
A Fault-Tolerant Sensor Reconciliation Scheme
based on Self-Tuning LPV Observers
Hamid Behzad
1
, Alessandro Casavola
2
, Francesco Tedesco
2
,
Mohammad Ali Sadrnia
1
and Gianfranco Gagliardi
2
1
Shahrood University of Technology, Iran
2
University of Calabria, DIMES, Italy
Keywords:
Sensor Reconciliation, Fault Estimation, LPV Luenberger Observer.
Abstract:
This paper presents a fault-tolerant sensor reconciliation scheme for systems equipped with a redundant num-
ber of possibly faulty ”physical” sensors. The reconciliator is in charge to discover on-line, at each time
instant, the faulty physical sensors, if any, and exclude their measures from the generation of the ”virtual”
sensors, which, on the contrary, are supposed to be always healthy and suitably usable for control purposes
without requiring the reconfiguration of the nominal control law. Amongst many, the solution proposed here
is based on the use of a Linear Parameter Varying Luenberger Observers (LPV-LU) able to estimate both
state, bias fault and loss of effectiveness fault. Such information is used to self adapting the parameters of the
LPV representation. For simplicity, the sensor faults here considered are limited to variation of sensors’ gain
and offset values. The scheme is fully described and all of its properties investigated and proved. Finally, a
simulation example is reported in details to show the effectiveness of the scheme.
1 INTRODUCTION
The capability of control systems to detect faulty sen-
sors and recover in turn uncorrupted data has progres-
sively gained more relevance in the last two decades.
Traditional control schemes are usually designed by
assuming perfect working conditions of the sensors
to be used. However, in practice, sensors are subject
to faults and, in that case, may provide wrong infor-
mation about the system state, possibly degrading the
system performance or even causing instability (Mer-
rill et al., 1988; Samara et al., 2008). Therefore,
Fault-Tolerant Control (FTC) is an important area of
research in the safety critical systems domain.
One strategy to cope with this situation is to find
a controller that assigns to the reconfigured closed-
loop system a similar behaviour with respect to the
nominal closed-loop system. A different strategy re-
lies on the fault hiding approach that tries to hide the
fault to the controller. In the latter approach the nom-
inal controller remains in the loop while the reconfig-
uration block re-routes the output signals around the
faulty component (Lunze and Richter, 2008). Such
an approach has been dealt with in (Steffen, 2005)
where a virtual sensor strategy has been proposed for
fault accommodation purposes. The disadvantage of
that method is that it is assumed that the sensor faults
have already been detected and estimated correctly.
The virtual sensors contribution to Active Fault Toler-
ant Control (AFTC) has been investigated in (Ponsart
et al., 2010). There, the case of multiplicative sen-
sor faults has not received any consideration. The vir-
tual sensor approach has been investigated in (Behzad
et al., 2016), for Sensor Reconciliation(SR) purposes.
This paper aims at presenting a general SR method
for discrete-time linear systems with redundant phys-
ical sensors possibly subject to loss of effectiveness
(gain) and offset (bias) faults. To this end, the pro-
posed scheme consists of two interconnected mod-
ules: (i) a polytopic Luenberger Observer (LU) ((Bara
et al., 2001)) in charge of estimating the current gain
sensor faults, the state of the system and possible bias
fault occurrences; (ii) a sensor reconciliation unit used
to reconcile sensor measures. The key idea used in
the proposed scheme is to consider the current gain
and bias sensor faults with the system states, as an
auxiliary state and consequently to design a polytopic
LPV-UIO observer capable to estimate the faults via
a specific Linear Matrix Inequality (LMI) procedure.
Differently from (Behzad et al., 2016), where the con-
Behzad, H., Casavola, A., Tedesco, F., Sadrnia, M. and Gagliardi, G.
A Fault-Tolerant Sensor Reconciliation Scheme based on Self-Tuning LPV Observers.
DOI: 10.5220/0006840501110118
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 1, pages 111-118
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
111

vergence of the scheme was based on a persistence of
excitation assumption, here we propose a Luenberger
observer to jointly estimate the system state and fault
parameters in a single step in order to guarantee the
convergence of the whole scheme. Moreover, unlike
the approach of (Steffen, 2005), our setup is capable
of fault estimation along with fault accommodation.
The key difference of our approach with respect to
(Ponsart et al., 2010) is that both the multiplicative
and additive faults may be taken into consideration.
Properties of the proposed LPV-LU scheme are for-
mally proved and discussed. A final numerical exam-
ple is reported to show the effectiveness of the pro-
posed strategy.
NOTATION
Let R denote the set of real numbers. A generic ball
in an Euclidean n-space R
n
is defined as B
δ
:= {x ∈
R
n
: |x|
2
≤ δ}. Finally, let kx(·)k denote the `
2
-norm
of a discrete-time signal {x(t)}
∞
−∞
(i.e. kx(·)k =
q
∑
∞
t=−∞
|x(t)|
2
2
).
Definition 1.1. (Cartesian Product) - For P ∈ R
p
and
Q ∈ R
q
being two polytopes of dimension p and q
respectively, their Cartesian Product is defined as
P × Q = {(x,y) : x ∈ P ,y ∈ Q }
Definition 1.2. (Unit Simplex) - The Polytope S
k
:=
{ξ ∈ R
l
|ξ
i
≥ 0, i = 1,...,l,
∑
l
i=1
ξ
i
= 1} is a k-
dimensional Unit Simplex.
Definition 1.3. (Convex hull) - For l matrices
M
i
∈ R
n×m
, i = 1, ..., l, their Convex Hull, de-
noted by Co{M
i
},i = 1, ..., l, is the polytope aris-
ing by all convex combinations of matrices M
i
i.e
{
∑
l
i=1
ρ
i
M
i
,[ρ
1
,...,ρ
l
]
T
∈ S
l
} with S
l
being a l-
dimensional unit simplex.
Definition 1.4. (Pontryagin Set Difference) - For
given sets A, E ⊂ R
n
, the set determined as A ∼ E :=
{a : a + e ∈ A,∀e ∈ E} is the Pontryagin Set Differ-
ence of A with respect to E.
2 PROBLEM FORMULATION
Let us consider a plant whose dynamics is described
by the following discrete-time state-space representa-
tion
x
p
(t + 1) = Ax
p
(t) + Bu(t) + Ev(t) (1)
y(t) = ∆
γ(t)
C
y
x
p
(t) + Fb(t) (2)
z(t) = H
z
C
y
x
p
(t) (3)
where A ∈ R
n×n
, B ∈ R
n×n
u
, E ∈ R
n×n
v
, C
y
∈ R
m×n
and
F ∈ R
m×q
are constant matrices. Moreover, x
p
(t) ∈
R
n
is the state vector assumed to be confined in the
following set
X
p
:= {x
p
: x
p
≤ x
p
≤ x
p
} (4)
Notice that the upper and lower bounds are re-
quired to describe the polytopic representation of the
output. This representation will be used to design a
LPV observer.
Moreover u(t) ∈ R
n
u
is a known input while v(t) ∈
R
n
v
is an unknown input. y(t) ∈ R
m
represents the
plant output provided by physical redundant sensors
possibly effected by both bias b(t) ∈ R
q
and loss of ef-
fectiveness faults, the latter being modeled by the gain
matrix ∆(γ) ∈ R
m×m
that, for simplicity, we assume
hereafter to have the following elementary structure:
∆(γ(t)) =
γ
1
(t) 0 0
0
.
.
.
0
0 0 γ
m
(t)
(5)
Finally, z(t) ∈ R
r
, with r ≤ m, is defined as the
virtual output of the system and represents the healthy
information we need to get from the plant for control
purposes regardless of any fault possibly occurring on
the physical sensors.
It is clear that in the absence of faults one would
have ∆(γ) = I
m
and b(t) = 0
q
. However, in the more
general case b(t) 6= 0
q
and ∆(γ) 6= I
m
, with γ confined
in the generic polytope
Γ ⊆ {γ : 0
m
≤ γ ≤ 1
m
} (6)
For this reason, it is not convenient to evaluate
the signal z(t) as z(t) = H
z
y(t) because it would be
affected by possibly corrupted information brought
by y(t). However, because the state x
p
(t) is assumed
not directly measurable, z(t) cannot be evaluated as
simply as in (3), but a more sophisticated machinery
is required. This aspect motivates the design of the
Sensor Reconciliator unit before mentioned which
basically aims at addressing the following problem:
Sensor Reconciliaton Design Problem (SRDP-
Problem):
Given the system (1)-(3), compute, at each time
t ≥ 0 on the basis of the real output y(t) mea-
sures, a suitable estimate ˆz(t) of the virtual output
z(t) := H
z
C
y
x
p
(t), despite of the presence of both
fault occurrences, corrupting the vectory(t), and
disturbances v(t).
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
112
Faulty
sensors
t
n
a
l
P
s
1
s
2
s
m
UIO unit
Reconciliator
Unit
Virtual Sensor
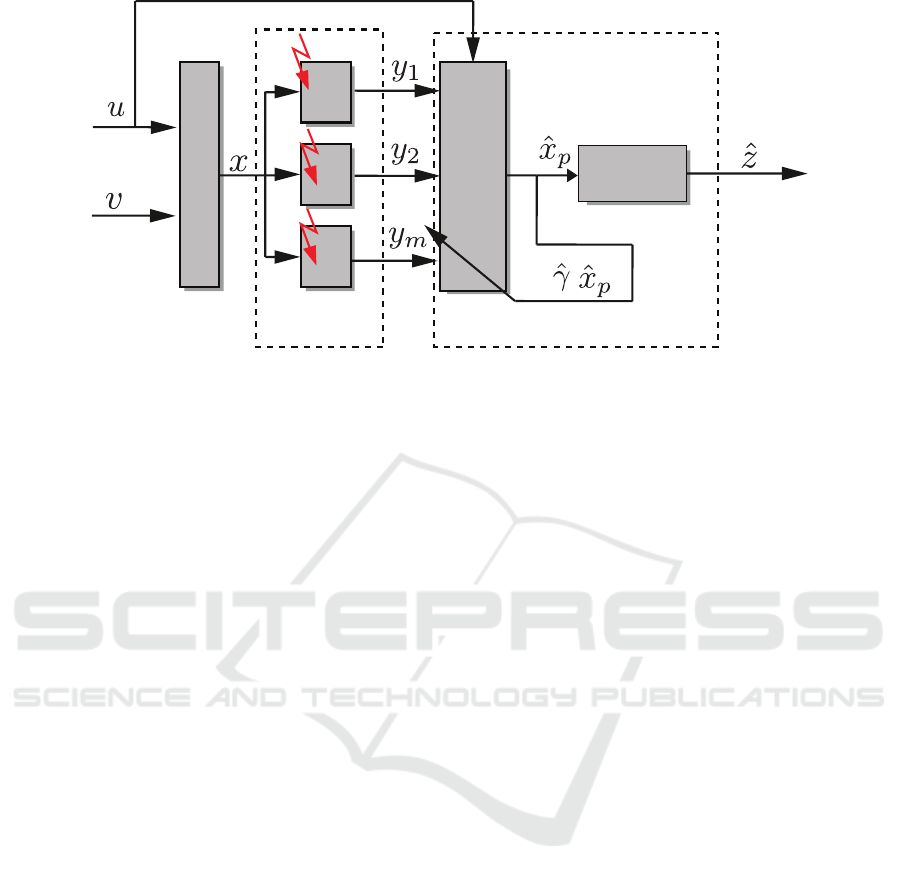
Figure 1: Virtual Sensor Architecture.
3 VIRTUAL SENSOR
ARCHITECTURE
The SRDP-Problem solution here proposed is based
on the evaluation of an estimate ˆx
p
(t) of the state x
p
(t)
that is exploited to compute the corresponding ap-
proximation ˆz(t) of z(t) through the following equa-
tion
ˆz(t) = H
z
C
y
ˆx
p
(t) (7)
Such an approach requires to face two crucial is-
sues: 1) How to estimate the fault occurrences cor-
rupting y(t)? 2) How to get a good estimation ˆx
p
(t)
in the presence of an unknown input v(t) and time-
varying sensor gains and bias?
The above mentioned questions are dealt with by
introducing the virtual sensor architecture depicted in
Fig. 1 that consists of two modules: a Luenberger
Observer (LO) unit which is the core of this scheme
and is designed to jointly compute current estimates
of the state x
p
(t) , the bias term b(t) and the effective-
ness matrix (5) parameters; a Reconciliator Unit that
simply performs the computation indicated in (7).
4 SENSOR FAULT AUGMENTED
MODEL
In order to design the Luenberger observer, the fol-
lowing augmented state is considered that includes
the bias fault b(t) and multiplicative fault γ(t) vector
among its components
x(t) =
x
p
(t)
b(t)
γ
1
(t)
.
.
.
γ
m
(t)
(8)
Notice that in order to describe the augmented
model, one has to assume that the multiplicative sen-
sor fault term γ(t), the bias term b(t) and the parame-
ters ∆γ(t) and ∆b(t) are bounded in the l
2
norm sense,
where
∆b(t) := b(t + 1) − b(t)
∆γ(t) := γ(t + 1) − γ(t)
In this way, the related augmented model can be de-
scribed as
x(t + 1) =
¯
Ax(t) +
¯
Bu(t) +
¯
Ev(t)
+
¯
F∆b(t) +
¯
D∆γ(t)
¯y(t) =
¯
C
γ(t),x
p
(t)
x(t) (9)
where
¯
A =
A 0 0
0 I 0
0 0 I
,
¯
B =
B
0
0
,
¯
E =
E
0
0
,
¯
F =
0
I
0
¯
C
{γ(t),x
p
(t)}
=
4(γ(t))C
y
F 0
0 F diag(C
y
x
p
(t))
,
¯
D =
0
0
I
(10)
5 LUENBERGER OBSERVER
In this section we describe the basic ingredients of the
proposed observer. Let us assume to be provided with
A Fault-Tolerant Sensor Reconciliation Scheme based on Self-Tuning LPV Observers
113

estimates
ˆ
γ(t) of γ(t) and ˆx
p
(t) of x
p
(t) at each time
t. Then, a possible structure for an observer for the
model (9) is given by
ˆx(t + 1) =
¯
A ˆx(t) +
¯
Bu(t) +L
¯y(t) − ˆy(t)
ˆy(t) =
¯
C
{
ˆ
γ(t), ˆx
p
(t)}
ˆx(t) (11)
As a consequence, the one-step ahead evolution of
the state estimation error
e(t) := x(t) − ˆx(t) (12)
would take the following form
e(t + 1) =
¯
A − L
ˆ
γ(t), ˆx
p
(t)
¯
C
{
ˆ
γ(t), ˆx
p
(t)}
e(t) +
¯
Ev(t)
+
¯
F∆b(t) +
¯
D∆γ(t) − L
ˆ
γ(t), ˆx
p
(t)
d(t) (13)
with
d(t) :=
¯
C
{γ(t),x
p
(t))}
−
¯
C
{
ˆ
γ(t), ˆx
p
(t)}
x(t)
If
¯
A − L
{
ˆ
γ(t), ˆx
p
(t)}
¯
C
{
ˆ
γ(t), ˆx
p
(t)}
were chosen as a sta-
ble matrix ∀γ ∈ Γ and ∀x
p
∈ X
p
, the state estimation
error would remain bounded whenever ∆b(t) and
∆γ(t) remain bounded as well. Hence, the state x(t)
of the system can be estimated.
Moving from these considerations, in order to de-
sign the Luenberger observer (11), it is is sufficient
to determine a parameter varying gain L
γ,x
p
that ro-
bustly stabilizes the system (13) against all possible
occurrences of ∆b(t), ∆γ(t) and d(t). Such a problem
has been addressed in a significant amount of works
in different contexts by exploiting well-known results
on robust control theory and LMI formalism. Specif-
ically, among many observer design approaches, it is
interesting to mention here (Heemels et al., 2010),
where the LPV gain is determined in the case of con-
stant output matrix. A similar approach has been con-
sidered in (Zhou et al., 2013), where a LMI based pro-
cedure has been proposed to compute a constant gain.
Here we design a discrete-time self-tuning LPV
observer where the time-varying parameter γ and the
state x
p
are not perfectly known. In particular, the
approach considers systems (13) characterized by a
structured uncertainty related to γ , x
p
and attempts to
determine a LPV gain that can be tuned on-line by ex-
ploiting an estimate
ˆ
γ(t) and ˆx(t) of the true γ(t) and
x(t). In this respect, it is worth pointing out that we
assume hereafter to be provided by a polytopic em-
bedding approximation for matrix
¯
C
{
ˆ
γ(t), ˆx
p
(t)}
given
by
¯
C
ρ
=
l
∑
i=1
ρ
i
(γ,x
p
)
˜
C
i
, (14)
for a certain continuous functions ρ
i
: Γ ×X
p
∼ B
δ
→
R of γ and x
p
and matrices
˜
C
i
, i = 1, ..., l.
Now, we have all the ingredients to design a LPV
gain L
ˆ
ρ
defined as follows
L
ˆ
ρ
=
l
∑
i=1
ˆ
ρ
i
(γ,x)L
i
(15)
where the gains L
i
, i = 1, ..., l are properly chosen to
stabilize the observer with the estimation error subject
to
e(t + 1) = N
ˆ
ρ(t)
e(t) + F
ˆ
ρ(t)
w(t) (16)
with
N
ρ
:=
¯
A − L
ρ
¯
C
ρ
F
ρ
:=
¯
E
¯
F T
ρ
¯
D −L
ρ
, w(t) :=
v(t)
∆b(t)
∆γ(t)
d(t)
(17)
In addition, those gains have to guarantee that for each
estimate
ˆ
γ, ˆx
p
,
˜
C
ρ
lies in the convex hull Co{
˜
C
i
},i =
1,...,l. Moreover it is assumed that the signal w(t)
belong to `
2
space with a known bound ¯w on its `
2
-
norm, i.e.
kw(·)k ≤ ¯w (18)
Then the problem just stated translates into finding a
parameter-dependent gain such that difference equa-
tion (16) is stable for any arbitrary time variation of
the parameters
ˆ
ρ(t) ∈ S
l
and such that, for any input
w(t) satisfying (18), the error e(t) is bounded as
||e(·)|| < σ||w(·)||, (19)
A convex optimization methodology to solve the
above stated design problem is provided in the next
Theorem 1.
Theorem 1. Assume a symmetric strictly positive def-
inite matrices P
i
and matrices G
i
and Y
i
, i = 1,...,l
exist such that the optimization problem
min
P
i
,G
i
,Y
i
,µ
µ
subject to
Ξ
i j
:=
G
i
+ G
T
i
− P
j
Q
12
G
i
F
i
? P
i
− I 0
? ? µI
> 0, µ <
δ
2
¯w
2
i = 1, ..., l, j = 1, ...,l
Q
12
:= G
i
˜
T
i
˜
A −Y
i
˜
C
i
(20)
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
114

Ξ
i jk
:=
R
11
R
12
R
13
∗ P
i
+ P
k
− I 0
∗ ∗ µI
> 0
i = 1, ..., l − 1, j = 1, ..., l, k = i + 1,...,l
R
11
:= G
i
+ G
T
i
+ G
k
+ G
T
k
+ P
j
R
12
:= G
i
˜
T
k
¯
A + G
k
˜
T
i
¯
A −Y
i
˜
C
k
−Y
k
˜
C
i
R
13
:= G
i
F
k
+ G
k
F
i
(21)
has a solution. Then, the convergence of the observer
estimation error dynamically characterized by equa-
tion (16) is ensured, the guaranteed H
∞
performance
gain (19) given by
σ =
p
µ
?
<
δ
¯w
, µ
?
= minµ (22)
is achieved and
ˆ
ρ(t) is ensured to vary into S
l
. More-
over, the observer gain vertices defined in (15) are
given by
L
i
= G
−1
i
Y
i
,i = 1,...,l (23)
and stabilize the observer for any arbitrary time vari-
ation of the parameter
ˆ
ρ(t) in the polytope S
l
.
Proof : Consider the parameter-dependent Lya-
punov function
V
e(t)
= e
T
(t)P
ˆ
ρ(t)
e(t) (24)
with
P
ˆ
ρ(t)
=
l
∑
i=1
ˆ
ρ
i
(t)P
i
,P
i
= P
T
i
, i = 1, ..., l (25)
The related one-step ahead evolution of the Lyapunov
function on the observer error trajectory is given by
V
e(t + 1)
= e
T
(t + 1)P
ˆ
ρ(t+1)
e(t + 1) (26)
where P
ˆ
ρ(t+1)
can be written as
P
ρ(t)
=
l
∑
j=1
ρ
j
(t)P
j
,P
j
= P
T
j
, j = 1,...,l (27)
Using (27), one can recast (26) into
V
e(t + 1)
=
N
ˆ
ρ(t)
e(t) + F
ˆ
ρ(t)
w(t)
T
P
ρ(t)
N
ˆ
ρ(t)
e(t) + F
ˆ
ρ(t)
w(t)
(28)
Then, the Lyapunov function increment derived
by (24) and (28) results to be given by
∆V (e(t)) = V (e(t + 1)) −V (e(t))
= e
T
(t)
N
T
ˆ
ρ(t)
P
ρ(t)
N
ˆ
ρ(t)
− P
ˆ
ρ(t)
e(t)
+ 2e
T
(t)N
T
ˆ
ρ(t)
P
ρ(t)
F
ˆ
ρ(t)
w(t)
+ w
T
(t)F
T
ˆ
ρ(t)
P
ρ(t)
F
ˆ
ρ(t)
w(t) (29)
It is well-known that the stability of system with H
∞
guaranteed performance (19) is ensured if
∆V (e(t)) < −e
T
(t)e(t) + µw
T
(t)w(t), ∀t (30)
By replacing ∆V (e(t)) with the expression (29), one
is able to rewrite (30) as Γ
T
(t)UΓ(t) < 0 with Γ(t) :=
e
T
(t) w
T
(t)
T
and
U :=
U
11
U
12
? U
22
(31)
U
11
:= N
T
ˆ
ρ(t)
P
ρ(t)
N
ˆ
ρ(t)
− P(ρ(t)) + I
U
12
:= N
T
ˆ
ρ(t)
P
ρ(t)
F
ˆ
ρ(t)
, U
22
:= F
T
ˆ
ρ(t)
P
ρ(t)
F
ˆ
ρ(t)
− µI
Clearly, by imposing U < 0 it is possible to guarantee
(30) for all e(t) 6= 0 and w(t) 6= 0 by satisfying the
following inequality
"
N
T
ˆ
ρ(t)
P
ρ(t)
F
T
ˆ
ρ(t)
(ρ(t))P
ρ(t)
#
P
−1
ρ(t)
P
ρ(t)
N
ˆ
ρ(t)
P
ρ(t)
F
ˆ
ρ(t)
−
P
ˆ
ρ(t)
− I 0
0 µI
< 0
(32)
The latter, thanks to the use of a Schur’s comple-
ment argument, is equivalent to
U
0
:=
P
ρ(t)
P
ρ(t)
N
ˆ
ρ(t)
P
ρ(t)
F
ˆ
ρ(t)
? P
ˆ
ρ(t)
− I 0
? ? µI
> 0 (33)
that can be recast into
MU
0
M
T
> 0 with M :=
G
ˆ
ρ(t)
P
−1
ρ(t)
0 0
0 I 0
0 0 I
(34)
and, in turn, into
G
ˆ
ρ(t)
P
−1
ρ(t)
G
T
ˆ
ρ(t)
G
ˆ
ρ(t)
N
ˆ
ρ(t)
G
ˆ
ρ(t)
F
ˆ
ρ(t)
? P
ˆ
ρ(t)
− I 0
? ? µI
> 0 (35)
Using previously defined matrices and considering
that ρ ∈ S
l
and
ˆ
ρ ∈ S
l
, inequality (35) can be written
as
l
∑
i=1
ˆ
ρ
2
i
(t)
l
∑
j=1
ρ
j
(t)Ξ
i j
+
l−1
∑
i=1
l
∑
k=i+1
ˆ
ρ
i
(t)
ˆ
ρ
k
(t)
l
∑
j=1
ρ
j
(t)Ξ
i jk
> 0
(36)
with Ξ
i j
defined in (20) and Ξ
i jk
defined in (21). For
more details please refer to (Heemels et al., 2010).
A Fault-Tolerant Sensor Reconciliation Scheme based on Self-Tuning LPV Observers
115
0 1000 2000 3000 4000 5000 6000 7000
u
-150
-100
-50
0
50
100
150
Known Input
Time(Steps)
0 1000 2000 3000 4000 5000 6000 7000
v
0
20
40
60
80
100
Unknown Input
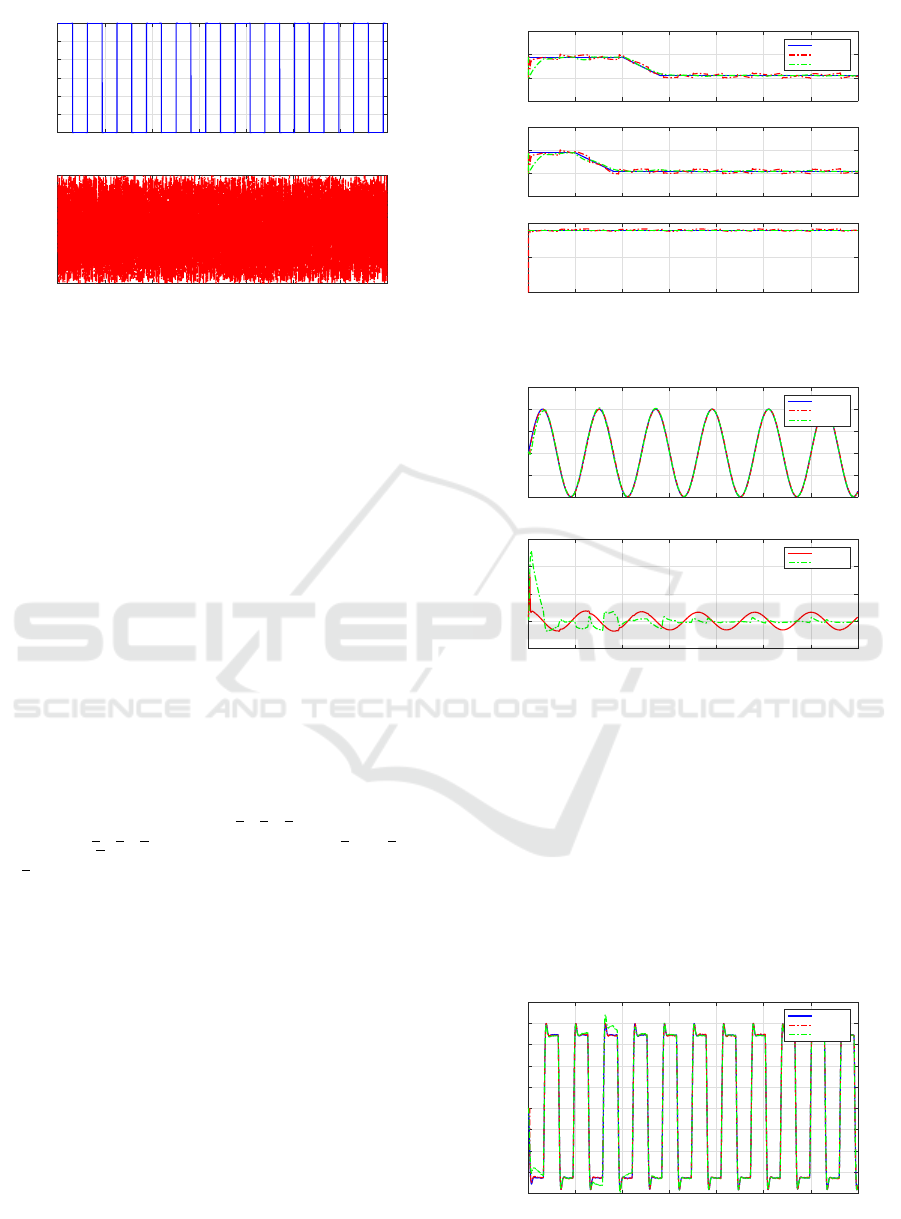
Figure 2: Known Input (up) and Unknown Input (down).
6 ILLUSTRATIVE EXAMPLE
In this section, the effectiveness of the proposed UIO-
SR scheme is investigated by considering the follow-
ing linear stable model
x
p
(t + 1) = Ax
p
(t) + Bu(t) + Ev(t)
y(t) = ∆(γ(t))C
y
x
p
(t) + Fb(t) (37)
where
A =
0.98806 0.0096049
−0.32754 0.93033
,B =
−0.0001
−0.0921
,
C
y
=
"
1 0
1 0
1 1
#
,E = 0.01 ×
1
1
F =
"
1
1
1
#
with γ assumed to be confined within the polytope
Γ :=
n
γ : [γ
1
,γ
2
,γ
3
]
T
≤ γ ≤ [γ
1
,γ
2
,γ
3
]
T
o
,γ
1
= γ
2
=
0, γ
3
= 0.1, γ
i
= 1, i = 1,2,3.
The goal of this simulation is to verify the capa-
bility of the proposed method to correctly estimate
the first component of x
p
(t) in (37) under faults that is
used as virtual output z(t) = H
z
C
y
x
p
(t) for the system.
Correspondingly, the following sensor reconciliation
matrix
H
z
=
0.5 0.5 0
(38)
results with the known input u(t) depicted in Figure
2 (up) and the unknown input v(t) supposed to be a
white noise with standard deviations equal to 10 (de-
picted in Figure 2 (down)). Moreover, the bias profile
on the three available physical sensors is assumed to
change along the simulation time according to the
0 1000 2000 3000 4000 5000 6000 7000
γ
1
-1
0
1
2
Gain Fault Estimation(∆
γ
)
Real
LPV-UIO
LPV-LU
0 1000 2000 3000 4000 5000 6000 7000
γ
2
-1
0
1
2
Time(Steps)
0 1000 2000 3000 4000 5000 6000 7000
γ
3
0
0.5
1
Figure 3: Loss of effectiveness parameters.
0 1000 2000 3000 4000 5000 6000 7000
f(t)
-100
-50
0
50
100
150
Bias Fault Estimation
Real
LPV-UIO
LPV-LU
Time(Steps)
0 1000 2000 3000 4000 5000 6000 7000
e
f(t)
-10
0
10
20
30
Bias Fault Estimation Error
LPV-UIO
LPV-LU
Figure 4: Bias fault and its estimation.
following profile
b(t) = 1 + 100sind(0.3t) (39)
and faults on the matrix effectiveness gain will affect
the first two sensors as depicted in Figure 3.
In this scenario, without any sensor reconciliator
block the virtual output would result falsified, as de-
picted in Figure 5 (blue dashed line), because of faults
occurrences on the physical sensors.
Time(Steps)
0 1000 2000 3000 4000 5000 6000 7000
z(t)
-40
-30
-20
-10
0
10
20
30
40
50
Virtual Output
Real
LPV-UIO
LPV-LU
Figure 5: Virtual Output and its estimation.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
116
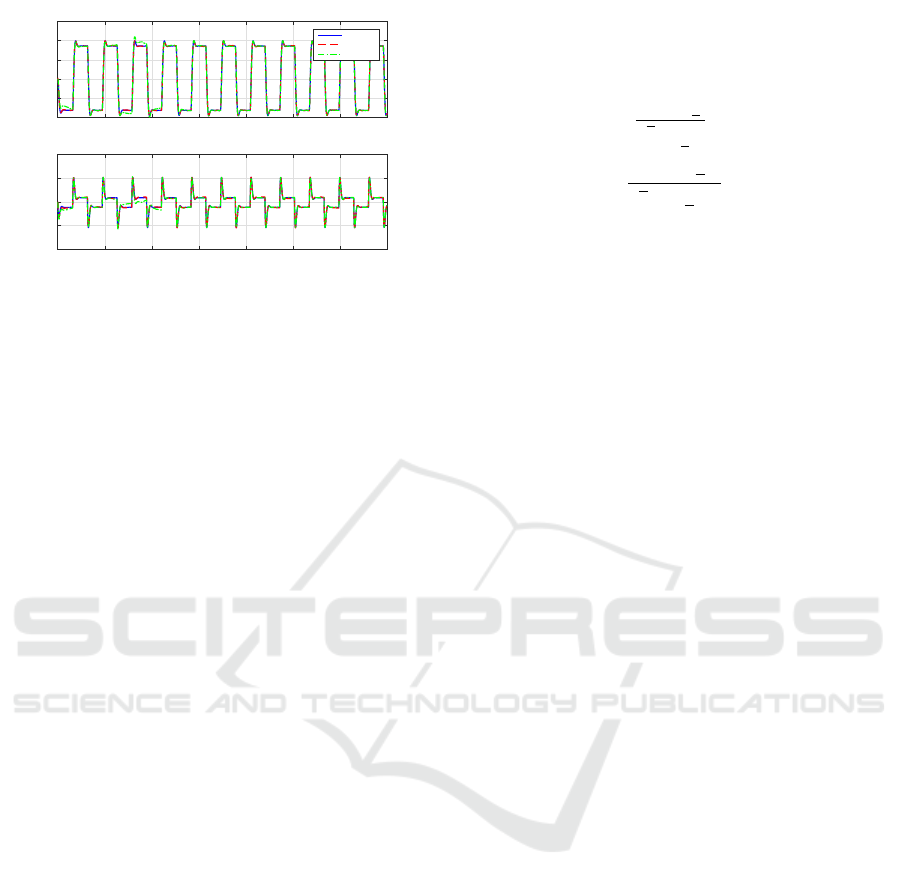
0 1000 2000 3000 4000 5000 6000 7000
x
1
-40
-20
0
20
40
60
State Estimation
Real
LPV-UIO
LPV-LU
Time(Steps)
0 1000 2000 3000 4000 5000 6000 7000
x
2
-400
-200
0
200
400
Figure 6: Loss of effectiveness parameters.
By defining the auxiliary state
x(t) :=
x
p
(t) b(t) γ
1
(t) γ
2
(t) γ
3
(t)
T
the augmented model (9) is derived where
¯
A =
A 0 0
0 1 0
0 0 I
3×3
,
¯
B =
B
0
1×1
0
3×1
,
¯
E =
E
0
1×1
0
3×1
,
¯
F =
0
2×1
1
0
3×1
¯
C
{γ(t),x
p
(t)}
= (40)
γ
1
(t) 0 1 0 0 0
γ
2
(t) 0 1 0 0 0
γ
3
(t) γ
3
(t) 1 0 0 0
0 0 1 x
p
1
(t) 0 0
0 0 1 0 x
p
2
(t) 0
0 0 1 0 0 x
p
1
(t) + x
p
2
(t)
¯
D =
0
2×3
0
1×3
I
3×3
(41)
In order to exploit a polytopic Luenberger observer
for (9), an embedding polytopic representation of the
form (14) has been derived. To this end, the matrix
¯
C
γ,x
can be embedded in P
C
:= Co{C
1
,...,C
32
} with
related vertices computed by evaluating matrix
¯
C
γ,x
on the extremum points of Γ and x
p
. Then, a suit-
able polytopic representation (14) can be achieved by
first deriving the LPV scheduling parameter ρ(p), that
in this example is composed by 32 components, each
one having the following structure
ρ
1
:=
∏
i, j
(1 − p
1
i
)(1 − p
2
j
)
.
.
.
ρ
32
:=
∏
i, j
p
1
i
p
2
j
(42)
where the measurable parameters p
1
i
and p
2
j
obtained
by normalizing and centering the physical signals γ(t)
and x
p
(t)
p
1
i
(t) =
γ
i
(t) − γ
i
γ
i
− γ
i
, i = 1,.., 3
p
2
j
(t) =
x
p
j
(t) − x
p
j
x
p
j
− x
p
j
, j = 1,2 (43)
Finally, it is possible to get a polytopic embedding
approximation for
¯
C
γ,x
as follows
¯
C
ρ
=
l
∑
i=1
ρ
i
(p)C
i
(44)
A simulative comparison has been attempted between
the presented LPV-LU-SR scheme and the Sensor
Reconciliating approach of (Behzad et al., 2016), here
referred to as LPV-UIO-SR and endowed with a LPV
polytopic observer. In order to compute the observer’s
gain, the same embedding polytopic representation
used in (Behzad et al., 2016) has been here considered
for the matrix
¯
C
ρ
, that consists in a polytope charac-
terized by 64 vertices.
In Figures 3-6 these schemes have been com-
pared. Although both observers achieve good perfor-
mance in getting an estimate of x
(1)
p
, as expected, the
LPV-LU-SR scheme exhibits a slight better behav-
ior with respect to LPV-UIO-SR, both in estimating
the state and the bias. This is mostly due to the fact
the observer exploits the knowledge on the input v(t)
supposed unknown in the case of the LPV-UIO-SR
scheme. Such an aspect translates in a better effec-
tiveness parameter (gain matrix) estimation (Figure 4)
and in a more accurate virtual output generation (Fig-
ure 6).
However, beyond the numerical results, it is worth
discussing some practical aspects of the considered
strategies. Unlikely the LPV-UIO-SR, the LPV-LU-
SR does not require any persistent excitation of the
state estimate that is needed to ensure parameter es-
timation convergence. Unfortunately, such an expe-
dient is not enough in general to guarantee conver-
gence on the state estimation. On the other hand, the
LPV-UIO-SR presents two advantages with respect
to LPV-LU-SR: it does not require neither the input
knowledge nor any pre-specified bounds on the state
x
p
.
7 CONCLUSIONS
In this paper, LPV Luenberger observers have been
proposed to solve fault-tolerant sensor reconciliation
A Fault-Tolerant Sensor Reconciliation Scheme based on Self-Tuning LPV Observers
117

design problems for linear discrete-time systems sub-
ject to possible faults on sensor gain and bias. The
role of the observer relies on the estimation of both
the state of the system and the current fault of the
physical sensors. The resulting design procedure is
quite simple and guarantees bounded errors on the es-
timation of both the plant state and fault parameters.
The scheme has been fully described, its properties
rigorously proved and, in the final simulation exam-
ple, it has been shown to achieve good performance
in recovering useful data from the pool of redundant
sensors.
REFERENCES
Bara, G. I., Daafouz, J., Kratz, F., and Ragot, J. (2001).
“Parameter-dependent state observer design for affine
LPV systems”. International Journal of Control,
74(16):1601–1611.
Behzad, H., Casavola, A., Tedesco, F., and Sadrnia, M. A.
(2016). “A fault-tolerant sensor reconciliation scheme
based on LPV Unknown Input Observers”. In IEEE
55th Conference on Decision and Control (CDC),
2016, Las Vegas, NV. IEEE.
Heemels, W. M. H., Daafouz, J., and Millerioux, G. (2010).
“Observer-based control of discrete-time LPV sys-
tems with uncertain parameters”. IEEE Trans. on Aut.
Contr., 55(9):2130–2135.
Lunze, J. and Richter, J. H. (2008). “Reconfigurable fault-
tolerant control: a tutorial introduction”. European
Journal of Control, 14(5):359–386.
Merrill, W. C., DeLaat, J. C., and Bruton, W. M. (1988).
“Advanced detection, isolation, and accommodation
of sensor failures-real-time evaluation”. Journal of
Guidance, Control, and Dynamics, 11(6):517–526.
Ponsart, J.-C., Theilliol, D., and Aubrun, C. (2010). “Vir-
tual sensors design for active fault tolerant control sys-
tem applied to a winding machine”. Control Engineer-
ing Practice, 18(9):1037–1044.
Samara, P. A., Fouskitakis, G. N., Sakellariou, J. S., and
Fassois, S. D. (2008). “A statistical method for the
detection of sensor abrupt faults in aircraft control sys-
tems”. IEEE Transactions on Control Systems Tech-
nology, 16(4):789–798.
Steffen, T. (2005). “Reconfiguration using a virtual sen-
sor”. In Control Reconfiguration of Dynamical Sys-
tems, pages 69–79. Springer.
Zhou, M., Shen, Y., and Wang, Q. (2013). “Robust UIO-
based fault estimation for sampled-data systems: An
LMI approach”. In IEEE International Conference
on Information and Automation (ICIA), 2013, pages
1308–1313, Yinchuan, China.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
118
