
Visualization of Abstract Algorithmic Ideas
Lud
ˇ
ek Ku
ˇ
cera
Faculty of Mathematics and Physics, Charles University, Prague, Czech Republic
Faculty of Information Technologies, Czech Technical University, Prague, Czech Republic
Keywords:
Visualization, Algorithm, Invariant, JavaScript, Voronoi Diagram, Fortune.
Abstract:
Algorithm visualization has been high topic in CS education for years, but it did not make its way to university
lecture halls as the main educational tool. The present paper identifies two key condition that an algorithm
visualization must satisfy to be successful: general availability of used software, and visualization of why an
algorithm solves the problem rather than what it is doing. One possible method of “why” algorithm visuali-
zation is using algorithm invariants rather than showing the data transformations only. Invariants are known
in Program Correctness Theory and Software Verification and many researchers believe that knowledge of
invariants is essentially equivalent to understanding the algorithm. Algorithm invariant visualizing leads to
codes that are computationally very demanding, and powerful software tools require downloading/installing
compilers and/or runtime machines, which limits the scope of users. One our important finding is that, due to
computing power of the recent hardware, even very complex visualization involving 3D animation (e.g., For-
tune’s algorithm, see Section 4) could be successfully implemented using interpreted graphic script languages
like JavaScript that are available to every web user without any downloading/installation.
1 INTRODUCTION
Algorithm visualization (often called algorithm ani-
mation) uses dynamic graphics to visualize computa-
tion of a given algorithm.
First attempts to animate algorithms date to mid
80’s (Brown, 1988; Brown and Sedgewick, 1985),
and the golden age of algorithm visualization was
around the year 2000, when excellent software tools
for a dynamic algorithm visualization (e.g., the lan-
guage Java and its graphic libraries) and sufficiently
powerful hardware were already available. It was
expected that algorithm visualization would dramati-
cally change the way algorithms are taught.
Many algorithm animations had appeared, mostly
for simple problems like basic tree data structures and
sorting. There were even attempts to automatize de-
velopment of animated algorithms and algorithm vi-
sualization. Another direction was to develop tools
that would allow students to prepare their own anima-
tions easily. Instead of giving particular references to
algorithm animation papers, the reader is directed to
a super-reference (Algoviz, ) that brings a list of more
than 700 authors, some of them even with 29 referen-
ces in algorithm animation and visualization. There
are also many web pages that offer algorithm anima-
tion systems, e.g., (Algoanim, ; Algomation, ; DD2, ;
AlgoLiang, ; VisuAlgo, ).
However, algorithm visualization and animation
has not fulfilled the hopes, and it is still not used too
much in CS courses. One can even find articles with
titles like ”We work so hard and they don’t use it”
(bassat Levy and Ben-Ari, 2007), complaining about
low acceptance of algorithm animation tools by tea-
chers. The number of articles, reports, and visualiza-
tion tools sensibly declined in the second decade of
the new millennium.
The present paper is an attempt to find why algo-
rithm animation and visualization is used much less
in instruction then we hoped 10 or 20 years ago.
We strongly believe that the reason is relative sim-
ple: An algorithm operates on some data (the input
data, working variables, and the output data). Usu-
ally, in any particular field of Computer Science, there
is a standard way of visualization of data - graphs and
trees are drawn as circles connected by line segments,
number sequences could be visualized as collections
of vertical bars, there are standard ways of drawing
matrices, vectors, real functions, etc. An algorithm
animation is usually implemented by running the al-
gorithm slowly or in steps, and simply modifying the
visual representation of the data in the screen.
A person who knows and understands the algo-
rithm in question can see how the algorithm progres-
ses, but a novice user just see visual objects moving
and changing their shapes and colors, but finding out
Ku
ˇ
cera, L.
Visualization of Abstract Algorithmic Ideas.
DOI: 10.5220/0006810104970504
In Proceedings of the 10th International Conference on Computer Supported Education (CSEDU 2018), pages 497-504
ISBN: 978-989-758-291-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
497

why the movie runs in that way is usually too difficult
for him or her.
The solution that we offer is to visualize (not as
much) what the algorithm is doing, but why it is wor-
king in the way it is working. In other words, our aim
is to visualize an abstract algorithmic idea that is be-
hind a particular computing method. We admit that
the statement is rather vague. Moreover, we are not
able to give any general methodology of visualizing
abstract algorithmic ideas (and we guess that no such
methodology exists). Nevertheless certain examples
are given in an attempt to illustrate the approach.
As we argue below, understanding an algorithm is
essentially equivalent to the knowledge of the invari-
ant used to prove its partial correctness and termina-
tion. Since the notion of an algorithm invariant is less
abstract and vague than the term “algorithmic idea”,
we believe that “animation of algorithm invariants” is
a better description of our work.
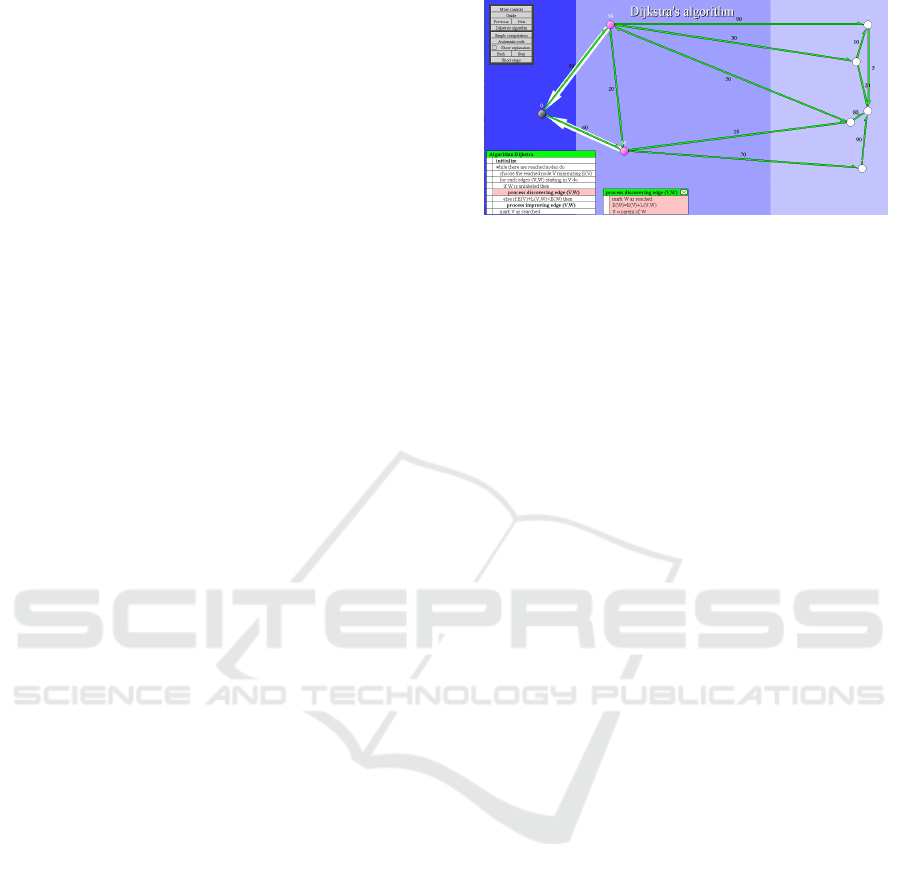
Let us note that typically a visual representation
of an invariant is not a particular visual object, but
certain organization or arrangement of the visual data.
If, e.g., each vertex v of a graph subjected to Dijk-
stra’s algorithm is labeled by a value E(v), if vertices
are classified as “processed” and “unprocessed”, and
if processed vertices are black and the unprocessed
ones are red, then the invariant
• if u is processed, and w is unprocessed, then
E(u) ≤ E(w)
can easily be visualized by moving each vertex v ho-
rizontally (i.e., keeping its y-coordinate unchanged)
to a location in which its x-coordinate is proportional
to E(v). Let us note that this also means that verti-
ces move during the computation, as their E-values
change.
In such a case there is a clearly imaginable verti-
cal line, dividing the screen to a left part containing
processed vertices, and the right one populated by un-
processed vertices. The dividing vertical line can be
explicitly drawn to make representation of the invari-
ant more explicit. Alternatively, the background color
could be different in the respective parts of the screen.
See Fig. 1 (that shows slightly more complex situa-
tion).
2 WHY VISUALIZATION USING
INVARIANTS
2.1 Algorithm Invariants
The notion of an algorithm invariant is used when pro-
ving program termination and correctness:
• Termination: Given a program P, and a statement
φ, prove that if P gets input data verifying the sta-
tement φ, the computation halts after finite num-
ber of steps.
• Partial Correctness: Given a program P, and two
statements φ and ψ, prove that if P gets input data
verifying the statement φ, and if the computation
halts after finite number of steps, the output data
verify the statement ψ.
To prove termination, it is sufficient to have a
function τ and a constant c such that, given input data
verifying φ, the function τ is always non-negative and
after any c consecutive steps of the algorithm it decre-
ases by at least 1.
The standard method of solving the partial cor-
rectness problem is to find a statement Φ such that
it implies φ at the beginning of the computation, Φ
together with the halting condition of the program P
imply ψ, and Φ remains valid throughout the whole
computation. This is why Φ is usually called an inva-
riant of the algorithm P.
Given an invariant Φ for the partial correctness
proof, proving the initial and the final condition is
usually simple. Proving that Φ is an invariant is a
more complicated, but rather straightforward task: the
code P is split to atomic loop-less segments, and for
each segment one proves that if Φ is satisfied on the
entry of the segment, then it remains valid when the
segment is executed.
The main and principal problem of Program Cor-
rectness proving is to find an invariant. The halting
problem implies that in certain cases such an invari-
ant does not exist and its existence is algorithmically
undecidable. Even if an invariant exists, it is not al-
ways clear how to find it.
The Program Correctness theory can be used as a
theoretical background in Software Verification, but
at least as important is a meta-theory over the Pro-
gram Correctness. It is widely accepted by many re-
searchers and teachers in Algorithm Design and Ana-
lysis that knowing an invariant of an algorithm is clo-
sely related (and some say equivalent) to understan-
ding the algorithm:
If one knows why a given algorithm always halts,
he or she usually knows some measure of “unexplored
or unprocessed data”, and such a measure can be used
as a termination counter.
Similarly, if one really understands why an al-
gorithm works correctly, he or she also knows or is
able to imagine the logical connections and relations
among the data that are processed by the algorithm.
In such a case, it is sufficient to write down a descrip-
tion of all such relations in a form of a (usually rather
complex) statement Φ to get an invariant.
CSEDU 2018 - 10th International Conference on Computer Supported Education
498
On the other hand, knowledge of a termination
counter tells us (usually in a very straightforward
way) how the algorithm moves toward the end of the
computation. In some cases the function is fairy sim-
ple (e.g., the number of nodes processed by Dijkstra’s
shortest path algorithm), sometimes we have to con-
struct rather complicated “potential functions” that
measure progress of the computation, but in all cases
the way how the termination counter is constructed
gives us clear understanding why the algorithm even-
tually halts.
Similarly, an invariant is usually a generalization
of the output data condition that shows how the solu-
tion is gradually constructed.
2.2 Simple Invariant Example
A very straightforward and simple example of a ter-
mination function and an invariant can be given in the
case of Dijkstra’s shortest path algorithm. There are
many visualizations of Dijkstra’s algorithm available
in the web, e.g. (Makohon et al., 2016; DD1, ; DD2,
; DD3, ; DD4, ; DD5, ; DD6, ; DD11, ; DY1, ; DY2,
; DY3, ; DY4, ; DY5, ; DY6, ; DY7, ; DY8, ; DY9,
; DY10, ; DY11, ; DY12, ; DY13, ; DY14, ; DY15,
; DY16, ; DY17, ; DY18, ; DY19, ; DY20, ), but no
one of them tries to visualize the invariants of the al-
gorithm.
Dijkstra’s algorithm finds a shortest path from a
given vertex v
0
of a non-negatively edge labeled uno-
riented graph to all remaining vertices.
R ← {v
0
}; U ← all remaining vertices; P ←
/
0;
E(v
0
) ← 0; E(v) ← ∞ for remaining vertices;
while R 6=
/
0 do
u ← the element of R minimizing E(u);
relax all edges starting in u;
move u from R to P;
end while;
Vertices of the sets U, R, P are called unreached, rea-
ched (but not yet fully processed), and processed. Re-
laxing an edge (u, v) means to perform the following
operation:
if E(v) = ∞ then move v from U to R;
E(v) = min(E(v), E(u) + L(u, v));
where L(u, v) is the length (label) of the edge (u, v).
The algorithm contains just one while loop, and
the termination is given by the following statement:
during each iteration of the loop, the (non-negative)
size of R ∪U decreases by one.
A path v
0
,v
1
,... , v
k
is called definitive, if
v
0
,v
1
,... , v
k−1
∈ P (v
k
∈ P is not required).
Figure 1: Dijkstra’s shortest path algorithm visualization.
The partial correctness is proved using the follo-
wing invariant (for details, see, e.g., (Cormen et al.,
2001)):
• for any vertex v and in any moment of computa-
tion, E(v) is the length of the shortest definitive
path from v
0
to v.
The correctness proof of Dijkstra’s algorithm also
uses the following auxiliary invariant:
• E(v) = ∞ if and only if v is unreached, and if v is
reached and w is processed, then E(v) ≥ E(w).
The main invariant implies immediately correct-
ness of the algorithm: at the end, all nodes accessible
from v
0
are processed, and hence all paths are defini-
tive, and therefore E(v) is the length of the shortest
path to v.
As already mentioned above, the auxiliary invari-
ant can easily be visualized if any vertex v moves hori-
zontally during the animation so that the x-coordinate
of its location is always proportional to E(v). Such a
visualization also makes it very easy to show the va-
lidity of the main invariant, because it makes it easy
to see whether a given path is definitive. See Fig. 1,
where the domains of vertex sets P, R, U are dark,
less dark, and light, resp.
2.3 Invariant Visualization
If we accept the postulate that the algorithm under-
standing is equivalent to the knowledge of the algo-
rithm invariant, we view educational algorithm visu-
alization in a different light. The goal is not only to
visualize the data and show them changing, but we
have to arrange the data and possibly add some other
visual objects to visualize the invariant(s). Since it
often happens that relatively similar algorithms have
quite different invariants (e.g., the shortest path al-
gorithms of Dijkstra and Bellman-Ford, see the next
section), there is no general method of visualizing al-
gorithm invariants, and any such animation is unique
and incomparable with the others.
Visualization of Abstract Algorithmic Ideas
499
3 FURTHER INVARIANT
VISUALIZATION EXAMPLES
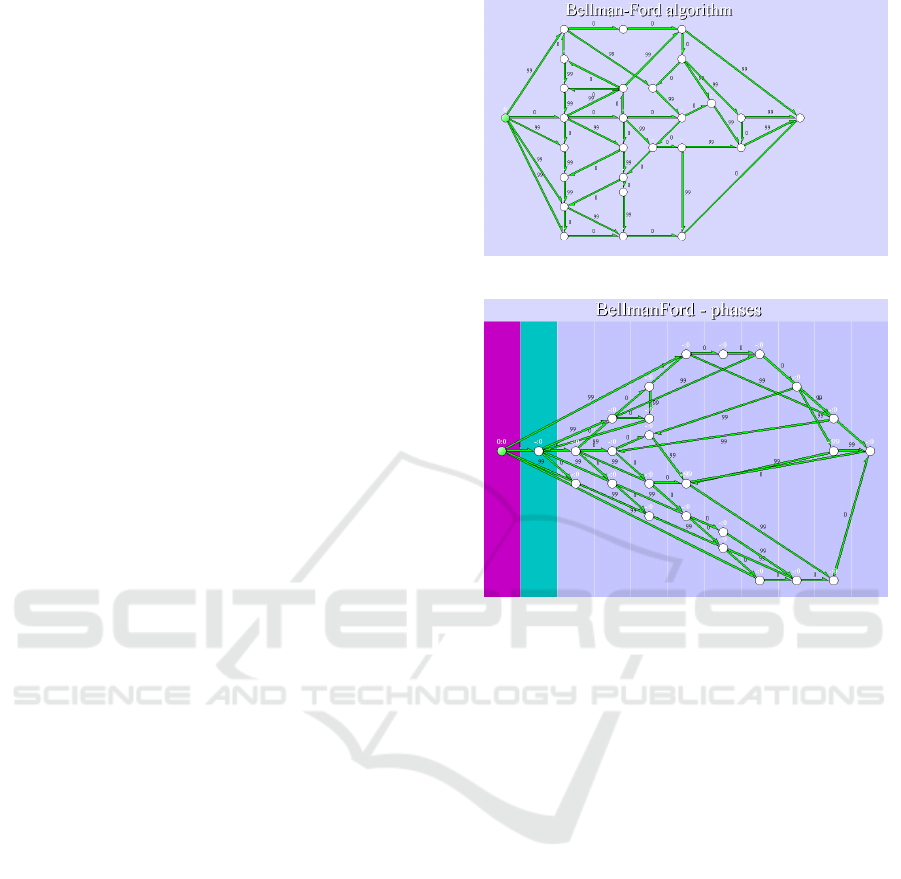
3.1 Bellman-Ford Algorithm
Bellman-Ford (BF) shortest path algorithm is very si-
milar to the method of Dijkstra mentioned in the pre-
vious subsection. It also searches for the shortest path
from a given vertex v
0
to all other vertices. However,
the termination proof of BF is much more difficult and
completely different.
We say that a vertex v of the graph belongs to a
layer k, if k is the number of edges of the shortest
path from v
0
to v. (It there are more shortest paths to
v, take the minimum of such k over all shortest paths.)
Similarly as Dijkstra’s method, Bellman-Ford al-
gorithm also computes an estimation E(v) of the
length of the optimal path to v. One who knows the
BF algorithm understands that if v belongs to the layer
k, E(v) is equal to the length of the shortest path to
v for the first time after k edge relaxations along the
path. Therefore the computation can be divided into
phases in such a way that during the k-th phase E(v)
receives the final value exactly for vertices that belong
to the layer k.
Note that during the k-th phase, E(v) can also
change for vertices belonging to layers ` > k, but the
changed value will be changed again in later phases.
All this can easily be seen, if the way the graph
is drawn in the screen is changed as follows: starting
from the original locations of vertices, each vertex v
moves horizontally so that its x-coordinate becomes
equal to αk + β, where α and β are two positive con-
stants, and k is the index of the layer to which v be-
longs. In other ways, all vertices of the same layer
finish to belong to one vertical line, and layer indices
increase left-to-right. It is advantageous to visualize
layers better by embedding them into vertical stripe
partition of the plane, see Fig. 3.
Note also that the partition of vertices to layers is
known only after the computation is finished. There-
fore the advantageous way of visualization of the BF
computation is to run the algorithm first in the stan-
dard way, using the initial vertex locations. Not too
much understanding is generated by the run. Then,
using the tree of the shortest paths, vertices are arran-
ged to vertical layers, and algorithm is restarted. Now,
in 20/20 hindsight, students can clearly see what has
really happened during the first run and why it has
finished in the determined time.
Figure 2: Bellman-Ford algorithm standard visualization.
Figure 3: Bellman-Ford algorithm visualization with pha-
ses.
3.2 Binary Trees
Perhaps every one who is active in the field of algo-
rithm animation has his or her own animation of Bi-
nary Search Tree (BST). The invariant of BST is very
easy: when vertices of the tree are scanned left-to-
right (i.e., searched in an in-order way), their labels
form a non-decreasing sequence, see Fig. 4. Howe-
ver, only few existing visualizations of BST show this
invariant. It might be argued that the BST operations
are so easy that this is not necessary (but is it neces-
sary to visualize such easy operations at all?)
It is more important to visualize advanced balan-
ced trees, like AVL-trees and red-black trees. Most
of such constructions are based on the rotation ope-
ration, see, e.g., (Cormen et al., 2001). It is very im-
portant to show that a rotation does not violate the
invariant. This can advantageously be done by ani-
mating rotation in such a way that vertices move just
vertically during rotation (see red arrows in Fig. 4),
which means that the sequence of bars representing
vertex labels does not change at all during a rotation -
a rotation preserves the invariant.
Up to our best knowledge, this simple visual trick
that clearly illustrates the principal idea of tree ba-
CSEDU 2018 - 10th International Conference on Computer Supported Education
500
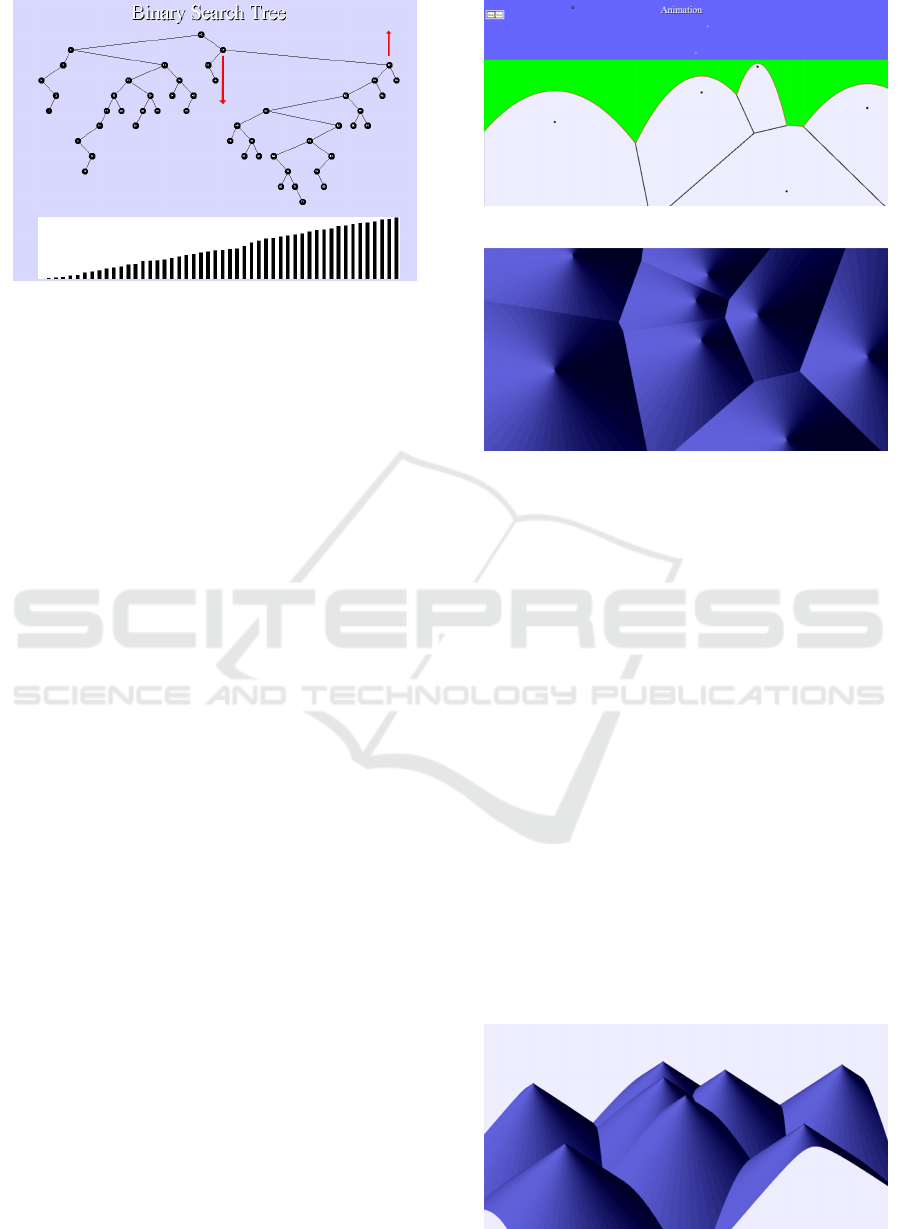
Figure 4: Binary search tree with vertex label bars.
lancing, which is the basis for all advanced tree data
structures, has never been used in connection with
tree data structure visualization.
4 ALGORITHMIC IDEA
VISUALIZATION
Even though the example given in this section can
also be understood as an algorithm invariant visua-
lization, it is perhaps more appropriate to speak about
algorithmic idea visualization (AIV). Once more,
there is no general method of AIV, because the under-
lying ideas of different algorithms in different fields
have nothing in common, and each idea is unique and
requires unique method of representation by dynamic
graphic means.
Well, in fact, there is one general method of AIV.
Even though very little is known about creative men-
tal process that leads to discovery of new algorithms,
we believe (based on our introspection) that a resear-
cher imagination is perhaps often based, as the word
suggest, on mental images - and AIV is just a straight-
forward projection of such mental images to a display
of a computer.
Due to the space restriction, we give just one ex-
ample - Fortune’s algorithm (Fortune, 1987) for Voro-
noi diagram in the plane. There are several animations
of the algorithm in the web, see (Teller, 1993; F1, ; F2,
; F3, ; F4, ; F5, ; F6, ; F7, ) - the reader is invited to
look at them. It can be seen that the Voronoi diagram
is eventually drawn, but the animations give absolu-
tely no idea what the moving arcs mean and why and
how they construct the diagram.
The algorithmic idea behind the method is fol-
lowing: imagine the plane containing sites are em-
bedded as a horizontal plane into the 3-dimensional
space. For each site, create a circular cone that has a
vertical axis and uses the site as its apex. Observe the
Figure 5: Fortune’s algorithm - planar visualization.
Figure 6: Fortune’s algorithm - cones (vertical view).
cone surfaces vertically from the infinity (to avoid ef-
fects of perspective). The intersections of cones pro-
ject to the site plane as the Voronoi diagram we are
looking for. Moreover, if the “mountains” of the co-
nes are swept by an inclined plane, the intersection of
the plane with the visible parts of the cones appear as
the arcs that are visible in the planar animations (Tel-
ler, 1993; F1, ; F2, ; F3, ; F4, ; F5, ; F6, ; F7, ) and
Fig. 5. We tried to show this in Figs. 5,6,7,8,9, but the
reader is invited to look kindly to (Ku
ˇ
cera, ), where he
or she can see a full visualization of the 3D situation.
5 SOFTWARE OF ALGORITHM
VISUALIZATION
A dynamic visualization system for algorithm anima-
tion should satisfy the following conditions:
• Animation speed - the system should be able to
present a good dynamic visualization.
Figure 7: Fortune’s algorithm - cones (general view).
Visualization of Abstract Algorithmic Ideas
501
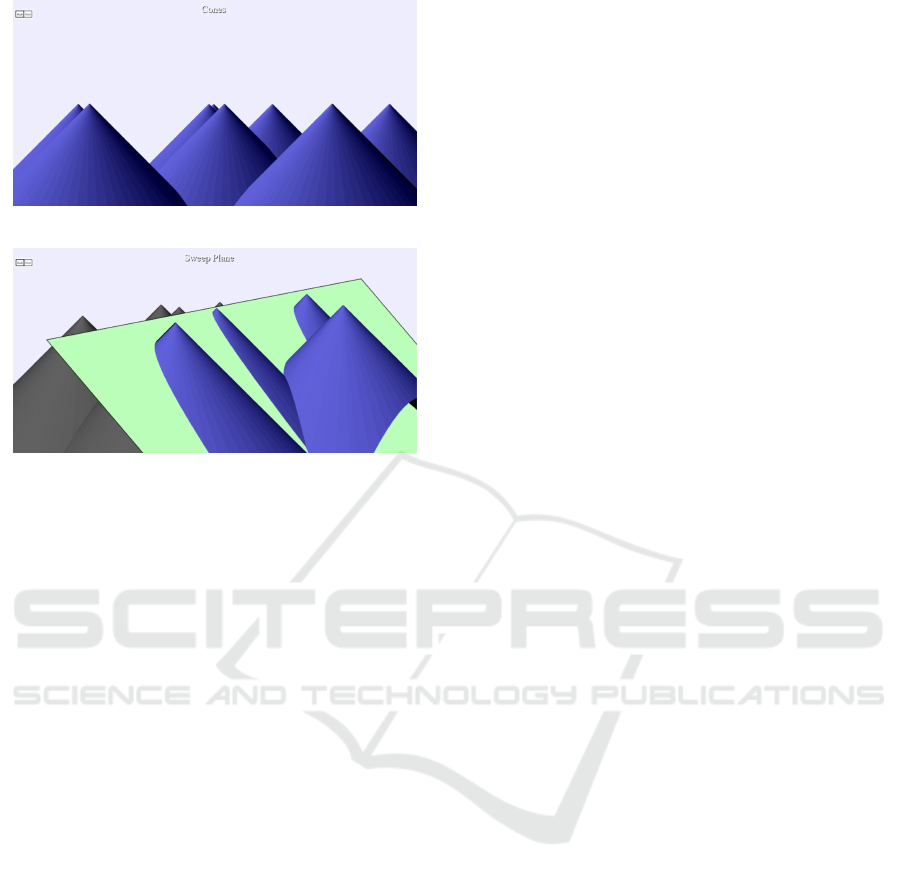
Figure 8: Fortune’s algorithm - cones (horizontal view).
Figure 9: Fortune’s algorithm - sweep plane.
• Programming effort - it should be easy to write
a visualization code.
• Widespread access - it must be easy to run a vi-
sualization code without (much of) downloading
and installing software.
Of course, the first condition is the principal one:
in many cases, a visualization involves a continuous
transformation of the displayed picture, and it might
be computationally very demanding to deliver at least
20-25 frames per second to guarantee a smooth ani-
mation. A failure in this point would make the system
useless.
Programming languages can be divided into three
classes:
• Compiled languages - a code written by a pro-
grammer is compiled into the machine language
and runs at the maximum possible speed. Exam-
ples are the languages C and C++ that also offer
libraries of graphical functions (e.g., graphics.h).
• Semi-compiled languages - The code written by
a programmer is transformed into a simpler code
that is then interpreted by a special software. An
example is Java - the intermediate code is inter-
preted by JVM program (Java Virtual Machine)
• Interpreted languages - the runtime system re-
ads human written program instructions in run-
time and interpret them. An example is JavaS-
cript, see below.
There are really big differences in the speed
among the above classes. While one simple in-
struction is often executed in just several machine
clock tacts, if the same instruction is interpreted, the
software must first read and parse the corresponding
code, use tables to find the equivalent machine in-
struction, and only after that the instruction is execu-
ted. Interpreted languages are often several order of
magnitude slower than compiled languages.
Typical animations that can be found in the web
are quite simple and computationally almost trivial.
Consequently, practically any system that allows dy-
namic animation can be used, preference is given to
simple scripting languages.
However, a why visualization using algorithm
invariant visualization or any other method of vi-
sual presentation of the underlying algorithmic idea,
require sometimes computationally very demanding
processing. E.g., the visualization of Fortune’s algo-
rithm involves a 3D representation of the scene that is
composed of up to several tens of cone surfaces, each
in turn composed of several hundred of triangles (in
order to generate light effects). Moreover, user ma-
nipulation of the surface (rotation, changing between
vertical, general, and horizontal view) as well as an
animation of the plane sweep should be presented as
a smooth movie, which means that the system must
be able to deliver at least 20 frames per second. This
would suggest that at least a semi-compiled graphical
language should be used.
The bad news is that the first condition is in a
strong conflict with the third condition of widespread
access: a compiled code is always specific for a par-
ticular type of processors, and a very large number of
compiled versions would be necessary to cover at le-
ast the majority of potential users. This is why the
source code is usually distributed, and a user has to
look for a compiler of the source language by himself
or herself, learn how to use it etc., which strongly li-
mits the scope of users that are able and willing to do
such installation.
The good news is that the computing power of the
recent processors is so many times higher than the real
needs of most users (perhaps with the exception of ga-
mers) that even quite slow interpreted languages are
fast enough to deliver quite good and smooth anima-
tions.
Fortunately, algorithm visualizations for teaching
purposes use small input sizes - graphs with up to se-
veral tens of nodes, matrices and vectors with few tens
of rows only, etc. which makes using interpreted lan-
guages possible.
The present paper reflects our experience with
an algorithm visualization system that has originally
been written in Java - a high level semi-compiled and
very powerful language. Unfortunately, Java appears
CSEDU 2018 - 10th International Conference on Computer Supported Education
502

to be too powerful in some situation and very strict
security measures are necessary if it is used as a web
application, and those security measures make using
Java much less comfortable now than it was 20 years
ago. Moreover, Java Virtual Machine must be instal-
led in a web browser or in a computer that would run
visualizations off-line, and this, even if it is a relati-
vely simple task, restricts the scope of users.
This is why we are moving the system from Java
to JavaScript using the fact that the latter language
is essentially ubiquitous - it is difficult to imagine a
personal computer without a web browser (Chrome,
Mozilla, Explorer, Opera, etc.), and all standard web
browser come with a JavaScript interpreter (which is
enabled by default). A user does not need to do more
than to find the proper web page and perform 3 ob-
vious clicks to open a selected visualization of our
collection. In this way, our system is going to be avai-
lable to literally any user of the web and requires no
installation of any software (assuming that a browser
is available).
At the present time we have moved the most com-
putationally difficult item of our collection - visua-
lization of Fortune’s algorithm for finding a Voronoi
diagram in the plane - from Java to JavaScript. The
visualization of Fortune involves a very complex 3D
visualization of a surface composed of a number of
cones under light coming from the left. It is substan-
tially more difficult that other 3D visualization of our
collection. The application allows a user to rotate the
surface in two directions and animate sweeping the
surface by an inclined plane, and we have found that
a JavaScript code is executed sufficiently fast even
on smart-phones and tablets (which, fortunately, have
smaller displays, which limits the size and complexity
of the displayed scene).
The reviewer is kindly invited to play with the vi-
sualization of Fortune algorithm at the URL (Ku
ˇ
cera,
) to see that the speed of simulation might be limi-
ting if the number of sites is too high, but it is quite
sufficient for the standard educational use.
Thus, the first condition has a threshold nature - if
the hardware is fast enough to compensate the inter-
preter slow-down for inputs of sizes typical for educa-
tional purposes, it is possible to forget it and concen-
trate on the third condition that can be fully satisfied
by a graphical script language that is embedded into
all standard web browsers.
There is still the second condition - how much pro-
grammer’s time and effort is needed. The second con-
dition is also in contradiction to the last one - simple
interpreted script languages are designed for writing
simple applications, but good algorithm visualization
with educational value could be quite complex soft-
ware products of thousands code lines. It would be
much more convenient to write such large codes in
an object-oriented language with a strict type control
(like Java and C++) that is supported by advanced de-
velopment tools (like Eclipse and Net Beans). There
are also extensions of script languages that bring at
least a part of the comfort of more advances systems.
However, we have found another tool that makes
writing JavaScript algorithm visualizations relatively
easy and fast - a strong programmer’s discipline. An
experienced programmer that is able to write natural
and easy readable programs, does not need to be ob-
served and directed by a development environment,
and avoids seductions of ‘easy’ tricks of script langua-
ges, is not much less productive in JavaScript than,
e.g., in Java. A benefit is a code that can be run by
essentially each web user without any system instal-
lations.
REFERENCES
Algoanim. algoanim.ide.sk.
AlgoLiang. cs.armstrong.edu/liang/animation/animation.html.
Algomation. www.algomation.com.
Algoviz. www.algoviz.org/biblio/authors; (a super-
reference: a web page containing several hundreds
of references to algorithm visualizations and anima-
tions).
bassat Levy, R. B. and Ben-Ari, M. (2007). We work so hard
and they don’t use it: acceptance of software tools by
teachers. In ITiCSE ’07: Proceedings of the 12th an-
nual SIGCSE conference on Innovation and techno-
logy in computer science education, Dundee, Scot-
land. ACM Press.
Brown, M. and Sedgewick, R. (1985). Techniques for algo-
rithm animation. IEEE Software, 2:28–39.
Brown, M. H. (1988). Algorithm Animation. MIT Press.
Cormen, T. H., Leiserson, C. E., Rivest, R. L., and Stein, C.
(2001). Introduction to Algorithms, 2nd edition. The
MIT Press, Cambridge, Massachusetts, and McGraw
Hill, Boston.
DD1. A demo in en.wikipedia.org/wiki/dijkstra’s algorithm.
DD11. jhave.org/algorithms/graphs/dijkstra/dijkstra.shtml.
DD2. www.cs.usfca.edu/ galles/visualization/dijkstra.html.
DD3. people.ok.ubc.ca/ylucet/ds/dijkstra.html.
DD4. www-m9.ma.tum.de/graph-algorithms/spp-
dijkstra/index en.html.
DD5. qiao.github.io/pathfinding.js/visual/.
DD6. pckujawa.github.io/portfolio/net-dijkstra/.
DY1. www.youtube.com/watch?v=pvfj6mxhdmw.
DY10. www.youtube.com/watch?v=kvrwplnioem.
DY11. www.youtube.com/watch?v=cl1bylngb5q.
DY12. www.youtube.com/watch?v= lhsawdgxpi.
DY13. www.youtube.com/watch?v=wt5cqvfdyxg.
DY14. www.youtube.com/watch?v=0nvyi3o161a.
Visualization of Abstract Algorithmic Ideas
503

DY15. www.youtube.com/watch?v=lfb8qkxzhy0.
DY16. www.youtube.com/watch?v=1057z9xtfcs.
DY17. www.youtube.com/watch?v=ug7vmpwkjma.
DY18. www.youtube.com/watch?v=kowij71jdc4.
DY19. www.youtube.com/watch?v=cbow7y2udq8.
DY2. www.youtube.com/watch?v=gdmfowyqlci.
DY20. www.youtube.com/watch?v=mv4r7f82doa.
DY3. www.youtube.com/watch?v=wn3rb9wvydy.
DY4. www.youtube.com/watch?v=5gt5hyzjnoo.
DY5. www.youtube.com/watch?v=jwemgqncz8q.
DY6. www.youtube.com/watch?v=8ls1rqhcopw.
DY7. www.youtube.com/watch?v=p4ukmd1tfri.
DY8. www.youtube.com/watch?v=laxzgercdf4.
DY9. www.youtube.com/watch?v=4xrotuo1xaw.
F1. www.raymondhill.net/voronoi/rhill-voronoi.html.
F2. tech.io/playgrounds/243/voronoi-diagram/fortunes-
algorithm.
F3. www.diku.dk/hjemmesider/studerende/duff/fortune.
F4. philogb.github.io/blog/2010/02/12/voronoi-tessellation.
F5. www.youtube.com/watch?v=k2p9ywsmaxe.
F6. www.youtube.com/watch?v=kuqriq3mzcy.
F7. www.youtube.com/watch?v=pcaxgsc-gx.
Fortune, S. (1987). A sweepline algorithm for voronoi dia-
grams. Algorithmica, 2:153–174.
Ku
ˇ
cera, L. www.algovision.org.
Makohon, I., Nguyen, D. T., Sosonkina, M., Shen, Y., and
Ng, M. (2016). Java based visualization and anima-
tion for teaching the dijkstra shortest path algorithm
in transportation networks. Int. J. Software Eng. &
Appl., 7(3):11–25.
Teller, S. J. (1993). Visualizing fortune’s sweepline algo-
rithm for planar voronoi diagrams. In Symposium on
Computational Geometry, San Diego, page 393.
VisuAlgo. visualgo.net.
CSEDU 2018 - 10th International Conference on Computer Supported Education
504
