
loop
A Trace-based Emulator for Vehicular Ad Hoc Networks
Pedro Cirne
1
, Andr
´
e Z
´
uquete
2
and Susana Sargento
1
1
Instituto de Telecomunicac¸
˜
oes, Universidade de Aveiro (IT-UA), Aveiro, Portugal
2
DETI/IEETA, Universidade de Aveiro, Aveiro, Portugal
Keywords:
VANET Traces, Performance Analysis, Secure Routing.
Abstract:
In this paper we present loop (loop over orderly phases), a trace-based emulator for Vehicular ad hoc networks
(VANETs). This is an alternative and novel method to evaluate improvements on VANET protocols, which
relies and takes advantage of real data samples collected from an existing network. Those samples are vehicles’
geographical locations and radio reception events, which represent mobility and communication patterns of the
VANET. From those samples, loop creates a synthetic environment to simulate and evaluate communication
protocols on the target VANET. loop also includes an interactive mode to manage the emulation process
and a visualization mode that shows different time and geographical-dependent aspects. The development of
loop was motivated by the need of an non-intrusive methodology to intensively analyse and deterministically
compare the impact of several strategies for communication protocols and all their possible variations in a
realistic scenario, both in terms of mobility and radio communication opportunities. Namely, we created loop
to evaluate the impact of adding security features to the routing control plane of an VANET. Since the VANET
includes hundreds of vehicles, the computational performance is critical to speed-up evaluations. With loop
we were able to perform complex, multi-variable performance evaluations of 24 hour periods in durations
ranging from 6 up to 30 minutes.
1 INTRODUCTION
VANETs are a class of wireless ad hoc networks
where the majority of the nodes are carried by ve-
hicles and a relatively small part are placed near
roads. The former is known as On Board Unit (OBU)
and the latter as Road Side Unit (RSU)
1
. VANETs
may have hundreds or thousands of nodes and inherit
most of the characteristics of Mobile Ad Hoc Net-
works (MANETs). Nonetheless, by their very sin-
gular nature and requirements when compared with
MANETs (Engoulou et al., 2014; Qu et al., 2015; Bali
et al., 2014; Amit Dua, 2014), the academic research
community has given an increasing amount of atten-
tion to the topic and its challenging tasks.
In wireless networks, the design of new commu-
nication protocols cannot ignore that the overall per-
formance will be affected by external and uncon-
trolled conditions, such as environmental and spatial.
When the existence of those conditions is not properly
considered, the protocols may not behave according
1
We may indistinctly refer both types of nodes as
VANET Units (VUs).
to the expectations when deployed in real scenarios.
Moreover, some conditions may be completely irre-
producible, which makes it impossible to perform a
fair comparison among different strategies. Simula-
tion tools can mitigate some of these drawbacks.
The complexity and cost involved in the deploy-
ment of a city-scale VANET led to the develop-
ment of numerous tools aiming to simulate the mo-
bility and the radio propagation characteristics of a
VANET (Ros et al., 2014). Nevertheless, the results
yielded by simulators, especially in large scale wire-
less networks and mobile networks, are highly influ-
enced by propagation and mobility models and their
discrepancies with the real world (Tan et al., 2010).
Furthermore, the use of any of the existent simulators
to validate communication protocols in VANETs can
provide unrelated results when deploying the proto-
cols in an existent VANET (Viriyasitavat et al., 2011;
Uppoor et al., 2013; Ros et al., 2014; Lim et al.,
2016).
Cirne, P., Zúquete, A. and Sargento, S.
loop - A Trace-based Emulator for Vehicular Ad Hoc Networks.
DOI: 10.5220/0006854503910402
In Proceedings of 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2018), pages 391-402
ISBN: 978-989-758-323-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
391

1.1 Motivation
The main objective of our work is to study commu-
nication protocols in VANETs. For that purpose, we
consider as a very important use case the VANET op-
erating in Porto city (FutureCities Project, 2017), cur-
rently with more than 600 VANET Units (VUs). In
this VANET, the OBUs are devices carried by buses.
These OBU’s, together with a small set of 50 RSU’s,
provide an IP routing service that provides Internet
connectivity to the buses’ passengers.
Since we already have a deployed VANET, we
could take advantage of this network and use it for
real experiments, instead of modelled data. However,
using a real VANET to test new ideas and functional-
ities would be critical, specially in the early develop-
ment stages, since they could put the entire VANET
operation at risk. Alternatively, limiting the tests to a
small number of devices could lead to biased evalua-
tions. In both cases, considering the uncontrolled pa-
rameters (e.g. human factors and environmental con-
ditions), the experiments could not be completely
controlled, so not repetitive nor re-analysable under
the same conditions (Schiller and Knoll, 2015; Buis-
set et al., 2010). Finally, running tests in the VANET
would make the results appear slowly, without any
possibility of speedup over the wall-clock time.
However, once having a VANET up and running,
an interesting a posteriori alternative is to start from
mobility and radio reception samples, collected in that
VANET, and use them as the starting point to study
the performance of communication protocols. This
allows us to improve the protocols already in place
or to create new ones without having to use modelled
data.
This led us to create a trace-based emulator, loop
(loop over orderly phases), to support the evaluation
of protocols in VANETs given from a set of contex-
tual data sampled in a real VANET, instead of models
(mobility, radio propagation, etc.). With loop we are
able to simulate a variety of modifications in the pro-
tocols under test for exactly the same contextual data.
Note, however, that this contextual data can also be
provided by mobility and communication models, in-
stead of being real samples.
1.2 Contributions
The main contribution of this article is the specifi-
cation of loop, a trace-based emulator of VANET
protocols. loop uses previously collected traces of
vehicle’s location and the correspondent connectivity
information among VUs to simulate multiple, inter-
dependent protocols and evaluate their overall qual-
ity. loop can simulate the protocols with an arbitrary
speedup over wall-clock while interacting with ex-
ternal real system applications running at wall-clock
time.
loop was initially created to exhaustively evalu-
ate the performance and impact of TROPHY (Trust-
worthy VANET routing with group authentication
keys (Cirne et al., 2018)) protocols in the routing con-
trol plane being used in the Porto’s VANET. While
building a tool for that specific purpose, we envi-
sioned similar requirements in a near future for other
types of protocols. Therefore, we conceived loop for
tackling our specific and well-defined problem, but
still with special attention on modularity and future
extensions to support other distinct use cases.
loop was developed in C++ for performance and
modularity. It includes an almost lock-free logging
system to collect data for a posteriori analysis with
minimum interference, a visualization system to show
any time-dependent state of the VANET and an inter-
active mode in a Command-Line Interface (CLI) style
with the possibility to run pre-scheduled commands in
batch. Such commands can be used to trigger events
in the simulation in specific circumstances (e.g. time).
While developing loop, we focused on perfor-
mance and scalability, decoupling and parallelizing
processes as much as possible, since those would be
important factors for the immediate and future suc-
cess of the tool. Each time a compromise between
performance and non-technical usability emerged, we
have chosen performance. We made considerable ef-
forts to make loop specially developer and technical-
user friendly. We did not sacrifice performance nei-
ther increased code complexity for non-technical user
facilities, e.g. a visually rich command GUI (Graphi-
cal User Interface).
In our specific use case (Cirne et al., 2018), run-
ning in a high-end desktop computer
2
, loop emulated
24 hours of VANET interactions on our most demand-
ing scenario, with a 1 millisecond time granularity
and devices exchanging messages in periods of 100
milliseconds, in less than 30 minutes. This includes
the simulation of all the required protocols among 446
devices, namely, a protocol for the vanilla routing and
another distinct set of protocols for the secure rout-
ing. In that time frame, we simulated both protocols,
comparing and logging the relevant differences for a
posteriori analysis.
When compared with scenarios where traffic and
network simulators are used, our strategy has the ad-
vantage of having a high level of detail and accuracy
since both mobility and network conditions are real-
istic. Besides that, this gives an extreme flexibility
2
Intel(R) Core(TM) i7-7700 CPU @ 3.60GHz
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
392

to evaluate scenarios on deployed VANETs without
the need for valid mobility or network models. On
the other hand, when compared with tests performed
in deployed VANETs, it has the benefits of being non-
intrusive and non-destrutive, as well as free of logistic
and business constraints.
2 RELATED WORK
Simulators have been considered the most important
tools for the design and evaluation in works related
with VANETs (Ros et al., 2014). Under the VANETs
context, we have two distinct categories of simulators
to be considered: microscopic traffic simulators and
network simulators.
The microscopic traffic simulators generate traces
of vehicles and possible other entities (Krajzewicz,
2010; Conceic¸
˜
ao et al., 2008; Park and Qi, 2006;
Cameron et al., 1994; Choffnes and Bustamante,
2005; Owen et al., 2000; H
¨
arri et al., 2006), while
network simulators use those traces to simulate the
communications between entities (Ikeda et al., 2011;
Varga and Hornig, 2008; Barr et al., 2005; Pal, 2012).
With a few exceptions that implement both types
of simulators side-by-side (Wang et al., 2007; Mang-
haram et al., 2006), the two types are decoupled and
independently developed from each other. Other sim-
ulators that integrate one network simulator and one
microscopic traffic simulator provide a bridge be-
tween them and give some extra facilities to deal with
VANET’ specific scenarios (Sommer et al., 2008;
Pi
´
orkowski et al., 2008).
The use of simulators is subject to the problem of
the assumptions and the correspondent performance
of the models in use. It is widely accepted that
simplistic wireless-related models lead to biased re-
sults (Ros et al., 2014; Lim et al., 2016) and mobility
patterns have a huge influence in the results yielded
by mobility dependent simulators (Viriyasitavat et al.,
2011; Uppoor et al., 2013). Moreover, increasing the
accuracy in VANET models, as well as the number
of devices being simulated, is intrinsically associated
to an increase of mathematical complexity (Uppoor
et al., 2013) and subsequent performance issues.
By using real traces with mobility and network
characteristics embedded, we remove a huge stack
of complexity and possible sources of biased re-
sults. However, the use of collected data to emulate
VANETs is not a common approach found in liter-
ature, because it requires a deployed VANET in the
first place.
The emulation of mobile networks based on col-
lected traces was firstly proposed by Noble et al. (No-
ble et al., 1997). Although in distinct conditions,
the authors highlighted a question for which, in the
VANETs context, neither real tests nor simulations
are the answer: ”How does one subject a mobile com-
puting system to realistic yet reproducible wireless
networking conditions?”. The proposed answer given
by the authors excludes real tests due to the lack of re-
producibility and relies on collected traces to create a
“synthetic networking environment rather than a syn-
thetic workload” as done by simulators. We followed
the idea of creating a synthetic networking environ-
ment (loop, the VANET emulator) but with clear dif-
ferences in terms of implementation, since on top of
the emulator we still have synthetic workloads (the
protocols being emulated).
In (Noble et al., 1997) the authors developed their
work based on traces of end-to-end connections and
the emulation of unmodified applications, running at
wall-clock time. We, by contrast, used traces of point-
to-point connections to simulate different protocols
based on a model of the protocol, possibly interact-
ing with external entities. Since we are modeling
protocols, we still have synthetic workloads. How-
ever, compared with mobility and propagation mod-
els, modeling network protocols is much less criti-
cal and prone to biased results. Besides, we have
the advantage of running simulations faster then wall-
clock time, even when interacting with external appli-
cations.
The concept of a simulated network interacting
with a real system was introduced by Fall (Fall, 1999)
as network emulation. Along with it, the author high-
lights the problem of coupling two entities with dif-
ferent notions of time: real system and a simulator
running faster than wall-clock time. Fall solves the
problem by introducing a delay in the simulation, run-
ning the coupled system at wall-clock time.
(Weing
¨
artner et al., 2011) tackled the same prob-
lem by using an independent synchronization compo-
nent and execute both the simulated network and the
real system in a virtualized environment with virtual-
ized time controlled by the synchronization compo-
nent. This solution was proposed for cases where the
simulation runs slower than wall-clock time. Each en-
tity is allowed to run for a certain amount of time and
then blocks until all others entities reach the same vir-
tual point in time.
We solved this problem using self-synchronised
interactions between loop and coupled real systems,
i.e. on each contact made by loop it is sent the
time-stamp of the simulation and (if needed) the cou-
pled system should use this temporal information. By
doing this we allow loop to run with an arbitrary
speedup over wall-clock time. Internally, loop shares
loop - A Trace-based Emulator for Vehicular Ad Hoc Networks
393
with the work presented by Weing
¨
artner et al. a simi-
lar notion of multiple slices of time and synchroniza-
tion points between slices.
Buisset et al. (Buisset et al., 2010) presented a
work focused in vehicular network emulation. Al-
though being the very same topic, the requirements
and directions of their work do not match any of ours.
The emulation of a small number of devices implies
the use of multiple operative systems executing mul-
tiple processes. Our requirements do not allow such
architecture, mainly due to the lack of scalability.
Schiller et al. (Schiller and Knoll, 2015) pre-
sented a work related with VANETs’ emulation fo-
cused on the evaluation of automotive embedded sys-
tems. Their goal is clearly distinct from ours, since
it is focused on the evaluation of unmodified applica-
tions running on embedded system, rather than net-
work protocols.
Pessoa et al. (Pessoa et al., 2017) proposed the
emulation of a VANET focused on content distribu-
tion and Delay-Tolerant Networks (DTNs). The au-
thors propose the use of real traces of vehicles and
real network information along with the emulation
of one VU per operative system process, sockets for
inter-process communication and a complex architec-
ture to deliver time-dependent information, made out
of a distributed messaging framework and an Apache
server with a PHP module to connect to a MySQL
database in order to provide JSON data over HTTP.
Comparing with this last approach, we model the
protocols instead of having them being implemented
by independent processes, one per VU. Each VU is
represented by its own internal state, and each phase is
responsible for the modification of a well-defined part
of it. The interaction between the different emulated
VUs is implemented by lock-free memory accesses,
and the time-dependent information is preloaded and
made available to the emulation without causing de-
lays. All those differences allow loop to run with a
high speedup over wall-clock, not possible when us-
ing numerous operating system processes. Further-
more, in terms of resource consumption loop it is ex-
tremely lighter, since it uses a single process with a
small number of threads. The results presented in this
article were obtained with a single thread. Still, we
are not limited to a single thread and can adapt this
number to the target machine and the tasks running in
the emulator.
Finally, in general the integration of real traces
with the most common simulators used nowadays
is a task with remarkable limitations and challenges
caused by the different approaches (simulation versus
emulation) and their influence in the software archi-
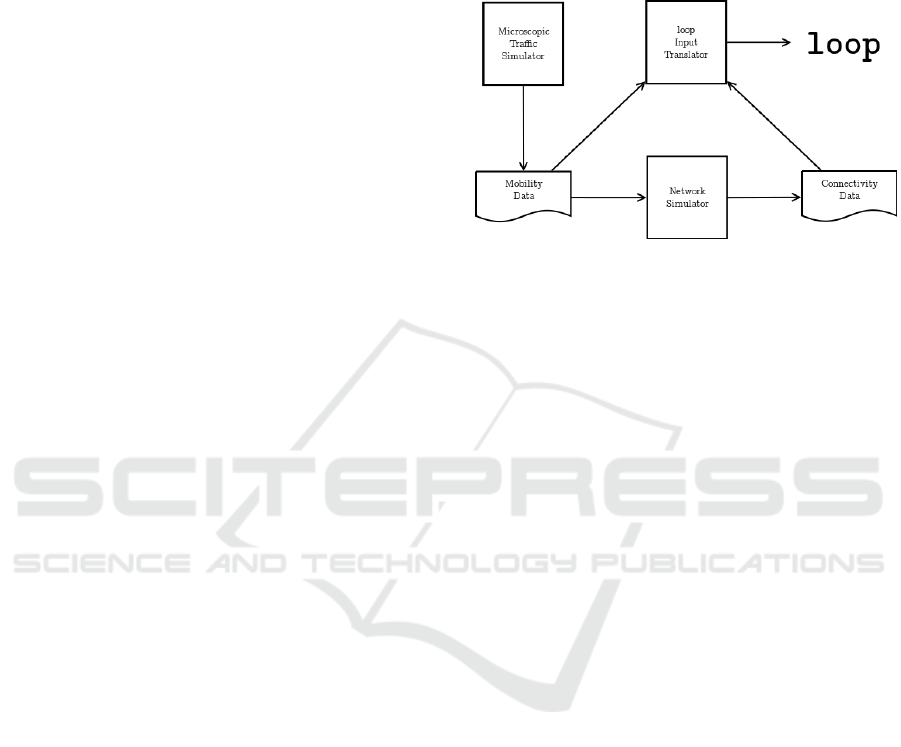
tecture (Fontes et al., 2017). On the contrary, loop
can be easily integrated with mobility and network
simulators, as these can provide the data (modeled
data, in this case, instead of sampled data) it uses for
emulating scenarios where protocols are to be tested,
as shown in Figure 1.
Figure 1: loop relying on mobility and network simulators
to generate the input data.
3 loop
loop is a trace-based VANET emulator that creates
a synthetic environment to simulate VANET-related
protocols that may need to interact with real applica-
tions. It was conceived tacking into consideration the
following assumptions:
1. Simulate mobility and network status of a VANET
is hard and not accurate.
2. Network protocols are the easier and less critical
component to model and simulate.
3. Applications external with the VANET are likely
to be complex and so, not likely to be easily sim-
ulated nor emulated.
Based on (1), we decided to emulate both mobility
and network status from input data in order to capture
all the real details. Based on (2), we model protocols,
on a needed basis, according to strict rules that ben-
efit speedup over wall-clock. Finally, based on (3)
we guarantee that we can interconnect external ap-
plications with very limit modifications, even if such
requirement becomes reflected in the models of the
protocols being simulated.
loop has multiple threads of execution. The visu-
alization and the interaction features run in two sep-
arate threads. Since they only offer extra output and
input features, and may not be needed in all use cases,
they can be activated and deactivated on a needed ba-
sis. The only thread always running is the one associ-
ated to the evolution on the emulation state.
The core of the emulation is a loop over differ-
ent phases, repetitively over the time, where each of
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
394
the phases is responsible for a well-defined part of the
task being simulated.
We prepared loop to emulate discrete time slices.
The total emulated time is divided into two fixed pe-
riods: macro periods and micro periods, each com-
posed by a set of homogeneous time splices. The
macro period has to be equal or greater than the micro
period, so one macro period always has one or more
micro periods. All these time intervals can be cus-
tomized. For emulations in (Cirne et al., 2018), each
time slice was set to 1 millisecond, macro periods to
2 seconds and micro periods to 100 milliseconds.
The macro period is associated to the periodicity
of the changes on the emulator internal state. By ’em-
ulator internal state’ we mean all the state that only
exists for convenience of the emulation (e.g. update
the traces’ information available and the graphical vi-
sualization). In other words, macro periods reflect in-
tervals where the status of the VANET, in terms of
location of VUs and their connectivity, remains con-
stant. Naturally, it should be equal to the time interval
between consecutive real VANET samples.
The micro period is associated to the periodicity
of the changes on the VUs internal state. This state is
solely associated to modelled protocols, which may or
not be able to exchange messages between VUs given
the current connectivity status within by the macro pe-
riod.
3.1 Phases of the Emulation
loop separates its internal state from the state of the
VUs. Different protocols are modeled based on the
division into multiple tasks. Generically, each task
can have up to 4 different execution phases:
1. once on macro period start;
2. once on micro period start;
3. on macro period;
4. on micro period.
The former two execution phases are associated
to the state of the emulator; thus, the state of the VUs
is only accessible for reading operations and not al-
lowed to be modified. The latter two phases of execu-
tion are VU’s specific and executed for each VU with
permission to modify its state (as well as permission
to read all the other VUs’ public state).
VUs are associated to one specific time slice of
the micro period and keep that same position in the
multiple micro periods until the end of the emulation.
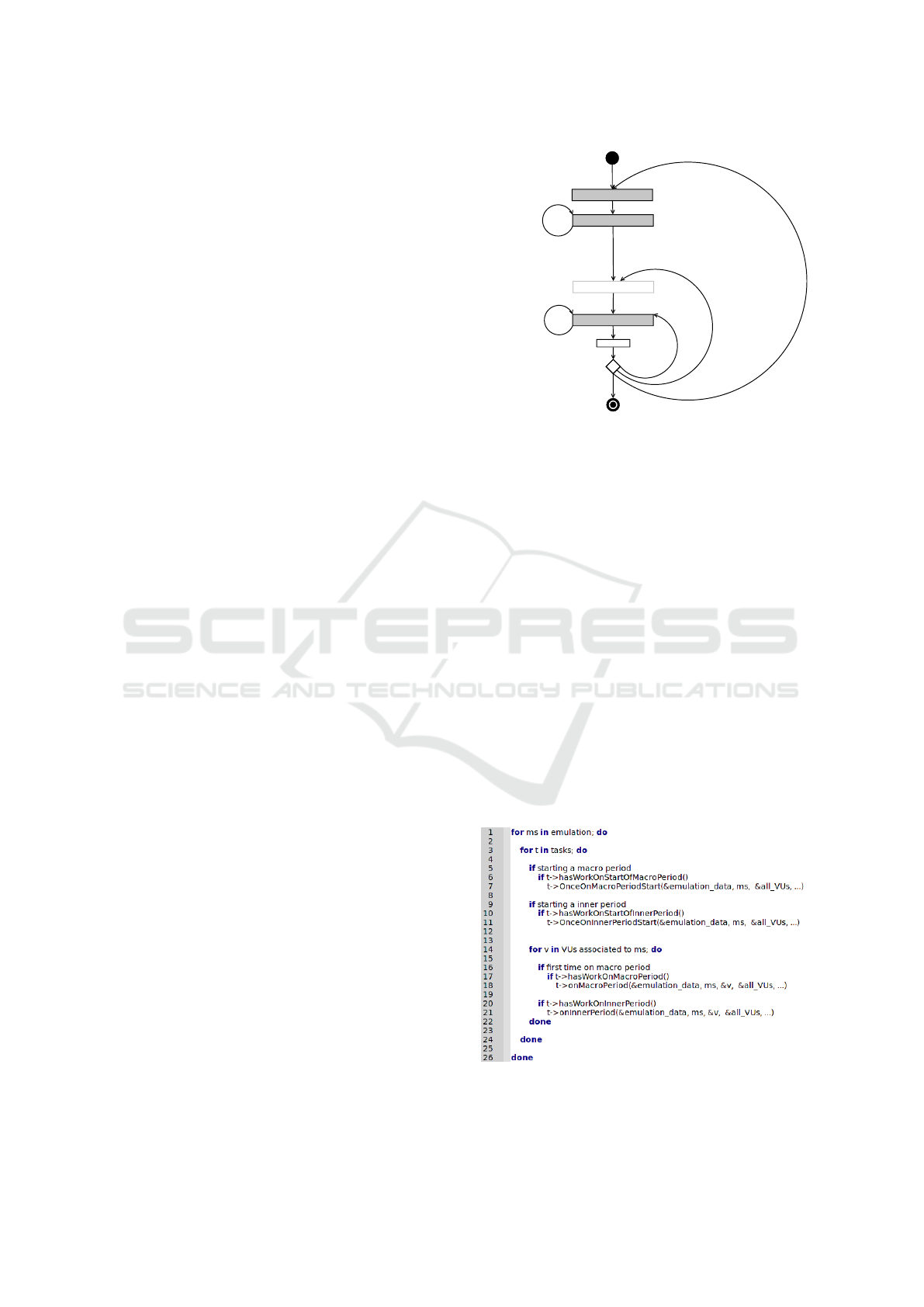
loop jumps from time slice to time slice and for each
task, on a needed basis, it executes the code associated
to each phase. The different phases of execution are
shown in Figure 2.
once on macro period start
on macro period
on inner period
once on inner period start
MS%100!=0
AND
MS%2000!=0
MS+=1
MS%2000==0
MS%100==0
FOR ALL VUs
FOR EACH VU ASSOCIATED
TO THE SPECIFIC MS
END OF EMULATION
Figure 2: Execution phases of loop (with "%" representing
the modulo operation and "==" and "!=" boolean tests).
To guarantee the determinism of the execution
of the tasks, if two or more VUs are associated to
the same millisecond, running each of the task on
that millisecond should yield the same result indepen-
dently of the order. This is obtained enforcing a strict
rule for all the phases: the visible state of each VU is
immutable. With this guarantee, we can concurrently
apply the same task in all the VUs associated to the
same time slice.
loop was built with C++ and the generic task
was implemented as an abstract stateless C++ class.
Well defined tasks should be implemented by state-
less classes with a relation of inheritance to the ab-
stract class. After the initial setup, where VUs are
associated to a millisecond of the micro period and a
list of tasks (a list of C++ object pointers) is created,
loop runs based on successive calls to the members of
the task objects that represent the phases of execution
(see Figure 3).
Figure 3: Pseudo code of loop.
loop - A Trace-based Emulator for Vehicular Ad Hoc Networks
395
3.1.1 Communication with External
Applications
Since loop was built to run protocol models faster
than wall-clock time and possibly interact with real
applications, time synchronization is an issue. We
solve this problem while being conservative, i.e., by
creating well-defined points of synchronization to
avoid inconsistent states. This is done by imposing
all of the following three conditions:
1. Interactions are always initiated by loop;
2. The time of the real application is synchronized
with loop time in all the interactions;
3. loop blocks while the real system takes actions
relatively to loop time.
As consequence, the real applications interacting with
loop can only react to contacts made by loop. Taking
in consideration that we want a fully reproducible en-
vironment, truly sporadic events from external appli-
cations to loop are not desirable. Effects of predicted
events from applications can be supported as part of
the implemented protocol model, by using a polling
strategy. Although this clearly increases the complex-
ity of the protocol being modeled, it is essential to let
the coupled system run faster than wall-clock. The al-
ternative would be bidirectional synchronization with
an external application running at wall-clock time,
which would force the coupled system to run all to-
gether at wall-clock time.
Time synchronization is currently achieved by
sending the simulation time in all the contacts made
by loop with external applications, which need to be
modified to receive it.
For a unidirectional flow of information, from
loop to an application, during the exchange of infor-
mation loop blocks and the application takes actions
relatively to the emulation time.
For a non-instantaneous bidirectional flow of in-
formation, both round-trip delay and the time taken
to process the request is considered in the protocol
model used within loop. Namely, the (blocking) con-
nection should be delayed and the effect will only be
visible at a well-defined time.
3.2 Simulation of Protocols
We simulate the 2 versions of the routing protocol
side by side: a protocol for the vanilla routing al-
ready in use (an insecure one), and another distinct set
of protocols for the secure routing being tested. We
identified 3 distinct tasks and implemented the 3 cor-
respondent C++ classes with members (representing
phases) to be executed in loop during the emulation
time. Those tasks are, in order:
1. Apply the effect of time (Proc)
2. Transmit information (Tx)
3. Receive information (Rx)
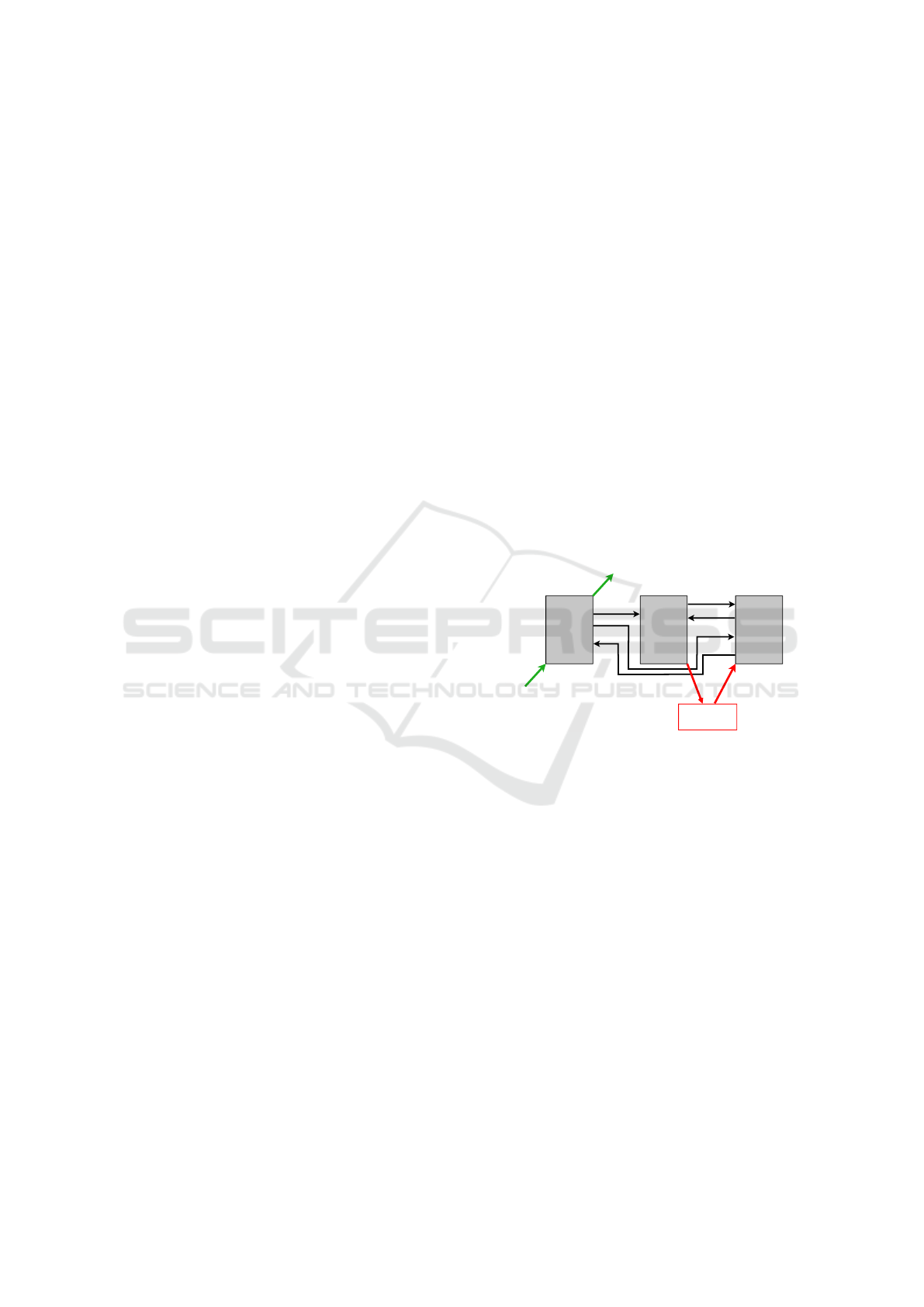
The different tasks influence each other, as de-
scribed in Figure 4. In the figure, an arrow between
tasks A → B, represents a relation of influence of A
on B. The labels are used to identify the cases in
the following explanations. Left to right arrows (→)
represent an immediate influence visible for the next
phase, right to left ones (←) represent delayed in-
fluence, only visible one micro period or one macro
period later. Black arrows represent internal influ-
ence (i.e., the same VU), red ones represent influ-
ence across multiple VUs, and green ones represent
the optional external interaction (IN) and the optional
visualization (OUT). Since tasks are implemented by
stateless objects, the influence is not in the tasks them-
selves but in the VUs and loop global state used by
the tasks.
PROC TX
RX
A
A
A
OUT
IN
VU
A
(1)
(1)
(1)
(2)
(3)
(4)
(4)
(5)
Neighbors
Figure 4: Influence of tasks between each other.
We built a Key Distribution Center (KDC) as a
TCP/IP server that receives and handles the requests
made by the emulator as they were made by real
RSUs. The KDC was built to run in a real environ-
ment but prepared to receive the emulation time along
with each contact made by loop. Since the KDC has
to interact with loop, some facilities were included
for the start and the end of each emulation.
Since all the loop requirements will not be needed
when running the KDC in real environment, we kept
the logic of the KDC decoupled from them. For the
start and the end of each emulation this is transparent,
since in real environment such functionalities can be
simply deactivated. The time synchronization mech-
anism is implemented at an early stage of each re-
quest. Although not completely transparent, the re-
quired changes are limited in scope. All the other
specific emulation requirements are part of the pro-
tocol models, and so, the KDC used with loop can be
used with real RSUs.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
396

The interactions between vehicular elements and
KDC are supported by the CLI of loop.
3.2.1 Task PROC: Apply the Effect of Time
This task has two phases of execution, both associ-
ated with macro periods: one to update the state of
VUs and another one to update the state of the emu-
lator. Updating the state of VUs consists on set them
as online or offline (1). When the VUs are online, the
position and the list of neighbors are also updated on a
needed basis. Updating the state of the emulator con-
sists on handling all the counters in use for logging
purposes, as well as to prepare a new visualization for
the specific macro period. The visualization is depen-
dent of the previous messages received (4).
3.2.2 Task TX: Transmit Information
This task has two phases of execution for VUs, for
both macro and micro periods. In the micro periods
(of 100 milliseconds) we model the transmission of
routing messages by all VUs. The other type of trans-
missions, the much less frequent requests for new in-
formation made by RSUs to the KDC, are modeled on
a needed basis in the macro periods.
The transmission of beacons is modeled by mak-
ing information available to all other VUs, so, when
needed, such information can be read (5). All the
transmissions of a VU are influenced by the previous
data received (3). When the requests made by RSUs
to the KDC have a reply, such reply is received and
stored, and all the effects of the received data on the
simulation are handled by Rx (2).
3.2.3 Task RX: Receive Information
This task has one only phase of execution for VUs: in
the micro period. In this phase we model the reception
of routing beacons and also, in case of RSUs, the re-
ception of messages from the KDC (2). The reception
of beacons is modeled by reading the messages on the
correspondent neighbors at that time (5). The beacons
read from neighbors represent the beacons received in
the last 100 milliseconds, on a FIFO order.
The received information handled in Rx are bea-
cons from others (5) and KDC replies in the case of
RSUs (2). The former may or may not contain signed
messages, that need to be validated with the KDC
public key before being used. Since such validation
is a time consuming operation, we limited its number
in the micro periods (corresponding to 100 millisec-
onds) and delayed to the next micro period the miss-
ing validations. We limited the number of validations
based on tests performed in VUs’ hardware, where
each signature validation has a well defined cost.
The messages are used at this point by VUs to
update their internal state: the received messages are
stored and will influence the future transmissions (3),
and the update of the internal state in VUs will influ-
ence the next visualizations (4).
Based on the received messages we build, update
and compare two routing tables: one based on all the
beacons and another one based on the authenticated
messages.
3.3 Input Data
loop uses as input sets of real traces collected from
each of the VUs in operation. We pre-process the col-
lected information associated to each VU. For the ac-
tive periods of each device, the information present in
the traces is a list of entries containing:
• The timestamp;
• The geographic coordinates;
• The number of neighbors listened;
• The number of neighbors that listen the VU;
• A list of pairs of values from listened neighbors:
identification, signal strength;
• A list of identifications of neighbors that listen to
the VU.
3.4 Visualization
The visualization let us follow the process and eas-
ily understand what is happening at which moment.
Relying on the OpenCV library, a video-like view is
created based on successive images during the emu-
lation, based on the state of VUs. There are two dif-
ferent windows: one with a map showing the state of
VUs, and another one with some temporal parameters
plotted.
The map is associated to the area used by all VUs.
A base image to the visualization area can be initially
loaded, to help the identification of the different areas.
At the beginning, the data of all VUs are loaded
and the base image is populated with the coordinates
of the VUs along the time. These coordinates will
end up showing all the paths used by the VUs (see
Figure 5).
After the loading of the data, the simulation starts,
and a second window appears (see Figure 6). This
window shows the time of the simulation, and the net-
work state regarding to 2 different metrics: the per-
centage of devices that are able to participate in the
loop - A Trace-based Emulator for Vehicular Ad Hoc Networks
397

Figure 5: Loading the data for the emulation. Gray paths
are formed by coordinates used by OBUs.
Figure 6: Parameters plotted during the emulation. The red-
dest parts are closer to 0, while the green ones are closer to
100. The smaller gray bars represent 1 minute of the simu-
lation time, while the bigger ones represent 10 minutes.
secure routing; and the percentage of impact relat-
ing the 2 routing strategies being simulated side by
side (secure and insecure one). Those are the useful
metrics for the analysed scenario and exemplify the
generic capabilities of loop.
During the emulation the map may have multiple
views available, selected with the map command (fol-
low by an identifier of the map) available in loop CLI.
Each view can show a different aspect of the internal
state of devices. In the analysed scenario, RSUs are
always represented by a violet square while the OBUs
are shown as squares of different colors according to
their state. The 2 map views created were:
The big brother view: Shows the active OBUs in 3
possible colors, green, orange and red, according
to the state of their cryptographic material when
compared with the KDC (see Figure 7). In this
view it is possible to analyse the epidemic prop-
agation of the context produced by the KDC and
the impact that RSUs have to the closest OBUs.
The OBUs that have received the last message
produced by the KDC are shown in green. The
other OBUs are shown in orange (if they miss a
”few” messages and can be updated by an OBU)
or red (if they miss a ”great amount” of messages
and can only be updated by RSUs). The outdated
OBUs are highlighted: they are bigger and present
their identification. This helps to diagnose why a
particular OBU is not updated.
The naive view: Shows the active OBUs in 4 possible
Figure 7: Map showing the big brother view. RSUs are
shown in violet. Active OBUs are shown in 3 colors (green,
orange and red) according to the state of their cryptographic
material when compared with KDC.
Figure 8: Map showing the naive view. RSUs are shown
in violet. Active OBUs are shown in 4 colors (black, green,
orange and red) according to the state of their cryptographic
material when compared with their neighbors.
colors, black, green, orange and red, according
to the state of their cryptographic material when
compared with their neighbors (see Figure 8). In
this view it is possible to analyze the evolution
of the relations created between neighbors. The
isolated OBUs, the ones that are not listened nor
listen any other, are shown in black. The OBUs
that listen one or more neighbors all with the cryp-
tographic material in the same state (so they can
produce and validate messages among each other)
are shown in green. The OBUs that are listening
neighbors with cryptographic material in a differ-
ent state are shown in orange or red, if they are the
more or the less updated ones, respectively. Along
with the red OBUs, it is shown a red line con-
necting them to any neighbor that has a more up-
dated cryptographic material. When listening or
listened by neighbors with cryptographic material
in a different state, the OBUs are bigger and show-
ing their identification. This map highlights the
situation where routing beacons may be discarded
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
398

due to discrepancies on the keys being used by
neighbor OBUs.
4 RESULTS
We run loop with 24 hours of traces collected from
the VANET, containing 396 OBUs and 50 RSUs. All
VUs send periodic routing messages (beacons) in in-
tervals of 100 milliseconds, informing all neighbors
about their current routing state. The traces have the
logged state of all nodes in periods of 2 seconds, in-
cluding their geographic position and a list of neigh-
bors listened during the 2 seconds, along with the cor-
respondent beacon signal strength. The area used by
OBUs was about 21.1 by 18.5 kilometers.
Based on the lists of the neighbors per VU, we
simulated the transmission and reception of beacons
in periods of 100 milliseconds. We simulate 2 differ-
ent scenarios side by side: the insecure routing imple-
mented by the base routing protocol, SB2RP (Ameix-
ieira, 2016), and the secure version relying on Trust-
worthy VANET Routing with group authentication
keys (TROPHY) (Cirne et al., 2018). In the secure
version we consider the limitations imposed by the
cryptographic operations in the VUs’ hardware, and
also the connections made by the RSUs to the KDC
and respective content exchanged.
4.1 Test Scenarios
As previously stated, loop was built, at start, to guide
the modification of a routing protocol that was sup-
porting a service in a VANET. To compare the im-
pact of TROPHY with the original insecure routing
strategy, we tested multiple parameters associated to
TROPHY and analyse the differences between them
and between insecure routing.
With the base routing all the messages received
are considered valid messages; this is our reference
since it is the best possible case. With TROPHY VUs
may or may not be able to validate the received rout-
ing beacons from neighbors. One of the purposes of
the evaluation is to analyse the percentage of beacons
that can be validated and its real impact in the routes.
Since TROPHY needs to transmit extra information,
another aspect to analyse is the overhead in terms of
number of larger messages. Besides that, it is im-
portant to evaluate different parameters that can in-
fluence the distribution of the messages produced by
the KDC across the VANET. Finally, the VANET cov-
ers Porto city and its periphery and RSUs are placed
in the center of the city. With TROPHY, we rely on
the epidemic propagation across the VANET of mes-
sages produced by KDC (which only communicate
with RSUs) to update the cryptographic material of
the OBUs moving around the periphery, without forc-
ing them to visit the city center. This epidemic prop-
agation is also an important aspect to analyse.
With loop we evaluated 8 distinct parameters:
1. Percentage of secure messages exchanged consid-
ered valid (according to TROPHY);
2. Percentage of lost routes due to security (assum-
ing routes between OBUs and RSUs with a maxi-
mum of 3 hops, according to the base routing pro-
tocol);
3. Percentage of equivalent routes (same route to
same destination with TROPHY and base rout-
ing);
4. Percentage of secure routes with more hops;
5. Percentage of secure routes with the same number
of hops but using a path with lower quality (based
on Received Signal Strength Indication (RSSI));
6. Total number of messages stored in the active
VUs;
7. Percentage of beacons transmitted with 2 different
types of overhead.
Due to the large extension of the VANET and the
distinct situations that may occur, we also instructed
loop to produce maps where geographical-dependent
parameters are shown. Considering our case, it was
relevant to detect any area of the city where the impact
of the secure strategy would be worst than in the over-
all city. When the parameters associated to TROPHY
were not properly configured, it was possible to see
the different magnitudes of the negative impact asso-
ciated to different areas of the city.
One of the important parameters associated to
TROPHY is the period of the cryptographic material
Figure 9: Percentage of updated OBUs per location while
requesting the update of the cryptographic material in peri-
ods of 10 minutes.
loop - A Trace-based Emulator for Vehicular Ad Hoc Networks
399

18 19 20 21 22 23 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
Hour
70
75
80
85
90
95
100
%
Figure 10: Percentage of routing beacons received and con-
sidered authentic while requesting the update of the cryp-
tographic material in periods of 10 minutes (blue), 1 hour
(orange) and 2 hours (green).
update. To manage the secure routing and to prevent
the cryptanalysis of some of the cryptographic keys,
the cryptographic material used by TROPHY has to
be strategically updated. The updates are initiated by
the KDC and distributed across the VANET based on
an epidemic propagation.
Figure 9 shows the case where the KDC contin-
uously demands the update of the cryptographic ma-
terial of all VUs in periods of 10 minutes. Since 10
minutes is not enough to deliver the information to the
periphery of the city, the cryptographic material the
VANET is not synchronised. As a consequence, the
negative impact in the secure routing is visible in the
periphery of the city. With a periodicity of 2 hours,
such impact is not relevant in any part of the city.
Besides the impact in different areas, updating
the cryptographic material in different periodicity also
has a different impact according to the time of the day.
This impact is shown in Figure 10 for 3 different peri-
ods: 10 minutes, 1 hour and 2 hours. With the video-
like visualization, we are able to go a bit further, and
see the iterations of VUs at a specific time and the
behavior associated to those iterations.
We evaluated different associations of parameters
related to distinct actions with the management of
the cryptographic material in the VANET. Since we
were exploring a strategy to secure a routing protocol,
TROPHY was developed taking in consideration the
need to exclude multiple VUs (detected as compro-
mised). The usefulness of such actions is associated
to their consequences when they are applied to the
VANET, i.e. it would be useless to be able to exclude
VUs if such action was breaking the connectivity for
long periods of time. With loop we were able to sim-
ulate and analyse such actions along the 24 hours pe-
riod. Figure 11 shows the temporal behavior of the
VANET in 2 hypothetical scenarios: the exclusion of
1 VUeach 2 hours, and the exclusionof 16 VUs at once.
18 19 20 21 22 23 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
Hour
85
90
95
100
%
Figure 11: Percentage of routing beacons received and con-
sidered authentic while performing the exclusion of 1 VU
each 2 hours (blue) and the exclusion of 16 VUs at once at
10:00 (orange).
5 CONCLUSION
In this article we presented loop, a trace-based emu-
lator of VANET environments, that uses real data con-
taining the mobility and connectivity patterns of VUs
operating in a VANET. Based on the collected data,
loop emulates the VANET and allows the simulation
of protocol models much faster than wall-clock.
loop takes advantage of an existent VANET and
emulates a reproducible environment where commu-
nication protocols can be simulated in the same con-
ditions without putting in risk the original VANET.
Currently most of the VANET communication
protocols are evaluated based on real environments or
based on mobility and network simulators, with the
latter being the preferable solution.
loop introduces an alternative with considerable
benefits to both cases: it is easy to setup and manage
compared to the tools relying in mobility and network
models, and at the same time it uses realistic informa-
tion in the way of real test-beds.
ACKNOWLEDGEMENTS
This work is funded by FCT/MEC through na-
tional funds under the project, S2MovingCity CMUP-
ERI/TIC/0010/2014.
REFERENCES
Ameixieira, C. (2016). Method and system for operat-
ing a vehicular data network based on a layer-2 peri-
odic frame broadcast, in particular a routing protocol.
WO2016135711A1.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
400

Amit Dua, N. K. (2014). A systematic review on routing
protocols for Vehicular Ad Hoc Networks. Vehicular
Communications, 1(1):33–52.
Bali, R. S., Kumar, N., and Rodrigues, J. J. P. C. (2014).
Clustering in vehicular ad hoc networks: Taxonomy,
challenges and solutions. Vehicular Communications,
1(3):134–152.
Barr, R., Haas, Z. J., and van Renesse, R. (2005). JiST:
An Efficient Approach to Simulation Using Virtual
Machines: Research Articles. Softw. Pract. Exper.,
35(6):539–576.
Buisset, A., Ducourthial, B., Ali, F. E., and Khalfallah, S.
(2010). Vehicular Networks Emulation. In 2010 Pro-
ceedings of 19th International Conference on Com-
puter Communications and Networks, pages 1–7.
Cameron, G., Wylie, B. J. N., and McArthur, D. (1994).
PARAMICS-moving vehicles on the connection ma-
chine. In Proceedings of Supercomputing ’94, pages
291–300.
Choffnes, D. R. and Bustamante, F. E. (2005). An Inte-
grated Mobility and Traffic Model for Vehicular Wire-
less Networks. In Proceedings of the 2Nd ACM In-
ternational Workshop on Vehicular Ad Hoc Networks,
VANET ’05, pages 69–78, New York, NY, USA.
ACM.
Cirne, P., Z
´
uquete, A., and Sargento, S. (2018). TROPHY:
Trustworthy VANET routing with group authentica-
tion keys. Ad Hoc Networks, 71:45–67.
Conceic¸
˜
ao, H., Damas, L., Ferreira, M., and Barros, J.
(2008). Large-scale Simulation of V2v Environments.
In Proceedings of the 2008 ACM Symposium on Ap-
plied Computing, SAC ’08, pages 28–33, New York,
NY, USA. ACM.
Engoulou, R. G., Bella
¨
ıche, M., Pierre, S., and Quintero, A.
(2014). VANET security surveys. Computer Commu-
nications, 44:1–13.
Fall, K. (1999). Network Emulation in the Vint/NS Simu-
lator. In Proceedings of the The Fourth IEEE Sympo-
sium on Computers and Communications, ISCC ’99,
pages 244–, Washington, DC, USA. IEEE Computer
Society.
Fontes, H., Campos, R., and Ricardo, M. (2017). A
Trace-based Ns-3 Simulation Approach for Perpetu-
ating Real-World Experiments. In Proceedings of the
Workshop on Ns-3, WNS3 ’17, pages 118–124, New
York, NY, USA. ACM.
FutureCities Project (2017). Living lab
: Vehicular adhoc networking, url :
http://futurecities.up.pt/site/vehicular-ad-hoc-
networking-testbed.
H
¨
arri, J., Filali, F., Bonnet, C., and Fiore, M. (2006). Vanet-
MobiSim: Generating Realistic Mobility Patterns for
VANETs. In Proceedings of the 3rd International
Workshop on Vehicular Ad Hoc Networks, VANET
’06, pages 96–97, New York, NY, USA. ACM.
Ikeda, M., Kulla, E., Barolli, L., and Takizawa, M. (2011).
Wireless Ad-hoc Networks Performance Evaluation
Using NS-2 and NS-3 Network Simulators. In 2011
International Conference on Complex, Intelligent, and
Software Intensive Systems, pages 40–45.
Krajzewicz, D. (2010). Traffic Simulation with SUMO –
Simulation of Urban Mobility. pages 269–293.
Lim, K. G., Lee, C. H., Chin, R. K. Y., Yeo, K. B., and
Teo, K. T. K. (2016). Simulators for vehicular ad
hoc network (VANET) development. In 2016 IEEE
International Conference on Consumer Electronics-
Asia (ICCE-Asia), pages 1–4.
Mangharam, R., Weller, D., Rajkumar, R., Mudalige, P.,
and Bai, F. (2006). GrooveNet: A Hybrid Simulator
for Vehicle-to-Vehicle Networks. pages 1–8. IEEE.
Noble, B. D., Satyanarayanan, M., Nguyen, G. T., and Katz,
R. H. (1997). Trace-based Mobile Network Emu-
lation. In Proceedings of the ACM SIGCOMM ’97
Conference on Applications, Technologies, Architec-
tures, and Protocols for Computer Communication,
SIGCOMM ’97, pages 51–61, New York, NY, USA.
ACM.
Owen, L. E., Zhang, Y., Rao, L., and McHale, G.
(2000). Traffic flow simulation using CORSIM.
In 2000 Winter Simulation Conference Proceedings
(Cat. No.00CH37165), volume 2, pages 1143–1147
vol.2.
Pal, D. (2012). A Comparative Analysis of Modern Day
Network Simulators. In Wyld, D. C., Zizka, J., and
Nagamalai, D., editors, Advances in Computer Sci-
ence, Engineering & Applications, volume 167, pages
489–498. Springer Berlin Heidelberg, Berlin, Heidel-
berg.
Park, B. and Qi, H. (2006). Microscopic simulation model
calibration and validation for freeway work zone net-
work - a case study of VISSIM. In 2006 IEEE Intelli-
gent Transportation Systems Conference, pages 1471–
1476.
Pessoa, G., Dias, R., Condeixa, T., Azevedo, J., Guardal-
ben, L., and Sargento, S. (2017). New Insights on
Content Distribution Emulation for Vehicular Net-
works.
Pi
´
orkowski, M., Raya, M., Lugo, A. L., Papadimitratos, P.,
Grossglauser, M., and Hubaux, J.-P. (2008). TraNS:
Realistic Joint Traffic and Network Simulator for
VANETs. SIGMOBILE Mob. Comput. Commun. Rev.,
12(1):31–33.
Qu, F., Wu, Z., Wang, F. Y., and Cho, W. (2015). A Security
and Privacy Review of VANETs. IEEE Transactions
on Intelligent Transportation Systems, 16(6):2985–
2996.
Ros, F. J., Martinez, J. A., and Ruiz, P. M. (2014). A
survey on modeling and simulation of vehicular net-
works: Communications, mobility, and tools. Com-
puter Communications, 43:1–15.
Schiller, M. and Knoll, A. (2015). Emulating Vehicular
Ad Hoc Networks for Evaluation and Testing of Au-
tomotive Embedded Systems. In Proceedings of the
8th International Conference on Simulation Tools and
Techniques, SIMUTools ’15, pages 183–190, ICST,
Brussels, Belgium, Belgium. ICST (Institute for Com-
puter Sciences, Social-Informatics and Telecommuni-
cations Engineering).
Sommer, C., Yao, Z., German, R., and Dressler, F. (2008).
On the Need for Bidirectional Coupling of Road Traf-
loop - A Trace-based Emulator for Vehicular Ad Hoc Networks
401

fic Microsimulation and Network Simulation. In Pro-
ceedings of the 1st ACM SIGMOBILE Workshop on
Mobility Models, MobilityModels ’08, pages 41–48,
New York, NY, USA. ACM.
Tan, K., Wu, D., Chan, A., and Mohapatra, P. (2010). Com-
paring simulation tools and experimental testbeds for
wireless mesh networks. In 2010 IEEE International
Symposium on ”A World of Wireless, Mobile and Mul-
timedia Networks” (WoWMoM), pages 1–9.
Uppoor, S., Fiore, M., and H
¨
arri, J. (2013). Synthetic Mo-
bility Traces for Vehicular Networking. In Vehicular
Networks, pages 209–245. John Wiley & Sons, Inc.
Varga, A. and Hornig, R. (2008). An Overview of the OM-
NeT++ Simulation Environment. In Proceedings of
the 1st International Conference on Simulation Tools
and Techniques for Communications, Networks and
Systems & Workshops, Simutools ’08, pages 60:1–
60:10, ICST, Brussels, Belgium, Belgium. ICST (In-
stitute for Computer Sciences, Social-Informatics and
Telecommunications Engineering).
Viriyasitavat, W., Bai, F., and Tonguz, O. K. (2011). Dy-
namics of Network Connectivity in Urban Vehicular
Networks. IEEE Journal on Selected Areas in Com-
munications, 29(3):515–533.
Wang, S., Chou, C., and Lin, C. (2007). The design and
implementation of the NCTUns network simulation
engine. Simulation Modelling Practice and Theory,
15(1):57–81.
Weing
¨
artner, E., Schmidt, F., Lehn, H. V., Heer, T., and
Wehrle, K. (2011). SliceTime: A Platform for Scal-
able and Accurate Network Emulation. In Proceed-
ings of the 8th USENIX Conference on Networked
Systems Design and Implementation, NSDI’11, pages
253–266, Berkeley, CA, USA. USENIX Association.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
402
