
Framework for the Recognition of Activities of Daily Living and
Their Environments in the Development of a
Personal Digital Life Coach
Ivan Miguel Pires
1,2,3
, Nuno M. Garcia
1
, Nuno Pombo
1
and Francisco Flórez-Revuelta
4
1
Instituto de Telecomunicações, Universidade da Beira Interior, Covilhã, Portugal
2
Altranportugal, Lisbon, Portugal
3
ALLab - Assisted Living Computing and Telecommunications Laboratory, Computer Science Department,
Universidade da Beira Interior, Covilhã, Portugal
4
Department of Computer Technology, Universidad de Alicante, Spain
Keywords: Activities of Daily Living, Sensors, Mobile Devices, Data Fusion, Feature Extraction, Pattern Recognition.
Abstract: Due to the commodity of the use of the off-the-shelf mobile devices and technological devices by ageing
people, the automatic recognition of the Activities of Daily Living (ADL) and their environments using these
devices is a research topic were studied in the last years, but this project consists in the creation of an automatic
method that recognizes a defined dataset of ADL using a large set of sensors available in these devices, such
as the accelerometer, the gyroscope, the magnetometer, the microphone and the Global Positioning System
(GPS) receiver. The fusion of the data acquired from the selected sensors allows the recognition of an
increasing number of ADL and environments, where the ADL are mainly recognized with motion, magnetic
and location sensors, but the environments are mainly recognized with acoustic sensors. During this project,
several methods have been researched in the literature, implementing three types of neural networks, these
are Multilayer Perceptron (MLP) with Backpropagation, Feedforward neural network (FNN) with
Backpropagation and Deep Neural Networks (DNN), verifying that the neural networks that report highest
results are the DNN method for the recognition of ADL and standing activities, and the FNN method for the
recognition of environments.
1 INTRODUCTION
Mobile devices has several sensors embedded that are
capable for the acquisition of physical and
physiological parameters for the recognition of
Activities of Daily Living (ADL) and their
environments. The sensors commonly available in the
off-the-shelf mobile devices are the accelerometer,
the gyroscope, the magnetometer, the microphone,
and the Global Positioning System (GPS) receiver.
The use of these sensors in a system for the
monitoring of the lifestyle and/or the elderly people,
and the training of the lifestyles is included in the
research about the Ambient Assisted Living (AAL)
systems.
These sensors are available in the equipments
used daily, but their capabilities are not widely
explored, and this paper presents the development of
a new framework for the recognition of ADL and
their environments (Pires et al., 2016-a; Pires et al.,
2015; Pires et al., 2016-b), taking in account the
limitations of these devices, but achieving reliable
results for further implementation in the development
of a personal digital life coach (Garcia, 2016). As
presented in the figure 1, this framework has several
stages, such as data acquisition, data processing, data
fusion, and classification methods. This project is
already started and some results were achieved,
exploring the use of several types of neural networks
in the recognition of the ADL and their environments,
these are the Multilayer Perceptron (MLP) with
Backpropagation, the Feedforward neural network
(FNN) with Backpropagation, and the Deep Neural
Networks (DNN). The currently achieved results are
available in (Pires et al., 2017 (In Review)-a; Pires et
al., 2017 (In Review)-b; Pires et al., 2017 (In
Review)-c; Pires et al., 2017 (In Review)-d) and the
data acquired for the experiments are available in a
free repository (ALLab, 2017).
Pires, I., Garcia, N., Pombo, N. and Flórez-Revuelta, F.
Framework for the Recognition of Activities of Daily Living and Their Environments in the Development of a Personal Digital Life Coach.
DOI: 10.5220/0006824301630170
In Proceedings of the 7th International Conference on Data Science, Technology and Applications (DATA 2018), pages 163-170
ISBN: 978-989-758-318-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
163
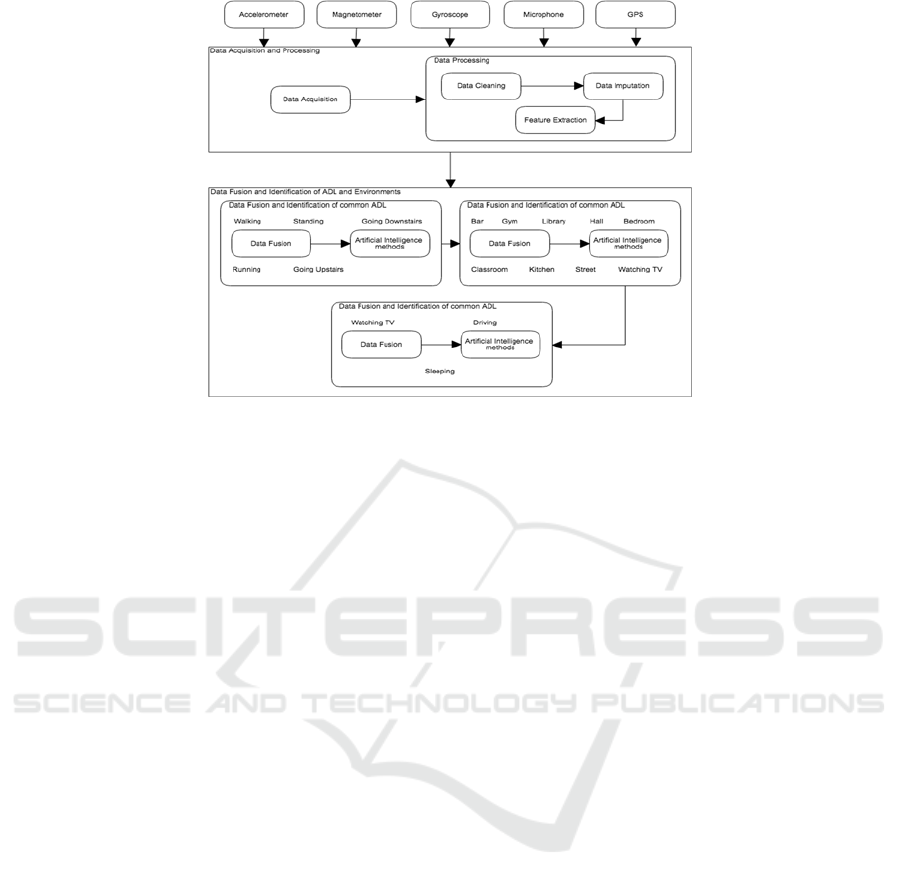
Figure 1: Workflow of the proposed framework for the recognition of ADL and their environments.
2 RELATED WORK
2.1 Data Acquisition and Processing
2.1.1 Data Acquisition
Data acquisition process using mobile devise is
commonly performed without the use of frameworks,
but there are some studies using frameworks, e.g.,
Acquisition Cost-Aware QUery Adaptation
(ACQUA) that performs dynamic modification in the
order of the data acquisition and the streams
requested from the different sensors (Lim et al.,
2012). However, in the major part of the studies, the
data acquisition does not use a framework for the data
acquisition, reading directly the data from each sensor
available (Scalvini et al., 2013).
2.1.2 Data Cleaning
The data cleaning is the process to filter the data
acquired from the sensors in order to remove or fix
the incorrect values commonly named as noise, using
different types of filters based on the type of data
acquired (Jeffery et al., 2006). Firstly, for the data
acquired from the accelerometer, gyroscope and
magnetometer sensors, the filter that is commonly
applied are the low pass filter (Graizer, 2012).
Finally, for the data acquired from the microphone,
the filter that is commonly applied is the Fast Fourier
Transform (FFT) (Rader and Brenner, 1976) for the
extraction of the frequencies.
2.1.3 Data Imputation
During the data acquisition, several factors may cause
the loss of the data, the hardware fails, the positioning
of the mobile device, the different sampling rate
between the several sensors used, and the number of
sensors used (Bersch et al., 2014). Our previous study
(Pires et al., 2016-a) presents several methods for the
performance of the validation of the data acquired,
that may have different types, these are Missing
Completely At Random (MCAR), Missing At
Random (MAR) and Missing Not At Random
(MNAR) (Vateekul and Sarinnapakorn, 2009).
Based on the literature, the most used method for
the imputation of the sensors’ data is the K-Nearest
Neighbor (k-NN) and their variants (García-Laencina
et al., 2009), but there are other methods used for data
imputation, these are mean imputation (MEI)
(Rahman et al., 2015), multiple imputation (Ni et al.,
2005), linear regression (D’Ambrosio et al., 2012),
logistic regression (D’Ambrosio et al., 2012), among
others.
2.1.4 Feature Extraction
There are several studies that uses different features,
based on the purpose of the study and the sensors
used, but the correct definition of the features is
important to improve the accuracy of the methods for
the recognition of the different ADL.
Related to the extraction of the features from the
accelerometer, gyroscope and magnetometer sensors,
the most extracted features are the mean (Liu et al.,
2016), the variance (Liu et al., 2016), the maximum
DATA 2018 - 7th International Conference on Data Science, Technology and Applications
164

(Liu et al., 2016), the minimum (Liu et al., 2016), the
standard deviation (Liu et al., 2016), the average time
between peaks (Kumar and Gupta, 2015), among
others.
Related to the extraction of the features from the
microphone data, the most extracted features are the
average value (Hon et al., 2015), the threshold value
(Hon et al., 2015), the minimum value (Hon et al.,
2015), the maximum value (Hon et al., 2015), and
Mel-frequency cepstrum coefficients (MFCC) (Sert
et al., 2006)
Related to the extraction of the features from the
GPS receiver, the most extracted features are the
distance travelled (Shoaib et al., 2013), the speed
(Shoaib et al., 2013), and the location (Shoaib et al.,
2013; Zou et al., 2016).
2.2 Data Fusion and Classification
2.2.1 Recognition of Common ADL
After the extraction of several features from the
accelerometer, magnetometer and gyroscope sensors,
they need to be fused for the application of
classification methods for the recognition of ADL.
The authors of (Guo et al., 2016) recognized the
sitting, standing, walking, walking on stairs, and
running activities, using the accelerometer,
gyroscope and magnetometer sensors’ data and
applying the Random Forest classifier with several
features, such as the variance, the mean, the
frequency of the point with maximum amplitude, the
energy of the extremum value, the mean of the
extremum value, the sum of the difference between
extremum values, among others.
The authors of (Shoaib et al., 2013) used several
methods, including Artificial Neural Networks
(ANN), Support Vector Machine (SVM), Naïve
Bayes, Logistic regression, decision tree, k-NN, and
rule based classifiers, for the recognition of sitting,
standing, walking, walking on stairs, and running
activities, using the mean and the standard deviation
as features extracted from the accelerometer,
magnetometer and gyroscope sensors.
In (Elhoushi, Georgy, Wahdan, Korenberg, and
Noureldin, 2014), several features were extracted
from the accelerometer, magnetometer, and
gyroscope sensors, including the mean, the median,
the variance, the standard deviation, the inter-quartile
range, the Zero-Crossing Rate and the number of
peaks, and they implemented a decision tree method
for the recognition of walking on stairs, walking on
an escalator, standing and taking an elevator.
2.2.2 Recognition of Environments
After the extraction of several features from the
microphone and other sensors, they need to be fused
for the application of classification methods for the
recognition of environments and other ADL. The
authors of (Lane et al., 2011) extracted the spectral
roll-off from the microphone data and other features
extracted from the other sources used for the correct
recognition of walking, sleeping, running, standing,
and social interaction activities, based on the
environment, using linear and logistic regression
methods.
The authors of (Mengistu et al., 2016) used the
Support Vector Machine (SVM) and Gradient
Boosting Decision Tree methods with the zero-
crossing rate, the total spectrum power, the sub-band
powers, the spectral centroid, the spectral spread, the
spectral flux, the spectral roll-off, and the Mel-
Frequency Cepstral Coefficients (MFCC) as features
extracted from the microphone and other features
extracted from other sources for the recognition of
standing, lying, walking, walking on stairs, jogging,
drinking and running activities based on the
environment.
In (Nishida et al., 2015), the Gaussian mixture
model (GMM) was used with the log power and the
MFCC as features extracted from the microphone for
the recognition of cycling, cleaning table, shopping,
travelling by car, going to toilet, cooking, watching
television, eating, driving, working on a computer,
reading, and sleeping activities based on the
environment.
The accelerometer and the microphone was used
by the authors of (Filios et al., 2015) for the
recognition of several activities based on the
environment, including shopping, waiting in a queue,
driving, travelling by car, cleaning with a vacuum
cleaner, cooking, washing dishes, working at a
computer, sleeping, watching television, being a bar,
sitting, walking, standing, lying, and standing,
extraction the mean, the standard deviation, the range,
the angular degree, and the MFCC as features for the
application of decision tree methods and the IBk lazy
algorithm.
2.2.3 Recognition of Standing Activities
After the extraction of several features from the GPS
receiver and other sensors, they need to be fused for
the application of classification methods for the
recognition of ADL. The authors of (Shoaib et al.,
2013) used several methods, including ANN, SVM,
Naïve Bayes, Logistic regression, decision tree, k-
NN, and rule based classifiers, for the recognition of
Framework for the Recognition of Activities of Daily Living and Their Environments in the Development of a Personal Digital Life Coach
165

sitting, standing, walking, walking on stairs, and
running activities, using the distance, the location and
the speed as features extracted from the GPS receiver,
and other features extracted from other sensors.
The distance the location and the speed are also
extracted from the GPS receiver by the authors of
(Hung et al., 2014), and other features were extracted
from other sensors in order to recognize walking,
standing, walking on stairs, lying and running
activities, using J48 decision tree, Logistic
Regression, ANN, and SVM methods.
In (Altini et al., 2014), the SVM method was
implemented with the altitude difference in meters
and speed extracted as features from the GPS receiver
and other features extracted from other sources, in
order to recognize sitting, standing, washing dishes,
walking on stairs, cycling, and running.
The authors of (Luštrek et al., 2015) extracted the
distance between to access points was inputted as
feature from the GPS receiver and other features were
extracted from other sources, using the Naïve Bayes,
C4.5 decision tree, RIPPER, SVM, Random Forest,
Bagging, AdaBoost and Vote methods for the
recognition of sleeping, standing, preparing food,
eating, working, jogging, and travelling.
3 METHODS
3.1 Data Acquisition and Processing
3.1.1 Data Acquisition
This step includes the development of a mobile
application that acquires the data from several sources
available in the Android devices, these are
accelerometer, gyroscope, magnetometer,
microphone and GPS receiver. The data was acquired
in a background process and in real life environment
with the mobile device in the pocket for the
recognition of the signal of the sensors. The
population included in the experiments is aged
between 16 and 60 years old, performing several
activities and providing their feedback with the
selection of the activity performed. The ADL
included in this study are sleeping, walking on stairs,
walking, running, standing and driving. In addition,
the environments recognized are bar, gym, kitchen,
classroom, library, hall, street, bedroom, and
watching TV. The data acquired for this project is
available in a free repository (ALLab, 2017).
3.1.2 Data Cleaning
The application of the data cleaning methods depends
on the type of sensors used during the data acquisition
method presented in the section 3.1.1. When the study
is based on data acquired from the motion and
magnetic sensors, e.g., accelerometer, gyroscope and
magnetometer sensors, the best method for the data
cleaning process is the low pass filter (Graizer, 2012).
However, when the study makes use of acoustic data,
the best method for the data cleaning is based on the
extraction of the relevant frequencies using the Fast
Fourier Transform (FFT) (Rader and Brenner, 1976).
Related to the location sensors’ data, the data cleaning
methods are not useful for the improvement of the
recognition of ADL and their environments.
3.1.3 Data Imputation
The imputation of the sensors’ data acquired with the
mobile application may improve the reliability of the
framework for the recognition of ADL and their
environments. There are some problems that can be
minimized with data imputation methods, where the
most used methods are the mean imputation (MEI)
(Rahman et al., 2015), and the K-Nearest Neighbor
(k-NN) (García-Laencina et al., 2009).
3.1.4 Feature Extraction
After the application of the methods presented in the
previous sections and based on the sensors used in the
framework for the recognition of ADL and their
environments, we are able to extract the different
features, these are:
Accelerometer, gyroscope and magnetometer
sensors’ data (stage 1): 5 greatest distances
between the maximum peaks, average, standard
deviation, variance and median of the maximum
peaks, standard deviation, average, variance,
maximum, minimum and median of the raw
signal;
Microphone data (stage 2): 26 MFCC
coefficients, standard deviation, average,
maximum, minimum, variance and median of the
raw signal;
Accelerometer, gyroscope and magnetometer
sensors’ data, microphone data and GPS receiver
data (stage 3): 5 greatest distances between the
maximum peaks, average, standard deviation,
variance and median of the maximum peaks,
standard deviation, average, variance, maximum,
minimum and median of the raw signal for the
accelerometer, gyroscope and magnetometer
DATA 2018 - 7th International Conference on Data Science, Technology and Applications
166
sensors, the environment recognized, and the
distance and location extracted from the GPS
receiver.
3.2 Data Fusion and Classification
The proposed study includes the use of different types
of neural networks in order to identify the best
methods for each stage of the implementation of the
framework for the recognition of ADL and their
environments. The types of neural networks selected
for the experiments are:
MLP method, applied with Neuroph framework
(Neuroph, 2017);
FNN method, applied with Encog framework
(Research, 2017);
DNN method, applied with DeepLearning4j
framework (Nicholson, 2017).
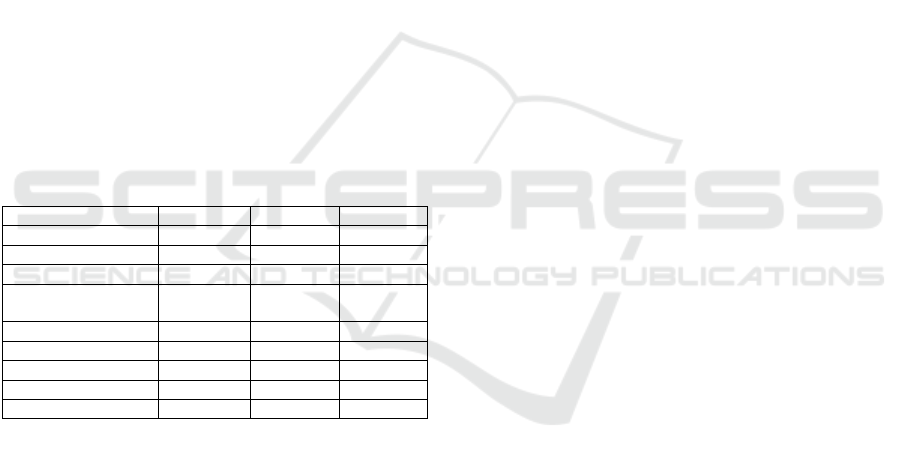
Table 1 summarizes the configurations of the neural
networks studied for the development of the
framework for the recognition of ADL and their
environments, which all of the neural networks
implemented use the Sigmoid as activation function
and backpropagation.
Table 1: Configurations of the classification methods.
Parameters MLP FNN DNN
Activation function Sigmoid Sigmoid Sigmoid
Learning rate 0.6 0.6 0.1
Momentum 0.4 0.4 N/A
Maximum number
of training iterations
4 x 10
6
4 x 10
6
4 x 10
6
Number of layers 1 1 3
Weight function N/A N/A Xavie
r
Seed value N/A N/A 6
Backpropagation Yes Yes Yes
Regularization N/A N/A L
2
3.2.1 Recognition of Common ADL
This stage includes the use of accelerometer,
magnetometer and gyroscope sensors for the
recognition of the most common ADL, these are
walking on stairs, running, walking and standing. For
this research, we implemented the three types of
neural networks presented in the section 3.2 with
normalized and non-normalized data as well as with
different sets of features. The normalization of the
data depends on the type of neural network
implements, and, for the implementation of the MLP
and Feedforward networks with Backpropagation, the
normalization method used was the MIN/MAX
normalizer (Jain et al., 2005), and, for the
implementation of the DNN method, the
normalization with mean and standard deviation
(Brocca et al., 2010) and the application of the L
2
regularization (Ng, 2004) were performed.
3.2.2 Recognition of Environments
This stage includes the use of the microphone data for
the recognition of the environments, these are bar,
gym, kitchen, classroom, library, hall, street,
bedroom, and watching TV. For this research, we
implemented the three types of neural networks
presented in the section 3.2 with normalized and non-
normalized data as well as with different sets of
features. The normalization of the data depends on the
type of neural network implements, and, for the
implementation of the MLP and FNN methods, the
normalization method used was the MIN/MAX
normalizer (Jain et al., 2005), and, for the
implementation of the DNN method, the
normalization with mean and standard deviation
(Brocca et al., 2010) and the application of the L
2
regularization (Ng, 2004) were performed.
3.2.3 Recognition of Standing Activities
This stage includes the use of accelerometer,
magnetometer and gyroscope sensors’ data, the
environment recognized with the method
implemented in the section 3.2.2, and the distance and
location features extracted from the GPS receiver for
the recognition of standing activities, these are
sleeping, driving and watching TV. For this research,
we implemented the three types of neural networks
presented in the section 3.2 with normalized and non-
normalized data as well as with different sets of
features. The normalization of the data depends on the
type of neural network implements, and, for the
implementation of the MLP and FNN methods, the
normalization method used was the MIN/MAX
normalizer (Jain et al., 2005), and, for the
implementation of the DNN method, the
normalization with mean and standard deviation
(Brocca et al., 2010) and the application of the L
2
regularization (Ng, 2004) were performed.
4 RESULTS
4.1 Recognition of Common ADL
For the development of the method for the
recognition of the common ADL, the reported results
with the different number of sensors allowed and with
normalized and non-normalized data are presented in
the tables 2 and 3.
Framework for the Recognition of Activities of Daily Living and Their Environments in the Development of a Personal Digital Life Coach
167
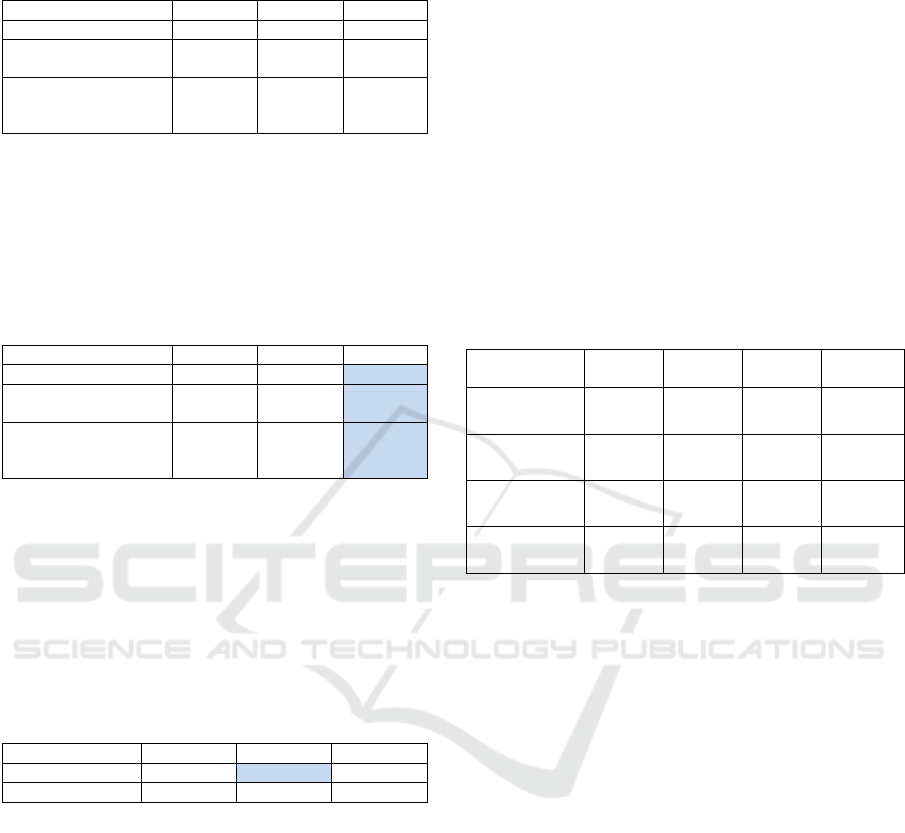
Table 2: Classification accuracies with non-normalized data
for common ADL.
MLP FNN DNN
Accelerometer 34.76% 74.45% 80.35%
Accelerometer and
Magnetometer
35.15% 42.75% 70.43%
Accelerometer,
Magnetometer and
Gyroscope
38.32% 76.13% 74.47%
As verified the best method for the different
number of sensors is the DNN method with
normalized data, where the reported results are
highlighted in the table 3, and they are between
85.89% and 89.51%.
Table 3: Classification accuracies with normalized data for
common ADL.
MLP FNN DNN
Accelerometer 24.03% 37.07% 85.89%
Accelerometer and
Magnetometer
24.93% 64.94%
86.49%
Accelerometer,
Magnetometer and
Gyroscope
37.13% 29.54%
89.51%
4.2 Recognition of Environments
For the development of the method for the
recognition of the environments, the reported results
with normalized and non-normalized data are
presented in the table 4, verifying that the best results
are achieved with the FNN method with non-
normalized data, reporting an accuracy of 86.50%.
Table 4: Classification accuracies with acoustic data.
MLP FNN DNN
Non-normalized 12.86% 86.50% 48.11%
Normalized 19.43% 82.75% 4.74%
4.3 Recognition of Standing ADL
The results of the recognition of the standing ADL
depends on the correct recognition of the common
ADL as standing, because, based on the environment
recognized and/or the distance travelled, the standing
ADL are recognized with a reported accuracy of
100%, based on the results of the DNN method with
normalized data.
4.4 Overall Results
The development of the proposed framework for the
recognition of ADL and their environments explored
several scenarios, showing the accuracies reported by
the selected method for each scenarios, where a sce-
nario is a combination of sensors used. They are:
A. Use of the accelerometer;
B. Use of the accelerometer and the magnetometer;
C. Use of the accelerometer, the magnetometer and
the gyroscope;
D. Use of the microphone;
E. Use of the environment recognized and/or the
GPS receiver.
Table 5 shows the accuracies of the selected method,
presenting the accuracy of the proposed framework
that, based on the number of sensors available, is
between 90.80% and 92%. Finally, the average
accuracy of the framework is 91.27%.
Table 5: Classification accuracies of the proposed
framework.
Stages
A / D /
E
B / D /
E
C / D /
E
Average
accuracy
Common
ADL
85.89% 86.49% 89.51% 87.30%
Environments 86.50% 86.50% 86.50% 86.50%
Standing
activities
100.00% 100.00% 100.00% 100.00%
Average
accuracy
90.80% 91.00% 92.00% 91.27%
5 CONCLUSIONS
The recognition of ADL and their environments using
the commodity off-the-shelf mobile is a project that
allows the training and monitoring of lifestyles with
reliable accuracy and the reducing costs in the
monitoring of elderly people and/or the physical
training as a personal trainer.
Several research have been performed using small
sets of sensors, but the current state of this project
probes that the use of a major number of sensors
increases the number of ADL and environments
recognized and the accuracy of the recognition.
The current development of this project using the
data available in (ALLab, 2017) and neural networks
reports an accuracy around 91.27%, complaining the
several stages of the treatment and analysis of the
sensors’ data.
As future work, the implementation of data
imputation methods and other classification methods,
including Adaboost and Support Vector Machines
(SVM), reveals important to attempt to increase the
reliability of the framework, improving the quality of
the data acquired. The development of the method
should take in account the limitations of the mobile
DATA 2018 - 7th International Conference on Data Science, Technology and Applications
168

devices. However, the ongoing results proves that the
combination of the different types of neural networks
achieves reliable results in the recognition.
ACKNOWLEDGEMENTS
This work was supported by FCT project
UID/EEA/50008/2013 (Este trabalho foi suportado
pelo projecto FCT UID/EEA/50008/2013).
The authors would also like to acknowledge the
contribution of the COST Action IC1303 – AAPELE
– Architectures, Algorithms and Protocols for
Enhanced Living Environments.
REFERENCES
ALLab. (2017). August 2017- Multi-sensor data fusion in
mobile devices for the identification of activities of
daily living - ALLab Signals. Retrieved from
https://allab.di.ubi.pt/mediawiki/index.php/August_20
17-_Multi-sensor_data_fusion_in_mobile_devices_
for_the_identification_of_activities_of_daily_living.
Altini, M., Vullers, R., Van Hoof, C., van Dort, M., and
Amft, O. (2014). Self-Calibration of Walking Speed
Estimations Using Smartphone Sensors. 2014 Ieee
International Conference on Pervasive Computing and
Communications Workshops (Percom Workshops), 10-
18. doi:10.1109/PerComW.2014.6815158.
Bersch, S. D., Azzi, D., Khusainov, R., Achumba, I. E., and
Ries, J. (2014). Sensor data acquisition and processing
parameters for human activity classification. Sensors
(Basel), 14(3), 4239-4270. doi:10.3390/s140304239.
Brocca, L., Melone, F., Moramarco, T., Wagner, W.,
Naeimi, V., Bartalis, Z., and Hasenauer, S. (2010).
Improving runoff prediction through the assimilation of
the ASCAT soil moisture product. Hydrology and
Earth System Sciences, 14(10), 1881-1893.
doi:10.5194/hess-14-1881-2010.
Chris Nicholson, A. (2017). Deeplearning4j: Open-source,
Distributed Deep Learning for the JVM. Retrieved
from https://deeplearning4j.org/
D’Ambrosio, A., Aria, M., and Siciliano, R. (2012).
Accurate Tree-based Missing Data Imputation and Data
Fusion within the Statistical Learning Paradigm.
Journal of Classification, 29(2), 227-258.
doi:10.1007/s00357-012-9108-1.
Elhoushi, M., Georgy, J., Wahdan, A., Korenberg, M., and
Noureldin, A. (2014). Using Portable Device Sensors to
Recognize Height Changing Modes of Motion. 2014
Ieee International Instrumentation and Measurement
Technology Conference (I2mtc) Proceedings, 477-481.
doi:10.1109/i2mtc.2014.6860791.
Filios, G., Nikoletseas, S., Pavlopoulou, C., Rapti, M., and
Ziegler, S. (2015). Hierarchical Algorithm for Daily
Activity Recognition via Smartphone Sensors. 2015
IEEE 2nd World Forum on Internet of Things (Wf-Iot),
381-386. doi:10.1109/WF-IoT.2015.7389084.
Garcia, N. M. (2016). A Roadmap to the Design of a
Personal Digital Life Coach ICT Innovations 2015:
Springer.
García-Laencina, P. J., Sancho-Gómez, J.-L., Figueiras-
Vidal, A. R., and Verleysen, M. (2009). K nearest
neighbours with mutual information for simultaneous
classification and missing data imputation.
Neurocomputing, 72(7-9), 1483-1493. doi:10.1016/
j.neucom.2008.11.026.
Graizer, V. (2012). Effect of low‐pass filtering and re‐
sampling on spectral and peak ground acceleration in
strong‐motion records. Paper presented at the Proc.
15th World Conference of Earthquake Engineering,
Lisbon, Portugal.
Guo, Q., Liu, B., and Chen, C. W. (2016). A Two-layer and
Multi-strategy Framework for Human Activity
Recognition using smartphone. 2016 IEEE
International Conference on Communications (Icc), 1-
6. doi:10.1109/icc.2016.7511487.
Hon, T. K., Wang, L., Reiss, J. D., and Cavallaro, A. (2015).
Audio Fingerprinting for Multi-Device Self-
Localization. IEEE/ACM Transactions on Audio,
Speech, and Language Processing, 23(10), 1623-1636.
doi:10.1109/TASLP.2015.2442417.
Hung, W. C., Shen, F., Wu, Y. L., Hor, M. K., and Tang, C.
Y. (2014). Activity Recognition with Sensors on
Mobile Devices. Proceedings of 2014 International
Conference on Machine Learning and Cybernetics
(ICMLC), Vol 2, 449-454. doi:10.1109/icmlc.2014.
7009650.
Jain, A., Nandakumar, K., and Ross, A. (2005). Score
normalization in multimodal biometric systems.
Pattern recognition, 38(12), 2270-2285.
doi:10.1016/j.patcog.2005.01.012.
Jeffery, S. R., Alonso, G., Franklin, M. J., Hong, W., and
Widom, J. (2006). Declarative Support for Sensor Data
Cleaning. Paper presented at the Proceedings of
PERVASIVE'06 Proceedings of the 4th international
conference on Pervasive Computing, Dublin, Ireland.
Kumar, A., and Gupta, S. (2015). Human Activity
Recognition through Smartphone’s Tri-Axial
Accelerometer using Time Domain Wave Analysis and
Machine Learning. International Journal of Computer
Applications, 127(18), 22-26.
doi:10.5120/ijca2015906733.
Lane, N. D., Mohammod, M., Lin, M., Yang, X., Lu, H.,
Ali, S., Campbell, A. (2011). Bewell: A smartphone
application to monitor, model and promote wellbeing.
Paper presented at the 5th international ICST
Conference on Pervasive Computing Technologies for
Healthcare.
Lim, L., Misra, A., and Mo, T. (2012). Adaptive data
acquisition strategies for energy-efficient, smartphone-
based, continuous processing of sensor streams.
Distributed and Parallel Databases, 31(2), 321-351.
doi:10.1007/s10619-012-7093-3.
Liu, Y. Y., Zhao, F., Shao, W. H., and Luo, H. Y. (2016).
An Hidden Markov Model based Complex Walking
Framework for the Recognition of Activities of Daily Living and Their Environments in the Development of a Personal Digital Life Coach
169

Pattern Recognition Algorithm. Proceedings of 2016
Fourth International Conference on Ubiquitous
Positioning, Indoor Navigation and Location Based
Services (IEEE Upinlbs 2016), 223-229.
doi:10.1109/upinlbs.2016.7809976.
Luštrek, M., Cvetkovic, B., Mirchevska, V., Kafalı, Ö.,
Romero, A., and Stathis, K. (2015). Recognising
lifestyle activities of diabetic patients with a
smartphone. doi:10.4108/icst.pervasivehealth.
2015.259118.
Mengistu, Y., Pham, M., Do, H. M., and Sheng, W. (2016).
AutoHydrate: A Wearable Hydration Monitoring
System. 2016 IEEE/RSJ International Conference on
Intelligent Robots and Systems (Iros 2016), 1857-1862.
doi:10.1109/iros.2016.7759295.
Neuroph. (2017). Java Neural Network Framework
Neuroph. Retrieved from http://neuroph.sourceforge.
net/
Ng, A. Y. (2004). Feature selection, L 1 vs. L 2
regularization, and rotational invariance. Paper
presented at the Proceedings of the twenty-first
international conference on Machine learning.
Ni, D., Leonard, J. D., Guin, A., and Feng, C. (2005).
Multiple Imputation Scheme for Overcoming the
Missing Values and Variability Issues in ITS Data.
Journal of Transportation Engineering, 131(12), 931-
938. doi:10.1061/(asce)0733-947x(2005)131:12(931).
Nishida, M., Kitaoka, N., and Takeda, K. (2015). Daily
activity recognition based on acoustic signals and
acceleration signals estimated with Gaussian process.
Paper presented at the 2015 Asia-Pacific Signal and
Information Processing Association Annual Summit
and Conference (APSIPA).
Pires, I., Garcia, N., Pombo, N., and Flórez-Revuelta, F.
(2016). From Data Acquisition to Data Fusion: A
Comprehensive Review and a Roadmap for the
Identification of Activities of Daily Living Using
Mobile Devices. Sensors, 16(2), 184.
Pires, I. M., Garcia, N. M., and Flórez-Revuelta, F. (2015).
Multi-sensor data fusion techniques for the
identification of activities of daily living using mobile
devices. Paper presented at the Proceedings of the
ECMLPKDD 2015 Doctoral Consortium, European
Conference on Machine Learning and Principles and
Practice of Knowledge Discovery in Databases, Porto,
Portugal.
Pires, I. M., Garcia, N. M., Pombo, N., and Flórez-
Revuelta, F. (2016-a). Identification of Activities of
Daily Living Using Sensors Available in off-the-shelf
Mobile Devices: Research and Hypothesis. Paper
presented at the Ambient Intelligence-Software and
Applications–7th International Symposium on Ambient
Intelligence (ISAmI 2016).
Pires, I. M., Garcia, N. M., Pombo, N., and Flórez-
Revuelta, F. (2017 (In Review)-a). A Multiple Source
Framework for the Identification of Activities of Daily
Living Based on Mobile Device Data.
arXiv:1711.00104.
Pires, I. M., Garcia, N. M., Pombo, N., and Flórez-
Revuelta, F. (2017 (In Review)-b). User Environment
Detection with Acoustic Sensors Embedded on Mobile
Devices for the Recognition of Activities of Daily
Living. arXiv:1711.00124.
Pires, I. M., Garcia, N. M., Pombo, N., Flórez-Revuelta, F.,
and Rodríguez, N. D. (2016-b). Validation Techniques
for Sensor Data in Mobile Health Applications. Journal
of Sensors, 2016.
Pires, I. M., Garcia, N. M., Pombo, N., Flórez-Revuelta, F.,
and Spinsante, S. (2017 (In Review)-c). Data Fusion on
Motion and Magnetic Sensors embedded on Mobile
Devices for the Identification of Activities of Daily
Living. engrxiv.org/x4r5z.
Pires, I. M., Garcia, N. M., Pombo, N., Flórez-Revuelta, F.,
and Spinsante, S. (2017 (In Review)-d). Pattern
Recognition Techniques for the Identification of
Activities of Daily Living using Mobile Device
Accelerometer. arXiv:1711.00096.
Rader, C., and Brenner, N. (1976). A new principle for fast
Fourier transformation. IEEE Transactions on
Acoustics, Speech, and Signal Processing, 24(3), 264-
266. doi:10.1109/tassp.1976.1162805.
Rahman, S. A., Huang, Y., Claassen, J., Heintzman, N., and
Kleinberg, S. (2015). Combining Fourier and lagged k-
nearest neighbor imputation for biomedical time series
data. J Biomed Inform, 58, 198-207.
doi:10.1016/j.jbi.2015.10.004.
Research, H. (2017). Encog Machine Learning Framework.
Retrieved from http://www.heatonresearch.com/encog/
Scalvini, S., Baratti, D., Assoni, G., Zanardini, M., Comini,
L., and Bernocchi, P. (2013). Information and
communication technology in chronic diseases: a
patient’s opportunity. Journal of Medicine and the
Person, 12(3), 91-95. doi:10.1007/s12682-013-0154-1.
Sert, M., Baykal, B., and Yazici, A. (2006, 0-0 0). A Robust
and Time-Efficient Fingerprinting Model for Musical
Audio. Paper presented at the 2006 IEEE International
Symposium on Consumer Electronics.
Shoaib, M., Scholten, H., and Havinga, P. J. M. (2013).
Towards Physical Activity Recognition Using
Smartphone Sensors. 2013 IEEE 10th International
Conference on and 10th International Conference on
Autonomic and Trusted Computing (Uic/Atc)
Ubiquitous Intelligence and Computing, 80-87.
doi:10.1109/Uic-Atc.2013.43.
Vateekul, P., and Sarinnapakorn, K. (2009). Tree-Based
Approach to Missing Data Imputation. Paper presented
at the Data Mining Workshops, 2009. ICDMW '09.
IEEE International Conference on Miami, FL.
Zou, X., Gonzales, M., and Saeedi, S. (2016). A Context-
aware Recommendation System using smartphone
sensors. Paper presented at the 2016 IEEE 7th Annual
Information Technology, Electronics and Mobile
Communication Conference (IEMCON).
DATA 2018 - 7th International Conference on Data Science, Technology and Applications
170
