
Energy Efficient On-Sensor Processing for Online Activity Recognition
Florian Gr
¨
utzmacher
1
, Albert Hein
1
, Benjamin Beichler
1
, Polichronis Lepidis
2
, Rainer Dorsch
2
,
Thomas Kirste
1
and Christian Haubelt
1
1
University of Rostock, 18051 Rostock, Germany
2
Bosch Sensortec GmbH, Gerhard-Kindler-Straße 9, 72770 Reutlingen, Germany
Keywords:
Energy Efficiency, Wearable Sensors, Activity Recognition, Energy Trade-Off, On-Sensor Computations.
Abstract:
In sensor-based online activity recognition, the communication of sensor samples at high data rates has a
great impact on the energy consumptions of wearables. In our work we investigate the idea of calculating
data reducing stages of activity recognition systems on wireless sensor nodes in order to reduce the amount
of transmitted data and thus the overall energy consumption. In our experiments, this approach could reduce
the energy consumption of a wireless sensor node by up to 27%. Since the benefit of this approach highly
depends on design parameters of the activity recognition, we introduce an energy trade-off model for wireless
sensor nodes to estimate energy-savings of application specific configurations at design time. By calibrating
this model for our wireless sensor node, we could achieve an accuracy of more than 99% in our experiments.
1 INTRODUCTION
Online Activity Recognition with wearables has
gained increasingly importance, especially in the do-
mains healthcare, e-health, and ambient assisted liv-
ing (AAL). Usually, activity recognition is done in
multiple consecutive stages, which are known as the
Activity Recognition Chain (ARC) like introduced by
Bulling et al. in (Bulling et al., 2014). This chain
is composed of the stages data acquisition, prepro-
cessing, segmentation, feature extraction, and finally,
classification. For a more detailed description we re-
fer to (Bulling et al., 2014).
Common setups involve wearable sensors from
which raw data is sent via wireless channels to per-
form online activity recognition. When using wear-
able sensors, its energy consumption plays a crucial
role, as it directly influences the long term usability of
the system. Thus, it is of great importance to keep the
energy consumption as small as possible, to prolong
the lifetime of the batteries. A considerable amount
of energy is used for the wireless transmission of raw
sensor data from the wearable sensors (Gr
¨
utzmacher
et al., 2017; Rault et al., 2017). In order to reduce
the overall energy consumption, the amount of wire-
lessly transmitted sensor data should be kept as low as
possible. In order to achieve application specific data
reduction the feature extraction stage of most ARCs
could be utilized. By extracting the features on the
wireless sensor node, the amount of communicated
data can be reduced.
While some researchers proposed calculating fea-
tures on wireless sensor nodes for energy efficiency
reasons (Van Laerhoven and Aronsen, 2007; Laer-
hoven et al., 2006; Lorincz et al., 2009), the actual
energy consumption highly depends on the design pa-
rameters of the activity recognition and does not allow
for generalized statements. There exists a trade-off
between the added computational effort on the sen-
sor side and the reduced wireless transmissions. This
trade-off needs to be estimated at design time in order
to substantiate early design decisions. As a solution,
this paper introduces an energy trade-off model con-
sidering the important design parameters of the activ-
ity recognition system. Our contributions are:
• examining important design parameters of fea-
ture extraction influencing the energy consump-
tion when performed on wireless sensor nodes,
• an energy trade-off model for application specific
feature extraction configurations,
• an evaluation of our model by four feature set im-
plementations on a wireless sensor node, and
• a delay analysis of our implementations.
The remainder of the paper is structured as fol-
lows: In Section 2 the related work is discussed,
which is followed by a concept description in Sec-
tion 3. In Section 4 our experimental setup is de-
Grützmacher, F., Hein, A., Beichler, B., Lepidis, P., Dorsch, R., Kirste, T. and Haubelt, C.
Energy Efficient On-Sensor Processing for Online Activity Recognition.
DOI: 10.5220/0006860100850092
In Proceedings of the 8th International Joint Conference on Pervasive and Embedded Computing and Communication Systems (PECCS 2018), pages 85-92
ISBN: 978-989-758-322-3
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
85

scribed, followed by the discussion of our results in
Section 5. In Section 6 conclusions are drawn.
2 RELATED WORK
As summarized in (Rault et al., 2017), the energy-
efficient design of wearable sensor devices has been
subject of research in the wireless sensor networks,
activity recognition, healthcare, and AAL domains
for many years. One general approach to reduce
power consumption is the reduction of communi-
cation overhead using efficient protocols (Ye et al.,
2002) or sensor network topologies (Younis and
Fahmy, 2004).
Several software architectures for activity recog-
nition systems have been studied to improve power
consumption: disabling hardware sensors using pre-
diction of activities has been proposed in (Gordon
et al., 2012) and (Wang et al., 2009). Saving com-
putational effort at a conceptual level can be done us-
ing feature selection (Yan et al., 2012), classifier se-
lection (Liang et al., 2014), or fixed-point arithmetic
(Anguita et al., 2013). These approaches are orthog-
onal to the approach investigated in the paper at hand
and can be combined for additional energy savings.
The principal of communication reduction by
performing on-board computations of wireless sen-
sor nodes has been introduced by several re-
searchers. Their works either focus on offline scenar-
ios (Van Laerhoven and Aronsen, 2007; Laerhoven
et al., 2006), sensor selection strategies (Lorincz et al.,
2009; Van Laerhoven and Aronsen, 2007; Laerhoven
et al., 2006; Zappi et al., 2008), or signal compres-
sion and abstraction approaches (Berlin and Van Laer-
hoven, 2012; Berlin and Van Laerhoven, 2010; Mam-
aghanian et al., 2011; Marcelloni and Vecchio, 2008).
However, except (Mamaghanian et al., 2011)
which focuses on sensor data compression, none of
the aforementioned works provide a quantified reduc-
tion of energy consumption of their approaches as no
explicit comparison to reference scenarios transmit-
ting raw data is done.
Rault et al. already indicated that a trade-off be-
tween communication reduction and added compu-
tational load has to be considered when performing
sensor-side computation (Rault et al., 2017). While
they propose to perform ”light” computations on the
sensor to keep the energy consumption for the addi-
tional computations as low as possible, we can show
that even calculating Fast Fourier Transform (FFT)
based features on the wireless nodes sensor subsys-
tems can lead to an overall energy reduction.
In (Gr
¨
utzmacher et al., 2017) we have shown for
one configuration, i.e. a window-based zero-crossing
rate on accelerometer data, that calculating it on the
wireless sensor node can reduce the energy consump-
tion by a considerable amount. Besides the evaluation
of more sophisticated feature sets, the paper at hand
studies the important design parameters of different
configurations influencing the energy consumption of
wireless sensor nodes.
3 CONCEPT
In online activity recognition with wireless sensor
nodes, the prevalent setup involves sensors sampled
at high sampling rates, e.g. 100Hz, which are trans-
mitted wirelessly to a host system for further process-
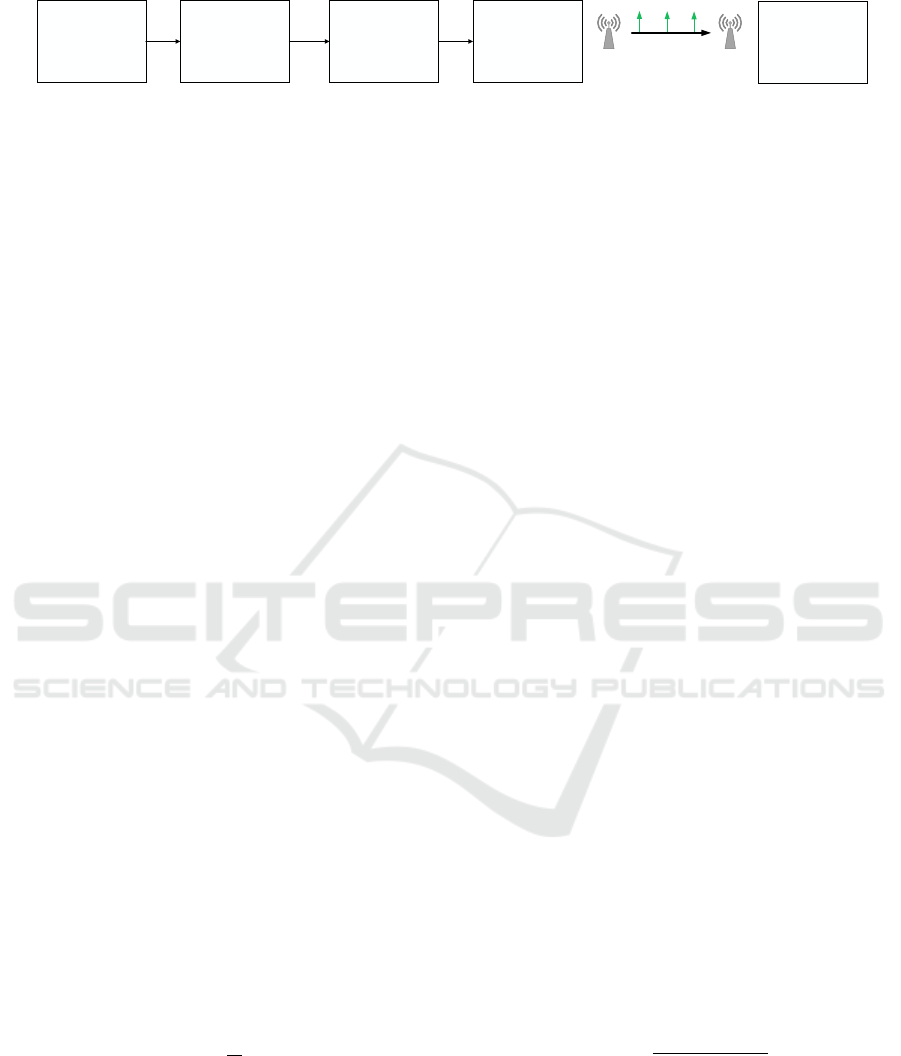
ing. As modern sensors already perform signal cor-
rection as a preprocessing step, the wireless commu-
nication usually takes place between the preprocess-
ing and segmentation stages of an ARC (see Figure 1).
Especially in settings which require energy efficient
designs like smartphones, wireless sensor nodes or
wearables, highly frequent wireless communication is
not desired, when targeting a low energy consump-
tion.
Examining the ARC, data reducing stages can be
identified. The feature extraction stage for example is
mainly implemented as a sliding window based fea-
ture extraction in most of the literature (Huynh and
Schiele, 2005; Kr
¨
uger et al., 2014; Atallah et al.,
2011; Capela et al., 2015). It often drastically re-
duces the data rate, as a relatively small number of
features is calculated from a high number of samples
of a window. Thus, the calculation of features, which
is included in an ARC anyway, could be shifted to
the wireless sensor node. Figure 1 shows this princi-
pal. While this approach can reduce a considerable
amount of energy, it highly depends on the design
parameters of the activity recognition (e.g. a sliding
window with 50% overlap halfs the data rate, com-
pared to a sliding window with 75% overlap). On the
other hand, the added computational effort has to be
taken into account as well, as it increases the energy
consumption of the processing units. The trade-off
between reduced data rate and added workload has to
be considered in order to estimate the resulting energy
savings.
3.1 Estimation of Energy Savings
As different features are useful to detect different
kinds of activities, the number and composition of
features varies amongst different applications.
PEC 2018 - International Conference on Pervasive and Embedded Computing
86
Data
Acquisition
Preprocessing Segmentation
Feature
Extraction
...
less frequent
transmissions
Figure 1: Activity recognition chain with on-sensor calculations up to and including the feature extraction stage.
Two aspects are decisive for the resulting energy
savings: the workload of the microcontroller and the
rate with which data is communicated over the wire-
less interface. We introduce an estimation method,
which is based on a combination of two energy mod-
els of the target architecture: a model which captures
the energy consumption of the communication, and
a model which captures the additional computational
load on the sensor device. As we are interested in the
change of energy consumption when varying the data
rate or the computational effort, both models are not
required to capture the absolute energy consumption,
but rather the relative average energy consumption to
both parameters. Thus, the resulting model is referred
to as energy trade-off model. It can be used to calcu-
late the difference in energy consumption of two con-
figurations.
As this model depends on two parameters, it be-
comes a surface in a three dimensional space. The
structure of the surface depends on the relation be-
tween the energy consumption and the two model pa-
rameters. Note, that the model parameters need to be
distinguished from the design parameters of the fea-
ture extraction. The model parameter capturing the
amount of communicated data can be calculated from
the design parameters of the feature extraction.
Since data is acquired from sensors, the amount
of data can be naturally captured by the output fre-
quency, of either raw samples or feature values.
Therefore, it is intuitive to describe the first model pa-
rameter in terms of a data transmission frequency f
d
.
Thus, the energy dependency on the amount of com-
municated data is described by function e
d
( f
d
). Note,
that the size of the data types transmitted with f
d
must
equal, when comparing two configurations.
The computational effort on the other hand can be
described in terms of processing load l
p
in %, defined
by the processing time t
p
in a fixed time interval T :
l
p
=
t
p
T
(1)
Since the calculation of feature extraction usually is
done in a sample-based or sliding-window based fash-
ion, which both is triggered with the sampling fre-
quency, it is obvious to use the sampling period as the
time interval T . This simplifies the processing load
to the average processing time per sample t
sp
. The
resulting energy dependency on the processing load
is described as function e
p
(t
sp
). Note, that the sam-
pling frequency describes at which rate sensor sam-
ples are acquired. This needs to be distinguished from
the data transmission frequency, which captures the
rate at which either raw samples or feature values are
communicated from the wireless sensor node. As we
will see in Section 4, both model parameters allow a
fast calibration, if e
d
( f
d
) and e
p
(t
sp
) are unknown for
a particular sensor node.
The resulting equation for calculating the differ-
ence of the energy consumption ∆e is:
∆e = e
d
( f
d
R
) − e
d
( f
d
T
) + e
p
(t
sp
R
) − e
p
(t
sp
T
), (2)
with f
d
R
and f
d
T
being the output frequencies and
t
sp
R
and t
sp
T
being the average computation times per
sample of the reference and the test configuration re-
spectively. Note, that this model assumes that com-
putational load and the amount of communicated data
influence the energy consumption in a additive way,
and both components do not influence each other
As shown in Section 4, the energy consumption of
our wireless sensor node on both model parameters
shows a linear behavior.
In that case, the resulting model becomes a plane
in a 3D space with the slopes m
d
for e
d
( f
d
) and m
p
for e
p
(t
sp
). Thus, the equation for ∆e resolves to:
∆e = ( f
d
R
− f
d
T
) ∗ m
d
+ (t
sp
R
−t
sp
T
) ∗ m
p
. (3)
In the following we will explain, how both model pa-
rameters can be acquired from the design parameters
of a certain set of features.
The output data rate f
d
of the feature values
mainly depends on the number of features N
F
, and
the sliding window rate f
SW
. The latter is calculated
from the sensor sampling frequency f
s
in Hz and the
sliding window parameters window size S
W
in Num-
ber of Samples and window overlap O
W
as a fraction
on the interval (0,1), by:
f
SW
=
f
s
(1 − O
W
) ∗ S
W
. (4)
The parameter f
d
can be calculated by:
f
d
= f
SW
∗ N
F
, (5)
for a configuration calculating the feature extraction
on the wireless sensor node or directly by using f
d
=
f
s
in a configuration of transmitting raw sensor sam-
ples. As we can see from Equations (3), (4), and (5),
Energy Efficient On-Sensor Processing for Online Activity Recognition
87
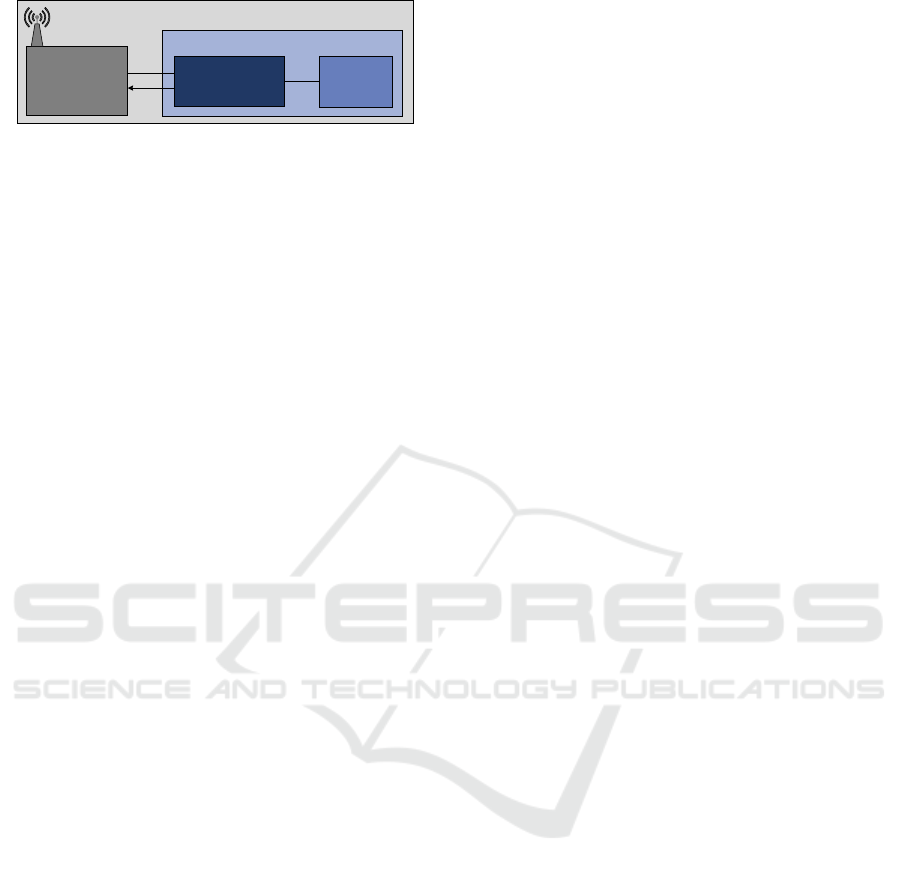
Wireless Sensor Node
BHI160 Sensorhub
DA14583
µC
I2C
INT
I2C
FUSER
96K ROM
48K RAM
ACC+GYR
BMI160
BTLE
Figure 2: Architecture of our custom wireless sensor node.
the resulting absolute data rate reduction depends on
the sampling frequency. Thus, the impact of energy
savings by calculating feature extraction on the wire-
less sensor node increases with the sampling rate of
the sensor.
For determining the workload dependency e
p
() of
the target configuration, different approaches are pos-
sible. A simple but fast way is the use of energy mod-
els which depend on the execution time of the feature
extraction code. Such models can be acquired by ex-
periments as we have done for our sensor node like
shown in Section 4.1. The workload can be calculated
by Equation (1), which only requires an estimation of
the average processing time per sample t
sp
of the fea-
ture extraction code.
The processing time t
sp
can be acquired by do-
ing worst-case execution time analysis on the assem-
bler code compiled for the target architecture. Fea-
ture extractions are usually performed using data flow
oriented algorithms with few branches. Furthermore,
different execution paths usually have neglectable dif-
ferences in their path lengths. Thus, the instruction
count of the assembler code together with the micro-
controller frequency and the cycles per instruction ac-
quired from their data sheets can be a fast way of es-
timating the execution time. This should be possible
for most wireless sensor nodes, as mainly microcon-
troller architectures are chosen, because of their low
power consumption. Typically microcontroller archi-
tectures neither have deep pipelines nor operating sys-
tems performing dynamic scheduling. Thus, the exe-
cution time of the assembler code is not subject to
essential variations.
However, there also exist more fine grained ap-
proaches, which directly model the energy consump-
tion of assembler instructions for a piece of source
code (Ruberg et al., 2015; Bazzaz et al., 2013).
4 EXPERIMENTS
In our experiments we used a custom wireless sen-
sor node which was designed for low power applica-
tions. It is equipped with an ultra low power BHI160
sensor hub from Bosch Sensortec (Bosch Sensortec,
2017), a Dialog Semiconductor DA14583 microcon-
troller with Bluetooth Low Energy (BTLE) interface,
acting as a host controller which is connected with
the BHI160 via I
2
C and a CR1225 coin cell battery
as power supply. For an overview see Fig. 2. In our
setup, the sensor node either sends raw samples or cal-
culated features to a Samsung Galaxy S5 smartphone,
acting as a data aggregating device. All on-sensor fea-
ture extractions are performed on the BHI160’s inte-
grated FuserCore in our experiments.
When evaluating the energy consumption of the
system we followed a similar approach introduced by
(Russell and Jacome, 1998) since it meets the neces-
sary requirements for comparing average energy con-
sumptions and it is easy to deploy. For current mea-
surement we are using a 10 Ω shunt resistor R
S
in se-
ries with the power source. In our experiments we
substituted the coin cell by a constant voltage source
providing 3.0 V supply voltage. The voltage drop U
S
over R
S
is captured and averaged by a DSO-X 3034A
oscilloscope from Agilent Technologies over a time
of at least 100 s with a resolution of 10 MSamples/s.
Due to its proportional nature, the average energy
consumption can be deduced from the measured av-
erage voltage drop with sufficient accuracy. The tem-
perature dependency was considered to be neglectable
in our setup, which could be substantiated with our
results for the model accuracy in Section 5.1. When
comparing the average voltage drop over time of dif-
ferent scenarios of the sensor, the systematic error of
the measuring apparatus and the tolerance of the shunt
resistor is canceled out and thus, propagation of un-
certainty can be neglected for our evaluations.
4.1 Model Calibration
In order to show how much energy could be saved
by reducing data communication, we measured the
energy consumption of our wireless sensor node pro-
viding accelerometer and gyroscope data at different
output data rates transmitted over BTLE. While vary-
ing the output data rates, all other factors like sensor
sampling rate, work load and energy mode are kept
constant for all measurements. The output data rate is
reduced by just skipping the corresponding number of
samples to be propagated to the sensor output. Fig. 3
shows the overall average energy consumption of the
sensor node at different output data rates as well as
the energy consumption without BTLE transmissions,
to show the fraction of energy consumed by wireless
transmissions.
It can be seen that the amount of data send via
BTLE can have a great impact on the nodes energy
consumption, especially at data rates like 100 Hz or
more, which are broadly used in the literature con-
PEC 2018 - International Conference on Pervasive and Embedded Computing
88
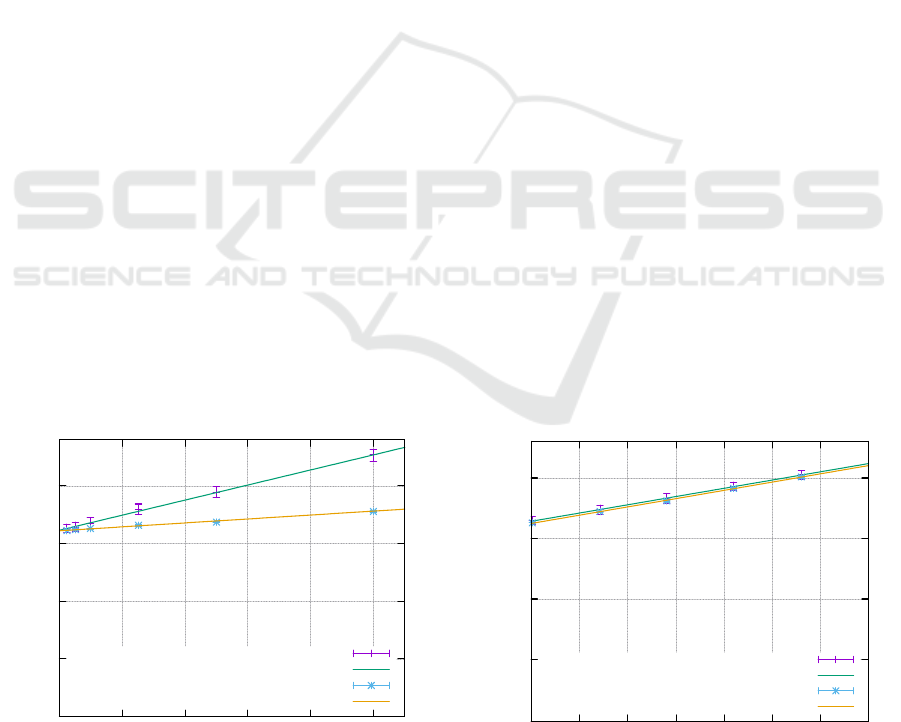
cerned with activity recognition.
In order to show the energy increase of the added
workload when calculating additional algorithms on
a sensor subsystem, we implemented synthetic pro-
cessing load by performing Multiply and Accumulate
(MAC) operations in a loop and measured their en-
ergy consumption as well as the average computation
time. We used MAC operations, since our feature im-
plementation including online versions of statistical
feature calculations as well as an FFT implementa-
tion, mainly consist of MAC operations. The pro-
cessing load is defined as the fraction of time the pro-
cessing unit is actively performing the additional cal-
culations, as described by Equation (1). The exper-
iments were done in the operating point at transmit-
ting accelerometer and gyroscope values with 2.5 Hz
as shown in Fig. 3. The resulting dependency can
be seen in Fig. 4. The trade-off between reduced
data rate and additional workload gets obvious, as re-
ductions in energy consumption caused by decreas-
ing the output data rate from 60 Hz to 2.5 Hz can al-
ready be neutralized when the additional workload
for doing that is more than approximately 57%. This
shows, that the trade-off between reduced communi-
cation and additional processing load needs to be ex-
plicitly evaluated for different configurations.
To calibrate our model we used the experimen-
tal results of the aforementioned measurings. As the
energy dependency of both model parameters is lin-
ear, the model is described by Equation (3). Both
slopes, m
d
and m
p
can be determined by calculat-
ing a regression of measuring values acquired for the
overall energy consumption. These lines are col-
ored green in Figures 3 and 4. The slopes of the
regression lines (m
d
= 0.0654172 mV /Hz and m
p
=
0.067873mV /average workload %) are used as the
calibrated model parameters.
0
5
10
15
20
0 20 40 60 80 100
U
s
[mV]overShuntResistor
f
d
[Hz]
RawDatawithBTLETransmissions
FitofRawDatawithBTLETransmissions
RawDatawithoutBTLETransmissions
FitofRawDatawithoutBTLETransmissions
Figure 3: The sensor nodes average energy consumption at
different output data rates of both accelerometer and gyro-
scope with and without BTLE communication.
4.2 Feature Sets
We implemented a feature extraction configuration on
the BHI160 sensor subsystem which showed good re-
sults for activity and intention recognition for meal
preparation and related activities in a kitchen sce-
nario (Kr
¨
uger et al., 2014). This feature set consists
of mean, variance, skewness, kurtosis, peak (domi-
nant frequency), and energy (magnitude of the domi-
nant frequency) on accelerometer and gyroscope data.
Both signals are sampled at 100 Hz and segmented
by a sliding window of 128 samples with an overlap
of 75%. This leads to a 12-dimensional feature vec-
tor with a sliding window rate of 3.125 Hz and is re-
ferred to as MVSKPE. This setup includes frequency
domain features by calculating an 128-point FFT. Due
to its high computational effort, we also implemented
a more lightweight feature set, by substituting peak
and energy by a zero-crossing rate (ZCR), since it
can also give an idea about with which average fre-
quency an sensor is shaken. This setup is referred to
as MVSKZ. In some literature, only statistical time-
domain features are used with mean and variance at
least (see (Dama
ˇ
sevi
ˇ
cius et al., 2016)). Therefore,
we also tested a feature set of mean, variance, skew-
ness and kurtosis referred to as MVSK, and a set of
mean and variance only, referred to as MV. All feature
sets have been implemented on the BHI160’s Fuser-
Core on our wireless node and its BTLE connection
interval was chosen as the maximal possible interval
which could still provide the necessary corresponding
data rate. In Fig. 5, our setup is shown.
In order to keep the computational effort for cal-
culating features on the sensor as low as possible,
we implemented the online version of mean, vari-
ance, skewness, and kurtosis from (John D. Cook,
2018), which is based on the one pass algorithms
0
5
10
15
20
0 10 20 30 40 50 60 70
U
s
[mV]overShuntResistor
AdditionalProcessingLoadl
p
[%]
RawDatawithBTLETransmissions
FitofRawDatawithBTLETransmissions
RawDatawithoutBTLETransmissions
FitofRawDatawithoutBTLETransmissions
Figure 4: Sensor nodes average energy consumption at 2.5
Hz output data rate and different additional workloads with
and without BTLE communication.
Energy Efficient On-Sensor Processing for Online Activity Recognition
89

Wireless Sensor Node
BHI160 Sensor Hub
Fuser
Core
µC
less frequent
wake-ups
less frequent
transmissions
ACC
Figure 5: Shifting the feature extraction to the sensor hub reduces the wake-up frequency of the host and wireless transmis-
sions.
for arbitrary-order statistical moments from (Pebay,
2008). This enables those features to be updated for
each new sample with a computational complexity
O(1). The implemented ZCR is a comparison of a
new sample with its preceding sample to detect a zero
crossing accumulated over the time of a sliding win-
dow. The implemented FFT is a 128-Point Radix-
2 implementation with 7 butterfly stages. All algo-
rithms use single precision floating point arithmetics.
5 RESULTS
The energy consumptions of MV, MVSK, MVSKZ,
and MVSKPE as well as the reference scenario of
sending raw accelerometer and gyroscope data at
100 Hz to a smartphone were measured. The mea-
sured improvement in energy consumption of each
feature set compared to the reference scenario is
shown in column ”Meas.” in Table 1. It can be seen
that by implementing our chosen feature sets on the
sensor node, the energy consumption is reduced by
20.53% to 26.8% compared to our reference scenario,
depending on the feature set.
Note, that the relative energy savings depend on
the overall energy consumption, including the en-
ergy consumption independent of the sensors work-
load and the BTLE transmission. Reducing this part,
e.g. by utilizing sleep modes of the host controller,
has a potential for considerable further reductions of
the overall energy consumption and thus a higher im-
pact of the studied approach.
From the model parameters of the implemented
feature sets in Table 2, it can bee seen that the data
reduction of our implementations range from 81%
to 93%, depending on the chosen feature configura-
tion. This results can cope with state of the art data
compression algorithms for wireless sensor nodes,
without neither introducing additional processing ef-
Table 1: Predicted and Measured Average Energy Savings.
Features Pred. [%] Meas. [%] Pred. Error [%]
MVSKPE 20.60 20.53 0.5%
MVSKZ 23.68 23.70 0.1%
MVSK 24.63 24.61 0.1%
MV 27.02 26.87 0.6%
fort, nor loosing information. Note, that by shifting
the feature extraction to the sensor subsystem of our
node, less computations on the smartphone have to
be performed as well, which should reduce its en-
ergy consumption as well. However, this is not further
evaluated in this work.
5.1 Model Accuracy
In order to evaluate the accuracy of our energy trade-
off model, we acquired the average computation time
of the reference scenario and the feature sets calcu-
lated on the BHI160’s FuserCore. We measured the
average computation time instead of using one of the
prediction methods from Section 3.1, in order to only
evaluate the model accuracy without additional pre-
diction uncertainties, as they may vary among differ-
ent methods. The results are shown in row l
p
of Ta-
ble 2. It can be seen that by calculating the ZCR in-
stead of the FFT features, the average workload can
be reduced from 10% to 4%.
With the differences of the average workload l
p
(Equation (1)) and the output frequency f
d
(Equation
(5)) between the feature set to be tested and the ref-
erence scenario, the savings in energy consumption
were estimated by our model (Equation (3)). The
model parameters used for the evaluation are shown
in Table 2. We compared the estimated savings with
the measured results for the selected feature sets and
calculated the error, which can be seen in Table 1. The
prediction error of our model is less than 1%, which is
small enough to make feasible estimations of energy
savings when considering feature calculations on the
sensor node at design time. Note, that the uncertainty
of the methods for predicting the additional average
workload from an existing implementation (Section
3.1) will further affect the overall prediction error cor-
respondingly.
Table 2: Model parameters for the selected features sets.
Features avg. workl. l
p
[%] output rate f
d
[Hz]
Raw 0.3 100
MVSKPE 10.4 18.75
MVSKZ 3.3 15.625
MVSK 3.2 12.5
MV 1.3 6.25
PEC 2018 - International Conference on Pervasive and Embedded Computing
90

Table 3: Actual and achieved processing delays.
Features proc. delay [ms] delay in our setup [ms]
MVSKPE 22.8 120
MVSKZ 0.34 110
MVSK 0.35 100
MV 0.14 80
5.2 Delay Analysis
As already stated in (Rault et al., 2017), the sensor-
side computation of features can influence the latency
of the activity recognition system. Therefore, we ana-
lyzed the processing delay for the features calculated
on the sensor. With timestamp functions we measured
the additional processing time of the feature extrac-
tion implementations.
We calculated the average processing time of at
least 200 measurements per feature set. These results
can be seen in Table 3 as ”proc. delays”. With calcu-
lating the feature extraction on the sensor itself, multi-
ple values (feature vector entries) per sliding window
are propagated to the sensor output in one batch, in a
very short time. As in our setup a microcontroller is
acquiring the sensor data for transmitting via BTLE,
which has a limited input data rate due to it’s firmware
implementation, we had to delay the output of fea-
tures on the sensor subsystem artificially. When the
features are calculated for a sliding window, the out-
put of each feature vector entry is delayed until the
next sensor value is sampled, which is 10 ms in our
case. Since the feature vector for scenario MVSKPE
has 12 entries which is the greatest feature vector
among our feature sets, the maximum delay in our ex-
periments is 120 ms. This and the delay for the other
feature sets can be seen in Table 3 as ”delay in our
setup”. Note, that the artificial delay in our setup was
necessary because of our firmware implementation on
the sensor node. With a BHI160 evaluation board, we
verified that this is not a general issue, but caused by
our particular setup. Only the feature entries for the
peak frequency and its magnitude have to be delayed
by approx. 30 ms, since the FFT calculation for all 6
axis takes longer than the 10 ms sampling period and
has to be distributed among 3 sampling periods. How-
ever, even 120 ms is a fairly good result for most ac-
tivity recognition tasks. Furthermore, the calculation
of features on multiple wireless sensor nodes is inher-
ently done in parallel, which might not be the case
when calculating the feature extraction for all sensors
on a data aggregating device, depending on its parallel
processing capabilities.
6 CONCLUSION
Our work investigates the idea of calculating the
feature extraction stage of activity recognition algo-
rithms on wireless sensor nodes. We have shown the
outcomes of this approach by porting four broadly
used feature sets to a BHI160 sensor subsystem resid-
ing on a wireless sensor node and compared the en-
ergy savings to reference scenarios transmitting raw
sensor samples instead. In our experiments, this ap-
proach reduced the energy consumption of the wire-
less sensor node by up to 27%.
To show the applicability of on-sensor feature ex-
tractions, we evaluated the processing delay of our
implementations, which was 120 ms at most.
More importantly, in our work we examined the
decisive design parameters for the resulting energy
trade-off when calculating data reducing stages like
feature extraction on wireless sensor nodes. From
these design parameters an energy trade-off model is
built which allows to estimate the energy savings of
sensor side feature calculations at design time. This
improves the development process of activity recogni-
tion systems as design decisions can be substantiated
early in the design process. By calculating the energy
savings from the model fitted to our wireless sensor
node and comparing it to four implemented feature
sets in our experiments, we achieved a model accu-
racy of more than 99%.
ACKNOWLEDGMENTS
This work is partially supported by the German Fed-
eral Ministry of Education and Research (BMBF),
grant number 03ZZ0519D.
REFERENCES
Anguita, D., Ghio, A., Oneto, L., Parra, X., and Reyes-
Ortiz, J. L. (2013). Energy efficient smartphone-based
activity recognition using fixed-point arithmetic. J.
UCS, 19(9):1295–1314.
Atallah, L., Lo, B., King, R., and Yang, G.-Z. (2011). Sen-
sor positioning for activity recognition using wearable
accelerometers. IEEE transactions on biomedical cir-
cuits and systems, 5(4):320–329.
Bazzaz, M., Salehi, M., and Ejlali, A. (2013). An accurate
instruction-level energy estimation model and tool for
embedded systems. IEEE Transactions on Instrumen-
tation and Measurement, 62(7):1927–1934.
Berlin, E. and Van Laerhoven, K. (2010). An on-line piece-
wise linear approximation technique for wireless sen-
sor networks. In Proc. of LCN’10, pages 905–912.
IEEE.
Energy Efficient On-Sensor Processing for Online Activity Recognition
91

Berlin, E. and Van Laerhoven, K. (2012). Detecting leisure
activities with dense motif discovery. In Proc. of Ubi-
Comp’12, pages 250–259. ACM.
Bosch Sensortec (2017). BHI160 / BHI160B - Ultra
low-power sensor hub incl. integrated imu. BST-
BHI160(B)-DS000-01.
Bulling, A., Blanke, U., and Schiele, B. (2014). A tutorial
on human activity recognition using body-worn iner-
tial sensors. ACM Comput. Surv., 46(3):33:1–33:33.
Capela, N. A., Lemaire, E. D., and Baddour, N. (2015).
Feature selection for wearable smartphone-based hu-
man activity recognition with able bodied, elderly, and
stroke patients. PloS one, 10(4):e0124414.
Dama
ˇ
sevi
ˇ
cius, R., Vasiljevas, M.,
ˇ
Salkevi
ˇ
cius, J., and
Wo
´
zniak, M. (2016). Human activity recognition in
aal environments using random projections. Compu-
tational and mathematical methods in medicine, 2016.
Gordon, D., Czerny, J., Miyaki, T., and Beigl, M. (2012).
Energy-efficient activity recognition using prediction.
In Proc. of ISWC ’12, pages 29–36.
Gr
¨
utzmacher, F., Wolff, J.-P., Hein, A., Lepidis, P., Dorsch,
R., Kirste, T., and Haubelt, C. (2017). Towards energy
efficient sensor nodes for online activity recognition.
In Proc. of IECON’17, pages 8291–8296. IEEE.
Huynh, T. and Schiele, B. (2005). Analyzing features for
activity recognition. In Proc. of sOc-EUSAI ’05, pages
159–163, New York, NY, USA. ACM.
John D. Cook (visited 03/2018). Comput-
ing skewness and kurtosis in one pass.
https://www.johndcook.com/blog/skewness kurtosis/.
Kr
¨
uger, F., Nyolt, M., Yordanova, K., Hein, A., and Kirste,
T. (2014). Computational state space models for activ-
ity and intention recognition. a feasibility study. PloS
one, 9(11):e109381.
Laerhoven, K. V., Gellersen, H.-W., and Malliaris, Y. G.
(2006). Long term activity monitoring with a wearable
sensor node. In Proc. of BSN’06., pages 4–pp. IEEE.
Liang, Y., Zhou, X., Yu, Z., and Guo, B. (2014). Energy-
efficient motion related activity recognition on mobile
devices for pervasive healthcare. Mobile Networks
and Applications, 19(3):303–317.
Lorincz, K., Chen, B.-r., Challen, G. W., Chowdhury, A. R.,
Patel, S., Bonato, P., Welsh, M., et al. (2009). Mer-
cury: a wearable sensor network platform for high-
fidelity motion analysis. In SenSys, volume 9, pages
183–196.
Mamaghanian, H., Khaled, N., Atienza, D., and Van-
dergheynst, P. (2011). Compressed sensing for real-
time energy-efficient ecg compression on wireless
body sensor nodes. IEEE Transactions on Biomedi-
cal Engineering, 58(9):2456–2466.
Marcelloni, F. and Vecchio, M. (2008). A simple algo-
rithm for data compression in wireless sensor net-
works. IEEE communications letters, 12(6).
Pebay, P. P. (2008). Formulas for robust, one-pass parallel
computation of covariances and arbitrary-order statis-
tical moments. Technical report, Sandia National Lab-
oratories.
Rault, T., Bouabdallah, A., Challal, Y., and Marin, F.
(2017). A survey of energy-efficient context recogni-
tion systems using wearable sensors for healthcare ap-
plications. Pervasive and Mobile Computing, 37:23–
44.
Ruberg, P., Lass, K., and Ellervee, P. (2015). Microcon-
troller energy consumption estimation based on soft-
ware analysis for embedded systems. In Proc. of
NORCAS’15, pages 1–4. IEEE.
Russell, J. T. and Jacome, M. F. (1998). Software power
estimation and optimization for high performance, 32-
bit embedded processors. In Proc. of ICCD’98, pages
328–333. IEEE.
Van Laerhoven, K. and Aronsen, A. K. (2007). Memoriz-
ing what you did last week: Towards detailed actigra-
phy with a wearable sensor. In Proc. of ICDCSW’07.,
pages 47–47. IEEE.
Wang, Y., Lin, J., Annavaram, M., Jacobson, Q. A., Hong,
J., Krishnamachari, B., and Sadeh, N. (2009). A
framework of energy efficient mobile sensing for au-
tomatic user state recognition. In Proc. of Mobisys
’09, pages 179–192. ACM.
Yan, Z., Subbaraju, V., Chakraborty, D., Misra, A., and
Aberer, K. (2012). Energy-efficient continuous ac-
tivity recognition on mobile phones: An activity-
adaptive approach. In Proc. of ISWC ’12, pages 17–
24. IEEE.
Ye, W., Heidemann, J., and Estrin, D. (2002). An energy-
efficient mac protocol for wireless sensor networks. In
Proc. of INFOCOM ’02, volume 3, pages 1567–1576.
IEEE.
Younis, O. and Fahmy, S. (2004). Heed: a hybrid, energy-
efficient, distributed clustering approach for ad hoc
sensor networks. IEEE Transactions on mobile com-
puting, 3(4):366–379.
Zappi, P., Lombriser, C., Stiefmeier, T., Farella, E., Roggen,
D., Benini, L., and Tr
¨
oster, G. (2008). Activity recog-
nition from on-body sensors: accuracy-power trade-
off by dynamic sensor selection. In Wireless sensor
networks, pages 17–33. Springer.
PEC 2018 - International Conference on Pervasive and Embedded Computing
92
