, R. R. (2006). Redu-
cing the dimensionality of data with neural networks.
Science, 28:504–507.
Jeannerod, M. and Frak, V. (1999). Mental imaging of mo-
tor activity in humans. Current Opinion in Neurobio-
logy, 9(6):735–739.
Kalra, N. and Paddock, S. M. (2016). Driving to safety:
How many miles of driving would it take to demon-
strate autonomous vehicle reliability? Transportation
Research Part A: Policy and Practice, 94:182–193.
Lewis, J., Chambers, J. M., Redgrave, P., and Gurney,
K. N. (2011). A computational model of intercon-
nected basal ganglia-thalamocortical loops for goal di-
rected action sequences. In BMC Neuroscience, vo-
lume 12(Suppl 1), page 136, Stockholm.
Liu, D. and Todorov, E. (2007). Evidence for the flexible
sensorimotor strategies predicted by optimal feedback
control. The Journal of neuroscience : the official
journal of the Society for Neuroscience, 27(35):9354–
68.
Meyer, K. and Damasio, A. (2009). Convergence and di-
vergence in a neural architecture for recognition and
memory. Trends in Neurosciences, 32(7):376–382.
Moulton, S. T. and Kosslyn, S. M. (2009). Imagining pre-
dictions: mental imagery as mental emulation. Phi-
losophical Transactions of the Royal Society B: Bio-
logical Sciences, 364(1521):1273–1280.
Redgrave, P., Prescott, T., and Gurney, K. (1999). The ba-
sal ganglia: a vertebrate solution to the selection pro-
blem? Neuroscience, 89:1009–1023.
Shevchenko, M., Windridge, D., and Kittler, J. (2009). A
linear-complexity reparameterisation strategy for the
hierarchical bootstrapping of capabilities within per-
ceptionaction architectures. Image and Vision Com-
puting, 27(11):1702–1714.
Thill, S. and Svensson, H. (2011). The inception of simu-
lation: a hypothesis for the role of dreams in young
children. In Carlson, L., Hoelscher, C., and Shipley,
T. F., editors, Proceedings of the 33rd Annual Con-
ference of the Cognitive Science Society, pages 231–
236, Austin, TX. Cognitive Science Society.
Ungerleider, L. and Mishkin, M. (1982). Two cortical visual
systems. In Ingle, D. J., Goodale, M. A., and Mans-
field, R. J. W., editors, Analysis of visual behavior,
pages 549–586. MIT Press, Cambridge (MA).
Windridge, D. (2017). Emergent Intentionality in
Perception-Action Subsumption Hierarchies. Fron-
tiers in Robotics and AI, 4.
Windridge, D., Felsberg, M., and Shaukat, A. (2012). A
Framework for Hierarchical Perception-Action Lear-
ning Utilizing Fuzzy Reasoning. IEEE transactions
on systems man and cybernetics Part B Cybernetics a
publication of the IEEE Systems Man and Cybernetics
Society, 43(1):155–169.
Wolpert, D. M., Diedrichsen, J., and Flanagan, J. R. (2011).
Principles of sensorimotor learning. Nature reviews.
Neuroscience, 12(12):739–51.
Wolpert, D. M. and Kawato, M. (1998). Multiple paired
forward and inverse models for motor control. Neural
Networks, 11(7-8):1317–1329.
Wolpert, D. M., Miall, R. C., and Kawato, M. (1998). In-
ternal models in the cerebellum. Trends in cognitive
sciences, 2(9):338–47.
Autonomous Vehicle Architecture Inspired by the Neurocognition of Human Driving
513
