
Intellectual Property Protection for Distributed Neural Networks
Towards Confidentiality of Data, Model, and Inference
Laurent Gomez
1
, Alberto Ibarrondo
1
, José Márquez
1
and Patrick Duverger
2
1
SAP Security Research, 805, Avenue Dr. Maurice Donat, 06250 Sophia-Antipolis, France
2
City of Antibes Juan-les-Pins, France
Keywords:
Intellectual Property Protection, Fully Homomorphic Encryption, Neural Networks, Distributed Landscapes,
Smart Cities.
Abstract:
Capitalizing on recent advances on HPC, GPUs, GPGPUs along with the rising amounts of publicly available
labeled data; (Deep) Neural Networks (NN) have and will revolutionize virtually every current application
domain as well as enable novel ones such as those on recognition, autonomous, predictive, resilient, self-
managed, adaptive, and evolving applications. Nevertheless, it is to point out that NN training is rather re-
source intensive in data, time and energy; turning the resulting trained models into valuable assets representing
an Intellectual Property (IP) imperatively worth of being protected. Furthermore, in the wake of Edge compu-
ting, NNs are being progressively deployed across decentralized landscapes; as a consequence, IP owners take
very seriously the protection of their NN based software products. In this paper we propose to leverage Fully
Homomorphic Encryption (FHE) to protect simultaneously the IP of trained NN based software, as well as the
input data and inferences. Within the context of a smart city scenario, we outline our NN model-agnostic ap-
proach, approximating and decomposing the NN operations into linearized transformations while employing
a Single Instruction Multiple Data (SIMD) for vectorizing operations.
NOMENCLATURE
v,v,V Scalar, Vector, Matrix/Tensor
h
t
i
pub
Tensor t encrypted with key pub
1 INTRODUCTION
1.1 Motivation
Mimicking human’s cortex, Neural Networks (NN)
enable computers to learn through training. With the
recent progress on GPU based computing capabili-
ties, NN have received major improvements such as
Convolutional Layers (Krizhevsky et al., 2012), Batch
Normalization (Ioffe and Szegedy, 2015) or Residual
Blocks (He et al., 2016). As part of the Deep Learning
(DL) (Goodfellow et al., 2016) field, DNN have revo-
lutionized the creation of software based applications
for problems with a non-deterministic solution space
(e.g. object detection, facial recognition, autonomous
driving, video processing, among others).
But GPUs hardware, and labeled data sets come
at a cost. In addition, NN training is data, time and
energy-intensive. This makes the outcome of DL trai-
ning very valuable: the topology, the number and type
of hidden layers including design characteristics (de-
fined before training); and specially the model, the
values of all the parameters in the trained network.
Furthermore, with the rise of edge computing and
Internet of Things (IoT), NN are meant to be deployed
outside of corporate boundaries, closer to customer
business and in potentially insecure environments. In-
dustrial actors take very seriously the Intellectual Pro-
perty (IP) protection of trained DNN. This new para-
digm calls for solutions to protect IP of distributed DL
inference processing systems, with DNN deployment
and execution on decentralized systems.
The lack of solutions for IP protection exposes
trained NN owners to reverse engineering on their DL
models (Tramèr et al., 2016). As outlined in (Augasta
and Kathirvalavakumar, 2012) (Floares, 2008), attac-
kers can steal trained NN models. In such new co-
ding paradigm, where design patterns are enforced in
known and legacy implementations, the question of
IP is at stake. The question is not so much how to
protect the DNN architecture (since most architectu-
res are grounded on well known research), but rather
how to protect the trained DNN model.
Gomez, L., Ibarrondo, A., Márquez, J. and Duverger, P.
Intellectual Property Protection for Distributed Neural Networks - Towards Confidentiality of Data, Model, and Inference.
DOI: 10.5220/0006854701470154
In Proceedings of the 15th International Joint Conference on e-Business and Telecommunications (ICETE 2018) - Volume 2: SECRYPT, pages 147-154
ISBN: 978-989-758-319-3
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
147
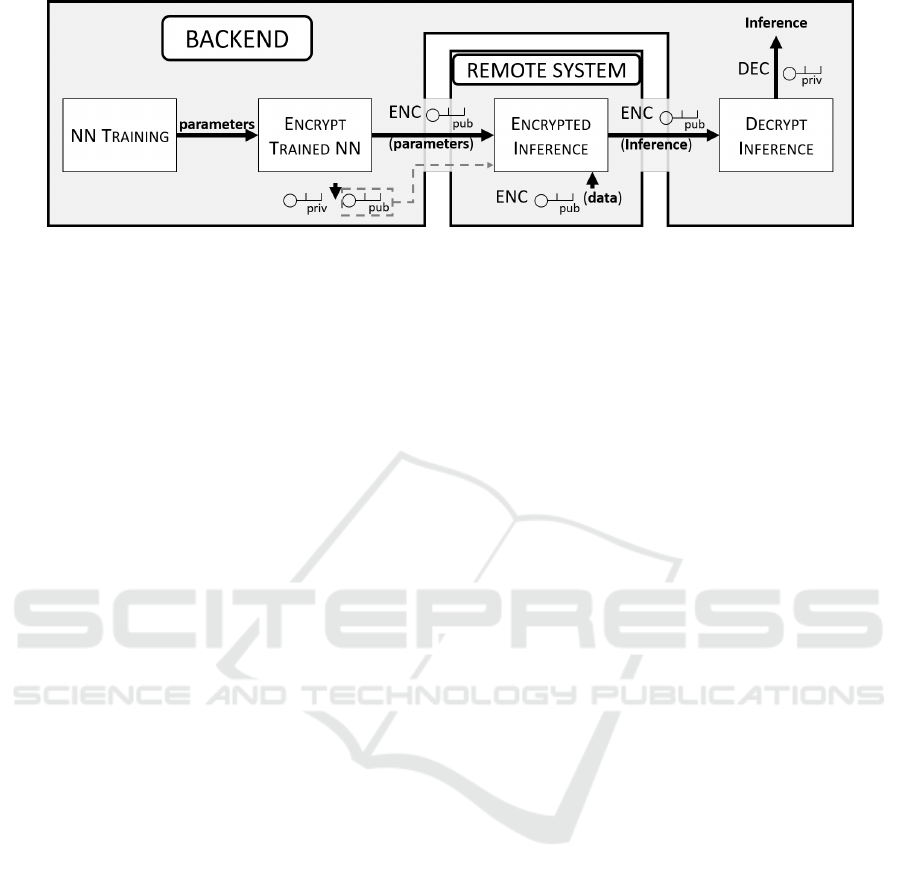
Figure 1: Diagram of IP protection solution.
1.2 State of the Art
Applying security to (Deep) Neural Networks is a
current research topic sought using mainly two diffe-
rent techniques: variants of Fully Homomorphic En-
cryption/FHE (Gentry, 2009) and Secure Mupti-party
Computation/SMC (Cramer et al., 2015). While FHE
techniques allow encrypted addition and multiplica-
tion in a single machine, SMC employs gated circuits
to perform arithmetic operations on shared data across
several communicating machines. With these techni-
ques at hand, NN protection is pursued for two main
phases: training and classification/inference.
Secure NN training has been tackled using FHE
(Graepel et al., 2012) and SMC (Shokri and Shmati-
kov, 2015), disregarding protection once the trained
model is to be deployed and used. Other Machine Le-
arning models such as linear and logistic regressions
have also been trained in a secure way in (Mohassel
and Zhang, 2017).
Regarding classification, SMC has led to coopera-
tive solutions where several devices work together to
obtain federated inferences (Liu et al., 2017), not sup-
porting deployment of the trained NN to trusted de-
centralized systems. Inference using FHE encrypted
data was covered in cryptonets (Gilad-Bachrach et al.,
2016), improved in (Chabanne et al., 2017) and (He-
samifard et al., 2017). While preventing disclosure
of data at inference phase, the security of the model
itself is out of their scope.
So far, the only research addressing IP protection
of NNs used watermarking (Uchida et al., 2017).
Even though this technique can detect infringement,
it cannot be prevented, thus failing to preserve confi-
dentiality neither on the input data, inference nor on
the NN model.
Regarding IP protection of the NN, the problem
has been only addressed using watermarking (Uchida
et al., 2017). In this case, even though infringement
can be detected, without preventing it, no confidenti-
ality preserving solution is elaborated neither on the
input data, inference nor on the NN model.
To the best of our knowledge, no other publication
has tackled protection of both trained NN models and
data on decentralized and untrusted systems.
1.3 Proposed Solution
In this paper we propose a solution to protect both
the IP of trained NN, input data and output infe-
rence, leveraging on FHE. Once trained, the parame-
ters of the trained NN model are encrypted homomor-
phically. The resulting encrypted NN can be deployed
on potentially insecure decentralized systems, while
preserving the trained NN model and mitigating risk
of reverse engineering. Inference can still be carried
out over the homomorphically encrypted DNN, inser-
ting homomorphically encrypted data and producing
homomorphically encrypted predictions. Confidenti-
ality of both trained NN, input data and inference re-
sults are therefore guaranteed.
This paper is organized as follows: section 2 pro-
vides an overview of our solution and the use case.
Section 3 details the fundamentals of our approach.
In section 4, we present the architecture and proces-
ses, concluding with future steps in section 5.
2 NEURAL NETWORK
INTELLECTUAL PROPERTY
PROTECTION SYSTEM
2.1 Overview
Our system is structured in 4 blocks (Figure 1):
1. NN Training: during this phase, unencrypted
data is used to train the NN. Alternatively, we can
import an already trained NN.
2. Encryption of Trained NN: once trained, the NN
is protected, encrypting all parameters comprised
in the model.
SECRYPT 2018 - International Conference on Security and Cryptography
148

3. Inference on Decentralized Systems: the en-
crypted NN can be deployed on decentralized sy-
stems for DL inference, protecting its IP .
4. Inference Decryption: an encrypted NN produ-
ces encrypted inference, to be decrypted only by
the owner of the trained NN.
2.2 Use Case
In this paper, we illustrate our approach with video
surveillance use case for risk prevention in pu-
blic spaces. Nowadays, cities are equipped with vi-
deo surveillance infrastructure, where video stream
is manually monitored and analyzed by police offi-
cers. This is time-consuming, costly and with que-
stionable efficiency, thus cameras end up being used
a posteriori to review incident. Indeed, smart cities
rely on video-protection infrastructure to improve se-
cure early detection of incidents in public spaces (e.g.,
early detection of terrorist attacks, abnormal crowd
movement). By empowering cameras with deep le-
arning capabilities on the edge, cameras evolve into
multi-function sensors. Pushing the computation to
where the data is being obtained substantially reduces
communication overhead. This way, cameras can pro-
vide analytics and feedback, shifting towards a smart
city cockpit.
With such approach, video management shifts
from sole protection to versatile monitoring. These
cameras has not only a simple - but essential - secu-
rity role. It can also measure in real time the pulse of
the agglomeration throughout vehicle flows and pe-
ople who use them to redefine mobility, reduce public
lighting costs, smooth traffic flow, etc.
3 FUNDAMENTALS OF IP
PROTECTION
3.1 Homomorphic Encryption
While preserving data privacy, Homomorphic En-
cryption (HE) schemes allow certain computations
on encrypted data without revealing neither its in-
puts nor its internal states. (Gentry, 2009) first
proposed a Fully Homomorphic Encryption (FHE)
scheme, which theoretically could compute any kind
of function, but it was computationally intractable.
FHE evolved into more efficient techniques
like Somewhat/Leveled Homomorphic Encryption
SHE/LHE, which preserve both addition and multi-
plication over encrypted data. Similar to asymmetric
encryption, during KeyGen a public key (pub) is ge-
nerated for encryption, and a private key (priv), for
decryption. Encrypted operations hold:
Enc
pub
(a ∗x + b) ≡
h
a ∗x + b
i
pub
=
h
a ∗x
i
pub
+
h
b
i
pub
=
h
a
i
pub
∗
h
x
i
pub
+
h
b
i
pub
(1)
Modern implementations such as HELib (Halevi and
Shoup, 2014) or SEAL (Laine and Player, 2016) in-
clude Single Instruction Multiple Data (SIMD), allo-
wing multiple data to be stored in a single ciphertext
and vectorizing operations. Hence, FHE protection
implies vectorized additions and multiplications.
3.2 Data Encryption
The data encryption mechanism depends on the cho-
sen scheme, the most efficient being BGV (Brakerski
et al., 2011) and FV (Fan and Vercauteren, 2012). The
encryption process is computationally slow, hence it
can generate a bottleneck for the whole system, ha-
ving a negative impact on overall performance.
X
encryption
−−−−−−→ ENC
pub
(X) =
h
X
i
pub
(2)
3.3 Protecting Deep Neural Networks
Multiple architectures of deep neural networks have
been designed addressing various domains. Our ap-
proach for IP protection is agnostic about the archi-
tecture of the Deep Neural Network. Nonetheless,
in this paper we employ Deep Convolutional Neural
Networks (DCNN), appropriate for video processing.
A DNN with L layers is composed of:
1. An input layer, the tensor of input data X
2. L −1 hidden layers, mathematical computations
transforming X somewhat sequentially.
3. An output layer, the tensor of output data Y.
We denote the output of layer i as a tensor A
[i]
,
with A
[0]
= X,and A
[L]
= Y . Tensors can have diffe-
rent sizes and even different number of dimensions.
Layers inside a NN can be categorized as:
• Linear: they only involve polynomial operati-
ons, and can be seamlessly protected using FHE,
such as Fully Connected layer (FC), Convolutio-
nal layer (Conv), residual blocks, and mean pool-
ing.
• Non-linear, they include other operations (max,
exp, division), and must be converted into sums
and multiplications. E.g.: Activation Functions,
Batch Normalization, max pooling...
Intellectual Property Protection for Distributed Neural Networks - Towards Confidentiality of Data, Model, and Inference
149
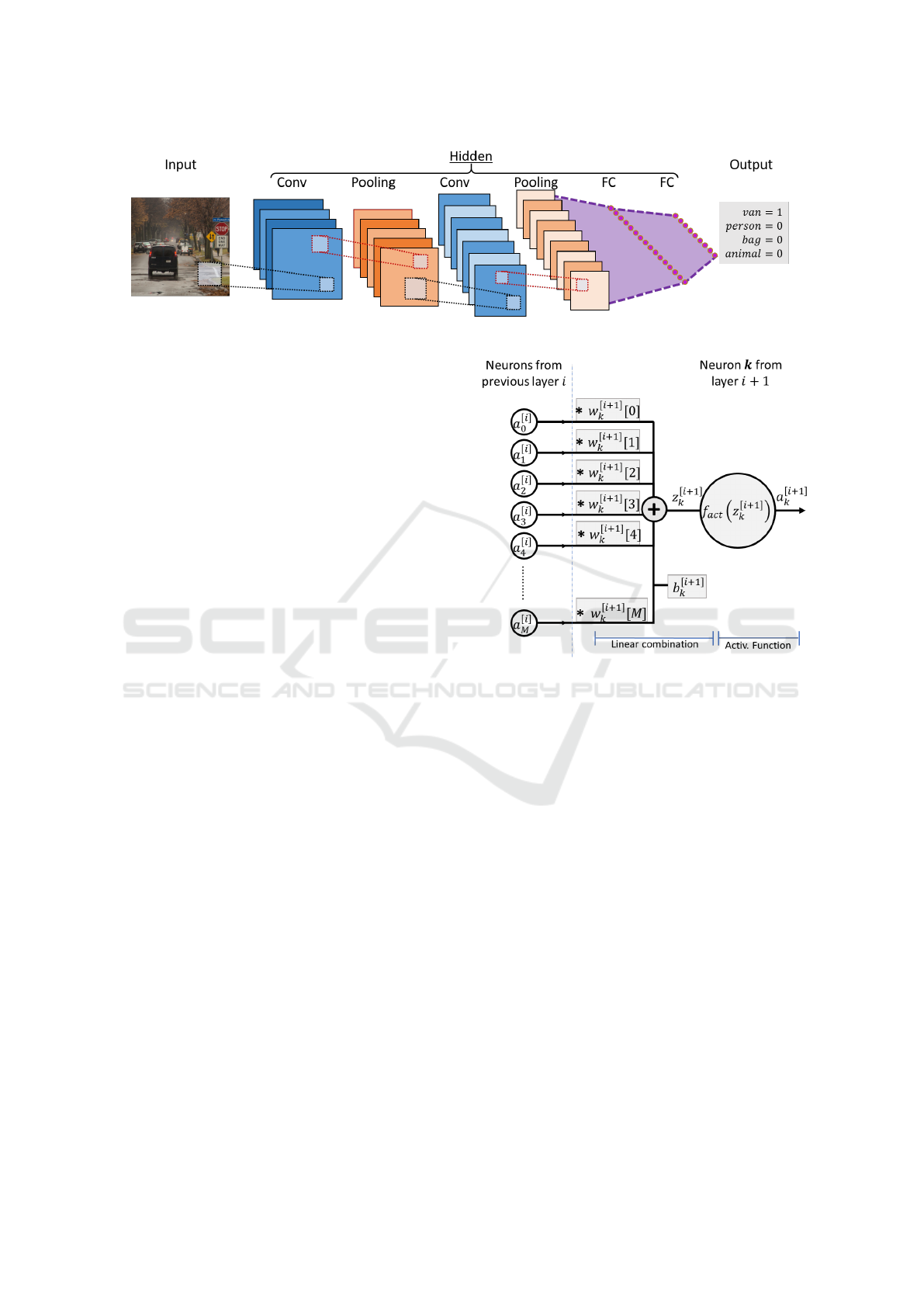
Figure 2: Example of architecture in a Deep Convolutional Neural Network.
Selecting a DNN architecture involves choosing:
the number, types, order and size of the layers. An
example of DCNN architecture is shown in Figure 2:
[Conv → Pool]
n
→ [FC]
m
Generally, DNN are designed mimicking well known
architectures such as LeNet (LeCun et al., 2015),
VGGNet(Simonyan and Zisserman, 2014) or ResNet
(He et al., 2016), de-facto standards for object recog-
nition and image classification.
In pursuance of full protection fors any given
DNN, each layer needs to protect its underlying ope-
rations.
3.3.1 Fully Connected Layer (FC)
Also known as Dense Layer, it is composed of N pa-
rallel neurons, performing a R
1
→ R
1
transformation
(Figure 3). We will define:
a
[i]
=
h
a
[i]
0
...a
[i]
k
...a
[i]
N
i
T
as the output of layer i;
z
[i]
=
h
z
[i]
0
...z
[i]
k
...z
[i]
N
i
T
as the linear output of layer i;
(z
[i]
= a
[i]
if there is no activation function)
b
[i]
=
h
b
[i]
0
...b
[i]
k
...b
[i]
N
i
T
as the bias of layer i;
W
[i]
=
h
w
[i]
0
...w
[i]
k
...w
[i]
N
i
T
as the weights of layer i.
Neuron k performs a linear combination of the
output of the previous layer a
[i−1]
multiplied by the
weight vector w
[i]
k
and shifted with a bias scalar b
[i]
k
,
obtaining the linear combination z
[i]
k
:
z
[i]
k
=
M
∑
l=0
w
[i]
k
[l] ∗a
[i−1]
l
!
+ b
[i]
k
= w
[i]
k
∗a
[i−1]
+ b
[i]
k
(3)
Vectorizing the operations for all the neurons in layer
i we obtain the dense layer transformation:
z
[i]
= W
[i]
∗a
[i−1]
+ b
[i]
(4)
Figure 3: FC with activation for neuron k.
Protecting FC Layer. Since FC is a linear layer,
it can be directly computed in the encrypted domain
using additions and multiplications. Vectorization is
achieved straightforwardly:
D
z
[i]
E
pub
≡
D
W
[i]
∗a
[i−1]
+ b
[i]
E
pub
=
D
W
[i]
E
pub
∗
D
a
[i−1]
E
pub
+
D
b
[i]
E
pub
(5)
3.3.2 Activation Function
Activation functions are the major source of non-
linearity in DNNs. They are performed element-wise
(R
0
→R
0
, thus easily vectorized), and generally loca-
ted after linear transformations (FC, Conv). All acti-
vation functions are positive monotonic.
a
[i]
k
= f
act
z
[i]
k
(6)
• Rectifier Linear Unit (ReLU) is currently consi-
dered as the most efficient activation function for
DL. Several variants have been proposed, such
as Leaky ReLU(Maas et al., 2013), ELU(Clevert
SECRYPT 2018 - International Conference on Security and Cryptography
150
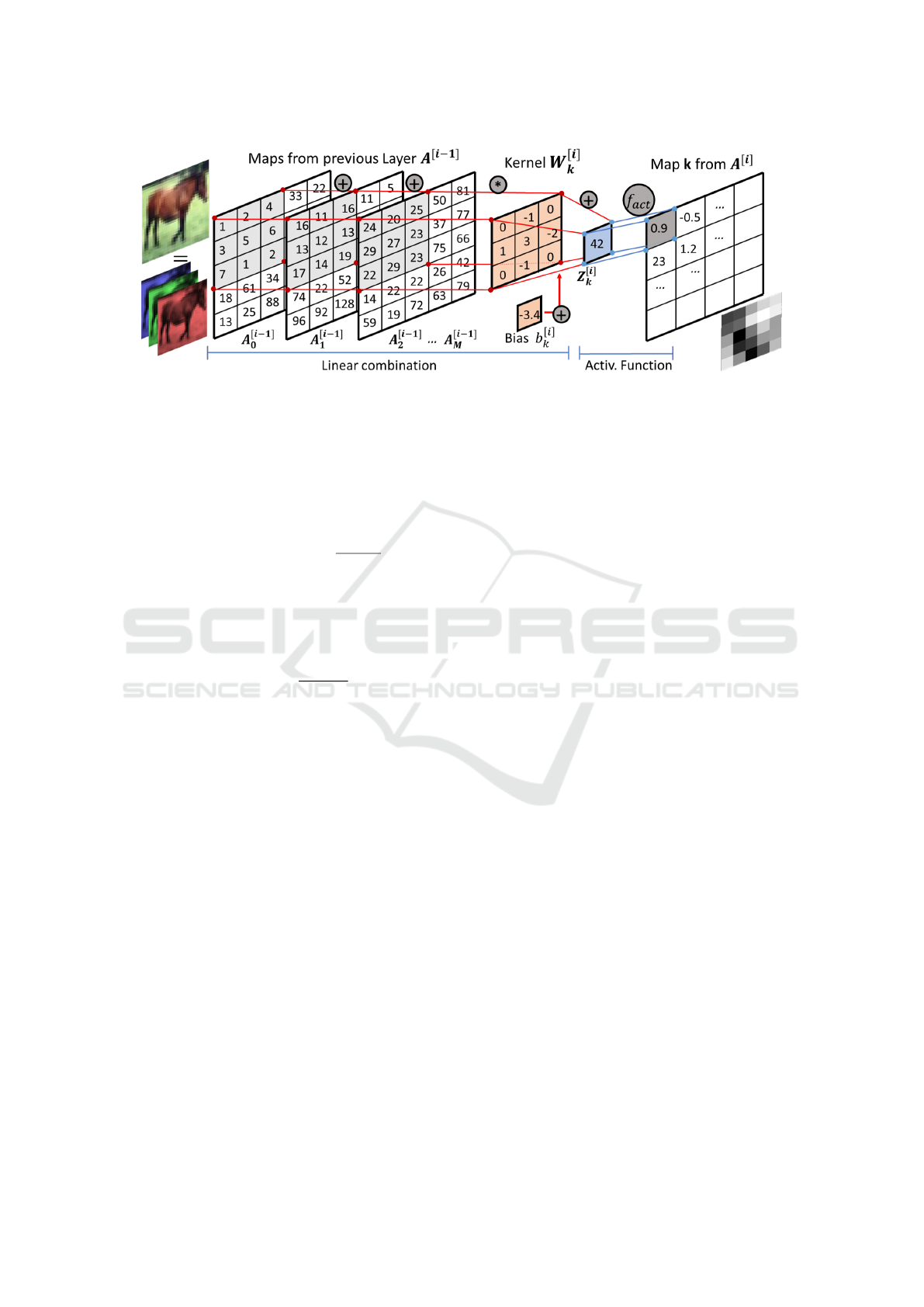
Figure 4: Conv layer with activation for map k.
et al., 2015) or its differentiable version Softplus.
ReLU (z) = z
+
= max(0,z)
So f t plus(z) = log(e
z
+ 1)
(7)
• Sigmoid σ The classical activation function. Its
efficiency has been debated in the DL community.
Sigmoid(z) = σ(z) =
1
1 + e
−z
(8)
• Hyperbolic Tangent (tanh) is currently being used
in the industry because it is easier to train than
ReLU: it avoids having any inactive neurons and
it keeps the sign of the input.
tanh(z) =
e
z
−e
−z
e
z
+ e
−z
(9)
Protecting Activation Functions. Due to its in-
nate non-linearity, they need to be approximated with
polynomials. (Gilad-Bachrach et al., 2016) propo-
sed using only σ(z) approximating it with a square
function. (Chabanne et al., 2017) used Taylor poly-
nomials around x = 0, studying performance based on
the polynomial degree. (Hesamifard et al., 2017) ap-
proximate instead the derivative of the function and
then integrate to obtain their approximation. One al-
ternative would be to use Chebyshev polynomials.
3.3.3 Convolutional Layer (Conv)
Conv layers constitute a key improvement for image
recognition and classification using NNs. The R
2|3
→
R
2|3
linear transformation involved is spatial convo-
lution, where a 2D s ∗s filter (a.k.a. kernel) is multi-
plied to the 2D input image in subsets (patches) with
size s ∗s and in defined steps (strides), then added up
and then shifted by a bias (see Figure 4). For input
data with several channels or maps (e.g.: RGB counts
as 3 channels), the filter is applied to the same patch
of each map and then added up into a single value of
the output image (cumulative sum across maps). A
map in Conv layers is the equivalent of a neuron in
FC layers. We define:
A
[i]
k
as the map k of layer i;
Z
[i]
k
as the linear output of map k of layer i;
(Z
[i]
k
= A
[i]
k
in absence of activation function)
b
[i]
k
as the bias value for map k in layer i
W
[i]
k
as the s ∗s filter/kernel for map k.
This operation can be vectorized by smartly repli-
cating data (Ren and Xu, 2015). The linear transfor-
mation can be expressed as:
Z
[i]
k
=
M maps
∑
m=0
A
[i−1]
m
⊕W
[i]
k
!
+ b
[i]
k
(10)
Protecting Convolutional Layers. Convolution
operation can be decomposed in a series of vectorized
sums and multiplications over patches of size s ∗s. :
D
Z
[i]
k
E
pub
=
*
M maps
∑
m=0
A
[i−1]
m
⊕W
[i]
k
!
+ b
[i]
k
+
pub
=
M maps
∑
m=0
D
A
[i−1]
m
⊕W
[i]
k
E
pub
+
D
b
[i]
k
E
pub
=
(
M
∑
m=0
D
A
[i−1]
m
[ j]
E
pub
∗
D
W
[i]
k
E
pub
)
[s∗s]
+
D
b
[i]
k
E
pub
(11)
3.3.4 Pooling Layer
This layer reduces the input size by using a packing
function. Most commonly used functions are max
and mean. Similarly to convolutional layers, pooling
layers apply their packing function to patches (sub-
sets) of the image with size s ∗s at strides(steps) of a
defined number of pixels, as depicted in Figure 5.
Intellectual Property Protection for Distributed Neural Networks - Towards Confidentiality of Data, Model, and Inference
151
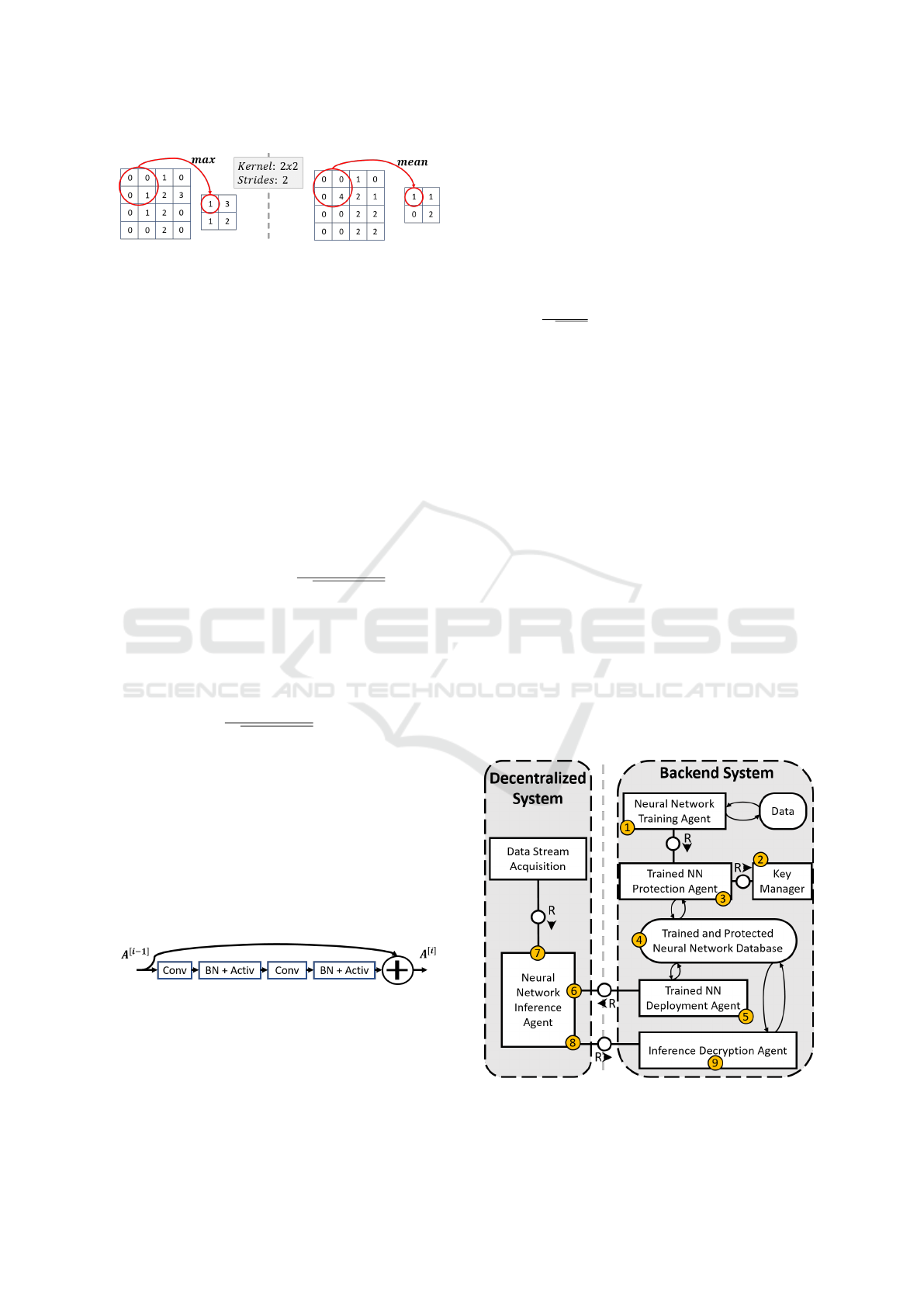
Figure 5: Max and Mean packing for Pooling layers.
Protecting Pooling Layer. Max can be approxima-
ted by the sum of all the values in each patch of
size s ∗s, which is equivalent to scaled mean pooling.
Mean pooling can be scaled (sum of values) or stan-
dard (multiplying by 1/N). By employing a flattened
input, pooling becomes easily vectorized.
3.3.5 Other Techniques
• Batch Normalization (BN) reduces of the range
of input values by ’normalizing’ across data bat-
ches: subtracting mean and dividing by standard
deviation. BN also allows finer tuning using trai-
ned parameters β and γ (ε is a small constant used
for numerical stability).
a
[i+1]
k
= BN
γ,β
(a
[i]
k
) = γ∗
a
[i]
k
−E[a
[i]
k
]
q
Var[a
[i]
k
] + ε
+β (12)
Protection of BN is achieved by treating division
as the inverse of a multiplication.
D
a
[i+1]
k
E
pub
=
h
γ
i
pub
∗
D
a
[i]
k
E
pub
−
D
E[a
[i]
k
]
E
pub
∗
*
1
q
Var[a
[i]
k
] + ε
+
pub
+
h
β
i
pub
(13)
• Dropout and Data Augmentation only affect
training procedure. They don’t require protection.
• Residual Block is an aggregation of layers where
the input is added unaltered at the end of the
block, thus allowing the layers to learn incremen-
tal (’residual’) modifications (Figure 6).
A
[i]
= A
[i−1]
+ ResBlock
A
[i−1]
(14)
Figure 6: Example of a possible Residual Block.
Protection of ResBlock is achieved by protecting
the sum and the layers inside ResBlock:
D
A
[i]
E
pub
=
D
A
[i−1]
E
pub
+
D
ResBlock
A
[i−1]
E
pub
(15)
3.4 Model Training and Outcome
Training is data and computationally intensive, per-
formed by means of a backpropagation algorithm to
gradually optimize the network loss function. It is
also possible to reuse a previously trained model and
apply fine tuning. As a result you get a trained model:
• Weights W and biases b in FC and Conv layers.
• E[A],
1
√
Var[A]
, β and γ parameters in BN.
Those constitute the secrets to be kept when de-
ploying a NN to decentralized systems. We focus so-
lely on protecting IP of the model, leaving protection
of the architecture out of the scope of this paper.
3.5 Inference Decryption
The decryption of the last layer’s output Y is simply
performed utilizing the private encryption key, as in
standard asymmetric encryption schemes:
D
A
[L]
E
pub
decryption
−−−−−−→ DEC
priv
D
A
[L]
E
pub
= Y
(16)
4 ARCHITECTURE
In this section we outline the architecture and infor-
mation flows in our IP protection system, whose de-
composition can be seen in Figure 7.
Figure 7: Activity Diagram in our solution.
SECRYPT 2018 - International Conference on Security and Cryptography
152
Encryption of Trained NN 1 2 3 4
In the backend, a NN is trained within a NN Training
Agent. The outcome of the training (NN architecture
and parameters) is pushed to the Trained NN Pro-
tection Agent. Alternatively, an already trained NN
can be imported directly into the Protection Agent.
The NN Protection Agent generates a Fully Ho-
momorphic key pair from the Key Generator compo-
nent. The DNN is then encrypted and stored toget-
her with its homomorphic key pair in the Trained and
Protected NN Database.
Deployment of Trained and Protected NN 5
At the deployment phase, the Trained NN Deployment
Agent deploys the NN on decentralized systems, to-
gether with its public key.
NN Inference Processing 6 7 8 9
On the decentralized system, data is collected by a
Data Stream Acquisition component, and forwarded
to the NN Inference Agent. Encrypted inferences are
sent to the Inference Decryption Agent for their de-
cryption using the private key associated to the NN.
IP of the NN, together with the computed inferen-
ces, is protected from any disclosure on the decentra-
lized system throughout the entire process.
4.1 Sequential Processes
4.1.1 Encryption of Trained NN
Once a Neural Network is trained or imported, we en-
crypt all its parameters, using the Protected NN Da-
taBase to store it and handle Homomorphic Keys (Fi-
gure 8).
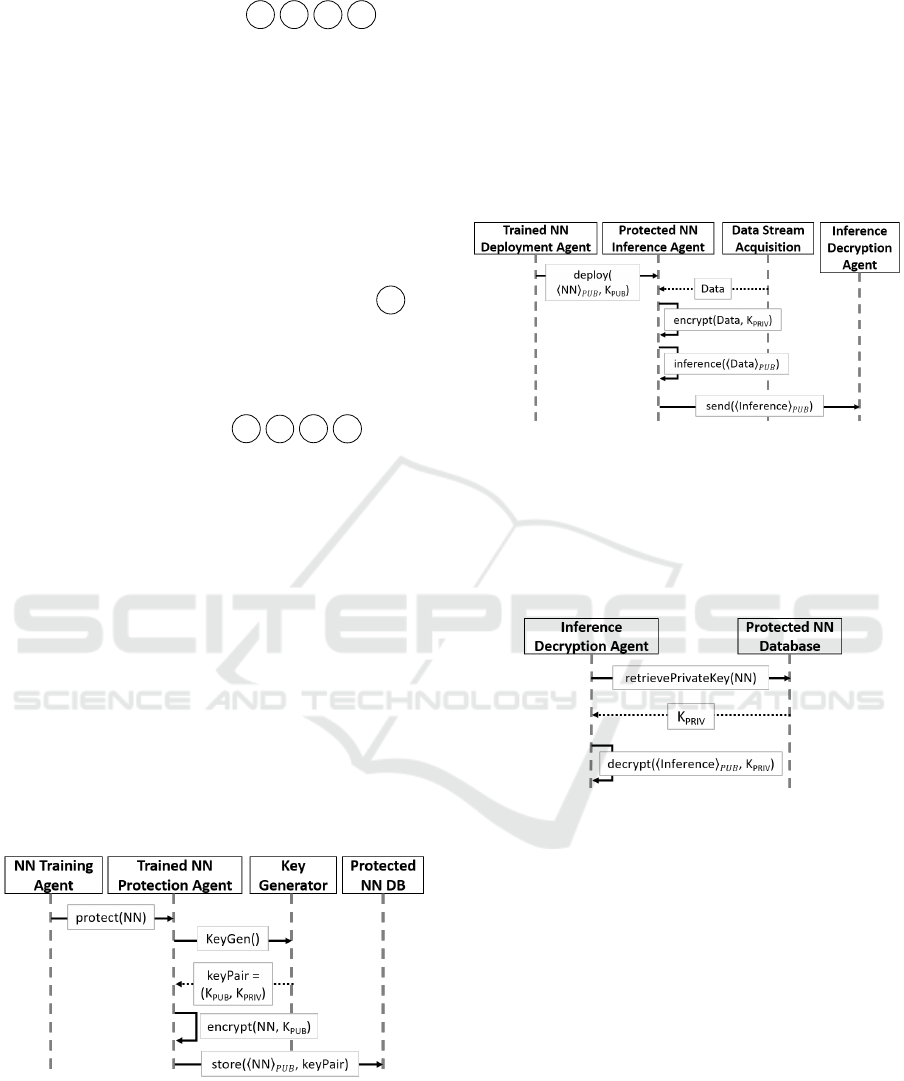
Figure 8: Sequence diagram of Trained NN Encryption.
4.1.2 Deploy Trained and Protected NN
The newly trained and protected deep neural network
is deployed on the decentralized systems, including:
1. Network architecture;
2. Network model: Encrypted parameters;
3. Public encryption key.
4.1.3 Encrypted Inference
On the decentralized system, data is collected and in-
jected into the deployed NN. We must encrypt A
[0]
=
X with the public encryption key associated to the de-
ployed NN (Figure 9).
Figure 9: Sequence diagram of inference processing.
4.1.4 Inference Decryption
Encrypted inferences are sent to backend, together
with an identifier of the NN used for the inference.
The inference is homomorphically decrypted using
the mapping private decryption key (Figure 10).
Figure 10: Sequence diagram of inference decryption.
5 CONCLUSION
This paper elaborates on a solution for the protection
of Intellectual Property of decentralized Deep Neu-
ral Networks. Leveraging on Fully Homomorphic
Encryption, we encrypt trained DNN, while preser-
ving the confidentiality of input data and resulting
inferences. This approach requires the modification
of DNN to use linear approximation of activations
functions, together with the decomposition of all ope-
rations into sums and multiplications, and encryption
of input data at inference phase.
As future work, we will evaluate our approach on
a real smart city use case. Overall performance of the
system will be studied and compared with its unen-
crypted version. In that context, we consider the im-
pact of all operations performed on the backend as
Intellectual Property Protection for Distributed Neural Networks - Towards Confidentiality of Data, Model, and Inference
153

negligible, including encryption of DNN, or decryp-
tion of inferences. Nevertheless, considering the re-
source restriction on decentralized systems, encryp-
tion of input data as well as encrypted computations
are expected to have a major impact on the perfor-
mance of the overall system.
REFERENCES
Augasta, M. G. and Kathirvalavakumar, T. (2012). Reverse
engineering the neural networks for rule extraction
in classification problems. Neural processing letters,
35(2):131–150.
Brakerski, Z., Gentry, C., and Vaikuntanathan, V. (2011).
Fully homomorphic encryption without bootstrap-
ping. Cryptology ePrint Archive, Report 2011/277.
Chabanne, H., de Wargny, A., Milgram, J., Morel, C., and
Prouff, E. (2017). Privacy-preserving classification
on deep neural network. IACR Cryptology ePrint Ar-
chive, 2017:35.
Clevert, D.-A., Unterthiner, T., and Hochreiter, S.
(2015). Fast and accurate deep network learning
by exponential linear units (elus). arXiv preprint
arXiv:1511.07289.
Cramer, R., Damgård, I. B., et al. (2015). Secure multiparty
computation. Cambridge University Press.
Fan, J. and Vercauteren, F. (2012). Somewhat practical fully
homomorphic encryption. Cryptology ePrint Archive,
Report 2012/144.
Floares, A. G. (2008). A reverse engineering algorithm
for neural networks, applied to the subthalamopalli-
dal network of basal ganglia. Neural Networks, 21(2-
3):379–386.
Gentry, C. (2009). A fully homomorphic encryption scheme.
Stanford University.
Gilad-Bachrach, R., Dowlin, N., Laine, K., Lauter, K., Na-
ehrig, M., and Wernsing, J. (2016). Cryptonets: Ap-
plying neural networks to encrypted data with high
throughput and accuracy. In International Conference
on Machine Learning, pages 201–210.
Goodfellow, I., Bengio, Y., Courville, A., and Bengio, Y.
(2016). Deep learning, volume 1. MIT press Cam-
bridge.
Graepel, T., Lauter, K., and Naehrig, M. (2012). Ml con-
fidential: Machine learning on encrypted data. In In-
ternational Conference on Information Security and
Cryptology, pages 1–21. Springer.
Halevi, S. and Shoup, V. (2014). Algorithms in helib. In
International cryptology conference, pages 554–571.
Springer.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resi-
dual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hesamifard, E., Takabi, H., and Ghasemi, M. (2017).
Cryptodl: Deep neural networks over encrypted data.
CoRR, abs/1711.05189.
Ioffe, S. and Szegedy, C. (2015). Batch normalization:
Accelerating deep network training by reducing inter-
nal covariate shift. In International conference on ma-
chine learning, pages 448–456.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in neural information pro-
cessing systems, pages 1097–1105.
Laine, K. and Player, R. (2016). Simple encrypted arithme-
tic library-seal (v2. 0). Technical report, Technical re-
port, September.
LeCun, Y. et al. (2015). Lenet-5, convolutional neural
networks. URL: http://yann. lecun. com/exdb/lenet,
page 20.
Liu, J., Juuti, M., Lu, Y., and Asokan, N. (2017). Oblivious
neural network predictions via minionn transformati-
ons. In Proceedings of the 2017 ACM SIGSAC Con-
ference on Computer and Communications Security,
pages 619–631. ACM.
Maas, A. L., Hannun, A. Y., and Ng, A. Y. (2013). Rectifier
nonlinearities improve neural network acoustic mo-
dels. In Proc. icml, volume 30, page 3.
Mohassel, P. and Zhang, Y. (2017). Secureml: A system
for scalable privacy-preserving machine learning. In
Security and Privacy (SP), 2017 IEEE Symposium on,
pages 19–38. IEEE.
Ren, J. S. and Xu, L. (2015). On vectorization of deep con-
volutional neural networks for vision tasks. In AAAI,
pages 1840–1846.
Shokri, R. and Shmatikov, V. (2015). Privacy-preserving
deep learning. In Proceedings of the 22nd ACM SIG-
SAC conference on computer and communications se-
curity, pages 1310–1321. ACM.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Tramèr, F., Zhang, F., Juels, A., Reiter, M. K., and Risten-
part, T. (2016). Stealing machine learning models via
prediction apis. In USENIX Security Symposium, pa-
ges 601–618.
Uchida, Y., Nagai, Y., Sakazawa, S., and Satoh, S. (2017).
Embedding watermarks into deep neural networks. In
Proceedings of the 2017 ACM on International Confe-
rence on Multimedia Retrieval, pages 269–277. ACM.
SECRYPT 2018 - International Conference on Security and Cryptography
154
