
3D Face Recognition on Point Cloud Data
An Approaching based on Curvature Map Projection using Low Resolution Devices
Luis Felipe de Melo Nunes
2
, Caue Zaghetto
2
and Flavio de Barros Vidal
1
1
Department of Computer Science, University of Brasilia, Brazil
2
Department of Mechanical Engineering, University of Brasilia, Brazil
Keywords:
Point Cloud, Face Recognition, Curvature Maps, Three-dimension Face Data, Low Resolution Device.
Abstract:
Facial recognition is the most natural and common form of biometrics, routinely used by humans and one of
the most promising areas in biometrics research. The majority of traditional researches and commercial use
of facial recognition systems are focused on methods that explores 2D (two-dimensional) images of human
faces. All of them are based on features extraction that does not use any 3D shape information from the
faces, especially with regard to depth. This paper presents a method based on Point Cloud and Curvature
Map Projection to perform a 3D face recognition. The achieved results are presented and divided in two
test scenarios, composed by a biometric evaluation analysis applying the Equal Error Rate score, Receiver
Operating Characteristic and an accuracy comparison with other related works. The proposed work presents
an accuracy of about 98.92%, allowing it to be applied for 3D face recognition tasks.
1 INTRODUCTION
The increasing need to monitor and restrict access
to information or environments has led to major ef-
forts towards the development of a variety of security
mechanisms, such as biometric systems (Jain et al.,
2000). In addition to applications related to access
control, there are also others associated with civil
identification and criminal investigation. To properly
identify a user, biometric systems must rely on traits
that present sufficient levels of universality, distinc-
tiveness, permanence, collectability, acceptability and
circumvention (Jain et al., 2004).
Among the various ways of performing biomet-
rics, it is possible to highlight the facial recognition.
Undoubtedly, facial recognition is the most natural
and common form of biometric routinely used by hu-
mans and one of the most promising areas in biomet-
rics research (Soldera et al., 2017). In general, facial
recognition algorithms uses facial shape and their spa-
tial relationships to perform individuals recognition
(Jain et al., 2000). Although a human being is able to
recognize a human face in an unfamiliar environment
in approximately 100-200 ms, to a computer, running
the best yet existing algorithms, it is still a challenge
to accomplish this kind of task (Haykin and Network,
2004). It is true that in the last decade the reliability
of face recognition algorithms has been improved, but
in unconstrained environments problems such as un-
controlled illumination, head pose, facial expression
and partial occlusion are still a bottleneck to these al-
gorithms to achieve higher efficiency (Soldera et al.,
2017).
The majority of traditional research and commer-
cial use of facial recognition systems are focused on
methods that explores 2D (two-dimensional) images
of human faces (Bowyer et al., 2006). These meth-
ods, in general, are based on features extraction that
does not take into account the 3D shape of faces, es-
pecially with regard to depth.
This paper presents a method based on Point
Cloud and curvature map projection in order to per-
form face recognition. To the best of our knowledge,
although some works have already addressed the chal-
lenge of 3D facial recognition (Patil et al., 2015), the
solution presented in this paper is the only one that
uses Point Cloud data and FCM method, applied to
a dataset of 3D face images acquired by a low cost
sensor device, to perform the task.
The remainder of this paper is divided into five
sections: In Section 2, related works are discussed;
Background concepts and the proposed method are
266
Nunes, L., Zaghetto, C. and Vidal, F.
3D Face Recognition on Point Cloud Data - An Approaching based on Curvature Map Projection using Low Resolution Devices.
DOI: 10.5220/0006843702660273
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 266-273
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

presented and discussed in the Section 3; Experimen-
tal results are shown in Section 4; and, finally, Section
5 presents conclusions and future works.
2 RELATED WORKS
Although there is a considerable number of work re-
lated to facial recognition, few of them present a so-
lution that explores 3D facial characteristics and mor-
phology, in the way that this work does, as will be
explained. Face recognition systems are among the
most reliable biometric systems. They are totally un-
obtrusive and a natural mode of identification among
humans (Jain et al., 2004). In well-behaved environ-
ments, the performance can be compared to finger-
prints (Zaghetto et al., 2017). However, face recogni-
tion is still a challenge, since its accuracy is reduced
due to a number of factors, such as illumination, pose,
distance and many others (Burrows and Cohn, 2009).
Towards improvement of facial recognition sys-
tems, a variety of recent solutions have been pro-
posed. The work of (Haghighat et al., 2016), for
instance, present a fully automatic face recognition
system robust to most common face variations in un-
constrained environments. The system is capable of
recognizing faces from non-frontal views and under
different illumination conditions using only a single
gallery sample for each subject.
Another approach is proposed by (Borgi et al.,
2015), which addresses the problem using a multi-
scale directional framework called Shearlet Network
(SN) to extract facial features, and, a refinement of
the Multi-Task Sparse Learning (MTSL) framework.
One should note that, although previously mentioned
works address the problem of facial recognition, they
do not explore the morphological three-dimensional
(3D) characteristics of faces.
As it is known, 2D images are very sensitive to
illumination changes (Papatheodorou and Rueckert,
2007). Given this fact and the fact that controlling
light in real scenarios are not an easy task, 2D face
recognition biometric systems will never be free from
this weakness. Training algorithms using different il-
lumination scenarios as well as illumination normal-
ization of 2D images has been used, but with limited
success (Papatheodorou and Rueckert, 2007).
In 3D images, however, variations in illumination
do only affect the texture of the image, preserving
its shape and morphological three-dimensional (3D)
characteristics intact (Hesher et al., 2003). To over-
come the problem of illumination on 2D images, the
work of (Chen et al., 2017) proposes that 3D features
may be extracted from 2D images. Based on making
full use of advantages of Sparse Preserving Projec-
tion (SPP) on feature extraction, the discriminant in-
formation was introduced into SPP to arrive at a novel
supervised feather extraction method, that named Un-
correlated Discriminant SPP (UDSPP) algorithm.
Although (Chen et al., 2017) uses 3D features, it
does not work with real 3D images arguing that “al-
though the 3D model method can achieve satisfactory
recognition rate, it needs to pay higher computation
cost”. The work of (Hu et al., 2014) proposed like-
wise a facial recognition method which only uses 3D
images in the face detection process.
Another recent work that addresses the problem
of 3D facial recognition was proposed by (Kim et al.,
2017). In this work, a novel 3D face recognition al-
gorithm using a deep convolutional neural network
(DCNN) and a 3D augmentation technique is pro-
posed. It is mentioned that “training discriminative
deep features for 3D face recognition is very difficult
due to the lack of large-scale 3D face datasets”, so a
CNN is trained on 2D face dataset and then applied to
3D face recognition. Here it should be remarked that
3D facial recognition is still an open field to improve-
ment, either because it demands high computational
power or because it lacks of a large dataset to train al-
gorithms or validate results. The work of (Zhou et al.,
2015) proposes a real time 3D face recognition utiliz-
ing a trained two-level cascade classifier and prepro-
cessing the RGB and depth data.
A recent work of (Goswami et al., 2014) proposes
the unification of 2D and 3D information in order to
accomplish a hybrid face recognition, applying tech-
niques of entropy and saliency to construct a descrip-
tor and utilizing geometrical analysis of 3D fiducial
points. A complete survey of 3D facial recognition is
presented in (Patil et al., 2015).
Table 1 summarizes the comparison between the
related work and the proposed method in this paper.
3 PROPOSED METHOD
In this section, to describe our proposed methodology
all stages are presented in the fluxogram of the Figure
1. The methodology is summarized into four main
steps: 3D Cloud points preprocessing, Face Curva-
ture Maps, Features Extraction and Similarity Match-
ing, all of them described below in Subsections 3.1 up
to 3.4, respectively.
3.1 3D Cloud Points Preprocessing
Firstly, all available 3D data captured contains three-
dimensional information of a full human upper-body.
3D Face Recognition on Point Cloud Data - An Approaching based on Curvature Map Projection using Low Resolution Devices
267
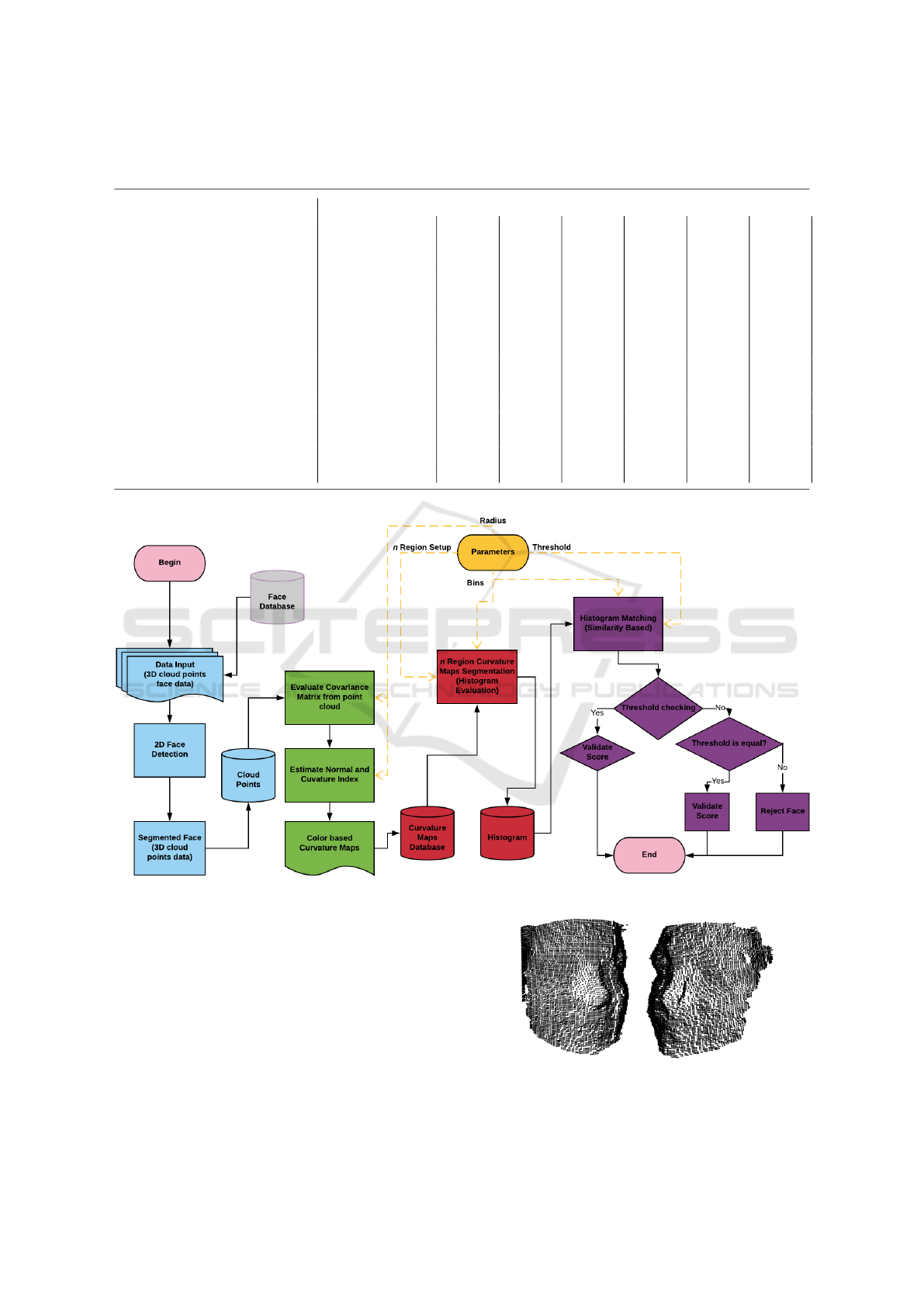
Table 1: Comparison between methods using the characteristics: 3D recognition, real 3D dataset, low Cost sensor, no training,
Low computational power, Point Cloud e Face Curvature Maps (FCM).
Method Characteristics
3D Recog. Real
3D
dataset
Low
cost
sensor
No
train-
ing
Low
comp.
power
Point
Cloud
FCM
Haghighat, Abdel-Mottaleb,
and Alhalabi (2016)
X X
Borgi, Labate, Elarbi, and
Amar (2015)
X X
Hu N. et al. (2014) X X
Chen Zhanwei, Huang Wei,
and Zhihan Lv (2017)
X X
Kim D. et al. (2017) X X
Guswami, Vatsa and Singh
(2014)
X X X
Zhou, Chen and Wang (2015) X X X X
Proposed method X X X X X X X
Figure 1: Fluxogram of the Proposed Methodology.
In this case, the first preprocessing is to define a
bounded area which includes the face using the Viola-
Jones’ algorithm (Viola and Jones, 2004). Once this
technique was developed for a two dimensional data,
we developed a simple adapted technique that allows
extract the three dimensional data using the two di-
mensional information (vertical and horizontal posi-
tions) from the face, due to a spacial correlation be-
tween 2D (RGB) and 3D (Depth) data. In Figure 1
these steps are described by light-blue color. Samples
of this preprocessing step are described in Figure 2.
Figure 2: Samples results of the 3D preprocessing step -
Subset S
f ace
.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
268
All results from this preprocessing step are de-
fined as a subset(S
f ace
) of three-dimensional data
points delimited by the horizontal and vertical spatial
dimensions containing a face of the individual/subject
to be recognized/verified and described by Equation
1.
S
f ace
⊂ Ω ∈ R
3
(1)
where Ω is a set of three dimensional data in spa-
cial domain R
3
. The subset S
f ace
consists of points
p
k
(x,y,z) where k = 1.. . w ... m.
3.2 Face Curvature Maps
Defining M
cov
as the Covariance Matrix of points
p
k
(x,y,z), described in Equation 2, which evaluates
covariance around of w three dimensional neighbor
points, as follows:
M
cov
=
1
w
n
w
n
∑
i=1
(p
i
− ¯p) · (p
i
− ¯p)
T
, (2)
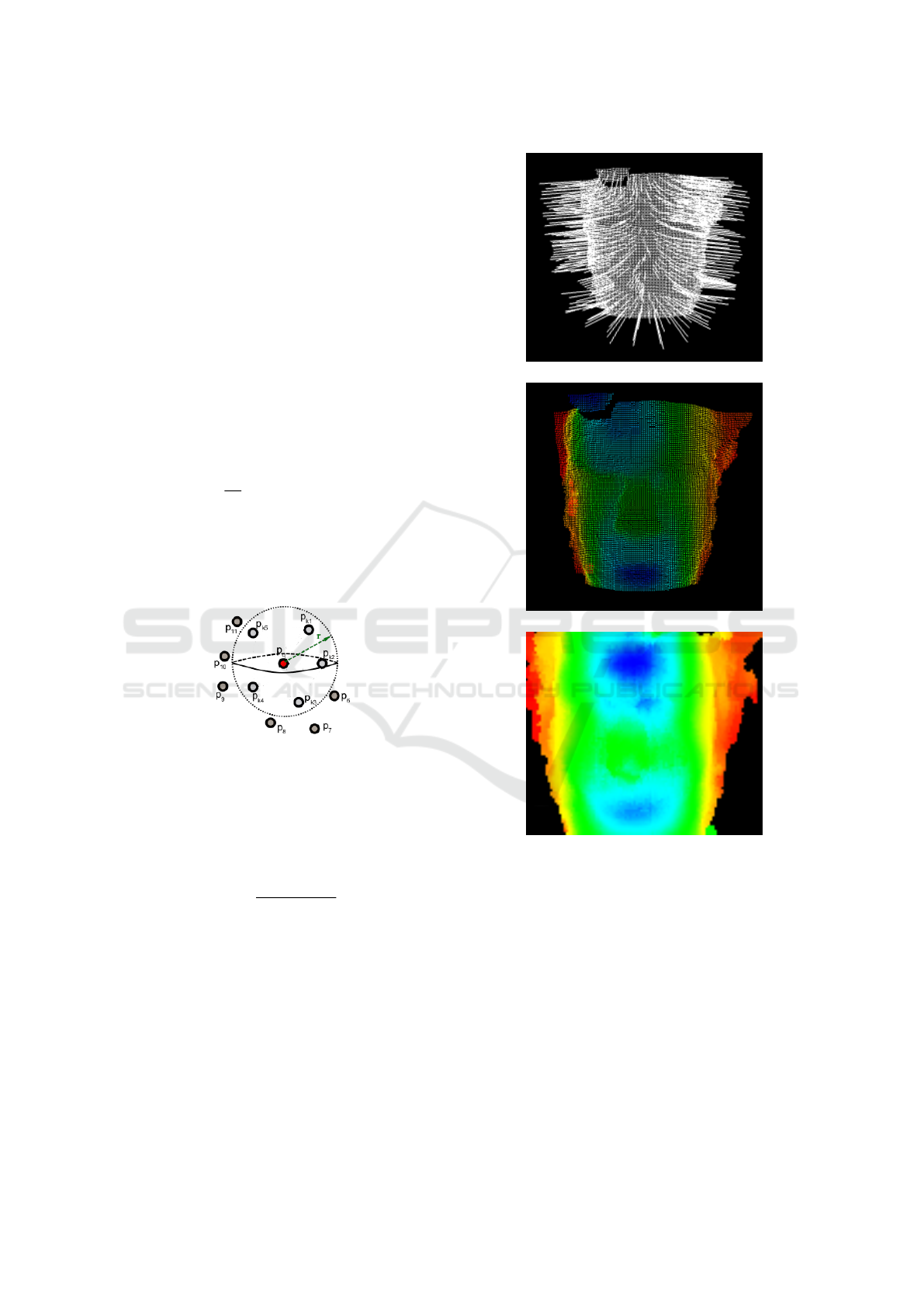
where ¯p is the centroid position of region bounded by
a defined radius r with w
n
neighbors of set points. The
relationship among the set of p
i
points and the radius
r is described on Figure 3.
Figure 3: Relationship among the set of p
i
points and the
radius r.
All face normal curvature indexes (C
v
) are evalu-
ated by Equations 3 and 4.
M
cov
· ~v
j
= σ
j
· ~v
j
, j ∈ {0, 1, 2}, (3)
C
v
=
σ
0
σ
0
+ σ
1
+ σ
2
(4)
where σ
j
and ~v
j
are the eigenvalues and eigenvec-
tor of matrix M
cov
respectively for each p
i
and σ
0
<
σ1 < σ2. In the next step, all extracted C
v
indexes
are normalized to values between 0(minimal value)
up to 1(maximum value) and described as a face in-
tensity color map, as described in Figure 4-(a) and
(b) as follows. Note that using this projection pro-
cess, all three-dimensional information are included
in a two-dimensional image, allowing to use any clas-
sic face recognition technique, for example the Eigen-
Faces(Belhumeur et al., 1997).
(a)
(b)
(c)
Figure 4: In (a) the Extracted Normal indexes and (b) cur-
vature color maps. For (c) is the normalized to 2D curvature
color map information.
3.3 Features Extraction
From curvature indexes C
v
all the geometric informa-
tion are carried out of each set of points from a subset
of 3D points clouds. The used features in the match-
ing stage are defined in according to each evaluated
histogram H in Equation 5.
m =
b
∑
i=1
H
i
(5)
3D Face Recognition on Point Cloud Data - An Approaching based on Curvature Map Projection using Low Resolution Devices
269

where b is the previously defined number of bins and
m, as previously defined, is the number of p
k
points
in a face subset S
f ace
. The variable b defines how
many features sets will be formed and for high values
of variable b, it implies in the addition of curvatures
information. Otherwise, for reduced values of b, less
curvature details are used in the feature vectors.
3.4 Similarity Matching
In according to (Jain et al., 2004), a biometric sys-
tem is essentially a pattern recognition system that
operates by obtaining biometric data of an individ-
ual, extracting a set of features of the acquired data
and comparing this set of features with the ones al-
ready stored in a database. Depending on the context,
a biometric system can work in a verification or iden-
tification mode. In the verification mode, the system
must validate the identity of an individual comparing
the captured biometric data with the previously cap-
tured and stored data in the database. In the identifi-
cation mode, the system must recognize an individual
by comparing the biometric data with all others pre-
viously stored in the database, searching for the most
similar one.
In this case we are focused on to solve a face veri-
fication problem using a Similarity Matching schema
presented by (Jain et al., 2004), that can be formally
defined as: Given an input vector of curvature indexes
features C
v
extracted from the 3D face data and an
alleged identity I, determine if (I,C
v
) belongs to the
class f
1
or f
2
, where f
1
indicates that the alleged iden-
tity is true and f
2
that it’s false. C
v
is compared with
C
I
, as the vector of biometric features of the individ-
ual I, to determine its class. Thus
(I,C
v
) ∈
(
f
1
, if S(C
v
,C
I
) ≥ t
f
2
, otherwise
(6)
where S is a function that measures the similar-
ity score between the vectors C
v
and C
I
, and t is the
predefined threshold. S(C
v
,C
I
) is called similarity
matching score between the biometric features of the
individual and the alleged identity. The identification
problem can be formally defined as: given as entry
a vector of features C
v
, determine if the identity I
k
,
where k ∈ {1, 2, ..., N, N + 1}. Here I
1
,I
2
,..., I
N
are
the identities already in the system and I
N+1
indicates
the rejected case, where no identity is compatible with
the users. Thus
C
v
∈
I
k
, if max
k
{S(C
v
,C
Ik
)} ≥ t,k = 1, 2, ..., N
I
N+1
, otherwise
(7)
where C
Ik
is the vector of biometric features cor-
responding to the identity I
k
, and t is a predefined
threshold.
4 RESULTS
In this Section are presented the evaluation of the pro-
posed methodology, describing details about the used
database and showing results in two specific tests sce-
narios as follows.
4.1 Database
As previously presented by the fluxogram on Figure
1, the VAP RGB-D Face Database by (Hg et al., 2012)
was used in order to perform the tests scenarios to
evaluate the proposed methodology. This database
provides 31 different subjects, each of them contain-
ing 17 sets of RGB-D images on different poses and
facial expressions (13 poses and 4 facial expressions).
Each pose or expression presents 3 images samples
composed by a RGB color space and a Depth data,
both registered (allowing the correlation of features
between them easily by a translation transform). The
sensor used for data acquisition of this database was
the Microso f t Kinect first generation (Zhang, 2012).
All acquired depth images were filtered in order to
treat occlusions and spikes to obtain a smoother and
hole-free Point Cloud data representation of each sub-
ject as described in (Hg et al., 2012).
The main objective of this proposed methodology
is to develop a face recognition algorithm in tests sce-
narios using only faces with the absence of rotation
and occlusion (generated by the face position in rela-
tion to the camera). Specifically in this case, only the
subject’s frontal face pose was used to allow evaluate
the influence of all parameters used to adjust the al-
gorithm’s behavior on the facial recognition process.
4.2 Evaluation Process
The evaluation process is composed by two tests sce-
narios, as described as follows:
4.2.1 First Scenario - Biometric Evaluation
In this scenario each subject - in a recognition (classi-
fication application) system - can be treated as a class.
The used method to provide a possible identification
(intra-personal score minimization) is analogue to a
classifier described in Section 3.4. The Equal Error
Rate (EER)(Trentin and Gori, 2001) can be defined
as an objective, threshold-independent measure of the
classifier’s performance for statistical pattern recogni-
tion, which is used to evaluate this classifier and com-
monly used to evaluate biometric systems.
To evaluate and minimize the errors of the pro-
posed methodology, the most influential variables
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
270
were selected (radius, bins), and then EER was ap-
plied to each one of these variables, defining the opti-
mal value for them.
The rejection criterion established to the ERR was
based in the score obtained from the minimization
function. The first criteria defined is the maximum
threshold, avoiding the false recognition from un-
known subjects and refusing badly acquired sensor
outputs. The second criteria is defined by a thresh-
old interval limitation between the two best enroll
matches if they do not belong to the same subject
(since each subject has 3 images samples), allowing
the system to presume doubt between two subjects,
and reject the input.
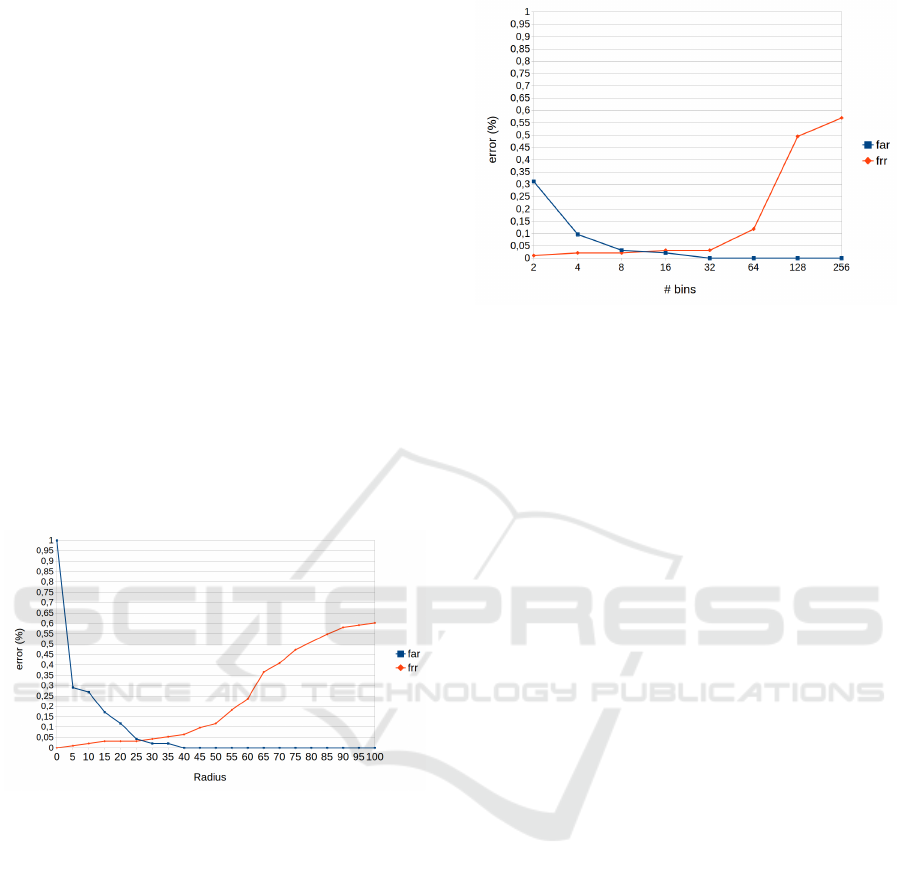
The radius, responsible for the vicinity description
of a point and, consequently, the curvature intensity
was analyzed in step intervals of 5, generating differ-
ent curvature maps and score for each radius value
from minimization function. In Figure 5 it is possible
to visualize the rates values of false acceptance and
false rejection obtained for each radius values, obtain-
ing an interception at the radius of 26.67, resulting in
an ERR of 3,58% for acceptance and rejection.
Figure 5: Equal Error Rate of Vicinity Radius.
Once the radius is the most independent and the
first required variable to be defined in the fluxogram
of the proposed methodology, all remaining variables
will use this optimal radius value fixed as reference to
define their optimal values from the EER method.
The subsequent analyzed variable is the number
of bins of the intensity histograms obtained from the
curvature maps. The ERR was applied with the same
previously criterion, with radius value fixed during
this analysis, changing only the number of bins used
to represent the histogram as described in Figure 6.
Although it is expected to obtain a better classifier
result using a higher number of bins representation
(and consequently intensity distribution), that doesn’t
guarantee a best discriminative value among subjects.
In Figure 6, values from 8 up to 16 bins achieved an
error of 2,5%, but the number of bins are restricted
to be a power of 2 (to guarantee the equal numeri-
Figure 6: Equal Error Rate of the number of bins.
cal distribution of the intensity values [ranged from
0 to 255]) and located in the exact average of 8 and
16, both of these values are optimal for the number
of bins in this application. The use of values greater
than 16 bins provided a higher disparity between the
images of a same subject, possibly due to the informa-
tion loss (caused by mainly by filtering process) and
the occlusions filling estimation done by (Hg et al.,
2012) preprocessing, which causes a higher rejection
rate and consequently false rejection as well.
4.2.2 Second Scenario - Accuracy Comparison
In order to obtain a real performance evaluation, this
scenario was developed to compare the performance
of the proposed methodology with others state-of-the-
art techniques related to the used data type and the
face recognition task. This evaluation is focused on
the Rank-1 Accuracy (Lathauwer et al., 2000) of the
facial recognition process, presented as the most usual
evaluation method found in the techniques used in
to comparison. Also, the True Positive Rates (TPR)
and False Positive Rates (FPR) were computed for
both variables Radius and Bins. Receiver Operating
Characteristic (ROC) Curves and Area Under Curves
(AUC) values for accuracy estimates are shown in
Figure 7.
The Rank-1 Accuracy is obtained by a ratio of the
relevant samples from the recognition process (true
positives and true negatives) and the total subject’s en-
rollments in the data base. From extensive tests used
to define parameters of the proposed methodology,
presented in previously test scenario, the best recogni-
tion results achieved an accuracy of 98, 92% and used
to be compared with the best performance of others
state-of-the-art techniques as described in Table 2.
To obtain a fair comparison, the selected tech-
niques were obtained related to the database present-
ing the identification task in facial recognition as well,
3D Face Recognition on Point Cloud Data - An Approaching based on Curvature Map Projection using Low Resolution Devices
271

Table 2: The best Rank 1 Accuracy of the face recognition algorithms related to the VAP RGB-D database.
Data Type Method Rank 1 (%)
RGB Images + Depth Map Goswami et al.(Goswami et al., 2014) 80.6
RGB Images + Depth Image Hu et al. (Hu et al., 2014) 90.0
RGB Images + Depth Image Bormann et al. (Bormann et al., 2013) 96.0
RGB Images + Depth Map Zhou et al. (Zhou et al., 2015) 95.9
Depth Map Saleh and Edirisinghe (Saleh and Edirisinghe, 2016) 96.67
RGB Images + Depth Map Chowdhury et al. (Chowdhury et al., 2016) 98.71
Point Cloud Proposed Methodology 98.92
based on different techniques. In Goswami et al.
(Goswami et al., 2013) a method is proposed to ex-
tract an entropy map from the depth map and the
RGB image of a person and a saliency map from
the RGB image, computing a histogram of gradient
(HOG) from these maps and classifying them by a
Random Forest (RDF). Other work from Goswami et
al. (Goswami et al., 2014) has presented improve-
ments adding a geometric attribute computation from
depth map fiducial points, creating the called RISE
(entropy and saliency maps) and ADM (geometric at-
tribute relation) descriptors.
In Hu et al. (Hu et al., 2014) was proposed a
face recognition for a user tracking robotics applica-
tion, using the depth map from head detection and
the RGB image for recognition by illumination nor-
malization, head pose correction and face space pro-
jection. Bormann et al. (Bormann et al., 2013) im-
plements a similar algorithm to Hu et al. algorithm,
Fisherfaces(Belhumeur et al., 1997) space parameter-
ization, a Support Vector Machine (SVM) and Near-
est Neighbor techniques for classification. Zhou et
al. (Zhou et al., 2015) proposed a three-dimensional
face recognition using 7 feature points and a two-level
Cascade Classifier, formed by a Decision Tree Classi-
fier in the first level, and an improved Euclidian Dis-
tance classifier in the second level. Saleh and Ediris-
inghe proposed an Eigenface-based method, training
models with eigenfaces applied to the normal images
and depth images, under different illumination con-
ditions. Chowdhury et al. (Chowdhury et al., 2016)
proposed a method based on machine learning, that
trains a Neural Network to reconstruct the depth map
from a color image, using the color image and the
real depth map as input elements, and classifying the
reconstructed depth map through another multi class
neural network.
Although close in accuracy performance results
(Figure 7), all considered values above the limits of
excellent (i.e. AUC ≈ 0.90), the estimate for Bin val-
ues (AUC = 0.92) is a 0.02 better than for Radius
vicinity values (AUC = 0.90). All curves are well
over the chance value (i.e. AUC = 0.50).
Figure 7: ROC Curves of Radius and Bins.
5 CONCLUSIONS
This work proposes a methodology based on Point
Cloud face data using curvature map projection for
face recognition. The proposed methodology was
evaluate on two scenarios for biometrics and accu-
racy that describe all features and details about the
parameters setup and performance influence on face
recognition process.
The Table 2 presents all the Rank-1 Accuracy
obtained in each state-of-the-art technique and con-
cludes that the results obtained by the proposed
methodology outperform the best achieved results
of all the mentioned techniques. This information
demonstrates that the proposed methodology is qual-
ified to be applied in three-dimensional face recogni-
tion problems. In the experiments, the accuracy was
also evaluated plotting Receiver Operating Character-
istic (ROC) Curves and achieving excellent result for
both analyzed variables.
All analysis must be carefully accomplished, since
the implemented techniques in each work are differ-
ent and there are specifics variations in relation to
the used data base, the used data type and their ex-
perimentations. This allows to archive the conclu-
sion that our proposed methodology presents com-
petitive scores compared to all those techniques. In
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
272

the end, the proposed test scenarios relied on the use
of the VAP RGB-D database (Hg et al., 2012) (due
to its public availability), and the full comparison to
others techniques were impaired due to their experi-
mentations in private data bases. Future works seek
to experiment the proposed methodology in private
databases to obtain broader results.
REFERENCES
Belhumeur, P. N., Hespanha, J. a. P., and Kriegman, D. J.
(1997). Eigenfaces vs. fisherfaces: Recognition using
class specific linear projection. IEEE Trans. Pattern
Anal. Mach. Intell., 19(7):711–720.
Borgi, M. A., Labate, D., El Arbi, M., and Amar, C. B.
(2015). Sparse multi-stage regularized feature learn-
ing for robust face recognition. Expert Systems with
Applications, 42(1):269–279.
Bormann, R., Zw
¨
olfer, T., Fischer, J., Hampp, J., and
H
¨
agele, M. (2013). Person recognition for service
robotics applications. In Humanoid Robots (Hu-
manoids), 2013 13th IEEE-RAS International Confer-
ence on, pages 260–267. IEEE.
Bowyer, K. W., Chang, K., and Flynn, P. (2006). A survey
of approaches and challenges in 3d and multi-modal
3d+ 2d face recognition. Computer vision and image
understanding, 101(1):1–15.
Burrows, A. M. and Cohn, J. F. (2009). Anatomy of face. In
Encyclopedia of Biometrics, pages 16–23. Springer.
Chen, Z., Huang, W., and Lv, Z. (2017). Towards a face
recognition method based on uncorrelated discrimi-
nant sparse preserving projection. Multimedia Tools
and Applications, 76(17):17669–17683.
Chowdhury, A., Ghosh, S., Singh, R., and Vatsa, M. (2016).
Rgb-d face recognition via learning-based reconstruc-
tion. In Biometrics Theory, Applications and Systems
(BTAS), 2016 IEEE 8th International Conference on,
pages 1–7. IEEE.
Goswami, G., Bharadwaj, S., Vatsa, M., and Singh, R.
(2013). On rgb-d face recognition using kinect.
In Biometrics: Theory, Applications and Systems
(BTAS), 2013 IEEE Sixth International Conference
on, pages 1–6. IEEE.
Goswami, G., Vatsa, M., and Singh, R. (2014). Rgb-d face
recognition with texture and attribute features. IEEE
Transactions on Information Forensics and Security,
9(10):1629–1640.
Haghighat, M., Abdel-Mottaleb, M., and Alhalabi, W.
(2016). Fully automatic face normalization and sin-
gle sample face recognition in unconstrained environ-
ments. Expert Systems with Applications, 47:23–34.
Haykin, S. and Network, N. (2004). A comprehensive foun-
dation. Neural Networks, 2(2004):41.
Hesher, C., Srivastava, A., and Erlebacher, G. (2003).
A novel technique for face recognition using range
imaging. In Signal processing and its applications,
2003. Proceedings. Seventh international symposium
on, volume 2, pages 201–204. IEEE.
Hg, R., Jasek, P., Rofidal, C., Nasrollahi, K., Moeslund,
T. B., and Tranchet, G. (2012). An rgb-d database us-
ing microsoft’s kinect for windows for face detection.
In Signal Image Technology and Internet Based Sys-
tems (SITIS), 2012 Eighth International Conference
on, pages 42–46. IEEE.
Hu, N., Bormann, R., Zw
¨
olfer, T., and Kr
¨
ose, B. (2014).
Multi-user identification and efficient user approach-
ing by fusing robot and ambient sensors. In Robotics
and Automation (ICRA), 2014 IEEE International
Conference on, pages 5299–5306. IEEE.
Jain, A., Hong, L., and Pankanti, S. (2000). Biometric iden-
tification. Communications of the ACM, 43(2):90–98.
Jain, A. K., Ross, A., and Prabhakar, S. (2004). An intro-
duction to biometric recognition. IEEE Transactions
on circuits and systems for video technology, 14(1):4–
20.
Kim, D., Hernandez, M., Choi, J., and Medioni, G.
(2017). Deep 3d face identification. arXiv preprint
arXiv:1703.10714.
Lathauwer, L. D., Moor, B. D., and Vandewalle, J. (2000).
On the best rank-1 and rank-(r1,r2,. . .,rn) approxima-
tion of higher-order tensors. SIAM J. Matrix Anal.
Appl., 21(4):1324–1342.
Papatheodorou, T. and Rueckert, D. (2007). 3d face recog-
nition. In Face Recognition. InTech.
Patil, H., Kothari, A., and Bhurchandi, K. (2015). 3-d face
recognition: features, databases, algorithms and chal-
lenges. Artificial Intelligence Review, 44(3):393–441.
Saleh, Y. and Edirisinghe, E. (2016). Novel approach to
enhance face recognition using depth maps. In Sys-
tems, Signals and Image Processing (IWSSIP), 2016
International Conference on, pages 1–4. IEEE.
Soldera, J., Schu, G., Schardosim, L. R., and Beltrao, E. T.
(2017). Facial biometrics and applications. IEEE In-
strumentation & Measurement Magazine, 20(2):4–10.
Trentin, E. and Gori, M. (2001). A survey of hybrid
ann/hmm models for automatic speech recognition.
Neurocomputing, 37(1):91–126.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. Int. J. Comput. Vision, 57(2):137–154.
Zaghetto, C., Aguiar, L. H. M., Zaghetto, A., Ralha, C. G.,
and de Barros Vidal, F. (2017). Agent-based frame-
work to individual tracking in unconstrained environ-
ments. Expert Systems with Applications, 87:118–
128.
Zhang, Z. (2012). Microsoft kinect sensor and its effect.
IEEE MultiMedia, 19(2):4–10.
Zhou, W., Chen, J.-x., and Wang, L. (2015). A rgb-d face
recognition approach without confronting the cam-
era. In Computer and Communications (ICCC), 2015
IEEE International Conference on, pages 109–114.
IEEE.
3D Face Recognition on Point Cloud Data - An Approaching based on Curvature Map Projection using Low Resolution Devices
273
